1. Introduction
Relying on the rapid development and huge progress of computational technology, CFD (computational fluid dynamics) has become a useful tool for ship design. CFD and towing tank experiments can assist each other and make the best of their own advantages to achieve different design goals. By managing the simulation case size properly, CFD can be inexpensive and less time-consuming. Building a real ship model is not required for CFD study, and CFD is also not constrained by towing tank schedules and facility location. Moreover, the detailed analysis of local flow field is easier using CFD results because not every towing tank is capable of conducting PIV (particle image velocimetry) measurements. It is important for fluid dynamists to understand detailed flow phenomena and then make further modifications and improvements. Thus, ship engineers can utilize CFD in initial design stages. After analysis iteration between simulations and numerous different geometries, suitable or optimal ones or several optional designs can be chosen for further investigation, for example, towing tank experiments or more detailed CFD simulations.
The objective of the present work is to reduce the total resistance for a ship hull form integrated with a sonar dome at the ship bow. Based on the existing towing tank resistance data of the ship model, its hull-mounted sonar dome shape was further designed and optimized by using CFD. The design condition was cruise speed, i.e., the speed at which the ship advances most of the time. The resistance reduction would provide fuel savings, and the associated flow field improvements, such as smaller flow separation, could be beneficial to the sensor (sonar) detection capability. Therefore, the flow field phenomena, such as flow separation, boundary thickness and wake length around the sonar dome, were analyzed by CFD solution as well.
Regarding the hull form with sonar dome for academic research, DTMB (David Taylor Model Basin) 5415 is the most worthy one mentioned. Its geometry details and experimental data were released by the ONR (Office of Naval Research) in the early 1980s. Since then, it has been studied by many researchers. The design ship speed is at Fr (Froude number) equal to 0.25 and 0.41, corresponding to full scale 18 and 30 knots (for a 142 m long ship). On the other hand, CFD has been coupled by optimization algorithm or software to design the ship hull form of DTMB 5415 or its bow shape.
Kim et al. [
1] considered nine parameters, including entrance angle, sonar dome height and size, etc. To change DTMB 5415 geometry, the shifting method based on sectional area curve and radial basis function interpolation were used. Ship resistance was estimated by Neumann–Michell linear theory, while seakeeping performace was evaluated by Bales’ ranking method. In conclusion, in Case-III at Fr = 0.28 and 0.45, the lowest resistance was achieved with the highest seakeeping rank. Compared with the original 5415 hull, the wet area and displacement only increased 1% and 1.6%, respectively, for the optimal hull form.
The software CAESES was utilized by Feruglio [
2] to parameterize the DTMB 5415 hull. For the ship bow, the parameter of FFD (free-form deformation) considered the length, width, dpeth and angle of the bulbous bow. The ship stern shape was re-built by NURBS (nonuniform rational B-spline) curves. The ship resistance was predicted by using OpenFOAM. Two stages were performed to design the 5415 hull. First, 60 different hull geometries were analyzed, and then according to the result, the parameter range was narrowed down to select 40 geometry changes. Linear, Kriging and ANN (artificial neural network) were optional methods. Finally, they realized that the optimal solution had been achieved in the first stage, which reduced 9.94% resistance at Fr = 0.28. During optimization, it was found the resistance increases as the bow becomes wider and deeper, and a shorter bow decreases the resistance.
In Zhang et al. [
3], Opt LHD (optimal Latin hypercube design) and NLPQL (non-linear programming by quadratic Lagrangian) were combined for optimization. The geometry change was performed by using ASD (arbitrary shape deformation) based on B-spline in the commerical software Sculptor. CFD software Star-CCM+ was used, in which the flow field and rigid body motion solver were coupled by overset grid and DFBI (dynamic fluid body interaction). The free surface and waves were modeled by VOF (volume of fluid). After optimization, the sonar dome of the model 5512 hull form (BTMB 5415’s geosim) protuded forward becoming longer and sharp. In calm water, the resistance per displacement reduced by 1.56, 3.04 and 3.89% for Fr = 0.19, 0.28 and 0.34, respectively. Instead, in waves (wave length equal to ship length) the difference of the heave and pitch motion response was not obvious. At one-quarter wave ecounter period (
Te), the original and optimal 5512 hull had the shollowest draft. At three-quarters
Te, both drafts reached their deepest. However, the lower pressure distribution on the optimal sonar dome appeared lower. Additionally, at one-quarter, one-half and three-quarters
Te, the smaller ship-making wave amplitude around the ship bow and shoulder was found.
Tahara et al. [
4] used CFDSHIP-IOWA for ship resistance simulation. Model 5415-A was optimized by MOGA (multi-objective genetic algorithm), and CAD (computer-aided design) for geometry changes. Model 5415-B was the result of the optimizer UNICO (uniform covering) with FFD. The seakeeping performance was evaluated by strip theory for both. At Fr = 0.28, the resistance reduction was 5.02% and 3.78% for 5415-A and -B, respectively. The seakeeping index function for Fr = 0.28 and 0.41 was reduced around 1% for 5415-A and 2% for 5415-B. In addition, the towing tank test was conducted for 5415-B and 4.75% resistance reduction was measured. Later, FLOWPACK was deveopled by Tahara et al. [
5]. Using MOGA along with a CAD module named NAPA, the ship shape was modified by changing IGES (initial graphics exchange specification) format and outputed for the grid generator. First, by manually controlling NAPA, the ship resistance was lowered up to 10.1%. Next, the design constraints were exerted strictly on the automatically executed NAPA. However, due to slightly increased displacement, the resistance reduction was 7.8%. Compared with the original geometry, the maximal width of the optimal sonar dome decreased 7.7% but elongated 39.5% with a smaller entrance angle and curved tail. The conclusion supported the geometry change trend in [
4], but a further improved result was provided.
Diez et al. [
6] and Grigoropoulos et al. [
7] designed the 5415 ship hull by using three optimization methods based on potential flow theory, INSEAN/UI, NTUA and ITU, and then used CFD software ISIS-CFD to evaluate the result. The design condition was Fr = 0.25 and 0.41. The design target was the resistance ratio F1, and seakeeping performance index F2 representing the vertical acceleration of s the hip bridge. F1 and F2 were both weighted and standardized. The most accurate method was NTUA, which under-estimated F1 by 6.1%. At Fr = 0.25, 8.8% resistance reduction was gained, but the resistance increased 3% at Fr = 0.41. F2 was merely over-predicted by 0.7%, and from the original 5415 to optimal solution F2 reduced by 6%. In INSEAN/UI, the resistance was calculated by integrating the pressure on the double body model with Neumann–Kelvin linearization. The ship motion solver was strip theory. The optimizer was MODPSO (multi-objective extension of the deterministic particle swarm optimization). The geometry was deformed by orthogonal function. ITU used the Dawson method to estimate resistance, and the strip theory program SHIPMO for ship motion. The optimization method combined neural networks and SQP (sequential quadratic programming). The shape was modified by Akima cubic B-spline. The resistance and ship motion program for NTUA were SWAN2 and SPP-86, respectively. The optimization was performed by NSGA-II (non-dominating sorting genetic algorithm-II). The geometry was changed by the commerical software CAESES.
In this study, the CFD solver is OpenFOAM 6 without consideration of ship motions. The design target is the ship total resistance, and the flow field is analyzed around the sonar dome at the ship cruise speed. The main particulars of the hull geometry were kept at the fixed length, width and depth of the original sonar dome. The control points of NURB surface on sonar dome are adjusted locally and manually to generate new geometry by using Rhinoceros 6. The main considerations for geometry changes are the dome back slope (trailing edge) and its front tip (leading edge).
2. Geometry and Test Conditions
The ship model length (length between perpendiculars) is
L =
LPP = 3 m. The beam (maximum beam of waterline) is
BWL = 0.39 m and the draft is
t = 0.115 m. The Block coefficient is
CB = 0.52. The ship model was in bare-hull condition in this study, as shown in
Figure 1. The calm water resistance experiment was conducted in the towing tank at National Cheng Kung University. The environmental conditions were at water temperature 26.2 °C, so the water density was
ρ = 996.73 kg/m
3 and the dynamic viscosity was
v = 8.6905 × 10
−7 m
2/s. The ship model speed was 1.248 m/s, corresponding to Froude number Fr = 0.23 and Reynolds number
Re = 4.307 × 10
6. Fr = 0.23 is the cruise speed of the ship.
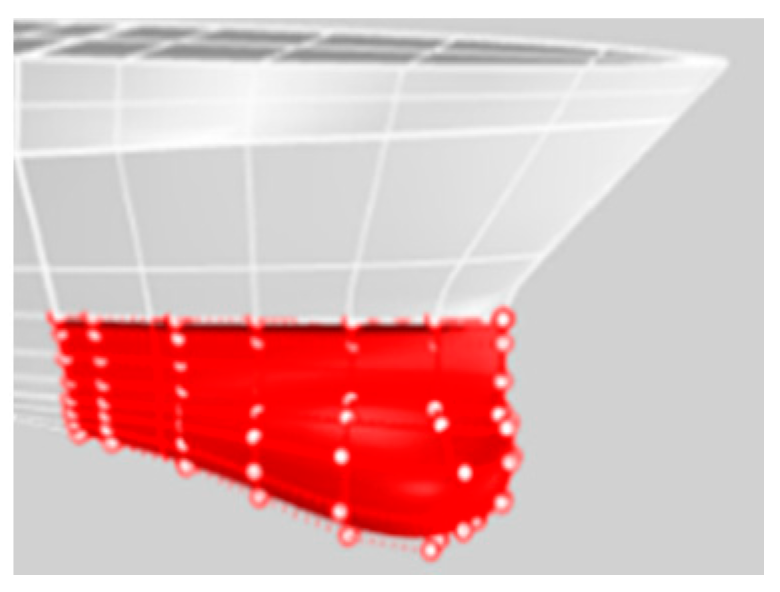
In
Figure 1, the focus of the present work, the sonar dome is marked by the red lines. Its surface geometry is modified for optimization, but the other part of the ship hull is not changed. The geometry change method is to adjust the control points of the NURBS surface to generate a sonar dome surface (see
Figure 2).
Figure 3 indicates the major control points used here, which are mainly along the bottom of the sonar dome. The back slope of the sonar dome is the main target since its shape was found to be concave, e.g., control points (pt.) b and c are located inward, away from lines a–d. It was expected to cause negative influences, such as separation flow (explained in
Section 4). The geometry change procedure is summarized as follows:
- (1)
Adjust the back slope
θ as defined in
Figure 3 between lines a–d and the horizontal axis originating from the control point d to downstream.
- (2)
Move pt. b and c to lines a–d. An example is demonstrated in
Figure 4.
- (3)
Further improve the detailed geometry (e.g., front-edge fairing) for selected cases.
Figure 4.
Control point b and control point c in Step (2).
Figure 4.
Control point b and control point c in Step (2).
The sonar dome design splits into two types in step (1): Types A and B. Type A ensures less influence on the interior equipment installation and is able to re-use the non-steel dome part. Thus, only pt. d is shifted horizontally. Type B is designed to allow larger shape deformation. Therefore, pt. d and e were shifted together horizontally.
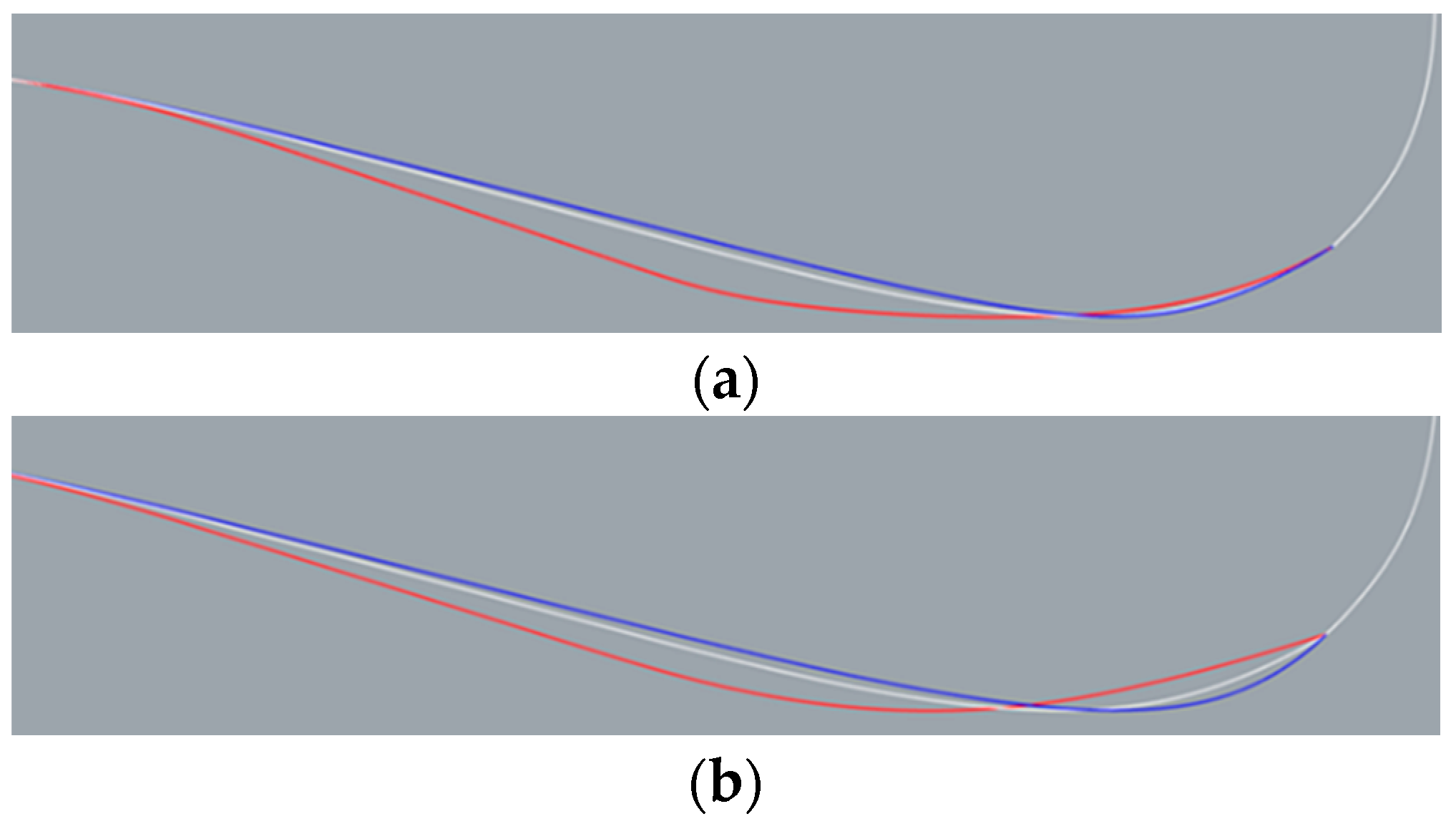
Figure 5a,b shows the result of step (1) for Types A and B, respectively. For Type A,
θ = 14.113° (red line)–18.718° (blue line). For Type B,
θ = 14.113° (red line)–17.414° (blue line). The
θ range was based on the trend of resistance result presented in
Section 4, and
θ = 14.113°, 17.414° and 18.718° corresponds to pt. d shifting 0.03 m upstream, 0.07 m downstream and 0.1 m downstream, respectively. The original sonar dome has
θ = 14.967°, corresponding to the white line in
Figure 5a,b for the same geometry.
Figure 6 shows the result of step (2) for both types. For Type A, the major deformation is the downward inflation of the back slope. For Type B, the geometry change includes a modified back slope similar to Type A but with much more shrinking at the front bottom.
The nomenclature of the sonar dome configuration is A
θ or B
θ, e.g.,
θ = 14.967° corresponds to A14.967 and B14.967. They are the original sonar dome with the step (2) change, as shown by the white line in
Figure 6a,b. Except for A14.967 = B14.967 (both are the same geometry), the Types A and B geometry are different for the other
θs.
In step (3), the optimal Type B, i.e., B17.018 (see
Section 4.2), was selected to perform front-edge fairing to smooth the discontinuous and sharp tip caused by the much more significantly shrinking front bottom mentioned previously. Two kinds of front-edge fairing were performed as indicated in
Figure 7: depending on moving pt. f to f’ horizontally or vertically, B17.018h or B17.018v, respectively, was generated.
3. CFD Methods
The CFD tool in the present work is OpenFOAM (Open Source Field and Manipulation) V6. The two-phase incompressible flow model VOF (volume of fluid [
8]) was used to consider the free-surface effect and the ship’s wave-making resistance, which was included in the ship total resistance measured in the towing tank. The velocity and pressure field, turbulence and free surface elevation were solved around the ship’s SST (shear stress transport)
k-ω turbulence model [
9], and the PIMPLE velocity and pressure coupling algorithm [
10] were utilized. The numerical schemes of the flow field solver are listed as follows: the first-order Euler implicit method with local time stepping for time differential term, the first-order central difference for gradient term, the second-order upwind method for the divergence term, the linear interpolation for Laplacian term and control point value between two volumes (or two surfaces) and the second-order explicit scheme with non-orthogonal correction for the surface normal direction gradient.
Only half-sized flow field (star-board side) was simulated because of the flow symmetrical conditions. The computational domain lengths were around 3
L and 1
L before ship front and aft perpendicular, respectively, which were long enough to avoid truncation error. According to the towing tank size, the distances were 4 m to the bottom and 4 m to the side. Refer to
Figure 8a,b for the domain size. The finer grid density can be seen allocated near the free surface and the ship body allocated gradually from the boundaries. Since the sonar dome was our design target, an additional grid refinement covering the ship bow under water was added to describe the geometry changes and details, as shown in
Figure 8c. A Cartesian grid was initially constructed for the far field grid and then split into an unstructured body-fitted grid near the body surface. The grid element is mainly hexahedral. The element size inside the ship bow refinement was controlled to be around 0.01 m and around 1:1:1 in the
X,
Y and
Z directions. In the present work, the
X direction points downstream with the origin (0, 0, 0) at the cross point of the ship FP and the undisturbed free surface. The
Y direction points to the ship’s portside. The
Z direction points upward. The vertical grid size near the free surface was around 0.01 m as well. The boundary layer grid was built for three layers, with the first layer thickness around 0.01 m to control
y+ ~ 150 to remain in the logarithmic layer range (
y+ = 30–200). The
y+ is the non-dimensional distance between the wall and the control point of the first layer grid. Thus, near-wall treatment was required (next discussed for
Table 1).
The boundary conditions listed in
Table 1 are imposed on the boundary faces shown in
Figure 8a,b.
U is the flow velocity, which is a vector value;
P is the fluid static pressure (excluding hydrostatic pressure);
ω is the turbulence dissipation rate;
vt is the turbulence viscosity coefficient; and
k is the turbulence kinetic energy.
α is the volume fraction of VOF to distinguish the air–water ratio inside one grid cell. Here,
α = 0 for air and
α = 1 for water, so
α = 0.5 corresponds to the location of the free surface. On the inlet, side and bottom boundaries, the fixed values of uniform inflow were applied as in Equation (1) below:
The ω, μt and k values in Equation (1) were estimated based on free stream turbulence.
As zero gradient condition was specified, the flow variables
Q, such as
P (inlet, side and bottom),
μt (top and outlet),
k and
α (hull and sonar dome surface), are substituted into the following Equation (2):
The symmetric condition was used on the mid-plane as shown in
Table 1 and Equation (3). It imposes a zero-gradient for all flow variables in the normal direction (
n) of the plane.
Equation (4) is the so-called pressureInletOutletVelocity condition in OpenFOAM, which was used on the top boundary to ensure no fluid reversely flowing back into the domain. An additional statement: zero tangential velocity (
Ut) is forced once inverse flow occurs and was attached along the zero-gradient velocity condition, i.e.,
Q = U for Equation (2).
On the top boundary, the total pressure was fixed to the reference pressure equal to zero in the infinite far field. However, as Equation (5) states: once the fluid flows into the domain, the dynamic pressure is removed.
The boundary condition called inletOutlet was applied as in Equation (6) and describes
ω and
k (top and outlet) and
α (top). It is a variation of the zero-gradient condition which is represented in Equation (2), but if inverse flow occurs, the inflow fixed values in Equation (1) are recovered.
Equation (7) is named the outletPhaseMeanVelocity condition in OpenFOAM to ensure the conservation of water and air between flow-in and flow-out. It is a modified zero-gradient velocity boundary condition which was used on the outlet boundary, i.e.,
Q = U for Equation (2), but
U is adjusted based on mean flux of the two phases in the case of inverse flow.
To maintain the water level from inlet, at outlet a conditional zero-gradient condition variableHeightFlowRate was imposed for
α, as explained in Equation (8). Accordingly, the
α solution is secured in the range between 0 and 1.
No-slip conditions, such as Equation (9,) give zero velocity for the solid surfaces, including the hull and sonar dome.
Moreover, near-wall treatment was achieved by applying Equations (10) and (11) for
μt and
ω:
wherein the surface roughness was considered in Equation (10) by setting the equivalent roughness height
Ks = 100
−6 and the roughness constant
Cs = 0.5. Both are common values.
wherein
k+ is the non-dimensional turbulence kinetic energy.
Before designing the sonar dome, we needed to make sure our CFD method was reliable. The VV (verification and validation) analysis was conducted for the ship hull with the original sonar dome, and the sonar dome design followed the same CFD setup and method. The VV theory is based on ITTC 7.5-03-01-01 [
11]. For verification, at least three different grid densities were suggested to check the grid independence, i.e., grid convergence. For validation, the factor of the safety method with correction factor was proposed to evaluate grid uncertainty (
UG). Here, the refinement ratio between two different grid densities was
in the
X,
Y,
Z directions which were set for the boundaries initially. The unstructured grid solver constructed the coarse, medium and fine grids as shown in
Figure 8d, and their total grid numbers are listed in
Table 2. The grid number ratio was controlled around
. For validation, the numerical uncertainty is compared with the simulation error.
Section 4.1 proves that the CFD method was verified and validated. Accordingly, the medium grid is chosen for the sonar dome design in the consideration of the computational time consumption and a grid size small enough to capture flow field characteristics. For all different geometries, the total grid number was controlled near 1.44 M, with a change of less than 120 grid points. The same verification method was applied to the optimal designs to ensure grid convergence, and their total grid numbers are listed in
Table 2.
5. Discussion
In this paper, firstly a CFD grid system and simulation method using OpenFOAM were verified and validated successfully for the original sonar dome. The medium grid with 1.44M grids was selected for the sonar dome design in order to strike a balance between computational time consumption and flow field resolution. Two types of sonar dome design were proposed. Type A ensured less influence on the interior equipment installation and enabled the re-use of the non-steel dome part. By contrast, Type B allowed larger shape deformation. For Type A, A17.830 achieves almost 2% resistance reduction. Type B could lower the resistance more and the optimal B17.018 provided 2.3% resistance reduction. With proper dome front-edge fairing, B17.018v could even further decrease the resistance reduction, up to 3.3%. The resistance reduction was mainly due to the pressure resistance decrease. The gird dependence and uncertainty level were checked and satisfied as well for A17.830, B17.018 and B17.018v.
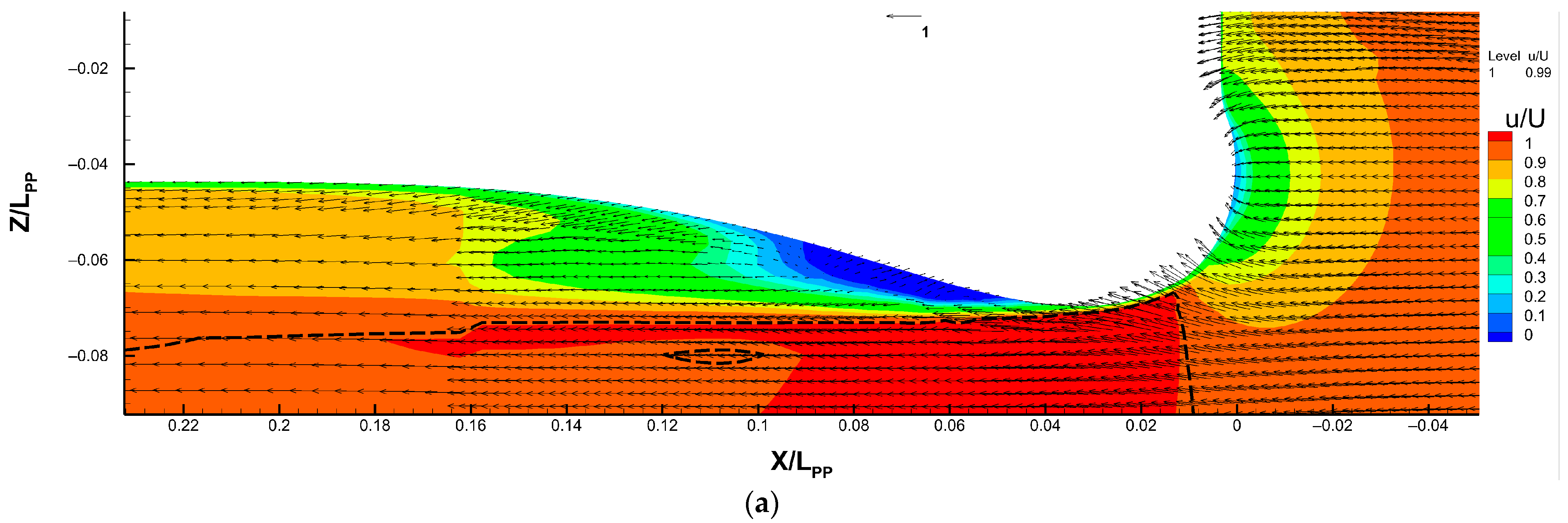
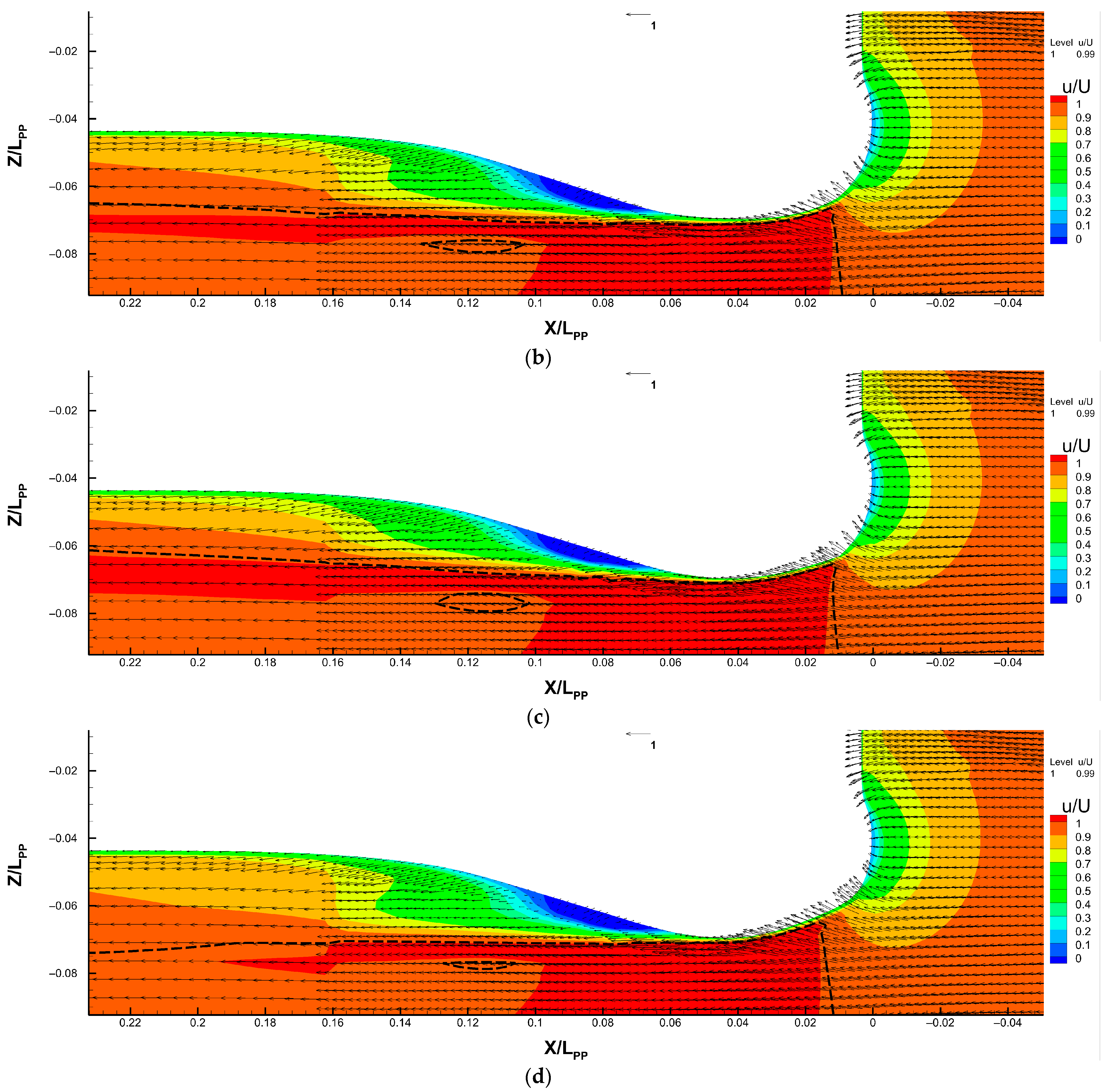
Flow field analysis showed smaller flow separation areas, thinner boundary layers and shorter wake lengths behind the sonar dome slope and longer and larger u/U > 1 areas around the hull for A17.830 and B17.018 in comparison with the original sonar dome. However, B17.018v resulted in worse than the abovementioned flow field characteristics compared with B17.018. The reason B17.018v could provide better resistance reduction is that the front-edge fairing assisted the flow below the sonar dome accelerate much more with a larger area. The pressure distribution on the bow surface supported the conclusion for the velocity field analysis and pressure resistance reduction. B17.018v showed smoother pressure distribution changes covering a larger area along the front edge than B17.018.
The conclusion addresses the possibility to further improve the flow field for B17.018v. With the faired sonar dome front edge, its back slope, θ, should be examined again in future work for the optimal situation. The design loop or iteration between front-edge fairing and back slope may be required.
The remaining challenge and future work are the suitability of the optimal geometry for different ship speeds and full-scale ships since the verification and validation (VV) were only satisfied for one ship speed. For different ship speeds, the CFD prediction would deviate from the experimental value. Different grid generation methods might be required for different speeds. At low speed, the layer grid on the solid surface needs to be generated carefully to resolve the thicker boundary layer. For higher speed, instead, the grid around the free surface should be distributed properly to capture the large ship making wave amplitude. The resistance reduction of the sonar dome design might still be effective at high ship speeds. To consider the scale effect, based on a particular full-scale estimate method, e.g., either the Froude (2D) or Hughes (3D) method, model ship CFD simulation and the full-scale estimate from it should obtain a similar trend for resistance reduction. Performing full-scale CFD simulation will be an option. However, due to the lack of full-scale experimental data, how to perform full-scale simulation or estimate properly will be investigated in the future.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}