
A Computationally Efficient and Virtualization-Free Two-Dimensional DOA Estimation Method for Nested Planar Array: RD-Root-MUSIC Algorithm



Abstract
:1. Introduction
- We use NPAs instead of UPAs and CPAs to further expand the array aperture and obtain better estimation results;
- We use the reduced dimension and root-finding MUSIC algorithm for 2D DOA estimation. The proposed algorithm changes the 2D spectral search into two 1D estimation problems and then transforms the 1D estimation problem into a root finding problem of a 1D polynomial, which reduces the complexity while maintaining the estimation accuracy;
- We regard the nested array as extracted from a uniform array with the same array aperture and use the polynomial root finding method to deal with the problem, avoiding the virtualization process of NPA.
Notations
2. Data Model
3. The Proposed Algorithm
3.1. D-MUSIC Spectrum Function
3.2. Root-Finding Process of Reduced-Dimensional Polynomial
3.3. Parament Pairing and DOA Estimation
3.4. The Main Steps of the Proposed Algorithm
4. Performance Analysis
4.1. Complexity Analysis
4.2. Cramer-Rao Bound
4.3. Achievable DOFs
4.4. Advantages
- The proposed algorithm transforms the problem of 2D spectral search into two 1D polynomial root finding problems, which greatly reduces the complexity compared with the traditional 2D-MUSIC algorithms such as the 2D-PSS algorithm;
- Compared with other 2D DOA estimation method for NPAs, the proposed algorithm avoids virtualization steps and spatial smoothing, so it has lower complexity than ESPRIT-NPA;
- The proposed algorithm fully utilizes the expanded aperture and DOF of the NPA, allowing it to achieve a higher DOF and array aperture compared to RD-ROOT-UPA and 2D-PSS algorithms based on uniform arrays.
5. Simulations
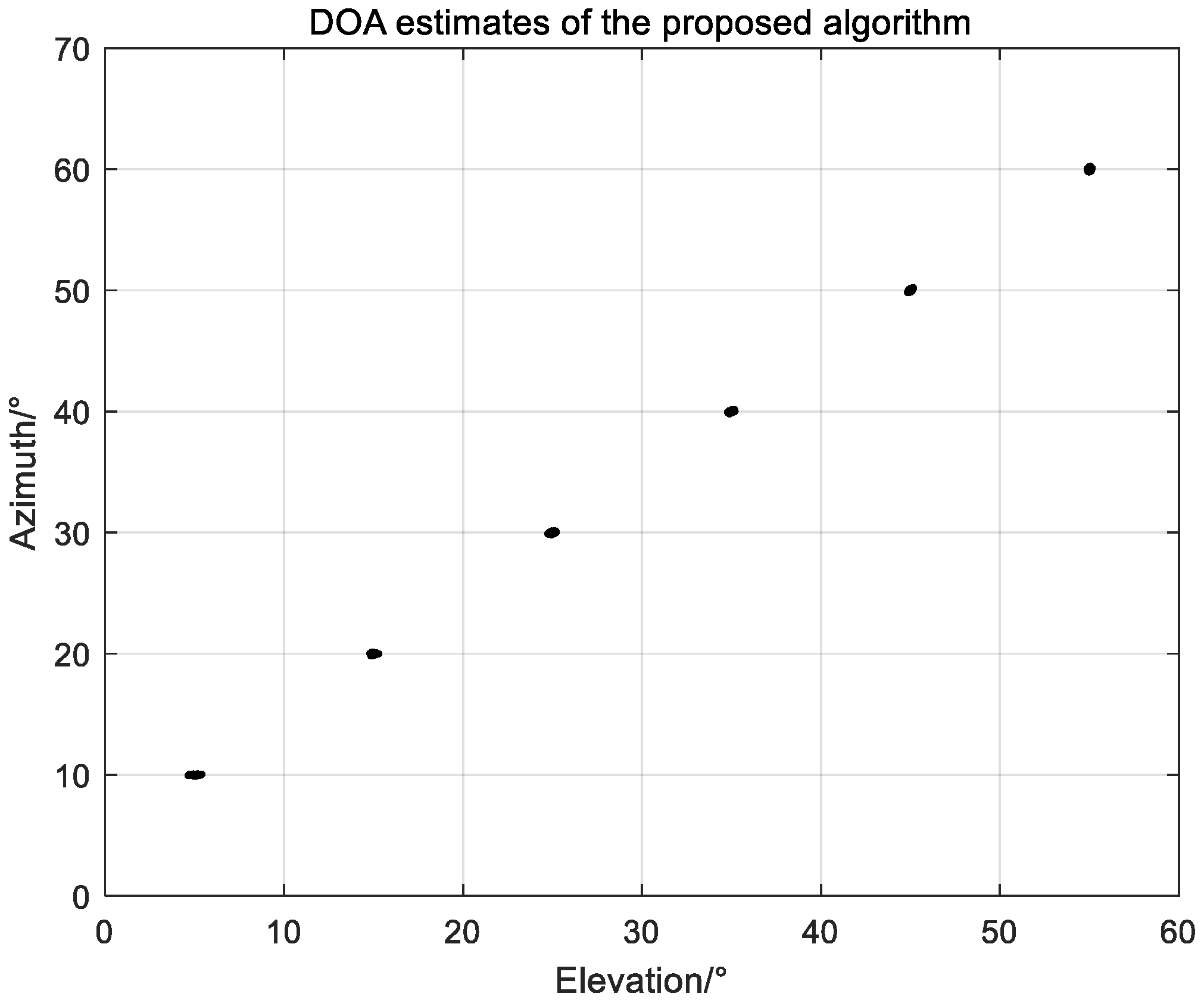
5.1. Scatter Figure
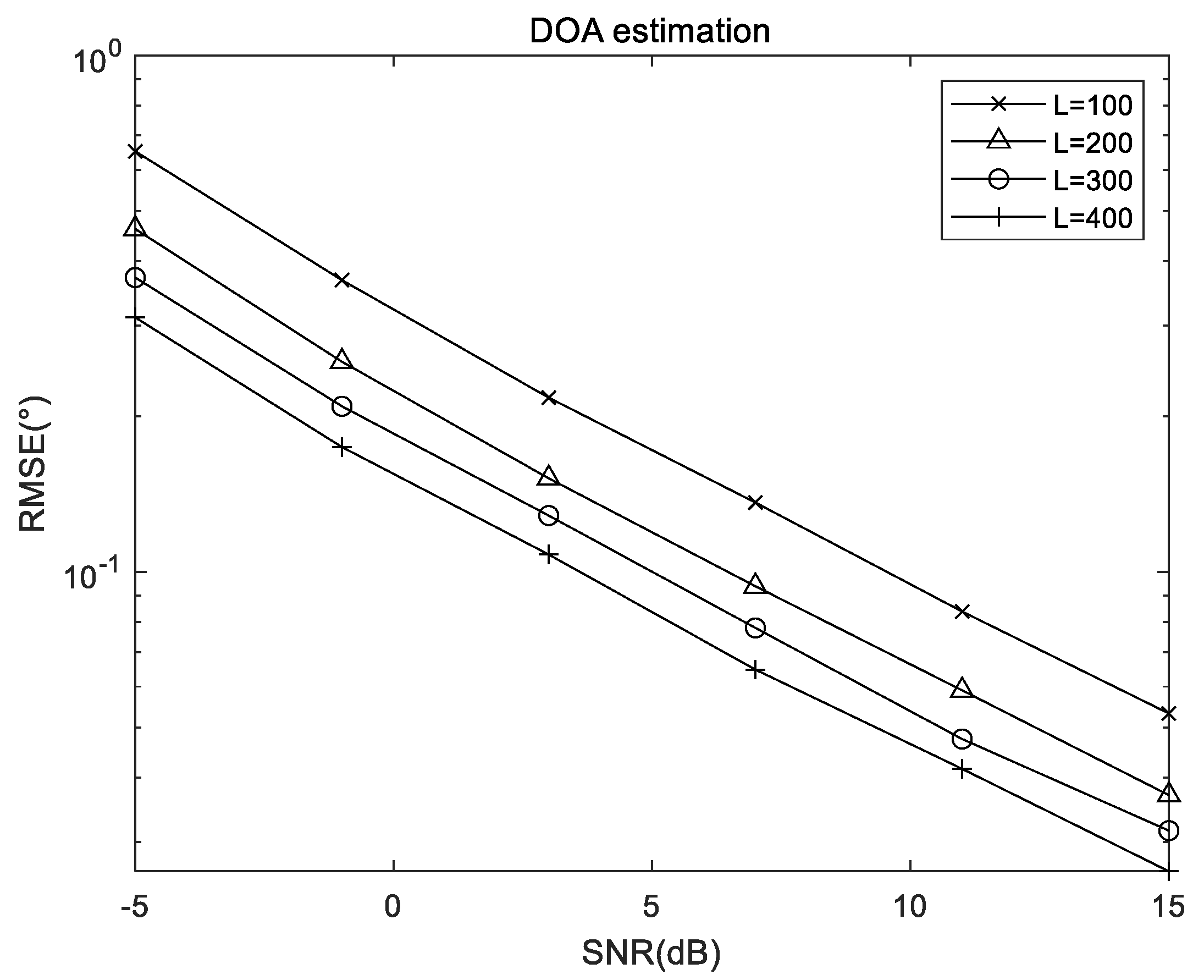
5.2. RMSE Results of the Proposed Algorithm Versus Snapshots
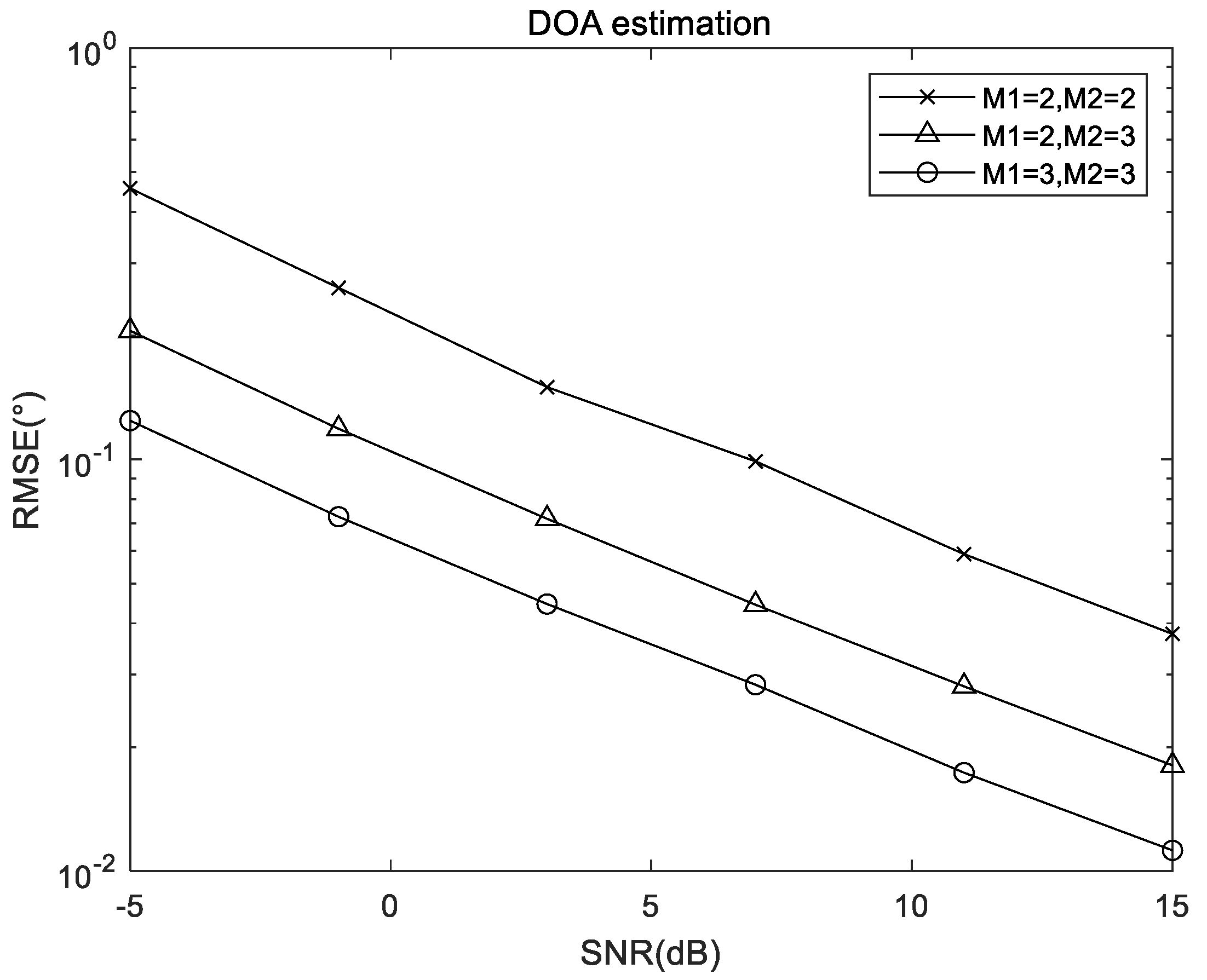
5.3. RMSE Results of the Proposed Algorithm Versus Number of Sensors
5.4. RMSE Comparison of Different Algorithms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Godara, L.C. Applications of antenna arrays to mobile communications. I. Performance improvement, feasibility, and system considerations. Proc. IEEE 1997, 85, 1031–1060. [Google Scholar] [CrossRef]
- Godara, L.C. Application of antenna arrays to mobile communications. II. Beam-forming and direction-of-arrival considerations. Proc. IEEE 1997, 85, 1195–1245. [Google Scholar] [CrossRef] [Green Version]
- Mathews, C.P.; Zoltowski, M.D. Eigen-structure techniques for 2-D angle estimation with uniform circular arrays. IEEE Trans. Signal Process. 1994, 42, 2395–2407. [Google Scholar] [CrossRef]
- Saarnisaari, H. TLS-ESPRIT in a time delay estimation. In Proceedings of the 1997 IEEE 47th Vehicular Technology Conference Technology in Motion, Phoenix, AZ, USA, 4–7 May 1997; Volume 3, pp. 1619–1623. [Google Scholar]
- Xu, G.; Silverstein, S.D.; Roy, R.H.; Kailath, T. Beamspace ESPRIT. IEEE Trans. Signal Process. 1994, 42, 349–356. [Google Scholar] [CrossRef]
- Wax, M.; Shan, T.; Kailath, T. Spatio-temporal spectral analysis by eigen-structure methods. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 817–827. [Google Scholar] [CrossRef]
- Tayem, N.; Kwon, H.M. L-shape 2-dimensional arrival angle estimation with propagator method. IEEE Trans. Antennas Propag. 2005, 53, 1622–1630. [Google Scholar] [CrossRef]
- Hua, Y.; Sarkar, T.K.; Weiner, D.D. An L-shaped array for estimating 2-D directions of wave arrival. IEEE Trans. Antennas Propag. 1991, 39, 143–146. [Google Scholar] [CrossRef] [Green Version]
- Al-Jazzar, S.O.; Mclernon, D.C.; Smadi, M.A. SVD-based joint azimuth/elevation estimation with automatic pairing. Signal Process. 2010, 90, 1669–1675. [Google Scholar] [CrossRef]
- Chen, H.; Hou, C.-P.; Wang, Q.; Huang, L.; Yan, W.-Q. Cumulants-Based Toeplitz Matrices Reconstruction Method for 2-D Coherent DOA Estimation. IEEE Sens. J. 2014, 14, 2824–2832. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, J.; Wu, S. Computationally efficient 2-D doa estimation for uniform rectangular arrays. Multidimens. Syst. Signal Process. 2014, 25, 847–857. [Google Scholar] [CrossRef]
- Chen, Y.M.; Lee, J.H.; Yeh, C.C. Two-dimensional angle-of-arrival estimation for uniform planar arrays with sensor position errors. IEE Proc. Part F Radar Signal Process. 1993, 140, 37–42. [Google Scholar] [CrossRef] [Green Version]
- Heidenreich, P.; Zoubir, A.M.; Rubsamen, M. Joint 2-D DOA Estimation and Phase Calibration for Uniform Rectangular Arrays. IEEE Trans. Signal Process. 2012, 60, 4683–4693. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, F.; Lan, P.; Ding, G.; Zhang, X. Two-Dimensional Direction-of-Arrival Estimation for Co-Prime Planar Arrays: A Partial Spectral Search Approach. IEEE Sens. J. 2016, 16, 5660–5670. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L.; Xu, L.; Xu, D. Direction of Departure (DOD) and Direction of Arrival (DOA) Estimation in MIMO Radar with Reduced-Dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Shi, Z. Two-dimensional direction of arrival estimation for coprime planar arrays via a computationally efficient one-dimensional partial spectral search approach. IET Radar Sonar Navig. 2017, 11, 1581–1588. [Google Scholar]
- Wang, Y.; Chen, J.; Fang, W. TST-MUSIC for joint DOA-delay estimation. IEEE Trans. Signal Process. 2001, 49, 721–729. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Dong, Y.; Dong, C.; Liu, W.; Liu, M.; Tang, Z. Scaling Transform Based Information Geometry Method for DOA Estimation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3640–3650. [Google Scholar] [CrossRef]
- Coutino, M.; Pribic, R.; Leus, G. Direction of arrival estimation based on information geometry. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; pp. 3066–3070. [Google Scholar]
- Hua, X.; Ono, L.; Peng, L.; Xu, Y. Unsupervised Learning Discriminative MIG Detectors in Nonhomogeneous Clutter. IEEE Trans. Commun. 2022, 70, 4107–4120. [Google Scholar] [CrossRef]
- Ye, C.; Zhu, B.; Li, B.; Zhang, X. Computationally Efficient 2D-DOA Estimation for Uniform Planar Arrays: RD-ROOT-MUSIC Algorithm. Trans. Nanjing Univ. Aeronaut. Astronaut. 2021, 38, 685–694. [Google Scholar]
- Vaidyanathan, P.P.; Pal, P. Sparse Sensing with Co-Prime Samplers and Arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Moffet, A. Minimum-redundancy linear arrays. IEEE Trans. Antennas Propag. 1968, 16, 172–175. [Google Scholar] [CrossRef] [Green Version]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the music algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized Coprime Array Configurations for Direction-of-Arrival Estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested Arrays: A Novel Approach to Array Processing with Enhanced Degrees of Freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Hu, G.; Zhang, X.; Sun, F.; Zhou, H. Sparsity-Based Two-Dimensional DOA Estimation for Coprime Array: From Sum–Difference Coarray Viewpoint. IEEE Trans. Signal Process. 2017, 65, 5591–5604. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Zhai, H. Generalized Coprime Planar Array Geometry for 2-D DOA Estimation. IEEE Commun. Lett. 2017, 21, 1075–1078. [Google Scholar] [CrossRef]
- Zheng, W.; Zhang, X.; Xu, L.; Zhou, J. Unfolded Coprime Planar Array for 2D Direction of Arrival Estimation: An Aperture-Augmented Perspective. IEEE Access 2018, 6, 22744–22753. [Google Scholar] [CrossRef]
- Chen, L.; Ye, C.; Li, B. Computationally Efficient Ambiguity-Free Two-Dimensional DOA Estimation Method for Coprime Planar Array: RD-Root-MUSIC Algorithm. Math. Probl. Eng. 2020, 2020, 2794387. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Xu, D. Array Signal Processing and MATLAB Implementation, 2nd ed.; Electronic Industry Press: Beijing, China, 2020; pp. 324–328. [Google Scholar]
- Stoica, P.; Nehorai, A. Performance study of conditional and unconditional direction-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1783–1795. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Computational Complexity |
|---|---|
| Proposed | |
| ESPRIT-NPA | |
| 2D-PSS | |
| RD-ROOT-UPA |
| Algorithm | Achievable DOFs |
|---|---|
| Proposed | |
| 2D-PSS | |
| ESPRIT-NPA | |
| RD-ROOT-UPA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.; Lai, X.; Zhang, Y.; Zhang, X. A Computationally Efficient and Virtualization-Free Two-Dimensional DOA Estimation Method for Nested Planar Array: RD-Root-MUSIC Algorithm. Sensors 2022, 22, 5220. https://doi.org/10.3390/s22145220
Han S, Lai X, Zhang Y, Zhang X. A Computationally Efficient and Virtualization-Free Two-Dimensional DOA Estimation Method for Nested Planar Array: RD-Root-MUSIC Algorithm. Sensors. 2022; 22(14):5220. https://doi.org/10.3390/s22145220
Chicago/Turabian StyleHan, Shengxinlai, Xin Lai, Yu Zhang, and Xiaofei Zhang. 2022. "A Computationally Efficient and Virtualization-Free Two-Dimensional DOA Estimation Method for Nested Planar Array: RD-Root-MUSIC Algorithm" Sensors 22, no. 14: 5220. https://doi.org/10.3390/s22145220
APA StyleHan, S., Lai, X., Zhang, Y., & Zhang, X. (2022). A Computationally Efficient and Virtualization-Free Two-Dimensional DOA Estimation Method for Nested Planar Array: RD-Root-MUSIC Algorithm. Sensors, 22(14), 5220. https://doi.org/10.3390/s22145220