
Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System

 , ,
, ,
Abstract
:1. Introduction
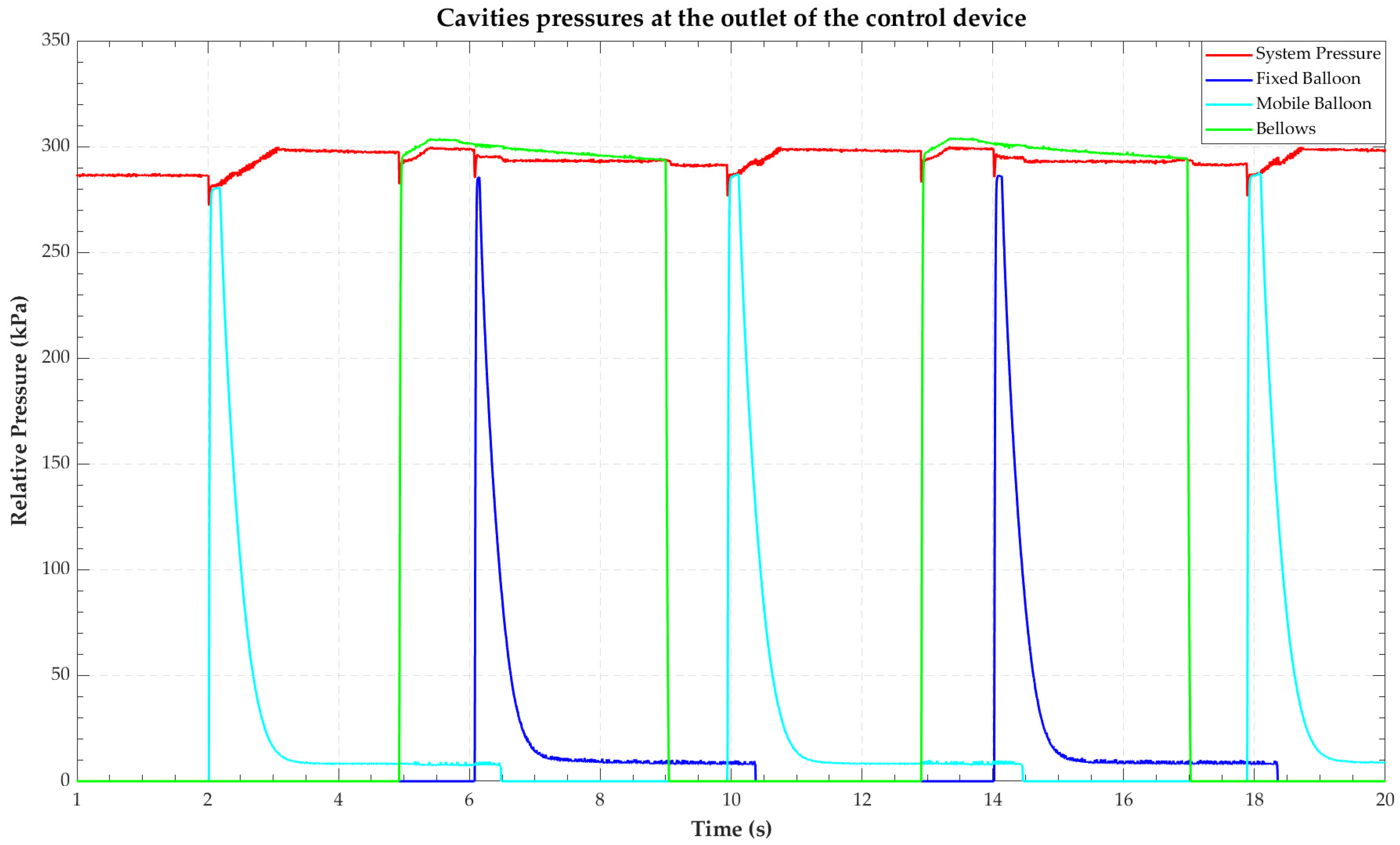
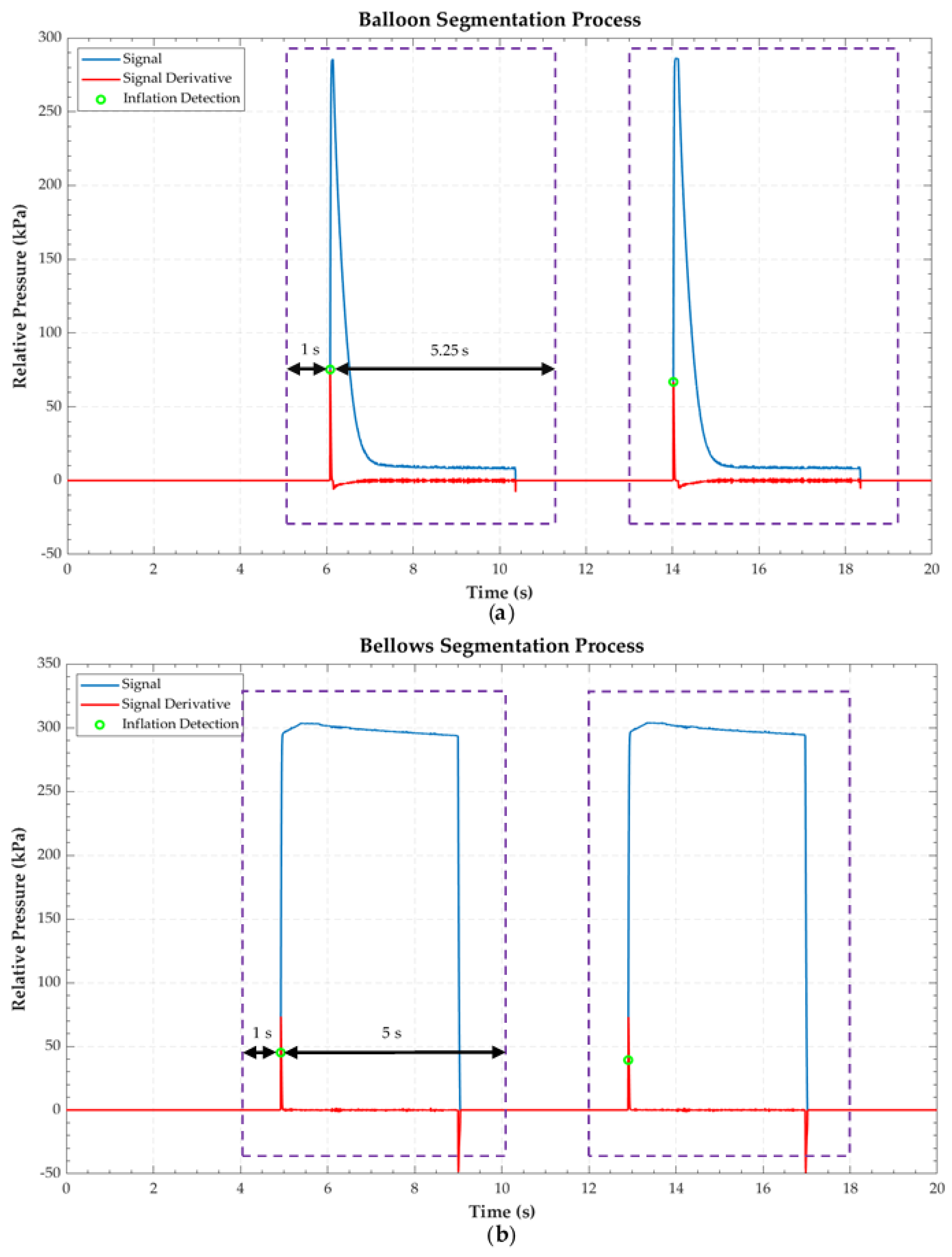
2. Materials and Methods
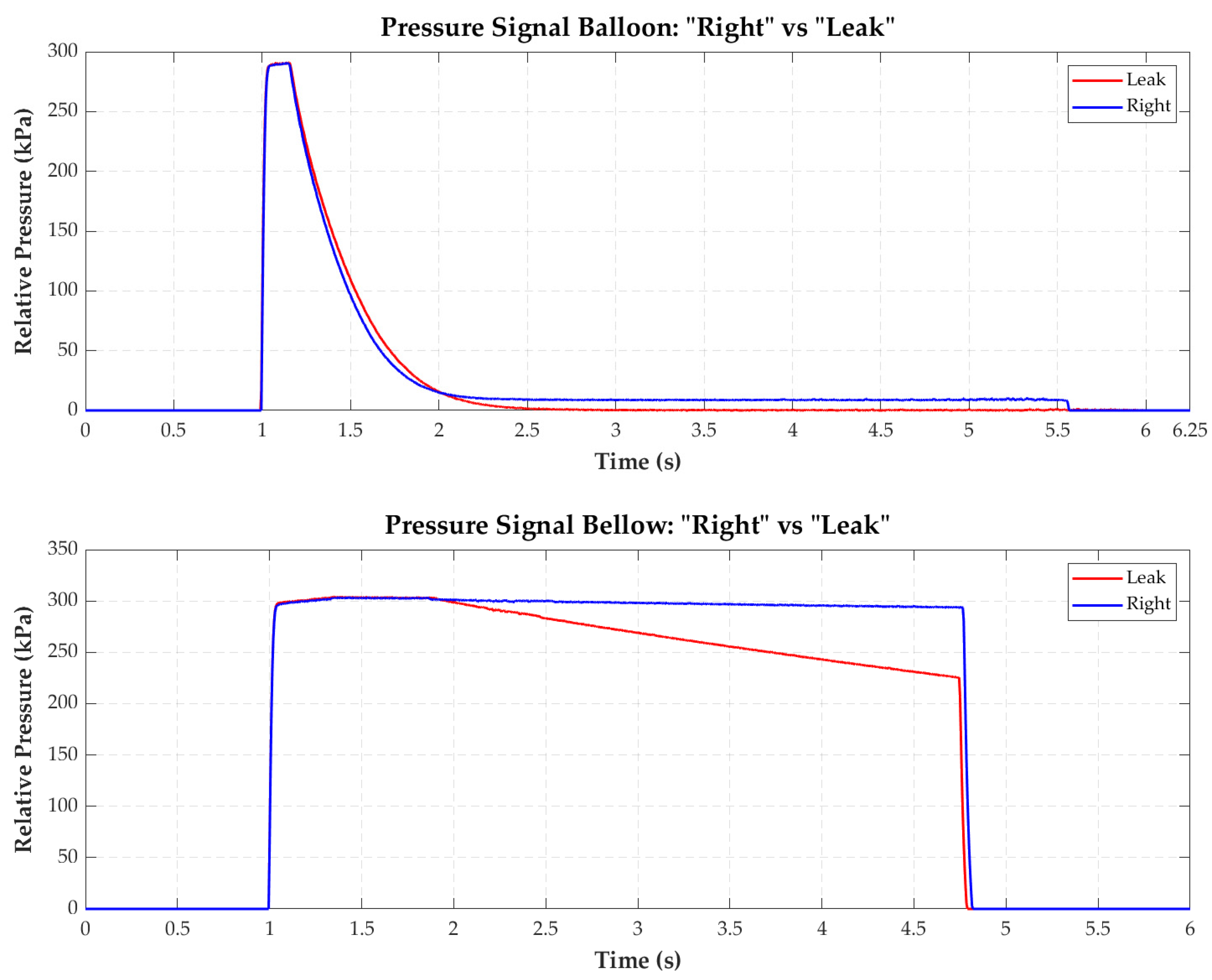
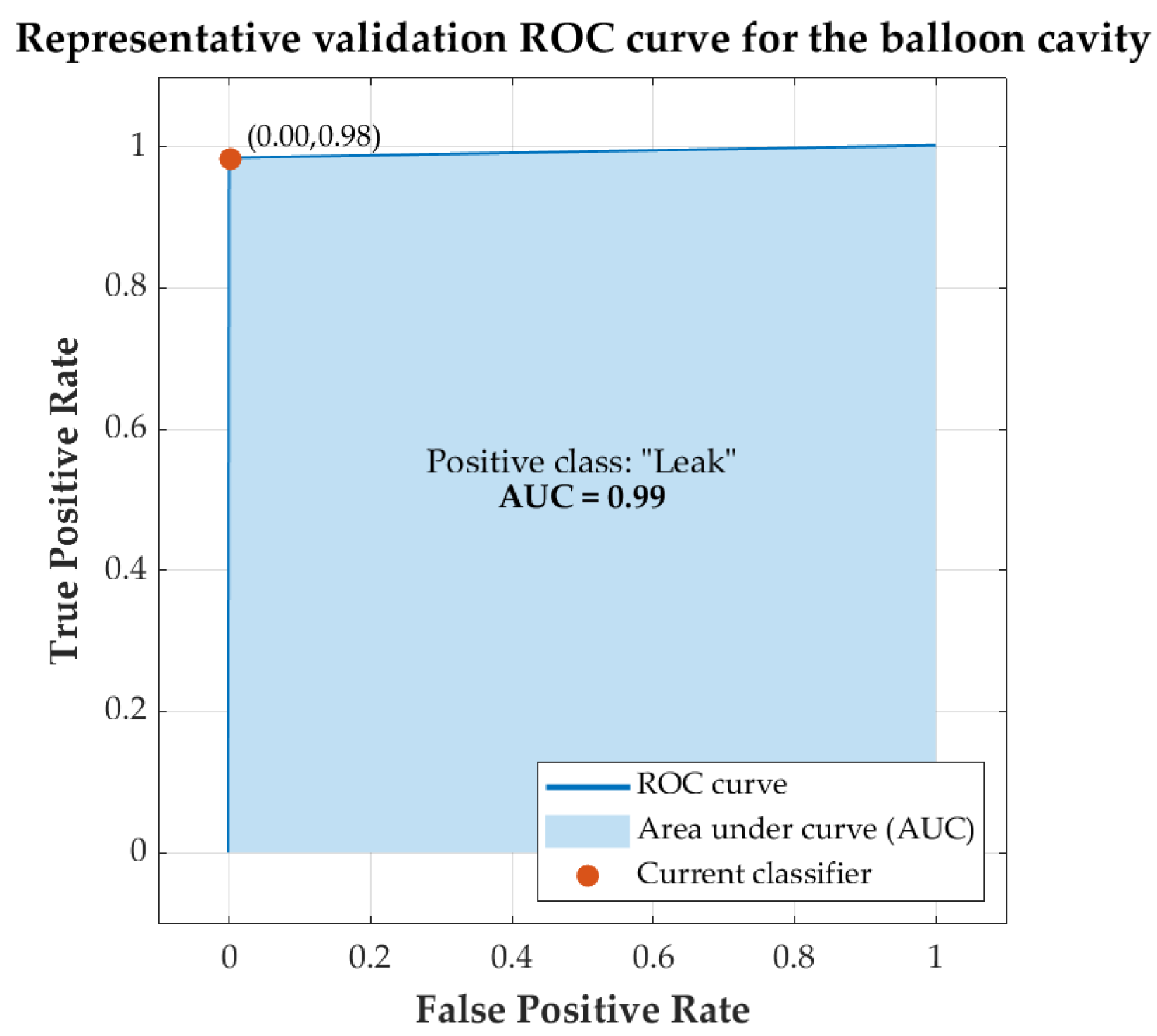
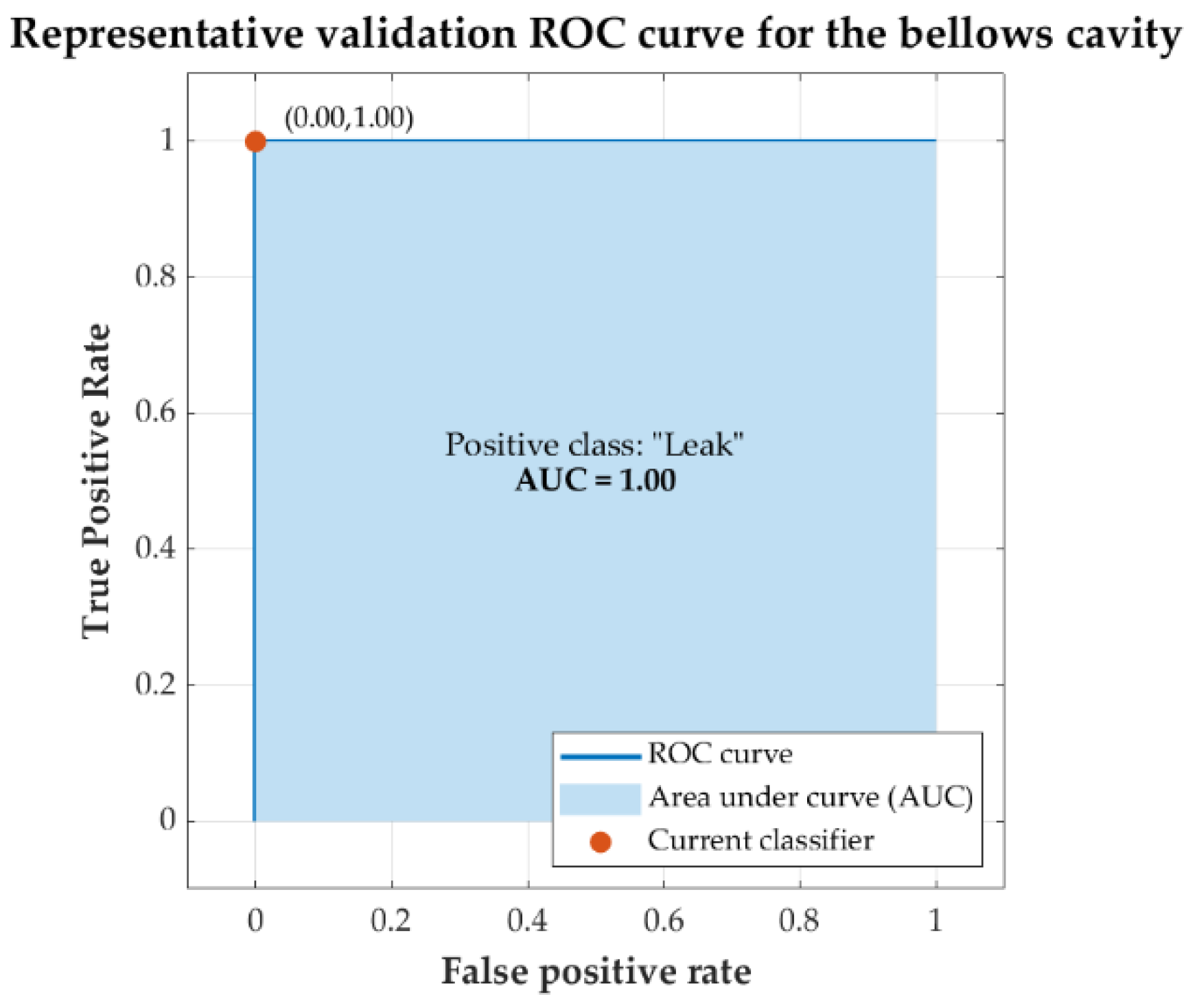
3. Results
3.1. Structure of the Datasets
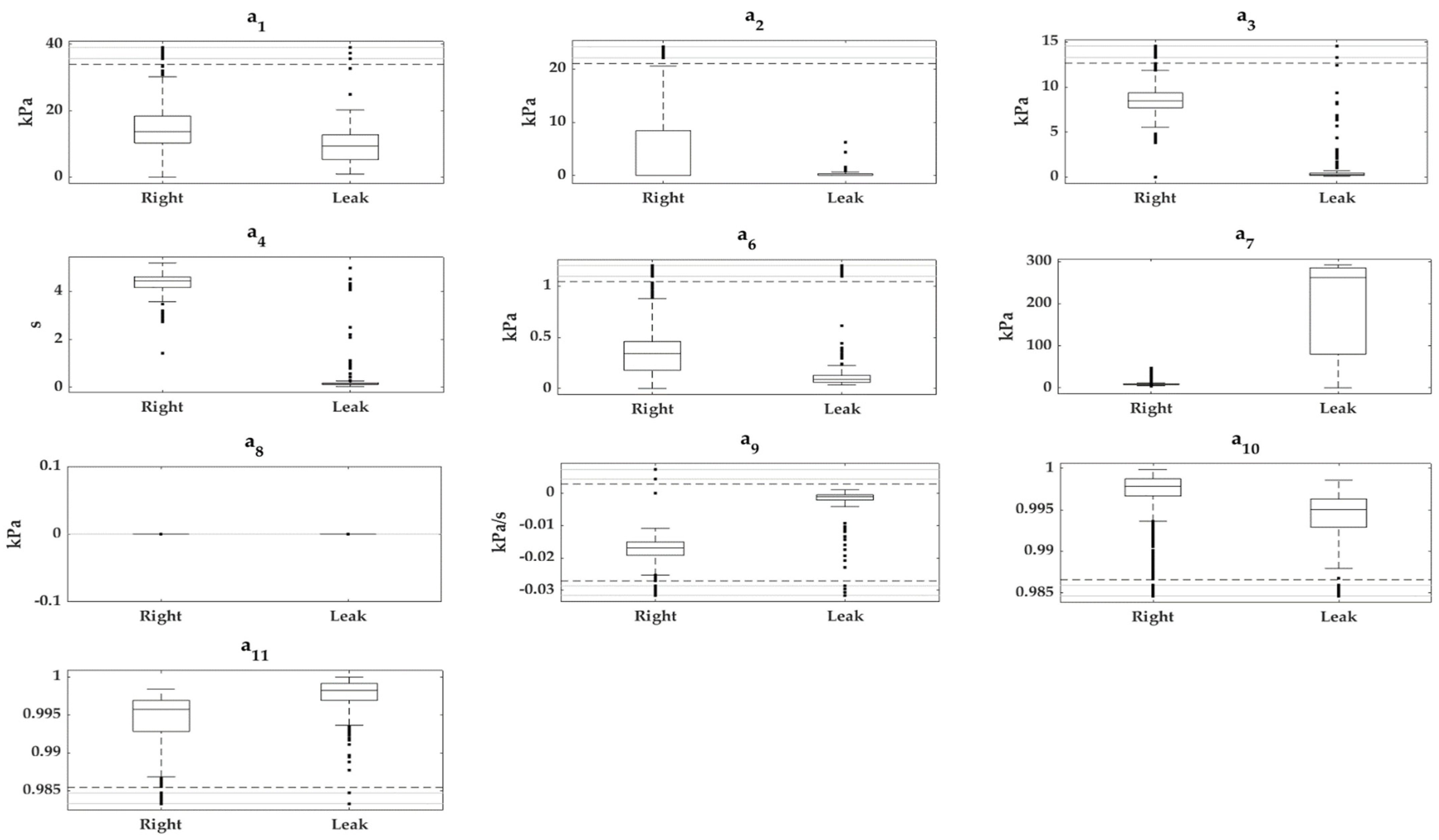
3.2. Preliminary Screening of Features
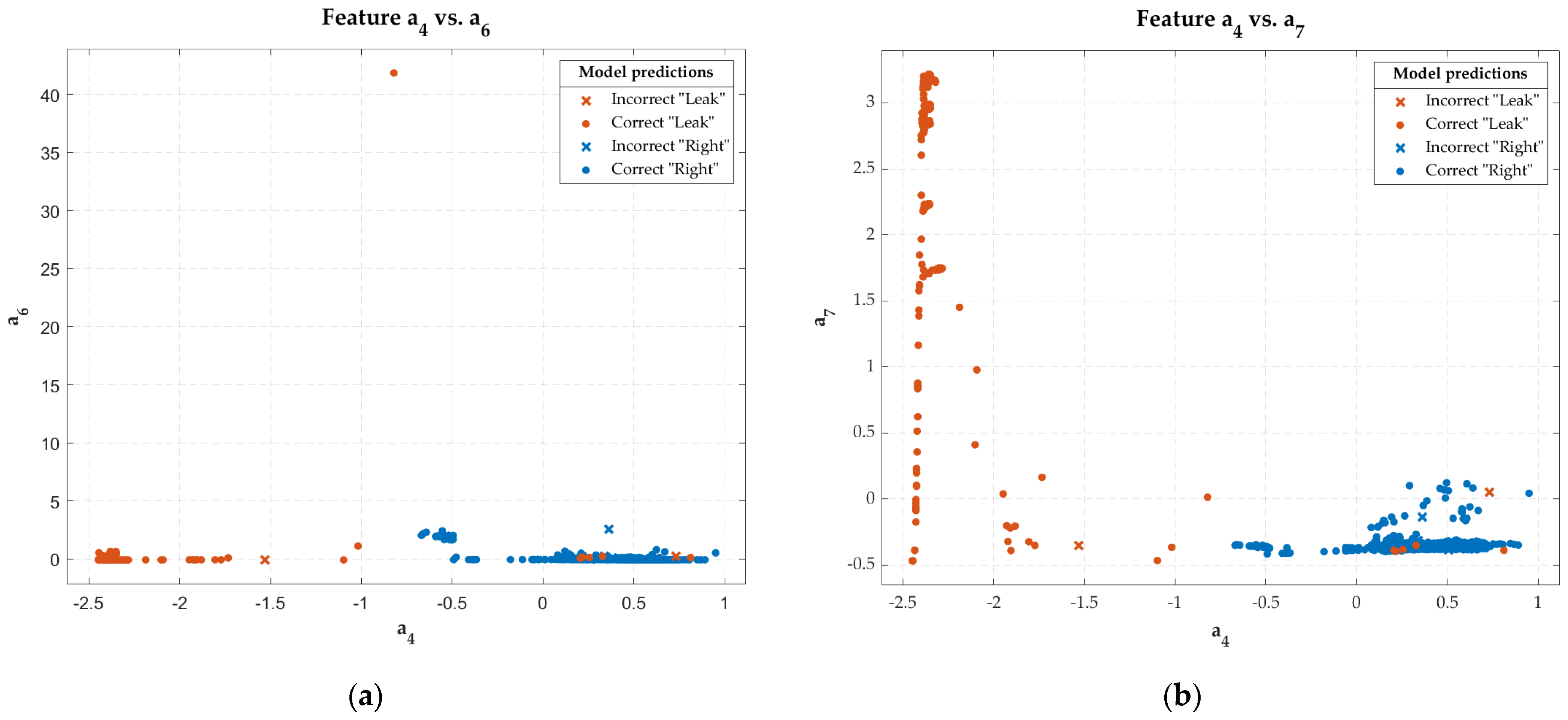
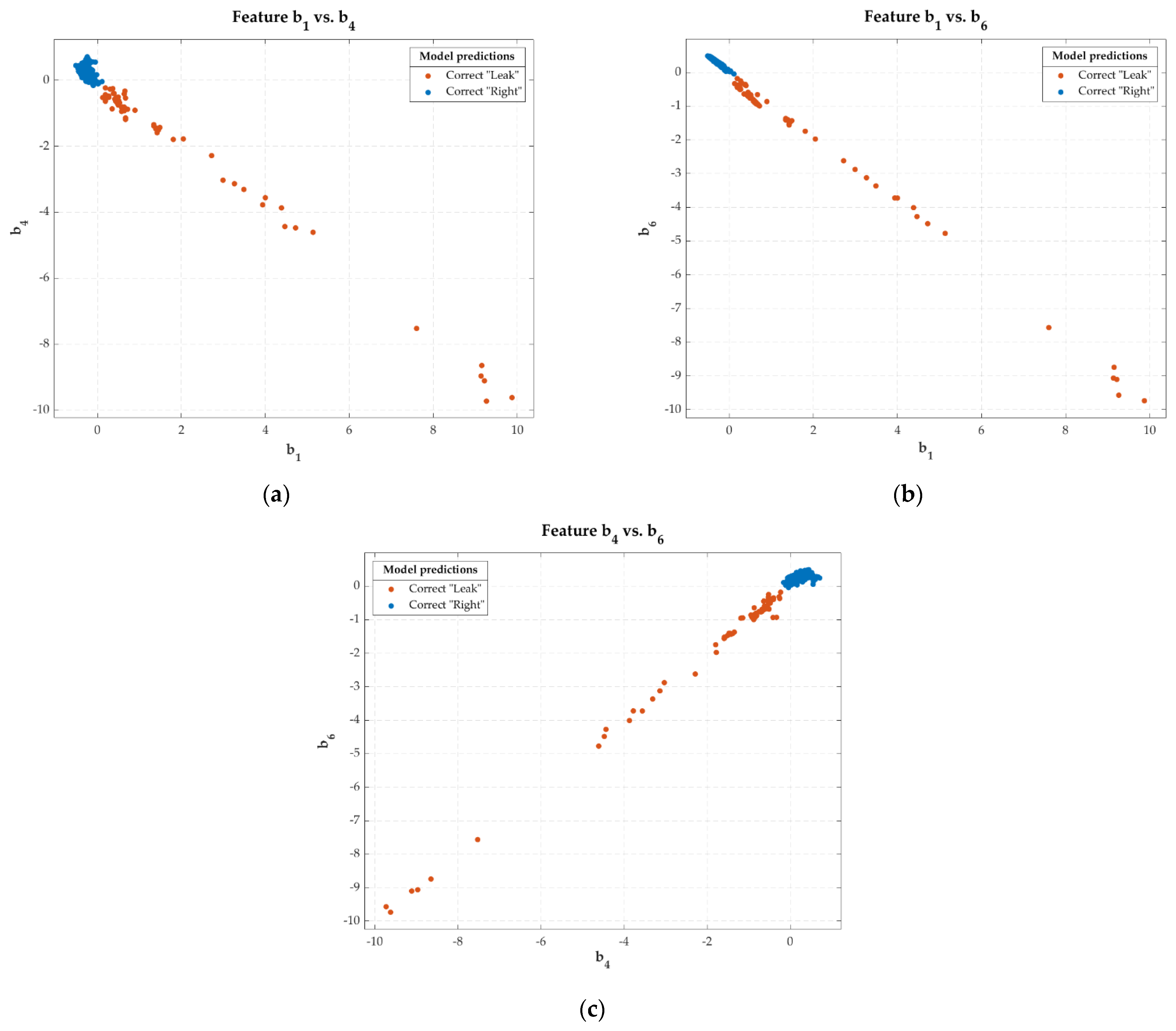
3.3. Feature Selection
3.4. Classification Predictive Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
- Fisher’s score was calculated according to Equation (A1).
- 2.
- ReliefF score was calculated using the default algorithm in Matlab 2022a using the “relieff” function. This algorithm works best for estimating feature importance for distance-based supervised models that use pairwise distances between observations to predict the response. The theoretical development of the calculations made by the algorithm to obtain the feature scores was described in [27].
- 3.
- Chi-square score was calculated using the default algorithm in Matlab 2022a using the “fscchi2” function. This filter examines whether each predictor variable is independent of a response variable using individual chi-square tests, ranking the features using the p-values of the chi-square test statistics. The theoretical development of how the algorithm works to obtain the scores and the ranking was shown in [29].
- 4.
- MRMR score was calculated using the default algorithm in Matlab 2022a using the “fscmrmr” function. The MRMR algorithm is responsible for finding an optimal set of features that are mutually and maximally dissimilar and that can effectively represent the response variable. The algorithm’s goal is to minimize the redundancy of a set of features and maximize the relevance of a set of features to the response variable. The algorithm quantifies redundancy and relevance using the mutual information of the variables (by pairs of features) and mutual information between a feature and the response. The theoretical and mathematical development of the algorithm was shown in [31].
References
- Tsujikawa, T.; Saitoh, Y.; Andoh, A.; Imaeda, H.; Hata, K.; Minematsu, H.; Senoh, K.; Hayafuji, K.; Ogawa, A.; Nakahara, T.; et al. Clinical impact of novel single balloon enteroscopy. J. Gastroenterol. Hepatol. 2007, 22, A226. [Google Scholar]
- Yamamoto, H.; Sekine, Y.; Sato, Y.; Higashizawa, T.; Miyata, T.; Iino, S.; Ido, K.; Sugano, K. Total enteroscopy with a nonsurgical steerable double-balloon method. Gastrointest. Endosc. 2001, 53, 216–220. [Google Scholar] [CrossRef] [PubMed]
- Sunada, K.; Yamamoto, H. Double-balloon endoscopy: Past, present, and future. J. Gastroenterol. 2019, 44, 1–12. [Google Scholar] [CrossRef]
- Akerman, P.A.; Haniff, M. Spiral enteroscopy: Prime time or for the happy few? Best Pract. Res. Clin. Gastroenterol. 2012, 26, 293–301. [Google Scholar] [CrossRef]
- Lenz, P.; Domagk, D. Double- vs. single-balloon vs. spiral enteroscopy. Best Pract. Res. Clin. Gastroenterol. 2012, 26, 303–313. [Google Scholar] [CrossRef] [PubMed]
- Wadhwa, V.; Sethi, S.; Tewani, S.; Garg, S.K.; Pleskow, D.K.; Chuttani, R.; Berzin, T.M.; Sethi, N.; Sawhney, M.S. A meta-analysis on efficacy and safety: Single-balloon vs. double-balloon enteroscopy. Gastroenterol. Rep. 2015, 3, 148–155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- May, A.; Manner, H.; Aschmoneit, I.; Ell, C. Prospective, cross-over, single-center trial comparing oral double-balloon enteroscopy and oral spiral enteroscopy in patients with suspected small-bowel vascular malformations. Endoscopy 2011, 43, 477–483. [Google Scholar] [CrossRef]
- Kim, T.J.; Kim, E.R.; Chang, D.K.; Kim, Y.H.; Hong, S.N. Comparison of the efficacy and safety of single-versus double-balloon enteroscopy performed by endoscopist experts in single-balloon enteroscopy: A single-center experience and meta-analysis. Gut Liver 2017, 11, 520–527. [Google Scholar] [CrossRef] [Green Version]
- Nehme, F.; Goyal, H.; Perisetti, A.; Tharian, B.; Sharma, N.; Tham, T.C.; Chhabra, R. The Evolution of Device-Assisted Enteroscopy: From Sonde Enteroscopy to Motorized Spiral Enteroscopy. Front. Med. 2021, 8, 792668. [Google Scholar] [CrossRef]
- Qi, Q.; Teng, Y.; Li, X. Design and characteristic study of a pneumatically actuated earthworm-like soft robot. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 5–7 August 2015; pp. 435–439. [Google Scholar] [CrossRef]
- Dewapura, J.I.; Hemachandra, P.S.; Dananjaya, T.; Awantha, W.V.I.; Wanasinghe, A.T.; Kulasekera, A.L.; Chathuranga, D.S.; Dassanayake, V.P.C. Design and development of a novel bio-inspired worm-type soft robot for in-pipe locomotion. In Proceedings of the 2020 20th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2020; pp. 586–591. [Google Scholar] [CrossRef]
- Calisti, M.; Picardi, G.; Laschi, C. Fundamentals of soft robot locomotion. J. R. Soc. Interface 2017, 14, 20170101. [Google Scholar] [CrossRef] [Green Version]
- Tang, Z.; Lu, J.; Wang, Z.; Ma, G.; Chen, W.; Feng, H. Development of a New Multi-cavity Pneumatic-driven Earthworm-like Soft Robot. Robotica 2020, 38, 2290–2304. [Google Scholar] [CrossRef]
- Tobella, J.; Pons-Beltrán, V.; Santonja, A.; Sánchez, C.; Campillo-Fernández, A.J.; Vidaurre, A. Analysis of the ‘Endoworm’ prototype’s ability to grip the bowel in in vitro and ex vivo models. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2020, 234, 468–477. [Google Scholar] [CrossRef] [PubMed]
- Sánchez-Diaz, C.; Senent-Cardona, E.; Pons-Beltran, V.; Santonja-Gimeno, A.; Vidaurre, A. Endoworm: A new semi-autonomous enteroscopy device. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2018, 232, 1137–1143. [Google Scholar] [CrossRef] [PubMed]
- Gerson, L.B.; Flodin, J.T.; Miyabayashi, K. Balloon-assisted enteroscopy: Technology and troubleshooting. Gastrointest. Endosc. 2008, 68, 1158–1167. [Google Scholar] [CrossRef] [PubMed]
- Waleed, D.; Mustafa, S.H.; Mukhopadhyay, S.; Abdel-Hafez, M.F.; Jaradat, M.A.K.; Dias, K.R.; Arif, F.; Ahmed, J.I. An In-Pipe Leak Detection Robot with a Neural-Network-Based Leak Verification System. IEEE Sens. J. 2019, 19, 1153–1165. [Google Scholar] [CrossRef]
- da Cruz, R.P.; da Silva, F.V.; Fileti, A.M.F. Machine learning and acoustic method applied to leak detection and location in low-pressure gas pipelines. Clean Technol. Environ. Policy 2020, 22, 627–638. [Google Scholar] [CrossRef]
- Kosturkov, R.; Nachev, V.; Titova, T. Diagnosis of Pneumatic Systems on Basis of Time Series and Generalized Featurefor Comparison with Standards for Normal Working Condition. TEM J. 2021, 10, 183–191. [Google Scholar] [CrossRef]
- Geiger, G. State-of-the-art in leak detection and localization. Oil Gas-European Mag. 2006, 122, 193–198. [Google Scholar]
- Wu, C.-T.; Li, G.-H.; Huang, C.-T.; Cheng, Y.-C.; Chen, C.-H.; Chien, J.-Y.; Kuo, P.-H.; Kuo, L.-C.; Lai, F. Acute exacerbation of a chronic obstructive pulmonary disease prediction system using wearable device data, machine learning, and deep learning: Development and cohort study. JMIR mHealth uHealth 2021, 9, e22591. [Google Scholar] [CrossRef]
- Lee, E.A.; Seshia, S.A. Introduction to Embedded Systems. A Cyber-Physical Systems Approach, 2nd ed.; MIT Press: Cambridge, MA, USA, 2017; Volume 215. [Google Scholar]
- Jain, A.; Nandakumar, K.; Ross, A. Score normalization in multimodal biometric systems. Pattern Recognit 2005, 38, 2270–2285. [Google Scholar] [CrossRef]
- Haga, A.; Takahashi, W.; Aoki, S.; Nawa, K.; Yamashita, H.; Abe, O.; Nakagawa, K. Standardization of imaging features for radiomics analysis. J. Med. Investig. 2019, 66, 35–37. [Google Scholar] [CrossRef] [PubMed]
- Mahanta, M.S.; Plataniotis, K.N. Ranking 2DLDA features based on Fisher Discriminance. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 8307–8311. [Google Scholar] [CrossRef]
- Gan, M.; Zhang, L. Iteratively local fisher score for feature selection. Appl. Intell. 2021, 51, 6167–6181. [Google Scholar] [CrossRef]
- Robnik-Sikonja, M.; Kononenko, I. Theoretical and Empirical Analysis of ReliefF and RReliefF. Mach. Learn. 2003, 53, 23–69. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zhang, Y.; Chen, Z.; Yang, H.; Sun, Y.; Kang, J.; Yang, Y.; Liang, X. Application of ReliefF algorithm to selecting feature sets for classification of high resolution remote sensing image. Int. Geosci. Remote Sens. Symp. 2016, 2016, 755–758. [Google Scholar] [CrossRef]
- Liu, H.; Setiono, R. Chi2: Feature selection and discretization of numeric attributes. In Proceedings of the 7th IEEE International Conference on Tools with Artificial Intelligence, Herndon, VA, USA, 5–8 November 1995; pp. 388–391. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, L.; Qin, N.; Zhang, M.; Lv, Q. Analog filter circuits feature selection using MRMR and SVM. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Korea, 22–25 October 2014; pp. 1543–1547. [Google Scholar] [CrossRef]
- Ding, C.; Peng, H. Minimum redundancy feature selection from microarray gene expression data. In Proceedings of the 2003 IEEE Bioinformatics Conference, CSB2003, Stanford, CA, USA, 11–14 August 2003; pp. 523–528. [Google Scholar] [CrossRef]
- Rodríguez, J.D.; Pérez, A.; Lozano, J.A. Sensitivity Analysis of k-Fold Cross Validation in Prediction Error Estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 569–575. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E.; Hall, M.A. Data Mining. Practical Machine Learning Tools and Techniques, 3rd ed.; Elsevier: Burlington, MA, USA, 2008. [Google Scholar]
- Kohavi, R.; John, G.H. Wrappers for feature subset selection. Artif. Intell. 1997, 97, 273–324. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.J. Building a cardiovascular disease prediction model for smartwatch users using machine learning: Based on the Korea national health and nutrition examination survey. Biosensors 2021, 11, 228. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Subset | Class | N | Percentage |
|---|---|---|---|
| Cross- Validation | Right | 1593 | 84.73 |
| Leak | 287 | 15.27 | |
| Test | Right | 387 | 82.34 |
| Leak | 83 | 17.66 | |
| Total | Right | 1980 | 84.26 |
| Leak | 370 | 15.74 |
| Data Subset | Class | N | Percentage |
|---|---|---|---|
| Cross- Validation | Right | 637 | 86.20 |
| Leak | 102 | 13.80 | |
| Test | Right | 151 | 81.62 |
| Leak | 34 | 18.38 | |
| Total | Right | 788 | 85.28 |
| Leak | 136 | 14.72 |
| Features | Scores | Ranking | |||
|---|---|---|---|---|---|
| Fisher’s | ReliefF | Chi2 | MRMR | Total | |
| a1 | 0.218 | 0.123 | 114.2 | 1.5 × 10−14 | 10 |
| a2 | 0.386 | 0.000 | 160.3 | 2.9 × 10−14 | 11 |
| a3 | 2.610 | 0.049 | 708.1 | 2.8 × 10−14 | 5 |
| a4 | 15.824 | 0.073 | 711.9 | 3.9 × 10−1 | 1 |
| a5 | 12.875 | 0.000 | 65,535.0 | 9.5 × 10−14 | 2 or 3 |
| a6 | 0.002 | 0.054 | 576.7 | 5.9 × 10−14 | 8 |
| a7 | 2.032 | 0.017 | 630.8 | 1.1 × 10−13 | 4 |
| a8 | 0.004 | −0.001 | 13.3 | 7.6 × 10−14 | 12 |
| a9 | 1.644 | 0.050 | 684.8 | 9.8 × 10−14 | 2 or 3 |
| a10 | 0.051 | 0.058 | 191.3 | 3.9 × 10−14 | 9 |
| a11 | 0.239 | 0.033 | 347.0 | 3.3 × 10−1 | 6 |
| a12 | 2.766 | 0.000 | 457.1 | 8.0 × 10−14 | 7 |
| Features | Scores | Ranking | |||
|---|---|---|---|---|---|
| Fisher’s | ReliefF | Chi2 | MRMR | Total | |
| b1 | 0.442 | 0.043 | 278.627 | 0.098 | 5 |
| b2 | 0.017 | 0.000 | 2.338 | 0.002 | 12 |
| b3 | 0.433 | 0.010 | 99.692 | 0.099 | 9 |
| b4 | 0.570 | 0.034 | 278.873 | 0.199 | 2 or 3 |
| b5 | 0.000 | 0.000 | 0.000 | 0.000 | 13 |
| b6 | 0.579 | 0.042 | 278.873 | 0.131 | 2 or 3 |
| b7 | 0.283 | −0.017 | 38.996 | 0.061 | 11 |
| b8 | 0.127 | 0.004 | 278.566 | 0.387 | 6 or 7 |
| b9 | 3.009 | 0.009 | 218.732 | 0.061 | 6 or 7 |
| b10 | 1.380 | 0.019 | 211.381 | 0.332 | 4 |
| b11 | 4.779 | 0.019 | 266.701 | 0.259 | 1 |
| b12 | 0.010 | 0.007 | 40.772 | 0.008 | 10 |
| b13 | 1.751 | 0.000 | 114.625 | 0.128 | 8 |
| Algoritm | Features | 5-Fold Cross-Validation | Test | Total | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Acc. | Recall | Pre. | F1-Sc. | Acc. | Recall | Pre. | F1-Sc. | Acc. | Recall | Pre. | F1-Sc. | ||
| Medium tree | a4, a6, a7 | 99.63 | 98.26 | 99.30 | 98.77 | 99.57 | 97.59 | 100 | 98.78 | 99.62 | 98.11 | 99.45 | 98.78 |
| a3–a7, a9, a11, a12 | 99.63 | 98.26 | 99.30 | 98.77 | 99.57 | 97.59 | 100 | 98.78 | 99.62 | 98.11 | 99.45 | 98.78 | |
| a4, a6 | 99.36 | 97.91 | 97.91 | 97.91 | 99.79 | 98.80 | 100 | 99.39 | 99.45 | 98.11 | 98.37 | 98.24 | |
| Bilayered neural network | a3–a7, a9, a11, a12 | 99.41 | 97.21 | 98.94 | 98.07 | 99.57 | 97.59 | 100 | 98.78 | 99.45 | 97.30 | 99.17 | 98.23 |
| Narrow neural network | a4, a6, a7, a9 | 99.36 | 97.21 | 98.59 | 97.89 | 99.79 | 98.80 | 100 | 99.39 | 99.45 | 97.57 | 98.90 | 98.23 |
| Quadratic SVM | a4–a7 | 99.36 | 96.17 | 99.64 | 97.87 | 99.57 | 97.59 | 100 | 98.78 | 99.40 | 96.49 | 99.72 | 98.08 |
| Medium neural network | a4–a7 | 99.36 | 98.26 | 97.58 | 97.92 | 99.36 | 96.39 | 100 | 98.16 | 99.36 | 97.84 | 98.10 | 97.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zazo-Manzaneque, R.; Pons-Beltrán, V.; Vidaurre, A.; Santonja, A.; Sánchez-Díaz, C. Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System. Sensors 2022, 22, 5211. https://doi.org/10.3390/s22145211
Zazo-Manzaneque R, Pons-Beltrán V, Vidaurre A, Santonja A, Sánchez-Díaz C. Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System. Sensors. 2022; 22(14):5211. https://doi.org/10.3390/s22145211
Chicago/Turabian StyleZazo-Manzaneque, Roberto, Vicente Pons-Beltrán, Ana Vidaurre, Alberto Santonja, and Carlos Sánchez-Díaz. 2022. "Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System" Sensors 22, no. 14: 5211. https://doi.org/10.3390/s22145211
APA StyleZazo-Manzaneque, R., Pons-Beltrán, V., Vidaurre, A., Santonja, A., & Sánchez-Díaz, C. (2022). Classification Predictive Model for Air Leak Detection in Endoworm Enteroscopy System. Sensors, 22(14), 5211. https://doi.org/10.3390/s22145211