
An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Detects and identifies obstacles by integrating a machine learning model within the framework.
- Generates timely alerts for the cane user and guardian.
- Provides the guardian with access to a mobile application to keep them aware of the position and status of the visually impaired user for a safe navigation.
2. Related Work
- Detect any obstacle within a predefined distance.
- Classify the obstacles using machine learning, as some obstacles the users may not want to avoid, such as stairs and doors.
- Incorporate a mobile application to allow real-time tracking of the cane user while on the move and alert the user and the guardian in case the cane falls or when help is needed.
3. Methodology
3.1. Hardware Architecture of the Proposed System
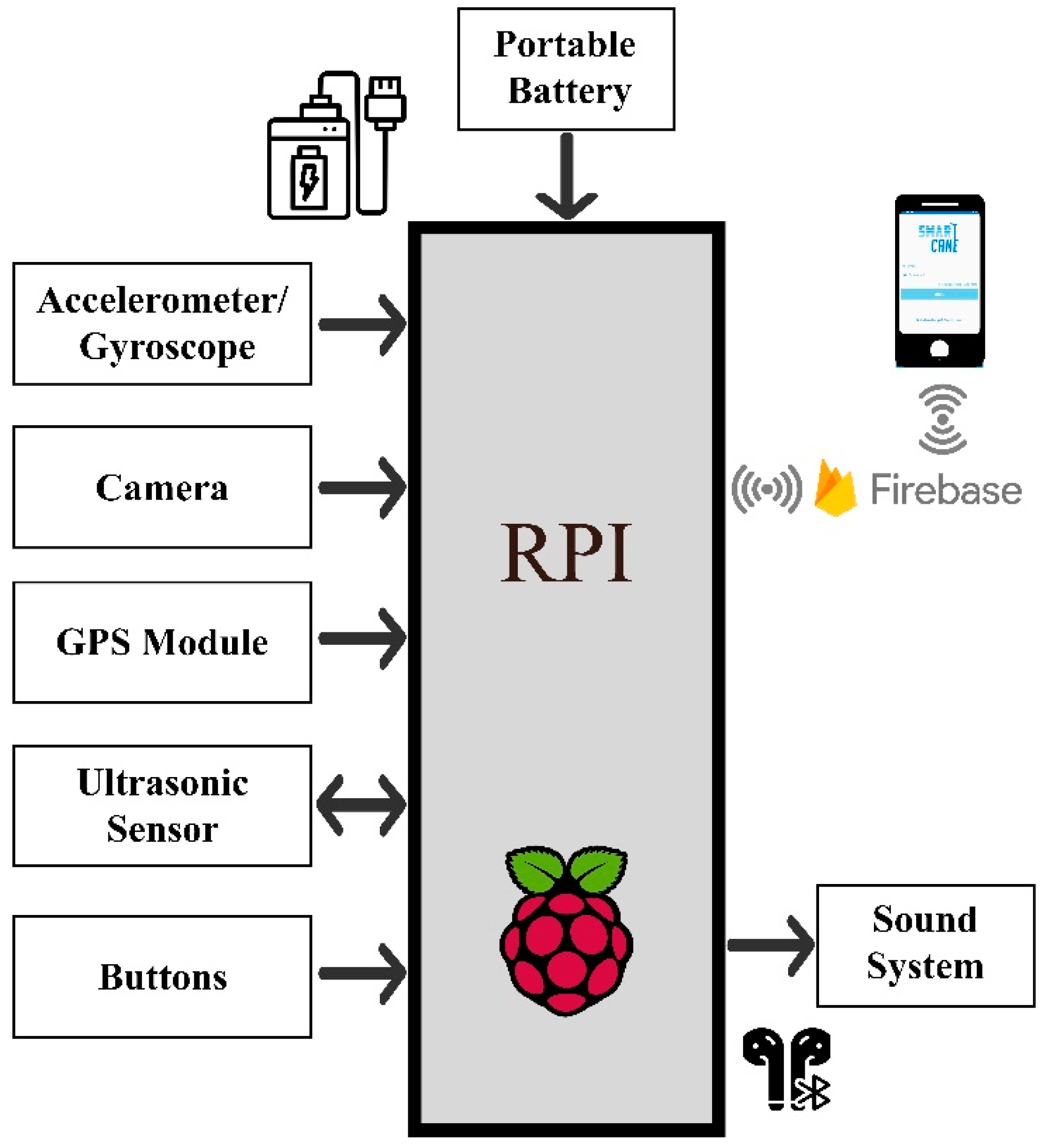
3.1.1. Edge Computing Unit
3.1.2. Sensing and Navigation Unit
- Accelerometer/gyroscope (MPU6050): This is used to measure the acceleration and rotation in 3D space. Furthermore, it has an onboard digital motion processor. It can be interfaced to the edge computing device using SPI and I2C communication protocols; the latter was used in the system. The acceleration and rotation sensitivities and resolution are programmable and can be set from 0 to 32,750 units. According to the datasheet, to convert this in terms of degree/sec and g force, the sensitivities are shown in Table 3. Each of these sensors can have four different sensitivities and can be programmed using the FSYNC register. In this work, the most sensitive angular velocity range is 250°/s, and this leads to 131 units/degree resolution. As for the accelerometer, the most sensitive acceleration range is 2 g, and this leads to 16,384 units/g resolution [32].
- Cameras: Two high-quality 8-megapixel resolution cameras are used to capture the surrounding area. One of the cameras is interfaced using the built-in serial camera interface, whereas the other utilizes one of the USB ports of the edge computing device.
- GPS Module: The Vk-162 G-Mouse GPS device is used to track the location of the user. It is interfaced with the edge computing device via one of the USB ports of the edge computing device.
- Ultrasonic (US) Sensors: These sensors are HC-SR04, and they are used to measure the distance between the cane and the surrounding obstacles with a range of 2 cm to 400 cm and with an accuracy of 3 mm. The trigger and echo pins of the sensor are interfaced with the GPIO pins of the edge computing device.
- Sound System: A notification alarm is generated to inform the cane user of the obstacles ahead.
- Push buttons: Three push buttons are used. The first is a power button that is used to power the system. The second is an emergency button used to call for an emergency. The third is an “I am Fine” button, which is used to cancel a false fall alarm.
3.1.3. Mobile Unit
3.2. Software Architecture of the Proposed System
3.2.1. Data Processing Layer (DPL)
- Sensor Data Acquisition Sub-Layer
- -
- The distance to the obstacles is calculated using the time interval (t) between sending the sensor trigger signal and receiving that signal by the sensor using the following formula: t/58 = 1 cm.
- -
- The data from the accelerometer/gyro are processed and converted into g force units and rotation in degrees/second, respectively.
- -
- The data from the GPS is processed by extracting the latitude, longitude and time from the raw GPS data.
- -
- The images from the cameras are collected and stored on the RPi for processing and analyzing.
- Machine Learning Sub-Layer
- -
- Datasets:
- -
- Feature Extraction:
- -
- Machine Learning Methods:
- The Decision Tree Classifier is a tree-structured classifier, where internal nodes represent the features of a dataset, branches represent the decision rules and each leaf node represents the outcome. There are many algorithms used in building decision trees, such as Iterative Dichotomiser 3 (ID3), C4.5—a successor of ID3, and Classification And Regression Trees (CART) [37,38]. The ID3-based algorithms build decision trees using a top-down greedy search approach. A greedy algorithm, as the name suggests, always makes the choice that seems to be the best at that moment. Using these algorithms, decision trees are built as follows. The original dataset of samples is used as the root node. At each iteration of the algorithm, it iterates through the unused features and calculates impurity and information gain (IG). It then selects the feature that minimizes the impurity or maximizes the information gain. After the set of samples is split by the selected feature, the algorithm continues to recur on each subset, considering only features never selected before, until the subsets are pure or a stopping criterion is met. Impurity can be measured using entropy criteria, as follows:where p(ci) is the probability/percentage of class ci in a node.
- Naïve Bayes classifier is a classification model that is based on Bayes’ theorem, with the “naïve” assumption of conditional independence between every pair of features given the value of the class variable. Bayes’ theorem states the following relationship given class variable y and dependent feature vector x1 through xn [39]:
- k-nearest neighbor (k-NN) is a non-parametric classification method in which a sample is classified by a majority vote of its neighbors, with the sample being assigned to the class most common among its k nearest neighbors (k is a positive integer, typically small) [40]. If k = 1, then the object is simply assigned to the class of that single nearest neighbor. Distance between the samples is measured using appropriate distance measures. Equation (8) denotes the Euclidean distance between two samples p and q:where N is the number of features in the dataset. In this work, k = 96 was selected through experimentation because it was found to yield the best performance.
- Support Vector Machine (SVM) is a powerful classification method that builds a model that maps training samples to points in space such that the width of the gap between the different classes is maximized [41]. Using this model, new samples are then predicted to belong to a class based on which side of the gap they fall. A decision hyperplane, which separates the classes, can be defined by an intercept term b and a decision hyperplane normal vector , which is perpendicular to the hyperplane. This vector is commonly referred to in the machine learning literature as the weight vector.
3.2.2. Data Storage Layer (DSL)
3.2.3. Application Layer (AL)
- While the visually impaired person is on the move, the sensor data acquisition unit detects obstacles, captures images, and classifies them using the proposed supervised machine learning algorithm. The cane then alerts the visually impaired individual accordingly.
- When a fall is encountered and the “I am Fine” button is not pressed, the cane sends an alarm to the guardian through the cloud database. A notification message is sent to the guardian to act accordingly.
- Once the guardian receives an alert/notification message from the visually impaired individual through the database, he/she can access the database to find out the status and whereabouts of the visually impaired individual via Google Maps.
4. System Implementation and Testing
4.1. Obstacle Detection
- Distance (Ultrasonic Sensors)
- Image Capturing (Cameras)
4.2. Obstacle Classification
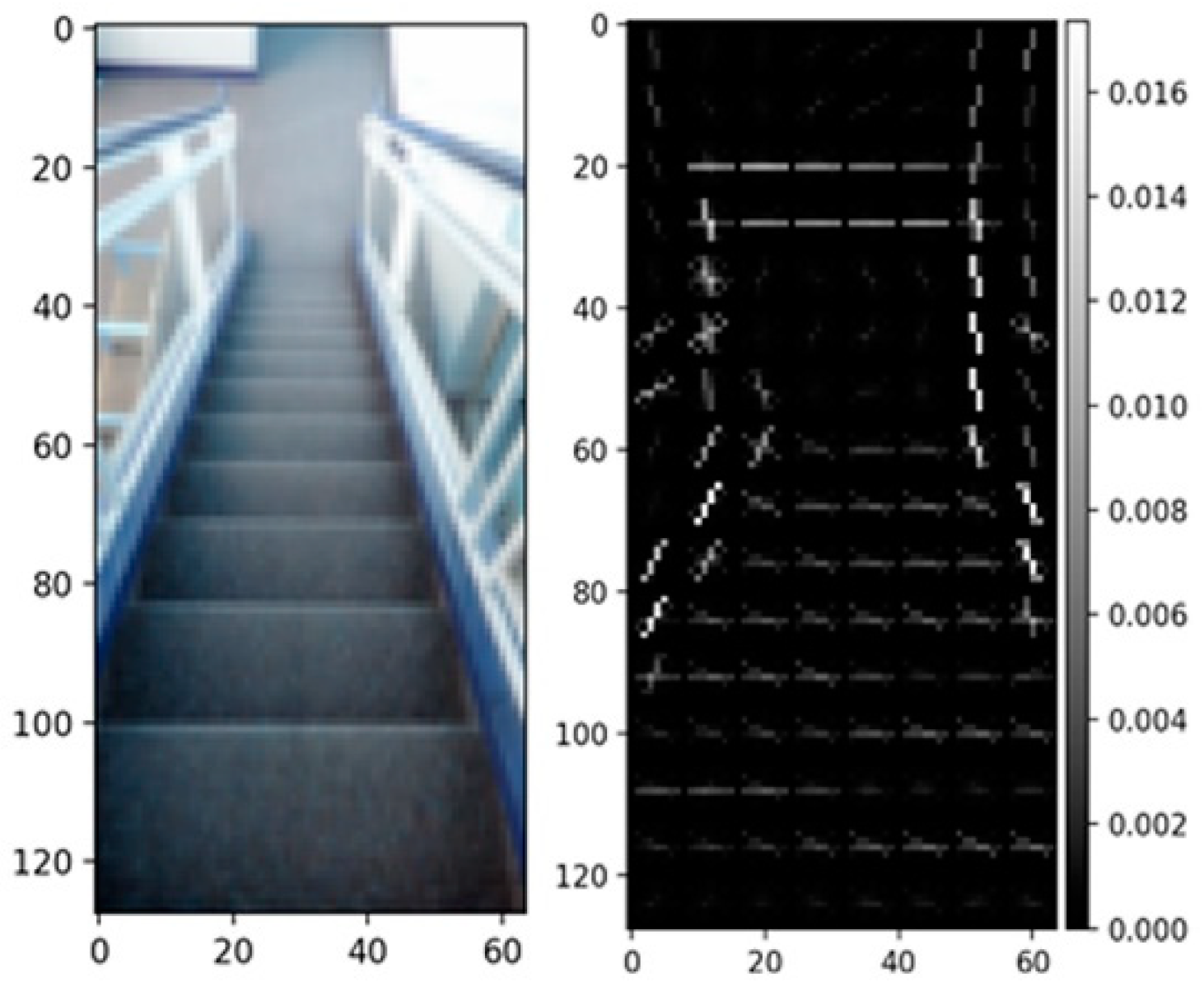
- Feature Extraction Process
- The first step is to resize the images into a smaller size. This is important, as it makes all images equal in size and faster to process. All images are resized to 128 × 64 prior to extraction.
- Model Selection and Training
4.3. Fall Detection
4.4. GPS Tracking
4.5. Guardian Notification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Report on Vision. World Health Organization. 2019. Available online: https://www.who.int/publications/i/item/9789241516570 (accessed on 7 May 2022).
- Bourne, R.; Steinmetz, J.D.; Flaxman, S.; Briant, P.S.; Taylor, H.R.; Casson, R.; Bikbov, M.; Bottone, M.; Braithwaite, T.; Bron, A.M.; et al. Trends in prevalence of blindness and distance and near vision impairment over 30 years: An analysis for the Global Burden of Disease Study. Lancet Glob. Health 2021, 9, e130–e143. [Google Scholar] [CrossRef]
- Chang, W.-J.; Chen, L.-B.; Chen, M.-C.; Su, J.-P.; Sie, C.-Y.; Yang, C.-H. Design and Implementation of an Intelligent Assistive System for Visually Impaired People for Aerial Obstacle Avoidance and Fall Detection. IEEE Sens. J. 2020, 20, 10199–10210. [Google Scholar] [CrossRef]
- Oviedo-Cáceres, M.D.P.; Arias-Pineda, K.N.; Yepes-Camacho, M.D.R.; Falla, P.M. COVID-19 Pandemic: Experiences of People with Visual Impairment. Investig. Educ. Enfermería 2021, 39, e09. [Google Scholar] [CrossRef] [PubMed]
- Senjam, S.S. Impact of COVID-19 pandemic on people living with visual disability. Indian J. Ophthalmol. 2020, 68, 1367–1370. [Google Scholar] [CrossRef] [PubMed]
- Shalaby, W.S.; Odayappan, A.; Venkatesh, R.; Swenor, B.K.; Ramulu, P.Y.; Robin, A.L.; Srinivasan, K.; Shukla, A.G. The Impact of COVID-19 on Individuals Across the Spectrum of Visual Impairment. Am. J. Ophthalmol. 2021, 227, 53–65. [Google Scholar] [CrossRef]
- Khan, S.; Nazir, S.; Khan, H.U. Analysis of Navigation Assistants for Blind and Visually Impaired People: A Systematic Review. IEEE Access 2021, 9, 26712–26734. [Google Scholar] [CrossRef]
- Islam, M.; Sadi, M.S.; Zamli, K.Z.; Ahmed, M. Developing Walking Assistants for Visually Impaired People: A Review. IEEE Sens. J. 2019, 19, 2814–2828. [Google Scholar] [CrossRef]
- Saarthi—Assistive Aid Designed to Optimize Mobility for Visually Impaired. Available online: https://mytorchit.com/saarthi/ (accessed on 21 June 2022).
- WeWALK Smart Cane. Available online: https://wewalk.io/en/ (accessed on 21 June 2022).
- Cardillo, E.; Di Mattia, V.; Manfredi, G.; Russo, P.; De Leo, A.; Caddemi, A.; Cerri, G. An Electromagnetic Sensor Prototype to Assist Visually Impaired and Blind People in Autonomous Walking. IEEE Sens. J. 2018, 18, 2568–2576. [Google Scholar] [CrossRef]
- Ramadhan, A.J. Wearable Smart System for Visually Impaired People. Sensors 2018, 18, 843. [Google Scholar] [CrossRef] [Green Version]
- Singh, B.; Kapoor, M. A Framework for the Generation of Obstacle Data for the Study of Obstacle Detection by Ultrasonic Sensors. IEEE Sens. J. 2021, 21, 9475–9483. [Google Scholar] [CrossRef]
- Ahmad, N.S.; Boon, N.L.; Goh, P. Multi-Sensor Obstacle Detection System Via Model-Based State-Feedback Control in Smart Cane Design for the Visually Challenged. IEEE Access 2018, 6, 64182–64192. [Google Scholar] [CrossRef]
- Mehta, U.; Alim, M.; Kumar, S. Smart Path Guidance Mobile Aid for Visually Disabled Persons. Procedia Comput. Sci. 2017, 105, 52–56. [Google Scholar] [CrossRef]
- Patil, K.; Jawadwala, Q.; Shu, F.C. Design and Construction of Electronic Aid for Visually Impaired People. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 172–182. [Google Scholar] [CrossRef]
- Aljahdali, M.; Abokhamees, R.; Bensenouci, A.; Brahimi, T.; Bensenouci, M.-A. IoT based assistive walker device for frail &visually impaired people. In Proceedings of the 2018 15th Learning and Technology Conference (L&T), Jeddah, Saudi Arabia, 25–26 February 2018; pp. 171–177. [Google Scholar] [CrossRef]
- Salimullina, A.D.; Budanov, D.O. Computer Vision System for Speed Limit Traffic Sign Recognition. In Proceedings of the 2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 25–28 January 2022; pp. 415–418. [Google Scholar]
- Fort, A.; Peruzzi, G.; Pozzebon, A. Quasi-Real Time Remote Video Surveillance Unit for LoRaWAN-based Image Transmission. In Proceedings of the 2021 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4. 0&IoT), Rome, Italy, 7–9 June 2021; pp. 588–593. [Google Scholar]
- Novo-Torres, L.; Ramirez-Paredes, J.-P.; Villarreal, D.J. Obstacle Recognition using Computer Vision and Convolutional Neural Networks for Powered Prosthetic Leg Applications. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 3360–3363. [Google Scholar] [CrossRef]
- Baldo, D.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A multi-layer lorawan infrastructure for smart waste manage-ment. Sensors 2021, 21, 2600. [Google Scholar] [CrossRef]
- Osipov, A.; Shumaev, V.; Ekielski, A.; Gataullin, T.; Suvorov, S.; Mishurov, S.; Gataullin, S. Identification and Classification of Mechanical Damage During Continuous Harvesting of Root Crops Using Computer Vision Methods. IEEE Access 2022, 10, 28885–28894. [Google Scholar] [CrossRef]
- Bangsawan, H.T.; Hanafi, L.; Suryana, D. Digital Imaging Light Energy Saving Lamp Based On A Single Board Com-puter. J. RESTI (Rekayasa Sist. Dan Teknol. Inf.) 2020, 4, 751–756. [Google Scholar] [CrossRef]
- Silva, E.T.; Sampaio, F.; da Silva, L.C.; Medeiros, D.S.; Correia, G.P. A method for embedding a computer vision application into a wearable device. Microprocess. Microsyst. 2020, 76, 103086. [Google Scholar] [CrossRef]
- Yang, G.; Saniie, J. Sight-to-Sound Human-Machine Interface for Guiding and Navigating Visually Impaired People. IEEE Access 2020, 8, 185416–185428. [Google Scholar] [CrossRef]
- Badave, A.; Jagtap, R.; Kaovasia, R.; Rahatwad, S.; Kulkarni, S. Android Based Object Detection System for Visually Impaired. In Proceedings of the 2020 International Conference on Industry 4.0 Technology (I4Tech), Pune, India, 13–15 February 2020. [Google Scholar] [CrossRef]
- Ye, C.; Qian, X. 3-D Object Recognition of a Robotic Navigation Aid for the Visually Impaired. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 26, 441–450. [Google Scholar] [CrossRef]
- Gupta, H.; Dahiya, D.; Dutta, M.K.; Travieso, C.M.; Vasquez-Nunez, J.L. Real Time Surrounding Identification for Visually Impaired using Deep Learning Technique. In Proceedings of the 2019 IEEE International Work Conference on Bioinspired Intelligence (IWOBI), Budapest, Hungary, 3–5 July 2019. [Google Scholar] [CrossRef]
- Cornacchia, M.; Kakillioglu, B.; Zheng, Y.; Velipasalar, S. Deep Learning-Based Obstacle Detection and Classification With Portable Uncalibrated Patterned Light. IEEE Sens. J. 2018, 18, 8416–8425. [Google Scholar] [CrossRef]
- Rahman, W.; Tashfia, S.S.; Islam, R.; Hasan, M.; Ibn Sultan, S.; Mia, S.; Rahman, M.M. The architectural design of smart blind assistant using IoT with deep learning paradigm. Internet Things 2020, 13, 100344. [Google Scholar] [CrossRef]
- Khan, M.A.; Paul, P.; Rashid, M.; Hossain, M.; Ahad, A.R. An AI-Based Visual Aid with Integrated Reading Assistant for the Completely Blind. IEEE Trans. Hum.-Mach. Syst. 2020, 50, 507–517. [Google Scholar] [CrossRef]
- InvenSense Inc. MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.RM-MPU-6000A-00 Datasheet. Available online: Https://invensense.tdk.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf (accessed on 7 May 2022).
- Bashiri, F.S.; LaRose, E.; Peissig, P.; Tafti, A.P. MCIndoor20000: A fully-labeled image dataset to advance indoor objects detection. Data Brief 2018, 17, 71–75. [Google Scholar] [CrossRef] [PubMed]
- Mocan, R.; Diosan, L. Obstacle recognition in traffic by adapting the hog descriptor and learning in layers. Studia Univ. Babes-Bolyai Inform. 2015, LX, 47–54. [Google Scholar]
- Ghaffari, S.; Soleimani, P.; Li, K.F.; Capson, D.W. Analysis and Comparison of FPGA-Based Histogram of Oriented Gradients Implementations. IEEE Access 2020, 8, 79920–79934. [Google Scholar] [CrossRef]
- Muhammad, I.; Yan, Z. Supervised machine learning approaches: A survey. ICTACT J. Soft Comput. 2015, 5, 946–952. [Google Scholar] [CrossRef]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Wadsworth Inc.: Monterey, CA, USA, 1984. [Google Scholar]
- Zhang, H. The optimality of naive Bayes. AA 2004, 1, 3. [Google Scholar]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN model-based approach in classification. In Proceedings of the OTM Con-federated International Conferences on the Move to Meaningful Internet Systems, Catania, Italy, 3–7 November 2003. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Cauteruccio, F.; Cinelli, L.; Fortino, G.; Savaglio, C.; Terracina, G.; Ursino, D.; Virgili, L. An approach to compute the scope of a social object in a Multi-IoT scenario. Pervasive Mob. Comput. 2020, 67, 101223. [Google Scholar] [CrossRef]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.D.; Boulogne, F.; Warner, J.; Yager, N.; Gouillart, E.; Yu, T. scikit-image contributors. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Beitian Co. Limited. BS-71U GPS Receiver Datasheet. Available online: https://manualzz.com/doc/52938665/d-flife-vk-162-g-mouse-usb-gps-dongle-navigation-module-e. (accessed on 7 May 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Sensing/Capturing Devices | Computing Devices | Advantages | Disadvantages |
|---|---|---|---|---|
| Sensor-based | US, IR, motion, laser radar sensors, RFID sensors | Microcontroller, System-on-chip | Low cost, fast detection, easy to install, easy to use, suitable for wayfinding | Bulky, US readings may change with temperature and humidity, no identification of obstacles |
| Computer Vision–based | Depth, vision, RGB cameras, other sensors | Single board computer, laptop, PC | Detects and identifies objects, real-time data acquirement and training, lightweight | High cost, camera works poorly outdoors (because of sunlight), classification works poorly in crowded areas, slow response time due to processing |
| Mobile Phone–Based | Phone cameras, accelerometers, gyroscopes, magnetometers, GPS proximity sensors | Mobile phone processor | Low cost, efficient, compact, covers indoor and outdoor areas | Not configurable, performs poorly in elevated areas, short detection range |
| Ref. No. | Technology | Device | Features | Obstacle Identification | ||||
|---|---|---|---|---|---|---|---|---|
| Obstacles | Alerts | Remote Monitoring and Guardian Alert | Fall Detection | - | ||||
| Detect | Identify | |||||||
| [11] | Sensor Based | Cane | Yes | No | Yes | No | No | - |
| [12] | Sensor Based | Wearable | Yes | No | Yes | SMS | Yes | - |
| [13] | Sensor Based | Cane | Yes | No | No | No | No | - |
| [14] | Sensor Based | Cane | Yes | No | Yes | No | No | - |
| [15] | Sensor Based | Hand-held | Yes | No | Yes | No | No | - |
| [16] | Sensor Based | Shoe | Yes | No | Yes | No | No | - |
| [17] | Sensor Based | Walker | Yes | No | Yes | Mobile App | No | - |
| [24] | Computer Vision Based | Wearable | No | Yes | No | No | No | GLCM-based crosswalk identification |
| [25] | Computer Vision + Mobile Phone Based | Smartphone | Yes | Yes | Yes | No | No | Neural network–based object identification |
| [26] | Computer Vision + Mobile Phone Based | Smartphone | Yes | Yes | No | No | No | TensorFlow-based object identification |
| [27] | Computer Vision Based | Cane | Yes | Yes | Yes | No | No | GMM-based object identification |
| [28] | Computer Vision Based | Hand-held | No | Yes | No | No | No | CNN-based street sign identification |
| [29] | Computer Vision Based | Hand-held | Yes | Yes | No | No | No | CNN- and LSTM-based object identification |
| [30] | Sensor Based + Computer Vision Based | Cane and Cap | Yes | Yes | Yes | Mobile App | Yes | Mask R-CNN–based object identification |
| [31] | Sensor Based + Computer Vision Based | Eyeglasses | Yes | Yes | Yes | No | No | TensorFlow-based object identification |
| Proposed system | Sensor Based + Computer Vision Based | Cane | Yes | Yes | Yes | Mobile App | Yes | SVM-based object identification |
| Device Name | Full Scale Range | LSB Sensitivity |
|---|---|---|
Accelerometer | ±2 g, ±4 g, ±8 g, ±16 g | 16,384 LSB/g, 8192 LSB/g, 4096 LSB/g, 2048 LSB/g |
Gyroscope | ±2500/s, ±5000/s, ±10,000/s, ±20,000/s | 131 LSB/°/s, 65.5 LSB/°/s, 32.8 LSB/°/s, 16.4 LSB/°/s |
Ultrasonic Sensor | 2 cm to 400 cm | 3 mm |
Camera | 8 megapixel | 1080p × 30 |
GPS | 2 m | 1–10 times/s (refresh rate) |
| Classification Algorithm | Decision Tree | Naïve Bayes | SVM | K-Nearest Neighbor | |
|---|---|---|---|---|---|
| Performance Metrics | Accuracy | 0.89 | 0.93 | 0.99 | 0.98 |
| Recall | 0.91 | 0.93 | 0.99 | 0.98 | |
| Precision | 0.91 | 0.94 | 0.99 | 0.98 | |
| F-Score | 0.91 | 0.93 | 0.99 | 0.98 | |
| Classification Algorithm | Naïve Bayes | SVM | K-Nearest Neighbor | |
|---|---|---|---|---|
| Performance Metrics | Accuracy | 0.83 | 1.00 | 0.83 |
| Recall | 0.83 | 1.00 | 0.83 | |
| Precision | 0.88 | 1.00 | 0.88 | |
| F-Score | 0.83 | 1.00 | 0.83 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhou, S.; Alnabulsi, A.; Al-Ali, A.R.; Arshi, M.; Darwish, F.; Almaazmi, S.; Alameeri, R. An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People. Sensors 2022, 22, 5202. https://doi.org/10.3390/s22145202
Dhou S, Alnabulsi A, Al-Ali AR, Arshi M, Darwish F, Almaazmi S, Alameeri R. An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People. Sensors. 2022; 22(14):5202. https://doi.org/10.3390/s22145202
Chicago/Turabian StyleDhou, Salam, Ahmad Alnabulsi, A. R. Al-Ali, Mariam Arshi, Fatima Darwish, Sara Almaazmi, and Reem Alameeri. 2022. "An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People" Sensors 22, no. 14: 5202. https://doi.org/10.3390/s22145202
APA StyleDhou, S., Alnabulsi, A., Al-Ali, A. R., Arshi, M., Darwish, F., Almaazmi, S., & Alameeri, R. (2022). An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People. Sensors, 22(14), 5202. https://doi.org/10.3390/s22145202