
Cross-Platform Implementation of an SSVEP-Based BCI for the Control of a 6-DOF Robotic Arm




Abstract
1. Introduction
2. Materials and Methods
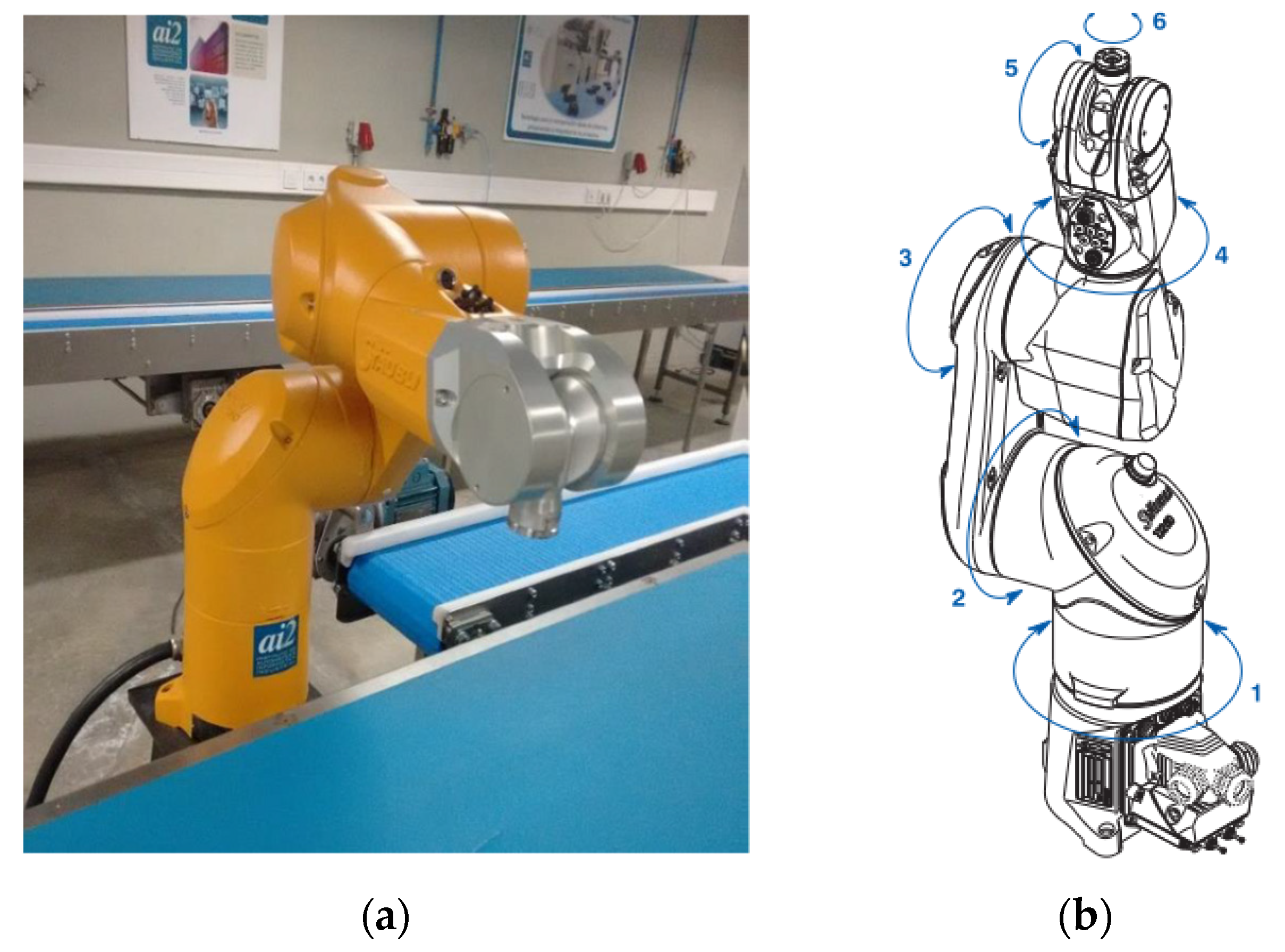
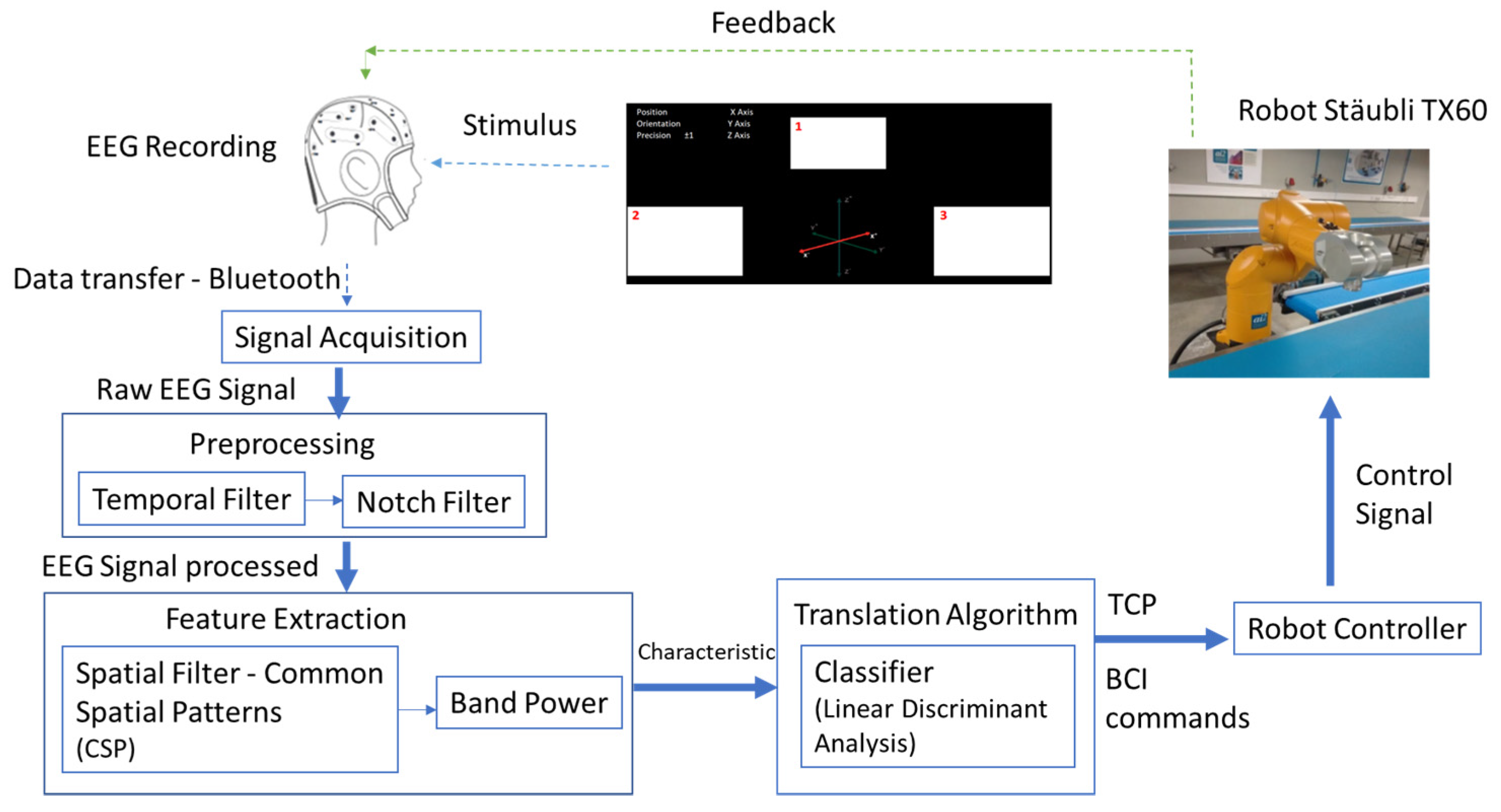
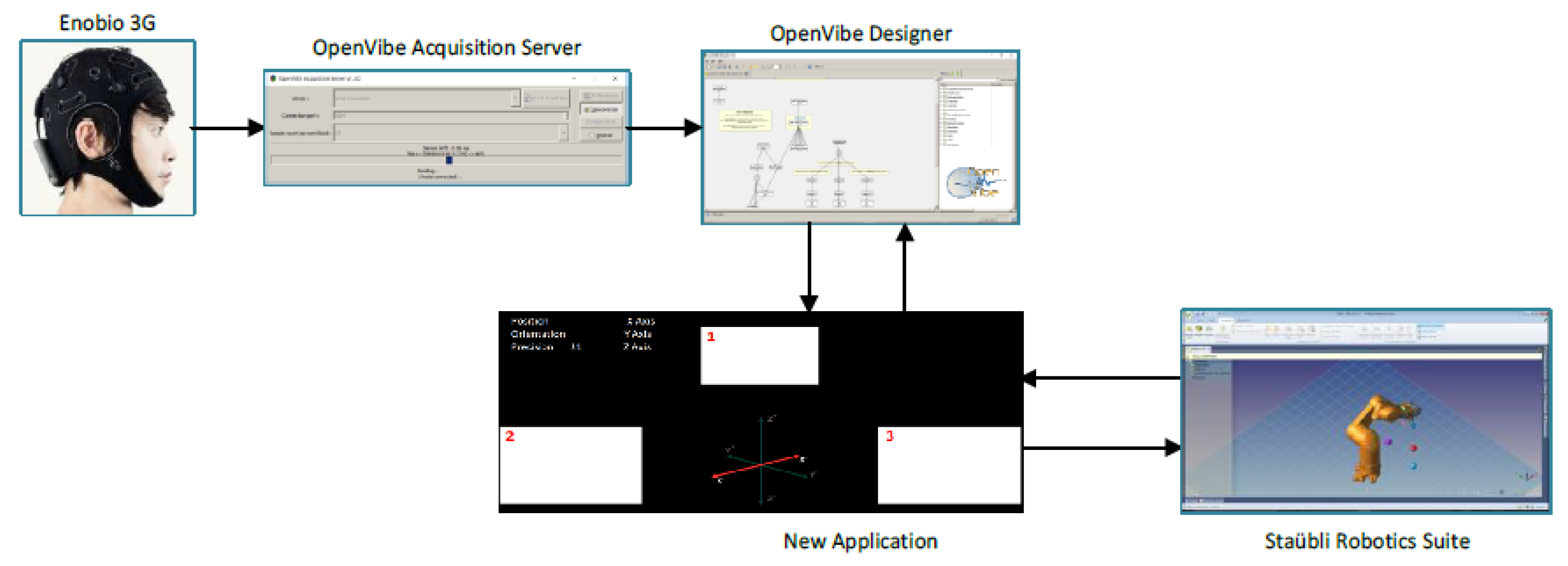
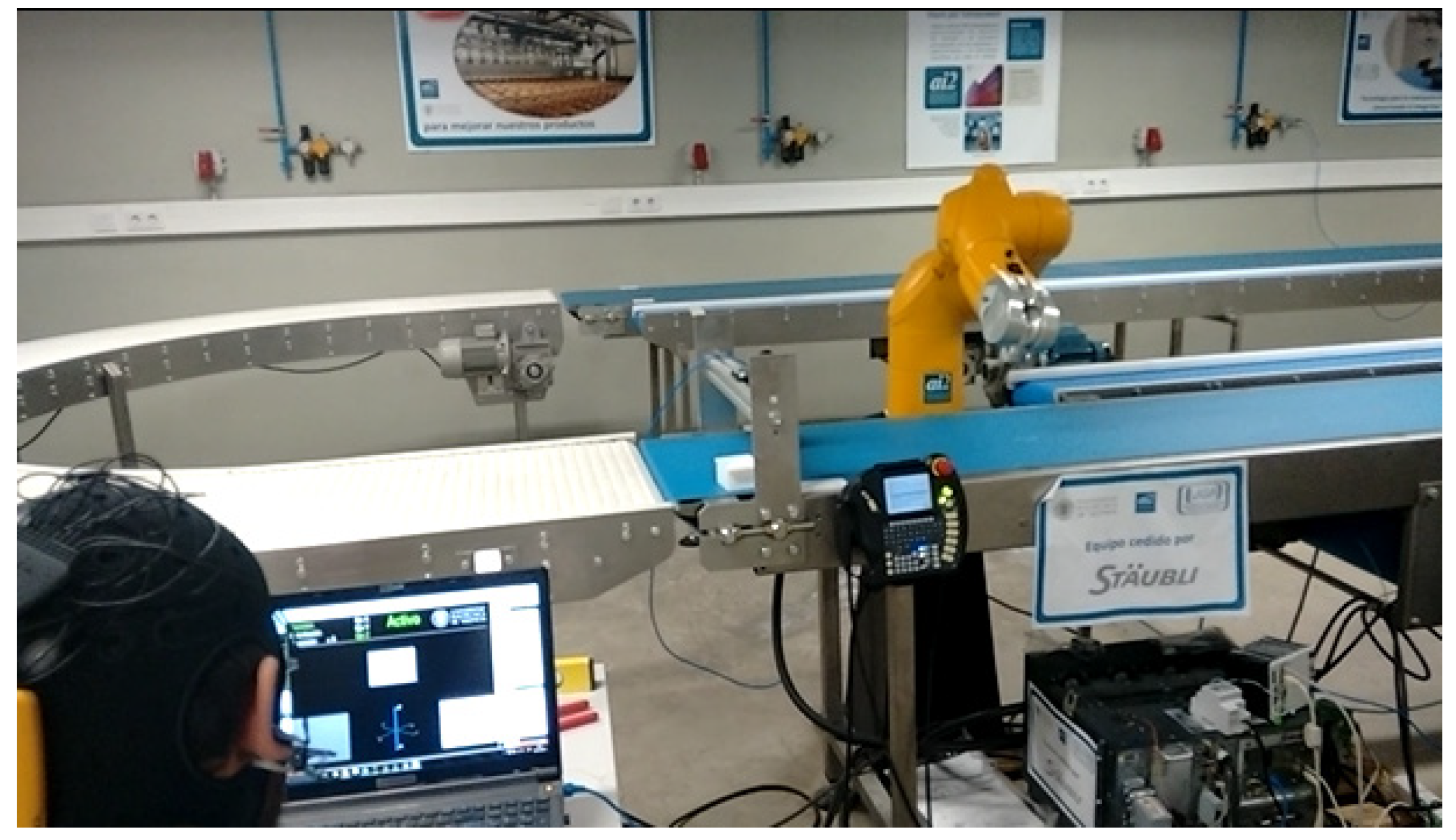
2.1. System Description
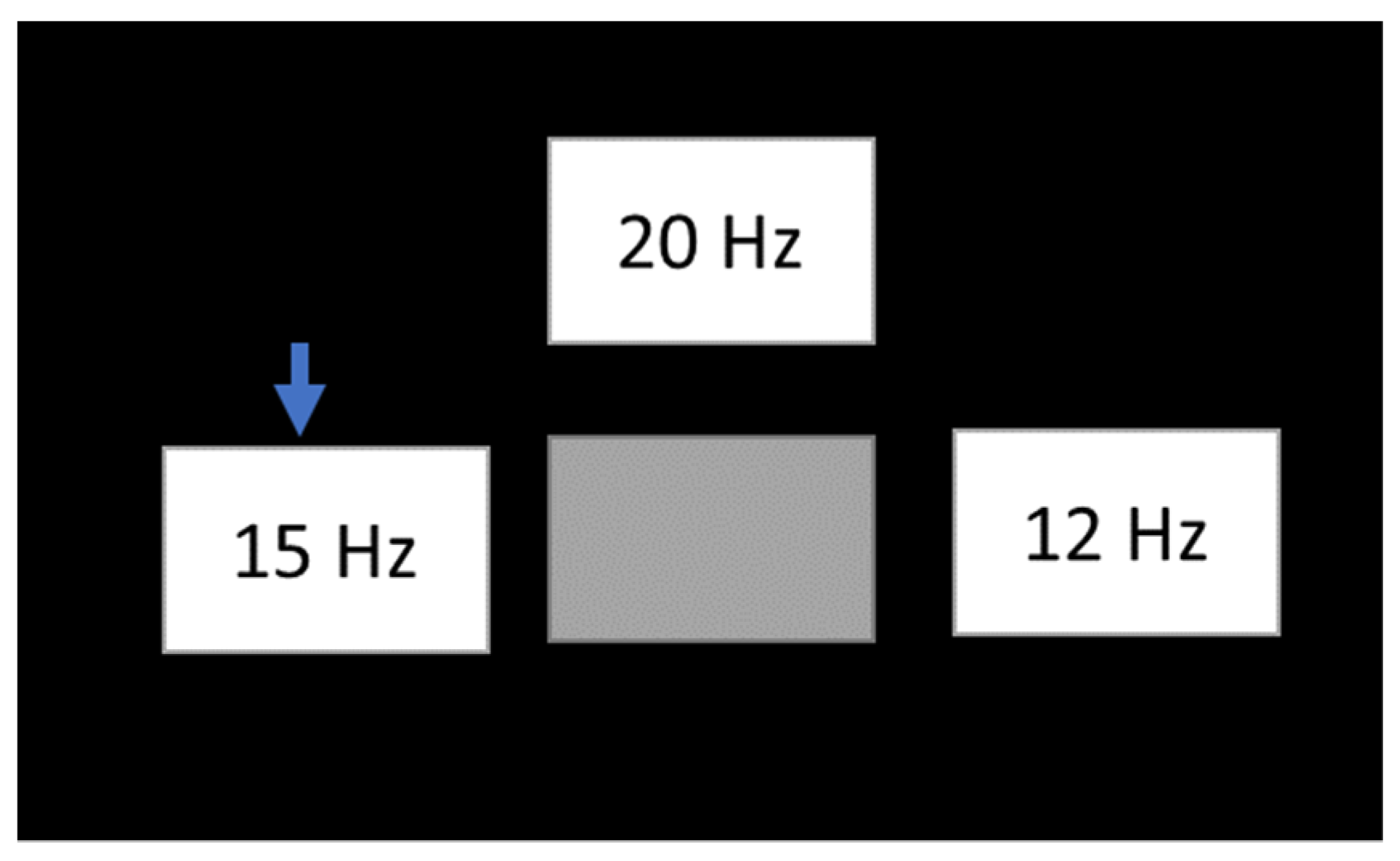
2.2. Stimulus Generation
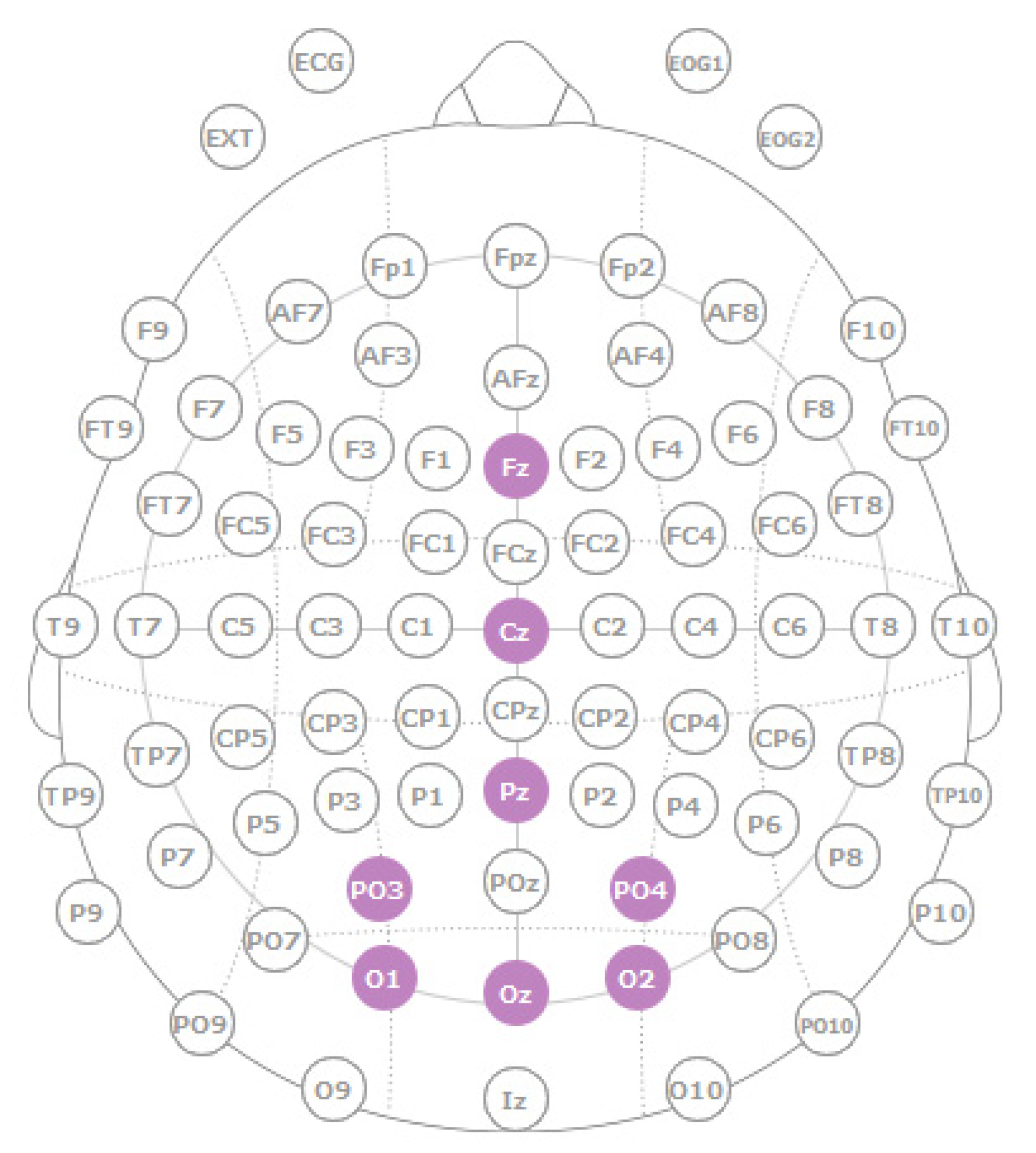
2.3. Signal Acquisition
2.4. Signal Processing
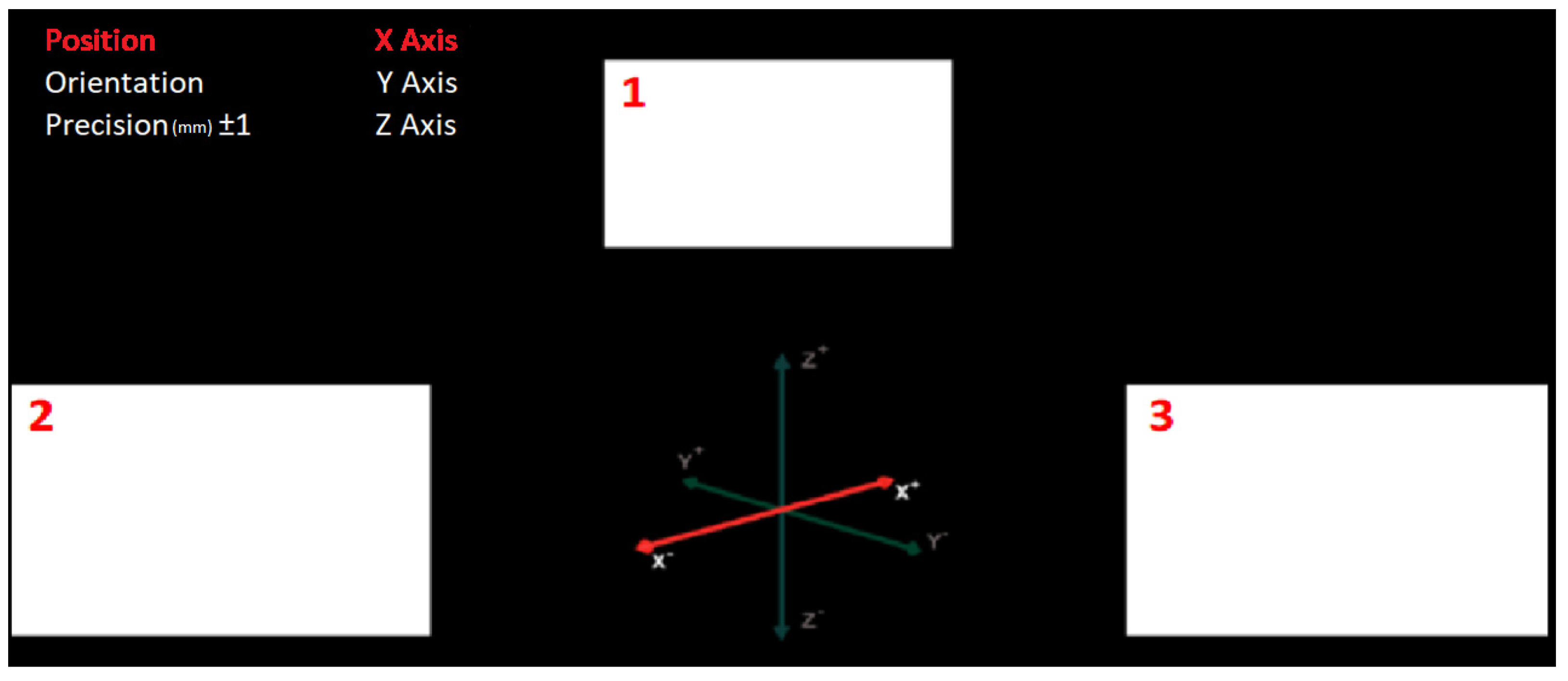
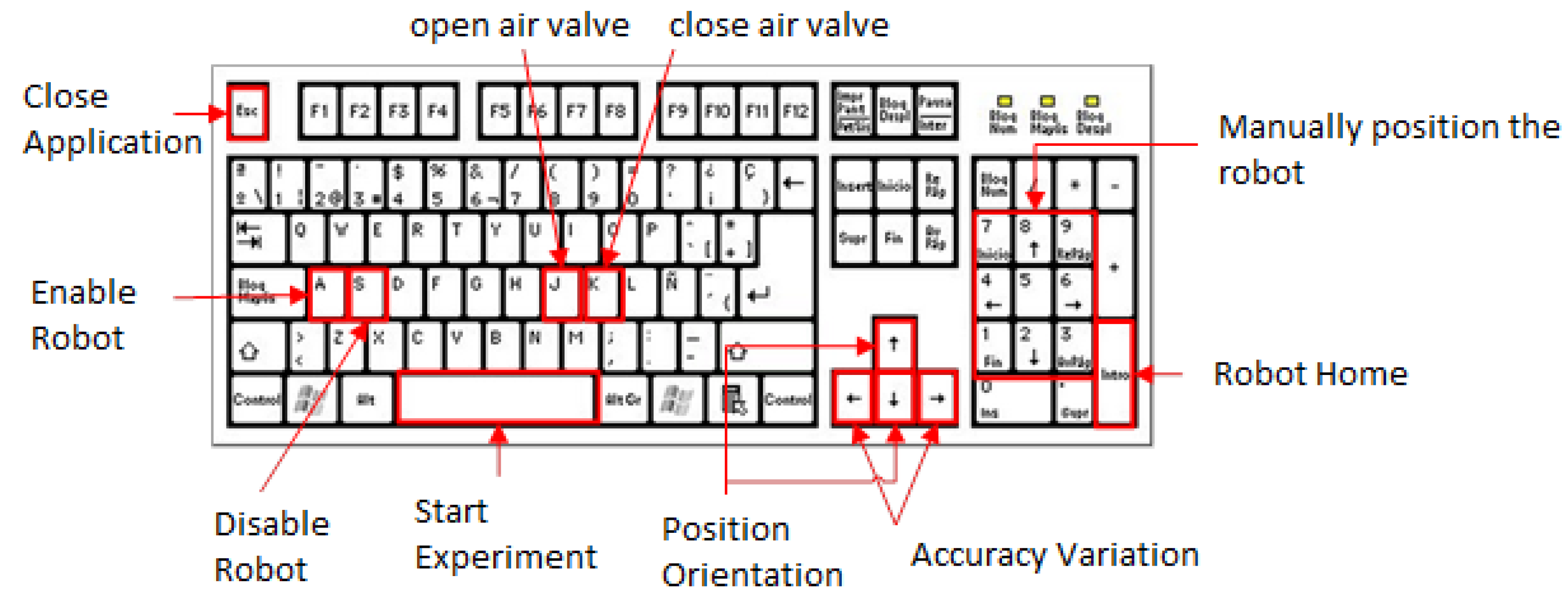
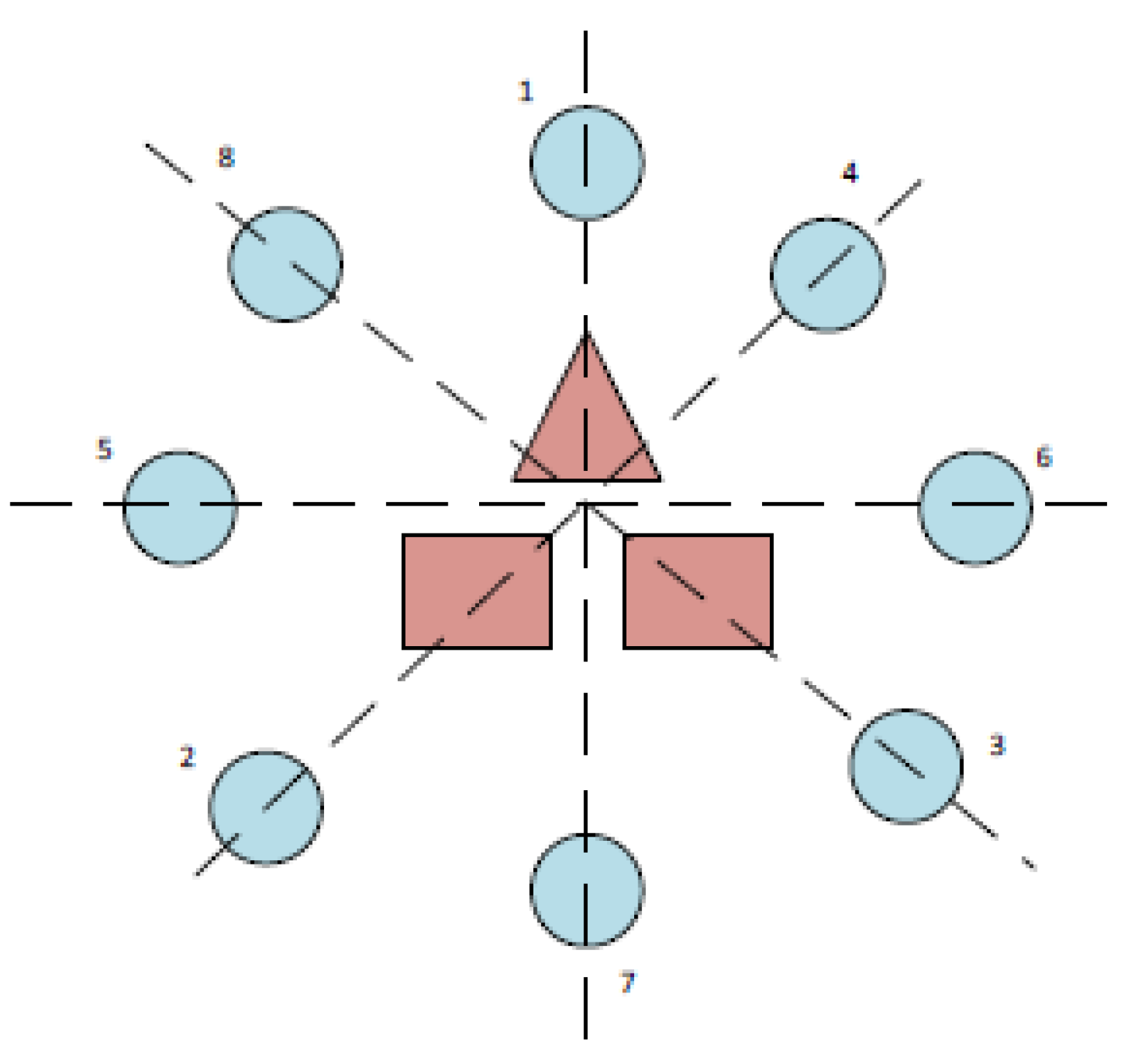
2.5. GUI for Robotic Arm Control
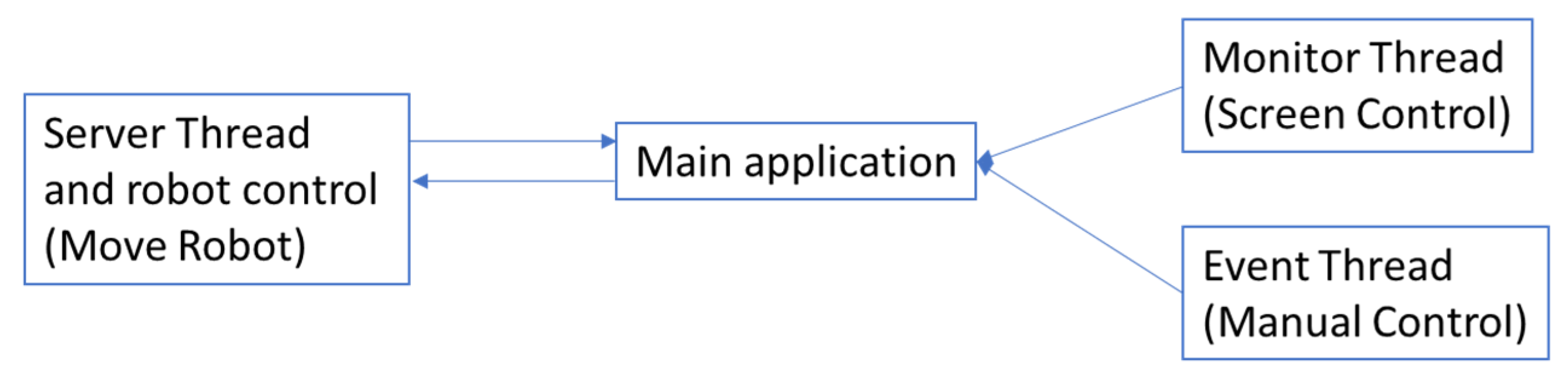
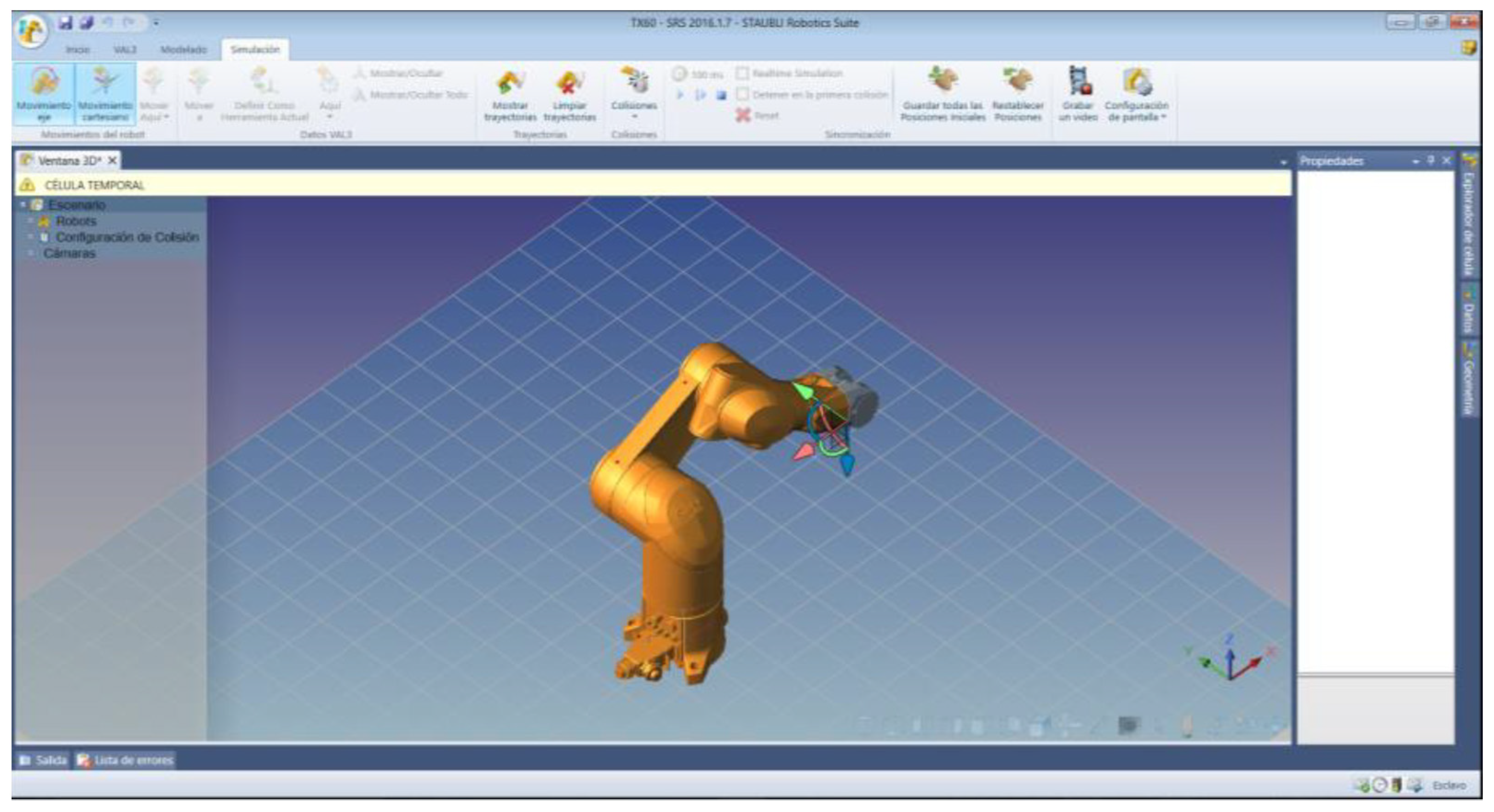
2.6. Robot Communication Module
2.7. Subjects
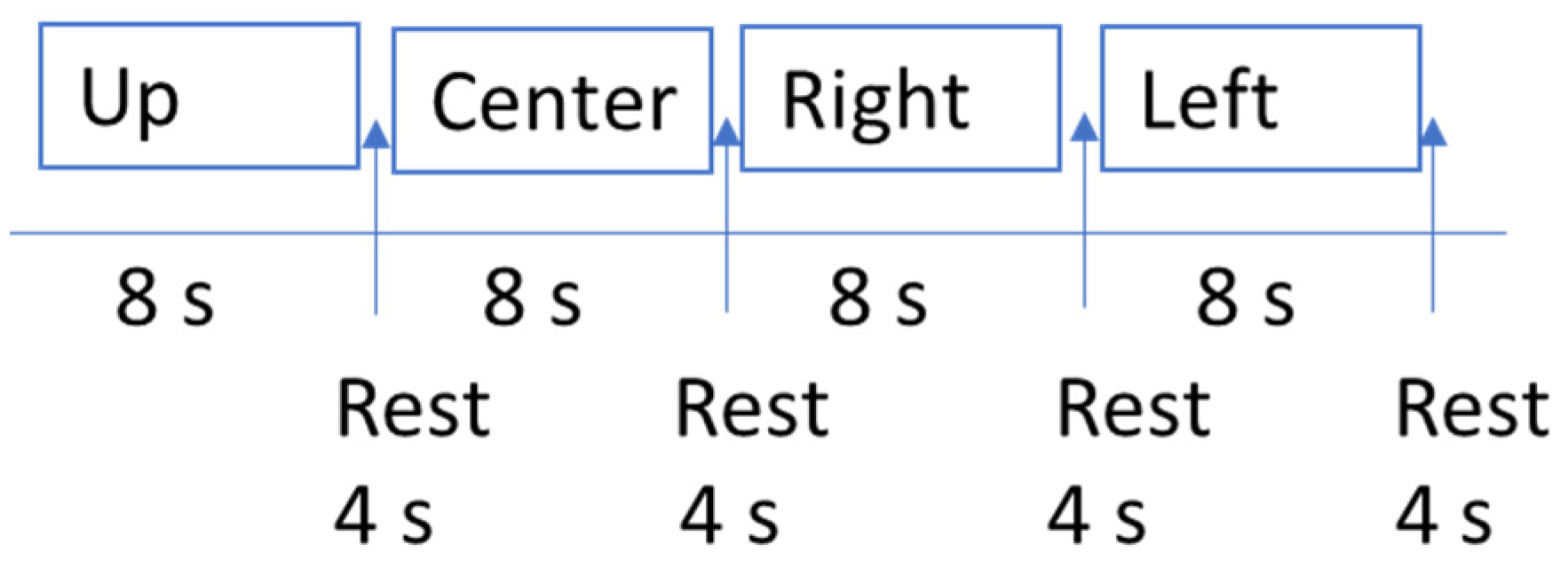
2.8. Experimental Procedure
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Abbreviations
| BCI | Brain-computer interface |
| CSP | Common spatial patterns filter |
| EEG | Electroencephalography |
| EMG | Electromyography |
| GUI | Graphical user interface |
| ITR | Information transfer rate |
| LCD | Liquid crystal display |
| LDA | Linear discriminant analysis |
| mVEP | Motion-onset visual evoked potential |
| MI | Motor imagery |
| P300 | Event-related potential component |
| SPSS | Statistical Package for the Social Sciences |
| SSVEP | Steady-State Visual Evoked Potentials |
| TCP/IP | Transmission Control Protocol/Internet Protocol |
| UDP | User datagram protocol |
| VEP | Visual evoked potential |
| VRPN | Virtual reality peripherals network |
References
- Lotte, F.; Nam, C.S.; Nijholt, A. Introduction: Evolution of Brain-Computer Interfaces. In Brain-Computer Interface Handbook: Technological and Theoretical Advances; Nam, C.S., Nijholt, A., Lotte, F., Eds.; CRC Press: Oxford, UK, 2018; pp. 1–8. ISBN 9781351231954. [Google Scholar]
- Wolpaw, J.R.; Wolpaw, E.W. Brain-Computer Interfaces: Something New under the Sun. Brain-Comput. Interfaces Princ. Pract. 2012, 3, 123–125. [Google Scholar] [CrossRef]
- Klein, E.; Nam, C.S. Neuroethics and Brain-Computer Interfaces (BCIs). Brain-Comput. Interfaces 2016, 3, 123–125. [Google Scholar] [CrossRef]
- Nijholt, A.; Nam, C.S. Arts and Brain-Computer Interfaces (BCIs). Brain-Comput. Interfaces 2015, 2, 57–59. [Google Scholar] [CrossRef]
- Schalk, G.; Brunner, P.; Gerhardt, L.A.; Bischof, H.; Wolpaw, J.R. Brain-Computer Interfaces (BCIs): Detection Instead of Classification. J. Neurosci. Methods 2008, 167, 51–62. [Google Scholar] [CrossRef] [PubMed]
- Lotte, F. A Tutorial on EEG Signal Processing Techniques for Mental State Recognition in Brain-Computer Interfaces. In Guide to Brain-Computer Music Interfacing; Miranda, E.R., Castet, J., Eds.; Springer: London, UK, 2014; ISBN 978-1-4471-6583-5. [Google Scholar]
- Nicolas-Alonso, L.F.; Gomez-Gil, J. Brain Computer Interfaces, a Review. Sensors 2012, 12, 1211–1279. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain-Computer Interfaces for Communication and Control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Vidal, J.J. Toward Direct Brain-Computer Communication. Annu. Rev. Biophys. Bioeng. 1973, 2, 157–180. [Google Scholar] [CrossRef]
- Nam, C.S.; Choi, I.; Wadeson, A.; Whang, M. Brain Computer Interface. An Emerging Interaction Technology. In Brain Computer Interfaces Handbook: Technological and Theoretical Advances; Pergamon Press: Oxford, UK, 2018; pp. 11–52. [Google Scholar]
- Placidi, G.; Petracca, A.; Spezialetti, M.; Iacoviello, D. A Modular Framework for EEG Web Based Binary Brain Computer Interfaces to Recover Communication Abilities in Impaired People. J. Med. Syst. 2016, 40, 34. [Google Scholar] [CrossRef]
- Tang, J.; Xu, M.; Han, J.; Liu, M.; Dai, T.; Chen, S.; Ming, D. Optimizing SSVEP-Based BCI System towards Practical High-Speed Spelling. Sensors 2020, 20, 4186. [Google Scholar] [CrossRef]
- Mannan, M.M.N.; Kamran, M.A.; Kang, S.; Choi, H.S.; Jeong, M.Y. A Hybrid Speller Design Using Eye Tracking and SSVEP Brain–Computer Interface. Sensors 2020, 20, 891. [Google Scholar] [CrossRef]
- Zhou, Z.; Yin, E.; Liu, Y.; Jiang, J.; Hu, D. A Novel Task-Oriented Optimal Design for P300-Based Brain-Computer Interfaces. J. Neural Eng. 2014, 11, 56003. [Google Scholar] [CrossRef] [PubMed]
- Collinger, J.L.; Wodlinger, B.; Downey, J.E.; Wang, W.; Tyler-Kabara, E.C.; Weber, D.J.; McMorland, A.J.C.; Velliste, M.; Boninger, M.L.; Schwartz, A.B. High-Performance Neuroprosthetic Control by an Individual with Tetraplegia. Lancet 2013, 381, 557–564. [Google Scholar] [CrossRef]
- Kai, K.A.; Guan, C.; Sui, G.C.K.; Beng, T.A.; Kuah, C.; Wang, C.; Phua, K.S.; Zheng, Y.C.; Zhang, H. A Clinical Study of Motor Imagery-Based Brain-Computer Interface for Upper Limb Robotic Rehabilitation. In Proceedings of the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society: Engineering the Future of Biomedicine, Minneapolis, MN, USA, 3–6 September 2009; pp. 5981–5984. [Google Scholar]
- Meng, J.; Zhang, S.; Bekyo, A.; Olsoe, J.; Baxter, B.; He, B. Noninvasive Electroencephalogram Based Control of a Robotic Arm for Reach and Grasp Tasks. Sci. Rep. 2016, 6, 38565. [Google Scholar] [CrossRef] [PubMed]
- Hortal, E.; Planelles, D.; Costa, A.; Iáñez, E.; Úbeda, A.; Azorín, J.M.; Fernández, E. SVM-Based Brain-Machine Interface for Controlling a Robot Arm through Four Mental Tasks. Neurocomputing 2015, 151, 116–121. [Google Scholar] [CrossRef]
- Quiles, E.; Suay, F.; Candela, G.; Chio, N.; Jiménez, M.; Álvarez-kurogi, L. Low-Cost Robotic Guide Based on a Motor Imagery Brain–Computer Interface for Arm Assisted Rehabilitation. Int. J. Environ. Res. Public Health 2020, 17, 699. [Google Scholar] [CrossRef]
- Iturrate, I.; Antelis, J.M.; Kübler, A.; Minguez, J. A Noninvasive Brain-Actuated Wheelchair Based on a P300 Neurophysiological Protocol and Automated Navigation. IEEE Trans. Robot. 2009, 25, 614–627. [Google Scholar] [CrossRef]
- Singla, R.; Khosla, A.; Jha, R. Influence of Stimuli Color on Steady-State Visual Evoked Potentials Based BCI Wheelchair Control. J. Biomed. Sci. Eng. 2013, 06, 1050–1055. [Google Scholar] [CrossRef][Green Version]
- Lamti, H.; Khelifa, M.M.; Alimi, A.; Gorce, P. Effect of Fatigue on Ssvep During Virtual Wheelchair Navigation. J. Theor. Appl. Inf. Technol. 2014, 65, 1–10. [Google Scholar]
- Piña-Ramirez, O.; Valdes-Cristerna, R.; Yanez-Suarez, O. Scenario Screen: A Dynamic and Context Dependent P300 Stimulator Screen Aimed at Wheelchair Navigation Control. Comput. Math. Methods Med. 2018, 2018, 7108906. [Google Scholar] [CrossRef]
- Edlinger, G.; Holzner, C.; Guger, C.; Groenegress, C.; Slater, M. Brain-Computer Interfaces for Goal Orientated Control of a Virtual Smart Home Environment. In Proceedings of the 4th International IEEE/EMBS Conference on Neural Engineering, Antalya, Turkey, 29 April–2 May 2009; pp. 463–465. [Google Scholar] [CrossRef]
- Yang, D.; Nguyen, T.-H.; Chung, W.-Y. A Bipolar-Channel Hybrid Brain-Computer Interface System for Home Automation Control Utilizing Steady-State Visually Evoked Potential and Eye-Blink Signals. Sensors 2020, 20, 5474. [Google Scholar] [CrossRef]
- Bevilacqua, V.; Tattoli, G.; Buongiorno, D.; Loconsole, C.; Leonardis, D.; Barsotti, M.; Frisoli, A.; Bergamasco, M. A Novel BCI-SSVEP Based Approach for Control of Walking in Virtual Environment Using a Convolutional Neural Network. In Proceedings of the 2014 International Joint Conference on Neural Networks, Beijing, China, 6–11 July 2014; pp. 4121–4128. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Flotzinger, D.; Kalcher, J. Brain-Computer Interface-a New Communication Device for Handicapped Persons. J. Microcomput. Appl. 1993, 16, 293–299. [Google Scholar] [CrossRef]
- Braun, N.; Kranczioch, C.; Liepert, J.; Dettmers, C.; Zich, C.; Büsching, I.; Debener, S. Motor Imagery Impairment in Postacute Stroke Patients. Neural Plast. 2017, 2017, 4653256. [Google Scholar] [CrossRef] [PubMed]
- Hasbulah, M.H.; Jafar, F.A.; Nordin, M.H.; Yokota, K. Brain-Controlled for Changing Modular Robot Configuration by Employing Neurosky’s Headset. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 617. [Google Scholar] [CrossRef]
- Herath, H.M.K.K.M.B.; de Mel, W.R. Controlling an Anatomical Robot Hand Using the Brain-Computer Interface Based on Motor Imagery. Adv. Hum-Comput. Interact. 2021, 2021, 5515759. [Google Scholar] [CrossRef]
- Gillini, G.; di Lillo, P.; Arrichiello, F. An Assistive Shared Control Architecture for a Robotic Arm Using EEG-Based BCI with Motor Imagery. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 27 September–1 October 2021; pp. 4132–4137. [Google Scholar]
- Jochumsen, M.; Janjua, T.A.M.; Arceo, J.C.; Lauber, J.; Buessinger, E.S.; Kæseler, R.L. Induction of Neural Plasticity Using a Low-Cost Open Source Brain-Computer Interface and a 3D-Printedwrist Exoskeleton. Sensors 2021, 21, 572. [Google Scholar] [CrossRef]
- Shen, X.; Wang, X.; Lu, S.; Li, Z.; Shao, W.; Wu, Y. Research on the Real-Time Control System of Lower-Limb Gait Movement Based on Motor Imagery and Central Pattern Generator. Biomed. Signal. Processing Control 2022, 71, 102803. [Google Scholar] [CrossRef]
- Krusienski, D.J.; Sellers, E.W.; McFarland, D.J.; Vaughan, T.M.; Wolpaw, J.R. Toward Enhanced P300 Speller Performance. J. Neurosci. Methods 2008, 167, 15–21. [Google Scholar] [CrossRef]
- Malki, A.; Yang, C.; Wang, N.; Li, Z. Mind Guided Motion Control of Robot Manipulator Using EEG Signals. In Proceedings of the 2015 5th International Conference on Information Science and Technology, Sanya, Hainan, 14–15 November 2015. [Google Scholar]
- Middendorf, M.; McMillan, G.; Calhoun, G.; Jones, K.S. Brain-Computer Interfaces Based on the Steady-State Visual-Evoked Response. IEEE Trans. Rehabil. Eng. 2000, 8, 211–214. [Google Scholar] [CrossRef]
- Sandesh, R.S.; Venkatesan, N. Steady State VEP-Based BCI to Control a Five-Digit Robotic Hand Using LabVIEW. Int. J. Biomed. Eng. Technol. 2022, 38, 109–127. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, B.; Wang, W.; Zhang, D.; Gu, X. Brain-Controlled Robotic Arm Grasping System Based on Adaptive TRCA. In Proceedings of the ACM International Conference Proceeding Series; Association for Computing Machinery: New York, NY, USA, 2021; pp. 363–367. [Google Scholar]
- Karunasena, S.P.; Ariyarathna, D.C.; Ranaweera, R.; Wijayakulasooriya, J.; Kim, K.; Dassanayake, T. Single-Channel EEG SSVEP-Based BCI for Robot Arm Control. In Proceedings of the 2021 IEEE Sensors Applications Symposium, SAS 2021, Sundsvall, Sweden, 2–4 August 2021. [Google Scholar]
- Sharma, K.; Maharaj, S.K. Continuous and Spontaneous Speed Control of a Robotic Arm Using SSVEP. In Proceedings of the 9th IEEE International Winter Conference on Brain-Computer Interface, Gangwon, Korea, 22–24 February 2021. [Google Scholar]
- Chen, Z.; Li, J.; Liu, Y.; Tang, P. A Flexible Meal Aid Robotic Arm System Based on SSVEP. In Proceedings of the 2020 IEEE International Conference on Progress in Informatics and Computing, Shanghai, China, 18–20 December 2020. [Google Scholar]
- Zhang, D.; Yang, B.; Gao, S.; Gu, X. Brain-Controlled Robotic Arm Based on Adaptive FBCCA. In Proceedings of the Communications in Computer and Information Science, Salta, Argentina, 4–8 October 2021; Volume 1369. [Google Scholar]
- Lin, C.T.; Chiu, C.Y.; Singh, A.K.; King, J.T.; Ko, L.W.; Lu, Y.C.; Wang, Y.K. A Wireless Multifunctional SSVEP-Based Brain-Computer Interface Assistive System. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 375–383. [Google Scholar] [CrossRef]
- Kaseler, R.L.; Leerskov, K.; Struijk, L.N.S.A.; Dremstrup, K.; Jochumsen, M. Designing a Brain Computer Interface for Control of an Assistive Robotic Manipulator Using Steady State Visually Evoked Potentials. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Toronto, ON, Canada, 24–28 June 2019; Volume 2019. [Google Scholar]
- Tabbal, J.; Mechref, K.; El-Falou, W. Brain Computer Interface for Smart Living Environment. In Proceedings of the 2018 9th Cairo International Biomedical Engineering Conference, Hilton Pyramids, Egypt, 20–22 December 2018. [Google Scholar]
- Chen, X.; Zhao, B.; Wang, Y.; Xu, S.; Gao, X. Control of a 7-DOF Robotic Arm System with an SSVEP-Based BCI. Int. J. Neural Syst. 2018, 28, 1850018. [Google Scholar] [CrossRef] [PubMed]
- Pelayo, P.; Murthy, H.; George, K. Brain-Computer Interface Controlled Robotic Arm to Improve Quality of Life. In Proceedings of the 2018 IEEE International Conference on Healthcare Informatics (ICHI), New York, NY, USA, 4–7 June 2018; pp. 398–399. [Google Scholar]
- Chen, X.; Zhao, B.; Gao, X. Noninvasive Brain-Computer Interface Based High-Level Control of a Robotic Arm for Pick and Place Tasks. In Proceedings of the ICNC-FSKD 2018—14th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery, Huangshan, China, 28–30 July 2018; pp. 1193–1197. [Google Scholar] [CrossRef]
- van Erp, J.; Lotte, F.; Tangermann, M. Brain-Computer Interfaces: Beyond Medical Applications. Comput. (Long Beach Calif) 2012, 45, 26–34. [Google Scholar] [CrossRef]
- Al-maqtari, M.T.; Taha, Z.; Moghavvemi, M. Steady State-VEP Based BCI for Control Gripping of a Robotic Hand. In Proceedings of the International Conference for Technical Postgraduates 2009, TECHPOS 2009, Kuala Lumpur, Malaysia, 14–15 December 2009; pp. 1–3. [Google Scholar] [CrossRef]
- Meattini, R.; Scarcia, U.; Melchiorri, C.; Belpaeme, T. Gestural Art: A Steady State Visual Evoked Potential (SSVEP) Based Brain Computer Interface to Express Intentions through a Robotic Hand. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 211–216. [Google Scholar] [CrossRef]
- Çaǧlayan, O.; Arslan, R.B. Robotic Arm Control with Brain Computer Interface Using P300 and SSVEP. In Proceedings of the IASTED International Conference on Biomedical Engineering, Innsbruck, Austria, 13–15 February 2013; pp. 141–144. [Google Scholar] [CrossRef]
- Lüth, T.; Ojdanić, D.; Friman, O.; Prenzel, O.; Gräser, A. Low Level Control in a Semi-Autonomous Rehabilitation Robotic System via a Brain-Computer Interface. In Proceedings of the 2007 IEEE 10th the International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 12–15 June 2007; pp. 721–728. [Google Scholar] [CrossRef]
- Rakshit, A.; Ghosh, S.; Konar, A.; Pal, M. A Novel Hybrid Brain-Computer Interface for Robot Arm Manipulation Using Visual Evoked Potential. In Proceedings of the 2017 9th International Conference on Advances in Pattern Recognition, ICAPR 2017, Bangalore, India, 27–30 December 2017; pp. 404–409. [Google Scholar] [CrossRef]
- Gao, Q.; Dou, L.; Belkacem, A.N.; Chen, C. Noninvasive Electroencephalogram Based Control of a Robotic Arm for Writing Task Using Hybrid BCI System. BioMed. Res. Int. 2017, 2017, 8316485. [Google Scholar] [CrossRef]
- Peyton, G.; Hoehler, R.; Pantanowitz, A. Hybrid BCI for Controlling a Robotic Arm over an IP Network. In IFMBE Proceedings; Lacković, I., Vasic, D., Eds.; Springer International Publishing: Cham, Switzerland, 2015; Volume 45, pp. 517–520. ISBN 978-3-319-11127-8. [Google Scholar]
- Achic, F.; Montero, J.; Penaloza, C.; Cuellar, F. Hybrid BCI System to Operate an Electric Wheelchair and a Robotic Arm for Navigation and Manipulation Tasks. Proc. IEEE Workshop Adv. Robot. Its Soc. Impacts ARSO 2016, 2016, 249–254. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, Y.; Lu, J.; Li, P. A Hybrid BCI Based on SSVEP and EOG for Robotic Arm Control. Front. Neurorobot. 2020, 14, 583641. [Google Scholar] [CrossRef] [PubMed]
- Postelnicu, C.C.; Girbacia, F.; Voinea, G.D.; Boboc, R. Towards Hybrid Multimodal Brain Computer Interface for Robotic Arm Command. Int. Conf. Hum-Comput. Interact. 2019, 11580, 460–471. [Google Scholar]
- Chen, X.; Zhao, B.; Wang, Y.; Gao, X. Combination of High-Frequency SSVEP-Based BCI and Computer Vision for Controlling a Robotic Arm. J. Neural. Eng. 2019, 16, 26012. [Google Scholar] [CrossRef]
- Choi, W.-S.; Yeom, H.-G. Studies to Overcome Brain–Computer Interface Challenges. Appl. Sci. 2022, 12, 2598. [Google Scholar] [CrossRef]
- Huggins, J.E.; Guger, C.; Allison, B.; Anderson, C.W.; Batista, A.; Brouwer, A.-M.; Brunner, C.; Chavarriaga, R.; Fried-Oken, M.; Gunduz, A.; et al. Workshops of the Fifth International Brain-Computer Interface Meeting: Defining the Future. Brain-Comput. Interfaces 2014, 1, 27–49. [Google Scholar] [CrossRef]
- Mihajlovic, V.; Grundlehner, B.; Vullers, R.; Penders, J. Wearable, Wireless EEG Solutions in Daily Life Applications: What Are We Missing? IEEE J. Biomed. Health Inform. 2015, 19, 6–21. [Google Scholar] [CrossRef]
- Lightbody, G.; Galway, L.; McCullagh, P. The Brain Computer Interface: Barriers to Becoming Pervasive. In Pervasive Health. Human–Computer Interaction Series; Holzinger, A., Ziefle, M., Röcker, C., Eds.; Routledge: London, UK, 2014; pp. 101–129. [Google Scholar]
- Silva, C.R.; de Araújo, R.S.; Albuquerque, G.; Moioli, R.C.; Brasil, F.L. Interfacing Brains to Robotic Devices—A VRPN Communication Application. Braz. Congr. Biomed. Eng. 2019, 70, 597–603. [Google Scholar]
- Olchawa, R.; Man, D. Development of the BCI Device Controlling C++ Software, Based on Existing Open Source Projects. Control. Comput. Eng. Neurosci. 2021, 1362, 60–71. [Google Scholar]
- Aljalal, M.; Ibrahim, S.; Djemal, R.; Ko, W. Comprehensive Review on Brain-Controlled Mobile Robots and Robotic Arms Based on Electroencephalography Signals. Intell. Serv. Robot. 2020, 13, 539–563. [Google Scholar] [CrossRef]
- Leeb, R.; Friedman, D.; Müller-Putz, G.R.; Scherer, R.; Slater, M.; Pfurtscheller, G. Self-Paced (Asynchronous) BCI Control of a Wheelchair in Virtual Environments: A Case Study with a Tetraplegic. Comput. Intell. Neurosci. 2007, 2007, 79642. [Google Scholar] [CrossRef] [PubMed]
- Yendrapalli, K.; Tammana, S.S.N.P.K. The Brain Signal Detection for Controlling the Robot. Int. J. Sci. Eng. Technol. 2014, 3, 1280–1283. [Google Scholar]
- Delorme, A.; Makeig, S. EEGLAB: An Open Source Toolbox for Analysis of Single-Trial EEG Dynamics. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef]
- Ortner, R.; Allison, B.Z.; Korisek, G.; Gaggl, H.; Pfurtscheller, G. An SSVEP BCI to Control a Hand Orthosis for Persons with Tetraplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 1–5. [Google Scholar] [CrossRef]
- Cauvery, N.K. Brain Controlled Wheelchair for Disabled. Int. J. Comput. Sci. Eng. Inf. Technol. Res. 2014, 4, 42075. [Google Scholar]
- Renard, Y.; Lotte, F.; Gibert, G.; Congedo, M.; Maby, E.; Delannoy, V.; Bertrand, O.; Lécuyer, A. OpenViBE: An Open-Source Software Platform to Design, Test, and Use Brain–Computer Interfaces in Real and Virtual Environments. Presence 2010, 19, 35–53. [Google Scholar] [CrossRef]
- Singala, K.V.; Trivedi, K.R. Connection Setup of Openvibe Tool with EEG Headset, Parsing and Processing of EEG Signals. In Proceedings of the International Conference on Communication and Signal Processing, Melmaruvathur, India, 6–8 April 2016. [Google Scholar]
- Minin, A.; Syskov, A.; Borisov, V. Hardware-Software Integration for EEG Coherence Analysis. In Proceedings of the 2019 Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology, Yekaterinburg, Russia, 25–26 April 2019. [Google Scholar]
- Schalk, G.; Mcfarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: A General-Purpose Brain-Computer Interface (BCI ) System. IEEE Trans. Biomed. Eng. 2004, 51, 1034–1043. [Google Scholar] [CrossRef]
- Escolano, C.; Antelis, J.M.; Minguez, J. A Telepresence Mobile Robot Controlled with a Noninvasive Brain-Computer Interface. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2012, 42, 793–804. [Google Scholar] [CrossRef] [PubMed]
- Appriou, A.; Pillette, L.; Trocellier, D.; Dutartre, D.; Cichocki, A.; Lotte, F. BioPyC, an Open-Source Python Toolbox for Offline Electroencephalographic and Physiological Signals Classification. Sensors 2021, 21, 5740. [Google Scholar] [CrossRef] [PubMed]
- Perego, P.; Maggi, L.; Parini, S.; Andreoni, G. BCI++: A New Framework for Brain Computer Interface Application. In Proceedings of the 18th International Conference on Software Engineering and Data Engineering 2009, SEDE 2009, Washington, DC, USA, 22–24 June 2009; pp. 37–41. [Google Scholar]
- Durka, P.J.; Kus, R.; Zygierewicz, J.; Michalska, M.; Milanowski, P.; Labecki, M.; Spustek, T.; Laszuk, D.; Duszyk, A.; Kruszynski, M. User-Centered Design of Brain-Computer Interfaces: OpenBCI.Pl and BCI Appliance. Bull. Pol. Acad. Sci. Technol. Sci. 2012, 60, 427–431. [Google Scholar] [CrossRef]
- Delorme, A.; Mullen, T.; Kothe, C.; Acar, Z.A.; Bigdely-Shamlo, N.; Vankov, A.; Makeig, S. EEGLAB, SIFT, NFT, BCILAB, and ERICA: New Tools for Advanced EEG Processing. Comput. Intell. Neurosci. 2011, 2011, 130714. [Google Scholar] [CrossRef] [PubMed]
- Toledo-Peral, C.L.; Gutiérrez-Martínez, J.; Mercado-Gutiérrez, J.A.; Martín-Vignon-Whaley, A.I.; Vera-Hernández, A.; Leija-Salas, L. SEMG Signal Acquisition Strategy towards Hand FES Control. J. Healthc. Eng. 2018, 2018, 2350834. [Google Scholar] [CrossRef]
- Li, C.; Jia, T.; Xu, Q.; Ji, L.; Pan, Y. Brain-Computer Interface Channel-Selection Strategy Based on Analysis of Event-Related Desynchronization Topography in Stroke Patients. J. Healthc. Eng. 2019, 2019, 3817124. [Google Scholar] [CrossRef]
- Tiraboschi, M.; Avanzani, F.; Boccignone, G. Listen to Your Mind’s (He)Art: A System for Affective Music Generation Via Brain-Computer Interface. In Proceedings of the 18th Sound and Music Computing Conference, Online, 29 June–1 July 2021; pp. 1–8. [Google Scholar]
- Ghoslin, B.; Nandikolla, V.K. Design of Omnidirectional Robot Using Hybrid Brain Computer Interface. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Virtual, 16–19 November 2020; Volume 5: Biomedical and Biotechnology. p. V005T05A070. [Google Scholar] [CrossRef]
- Wannajam, S.; Thamviset, W. Brain Wave Pattern Recognition of Two-Task Imagination by Using Single-Electrode EEG. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2019; Volume 769. [Google Scholar]
- Tariq, M.; Trivailo, P.M.; Simic, M. Motor Imagery Based EEG Features Visualization for BCI Applications. In Procedia Computer Science; Elsevier: Amsterdam, The Netherlands, 2018; Volume 126. [Google Scholar]
- Barros, E.S.; Neto, N. Classification Procedure for Motor Imagery EEG Data. In Proceedings of the Augmented Cognition: Intelligent Technologies—12th International Conference, {AC} 2018, Held as Part of {HCI} International 2018, Las Vegas, NV, USA, 15–20 July 2018; Schmorrow, D.D., Fidopiastis, C.M., Eds.; Springer: Cham, Switzerland, 2018; Volume 10915, pp. 201–211. [Google Scholar]
- Plechawska-Wójcik, M.; Kaczorowska, M.; Michalik, B. Comparative Analysis of Two-Group Supervised Classification Algorithms in the Study of P300-Based Brain-Computer Interface. MATEC Web Conf. 2019, 252, 3010. [Google Scholar] [CrossRef]
- Fouad, I.A. A Robust and Reliable Online P300-Based BCI System Using Emotiv EPOC + Headset. J. Med. Eng. Technol. 2021, 45, 94–114. [Google Scholar] [CrossRef]
- Izadi, B.; Ghaedi, A.; Ghasemian, M. Neuropsychological Responses of Consumers to Promotion Strategies and the Decision to Buy Sports Products. Asia Pac. J. Mark. Logist. 2021, 34, 1203–1221. [Google Scholar] [CrossRef]
- Babiker, A.; Faye, I. A Hybrid EMD-Wavelet EEG Feature Extraction Method for the Classification of Students’ Interest in the Mathematics Classroom. Comput. Intell. Neurosci. 2021, 2021, 6617462. [Google Scholar] [CrossRef]
- Peiqing, H. Multidimensional State Data Reduction and Evaluation of College Students’ Mental Health Based on SVM. J. Math. 2022, 2022, 4961203. [Google Scholar] [CrossRef]
- Teixeira, A.R.; Rodrigues, I.; Gomes, A.; Abreu, P.; Rodríguez-Bermúdez, G. Using Brain Computer Interaction to Evaluate Problem Solving Abilities. In Lecture Notes in Computer; Springer: Berlin/Heidelberg, Germany, 2021; Volume 12776. [Google Scholar]
- Rajendran, V.G.; Jayalalitha, S.; Adalarasu, K. EEG Based Evaluation of Examination Stress and Test Anxiety among College Students. IRBM 2021, 1–13. [Google Scholar] [CrossRef]
- Sun, G.; Wen, Z.; Ok, D.; Doan, L.; Wang, J.; Chen, Z.S. Detecting Acute Pain Signals from Human EEG. J. Neurosci. Methods 2021, 347, 108964. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Li, W.; Mao, X.; Li, M. SSVEP-Based Experimental Procedure for Brain-Robot Interaction with Humanoid Robots. J. Vis. Exp. 2015, 2015, 53558. [Google Scholar] [CrossRef] [PubMed]
- Martišius, I.; Damaševičius, R. A Prototype SSVEP Based Real Time BCI Gaming System. Comput. Intell. Neurosci. 2016, 2016, 3861425. [Google Scholar] [CrossRef]
- Gao, X.; Xu, D.; Cheng, M.; Gao, S. A BCI-Based Environmental Controller for the Motion-Disabled. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 137–140. [Google Scholar] [CrossRef]
- Norcia, A.M.; Appelbaum, L.G.; Ales, J.M.; Cottereaur, B.R.; Rossion, B. The Steady State VEP in Research. J. Vis. 2015, 15, 1–46. [Google Scholar] [CrossRef]
- Cáceres, C.A.; Rosário, J.M.; Amaya, D. Approach to Assistive Robotics Based on an EEG Sensor and a 6-DoF Robotic Arm. Int. Rev. Mech. Eng. 2016, 10, 253–260. [Google Scholar] [CrossRef]
- McFarland, D.J.; Wolpaw, J.R. EEG-Based Brain–Computer Interfaces. Curr. Opin. Biomed. Eng. 2017, 4, 194–200. [Google Scholar] [CrossRef]
- Bakardjian, H.; Tanaka, T.; Cichocki, A. Brain Control of Robotic Arm Using Affective Steady-State Visual Evoked Potentials. In Proceedings of the 5th IASTED Inter-national Conference Human-Computer Interaction, Maui, HI, USA, 23–25 August 2010; pp. 264–270. [Google Scholar]
- Herrmann, C.S. Human EEG Responses to 1–100 Hz Flicker: Resonance Phenomena in Visual Cortex and Their Potential Correlation to Cognitive Phenomena. Exp. Brain Res. 2001, 137, 346–353. [Google Scholar] [CrossRef]
- Müller, M.M.; Hillyard, S. Concurrent Recording of Steady-State and Transient Event-Related Potentials as Indices of Visual-Spatial Selective Attention. Clin. Neurophysiol. 2000, 111, 1544–1552. [Google Scholar] [CrossRef]
- Ko, L.; Chikara, R.K.; Lee, Y.; Lin, W. Exploration of User’s Mental State Changes during Performing Brain–Computer Interface. Sensors 2020, 20, 3169. [Google Scholar] [CrossRef] [PubMed]
- Candela, G.; Quiles, E.; Chio, N.; Suay, F. Chapter # 13 Attentional Variables and BCI Performance: Comparing Two Strategies. In Psychology Applications & Developments IV; inSciencePress: Lisboa, Portugal, 2018; pp. 130–139. [Google Scholar]
- Zhu, D.; Bieger, J.; Molina, G.G.; Aarts, R.M. A Survey of Stimulation Methods Used in SSVEP-Based BCIs. Comput. Intell. Neurosci. 2010, 2010, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Staubli, Robots Industriales de 6 Ejes TX60. Available online: https://www.staubli.com/es/ (accessed on 24 June 2022).
- Brunner, P.; Schalk, G. BCI Software. In Brain–Computer Interfaces Handbook Technological and Theoretical Advances; CRC Press: New York, NY, USA, 2018; pp. 321–342. ISBN 9781351231954. [Google Scholar]
- BCI2000. Available online: http://www.schalklab.org/research/bci2000 (accessed on 16 March 2022).
- Matlab. Available online: https://www.mathworks.com/products/matlab.html (accessed on 16 March 2022).
- Openvibe. Available online: http://openvibe.inria.fr (accessed on 16 March 2022).
- Floriano, A.; Diez, P.F.; Bastos-Filho, T.F. Evaluating the Influence of Chromatic and Luminance Stimuli on SSVEPs from Behind-the-Ears and Occipital Areas. Sensors 2018, 18, 615. [Google Scholar] [CrossRef]
- Duart, X.; Quiles, E.; Suay, F.; Chio, N.; García, E.; Morant, F. Evaluating the Effect of Stimuli Color and Frequency on SSVEP. Sensors 2021, 21, 117. [Google Scholar] [CrossRef]
- Cao, T.; Wan, F.; Mak, P.U.; Mak, P.-I.; Vai, M.I.; Hu, Y. Flashing Color on the Performance of SSVEP-Based Brain-Computer Interfaces. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 1819–1822. [Google Scholar]
- Tello, R.M.; Müller, S.M.; Bastos, T.F.; Ferreira, A. Evaluation of Different Stimuli Color for an SSVEP-Based BCI. In Proceedings of the XXIV Congresso Brasileiro De Engenharia Biomédica-CBEB 2014, Uberlândia, Brazil, 13–17 October 2014; pp. 25–28. [Google Scholar]
- Neuroelectrics. Enobio Products. Available online: http://www.neuroelectrics.com (accessed on 16 March 2022).
- Işcan, Z.; Nikulin, V.V. Steady State Visual Evoked Potential (SSVEP) Based Brain-Computer Interface (BCI) Performance under Different Perturbations. PLoS ONE 2018, 13, e0191673. [Google Scholar] [CrossRef]
- Perlstein, W.M.; Cole, M.A.; Larson, M.; Kelly, K.; Seignourel, P.; Keil, A. Steady-State Visual Evoked Potentials Reveal Frontally-Mediated Working Memory Activity in Humans. Neurosci. Lett. 2003, 342, 191–195. [Google Scholar] [CrossRef]
- Jin, J.; Xiao, R.; Daly, I.; Miao, Y.; Wang, X.; Cichocki, A. Internal Feature Selection Method of CSP Based on L1-Norm and Dempster-Shafer Theory. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4814–4825. [Google Scholar] [CrossRef]
- Lotte, F.; Guan, C. Regularizing Common Spatial Patterns to Improve BCI Designs: Unified Theory and New Algorithms. IEEE Trans. Biomed. Eng. 2011, 58, 355–362. [Google Scholar] [CrossRef]
- Lotte, F.; Bougrain, L.; Cichocki, A.; Clerc, M.; Congedo, M.; Rakotomamonjy, A.; Yger, F. A Review of Classification Algorithms for EEG-Based Brain-Computer Interfaces: A 10 Year Update. J. Neural Eng. 2018, 15, 31005. [Google Scholar] [CrossRef]
- Fabien, L.; Marco, C. EEG Feature Extraction. In Brain–Computer Interfaces 1; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016; pp. 127–143. ISBN 9781119144977. [Google Scholar]
- Falzon, O.; Camilleri, K.; Muscat, J. Complex-Valued Spatial Filters for SSVEP-Based BCIs with Phase Coding. IEEE Trans. Biomed. Eng. 2012, 59, 2486–2495. [Google Scholar] [CrossRef] [PubMed]
- Bialas, P.; Milanowski, P. A High Frequency Steady-State Visually Evoked Potential Based Brain Computer Interface Using Consumer-Grade EEG Headset. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBC 2014, Chicago, IL, USA, 26–30 August 2014; pp. 5442–5445. [Google Scholar] [CrossRef]
- Chu, Y.; Zhao, X.; Han, J.; Zhao, Y.; Yao, J. SSVEP Based Brain-Computer Interface Controlled Functional Electrical Stimulation System for Upper Extremity Rehabilitation. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014; pp. 2244–2249. [Google Scholar] [CrossRef]
- Touyama, H. A Study on EEG Quality in Physical Movements with Steady-State Visual Evoked Potentials. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 4217–4220. [Google Scholar] [CrossRef]
- Carvalho, S.N.; Costa, T.B.S.; Uribe, L.F.S.; Soriano, D.C.; Yared, G.F.G.; Coradine, L.C.; Attux, R. Comparative Analysis of Strategies for Feature Extraction and Classification in SSVEP BCIs. Biomed. Signal Processing Control 2015, 21, 34–42. [Google Scholar] [CrossRef]
- Fabiani, G.E.; McFarland, D.J.; Wolpaw, J.R.; Pfurtscheller, G. Conversion of EEG Activity into Cursor Movement by a Brain-Computer Interface (BCI). IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 331–338. [Google Scholar] [CrossRef] [PubMed]
- Duda, R.O.; Hart, P.E.; Stork, D.G.; Wiley, J. Pattern Classification All Materials in These Slides Were Taken from Pattern Classification, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Maby, E. Practical Guide to Performing an EEG Experiment. In Brain-Computer Interfaces 2; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 163–177. [Google Scholar]
- Speier, W.; Arnold, C.; Pouratian, N. Evaluating True BCI Communication Rate through Mutual Information and Language Models. PLoS ONE 2013, 8, e78432. [Google Scholar] [CrossRef]
- McFarland, D.J.; McCane, L.M.; David, S.V.; Wolpaw, J.R. Spatial Filter Selection for EEG-Based Communication. Electroencephalogr. Clin. Neurophysiol. 1997, 103, 386–394. [Google Scholar] [CrossRef]
- Carvalhaes, C.; de Barros, J.A. The Surface Laplacian Technique in EEG: Theory and Methods. Int. J. Psychophysiol. 2015, 97, 174–188. [Google Scholar] [CrossRef]
- Falzon, O.; Camilleri, K.P. Multi-Colour Stimuli to Improve Information Transfer Rates in SSVEP-Based Brain-Computer Interfaces. In Proceedings of the 2013 6th International IEEE/EMBS Conference on Neural Engineering (NER), San Diego, CA, USA, 6–8 November 2013; pp. 443–446. [Google Scholar] [CrossRef]
- Çiǧ, H.; Hanbay, D.; Tüysüz, F. Robot Arm Control with for SSVEP-Based Brain Signals in Brain Computer Interface|SSVEP Tabanli Beyin Bilgisayar Arayüzü Ile Robot Kol Kontrolü. In Proceedings of the IDAP 2017—International Artificial Intelligence and Data Processing Symposium, Malatya, Turkey, 16–17 September 2017. [Google Scholar] [CrossRef]
- Chiu, C.Y.; Singh, A.K.; Wang, Y.K.; King, J.T.; Lin, C.T. A Wireless Steady State Visually Evoked Potential-Based BCI Eating Assistive System. In Proceedings of the International Joint Conference on Neural Networks, Anchorage, AK, USA, 4–19 May 2017; Volume 2017. [Google Scholar]
- Openvibe Tutorial. Available online: http://openvibe.inria.fr/tutorial-how-to-cross-validate-better (accessed on 25 June 2022).
- Jeunet, C.; Lotte, F.; N’Kaoua, B. Human Learning for Brain-Computer Interfaces. In Brain-Computer Interfaces 1; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 233–250. [Google Scholar]
- Vidaurre, C.; Blankertz, B. Towards a Cure for BCI Illiteracy. Brain Topogr. 2010, 23, 194–198. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TAG | Value | Description |
|---|---|---|
| OVTK_StimulationId_ExperimentStart | 0X00008001 | Simulation Start |
| OVTK_StimulationId_ExperimentStop | 0X00008002 | Simulation Stop |
| OVTK_StimulationId_Label_00 | 0X00008100 | Stimulus for axis change |
| OVTK_StimulationId_Label_01 | 0X00008101 | Stimulus for negative increase |
| OVTK_StimulationId_Label_02 | 0X00008102 | Stimulus for positive increase |
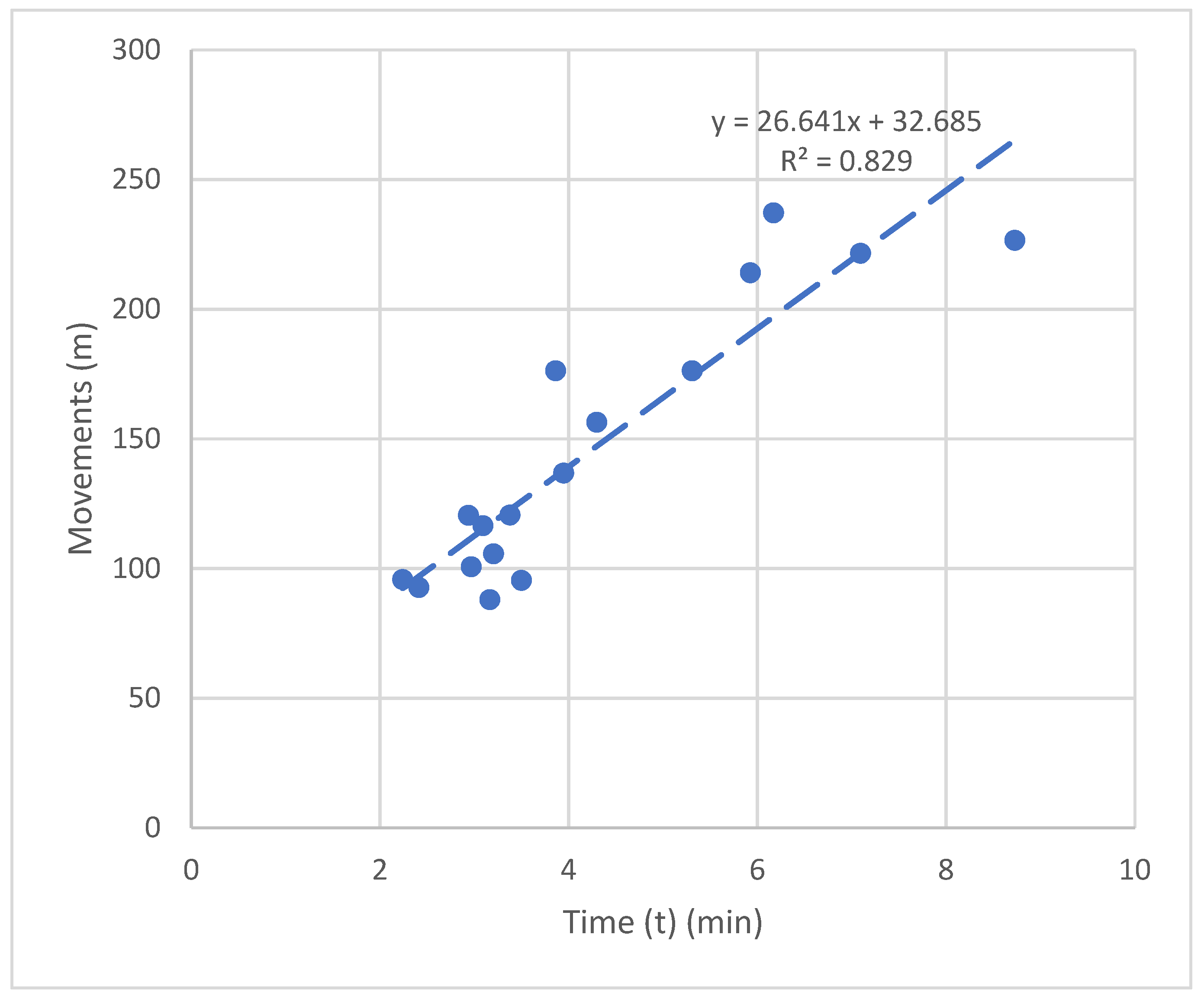
| Target | Anti-Clockwise Rotation (Degrees) | Clockwise Rotation (Degrees) | Theoretical Movements |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 135 | 0 | 45 |
| 3 | 90 | 0 | 30 |
| 4 | 90 | 0 | 30 |
| 5 | 135 | 0 | 45 |
| 6 | 180 | 0 | 60 |
| 7 | 0 | 90 | 30 |
| 8 | 0 | 135 | 45 |
| Total | 285 |
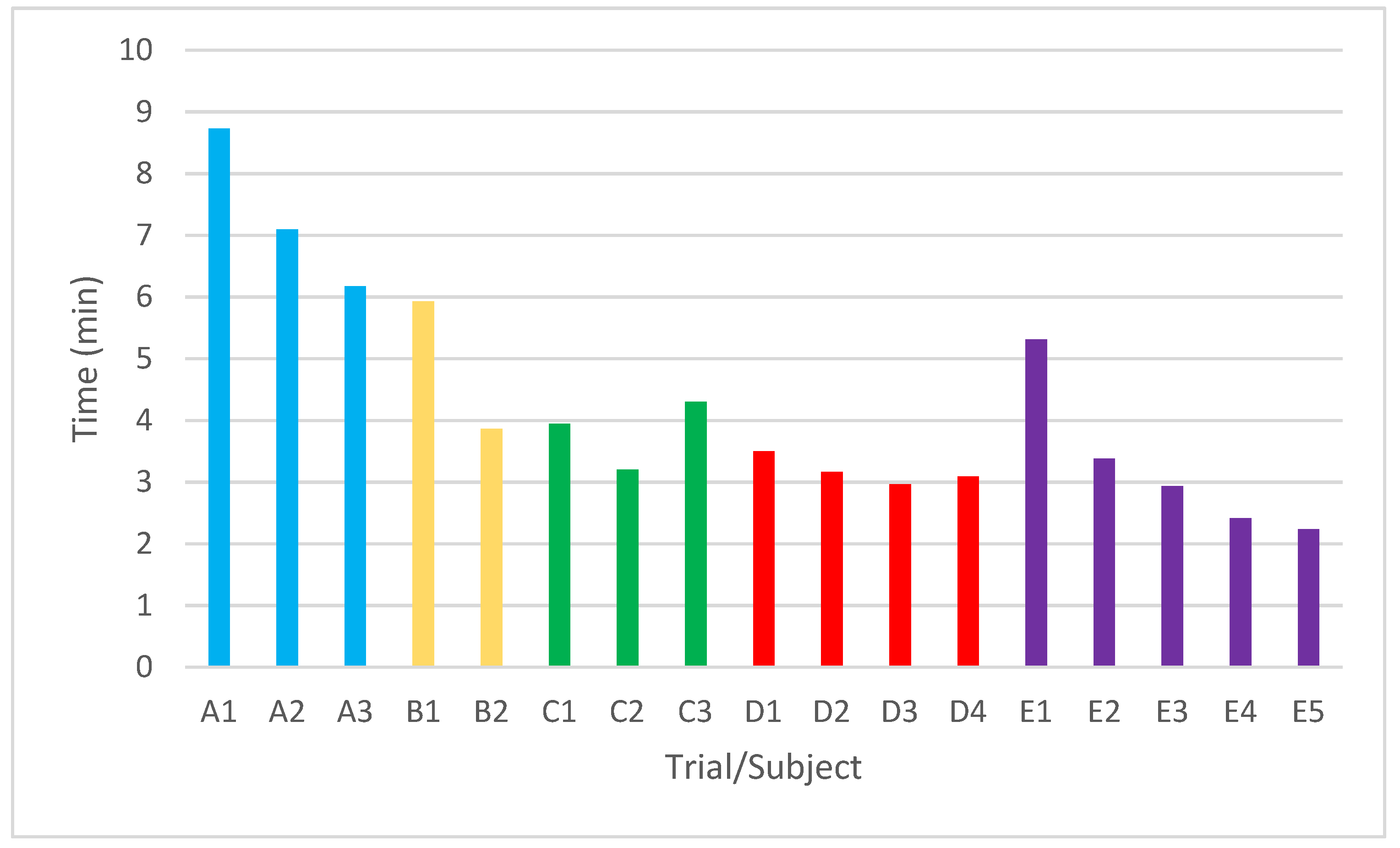
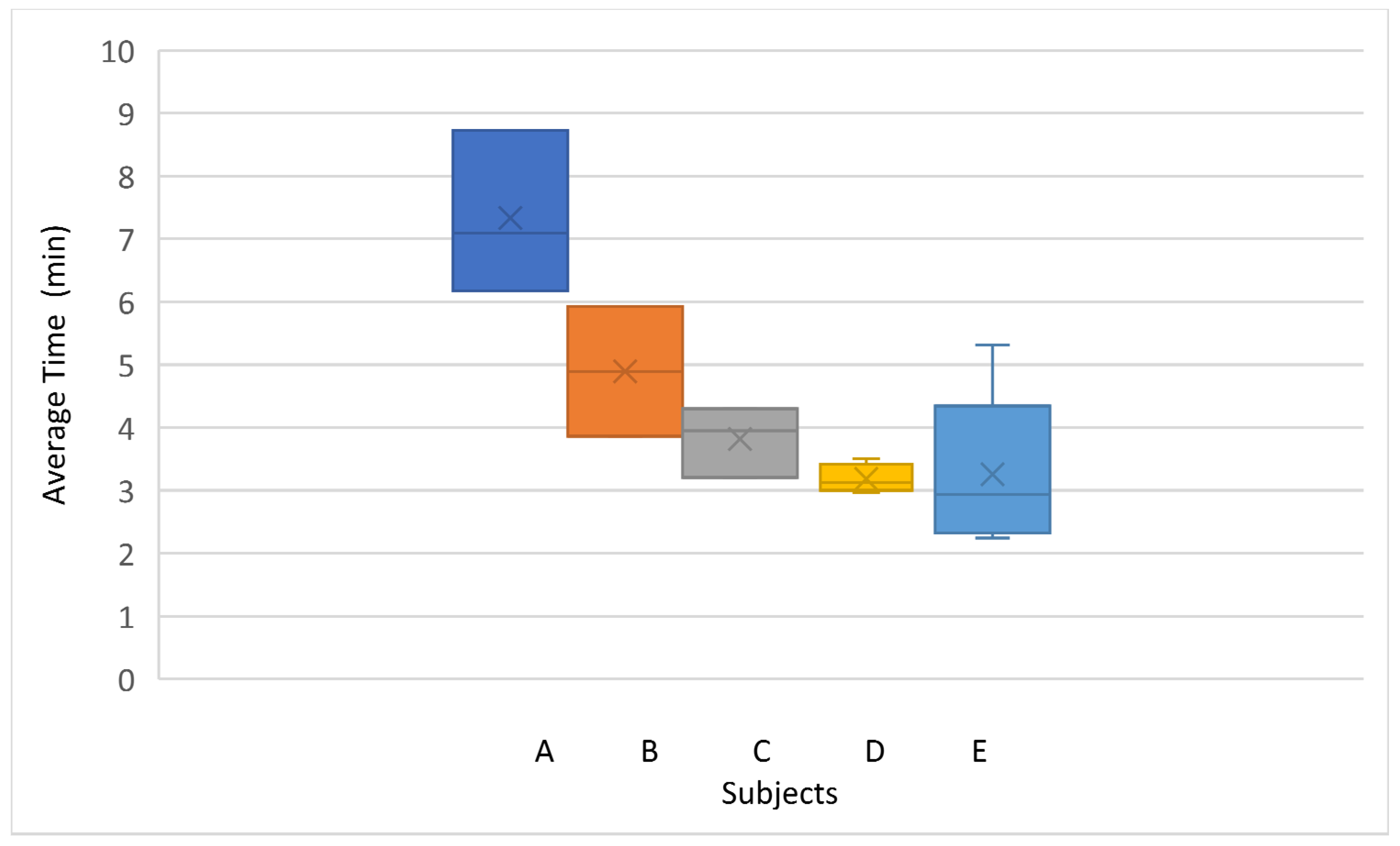
| Subject | Trial Time (min) | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | Average | |
| Subject A | 8.73 | 7.09 | 6.17 | - | - | 7.33 |
| Subject B | 5.93 | 3.86 | - | - | - | 4.89 |
| Subject C | 3.949 | 3.205 | 4.300 | - | - | 3.818 |
| Subject D | 3.501 | 3.165 | 2.967 | 3.093 | - | 3.181 |
| Subject E | 5.310 | 3.379 | 2.939 | 2.414 | 2.241 | 3.257 |
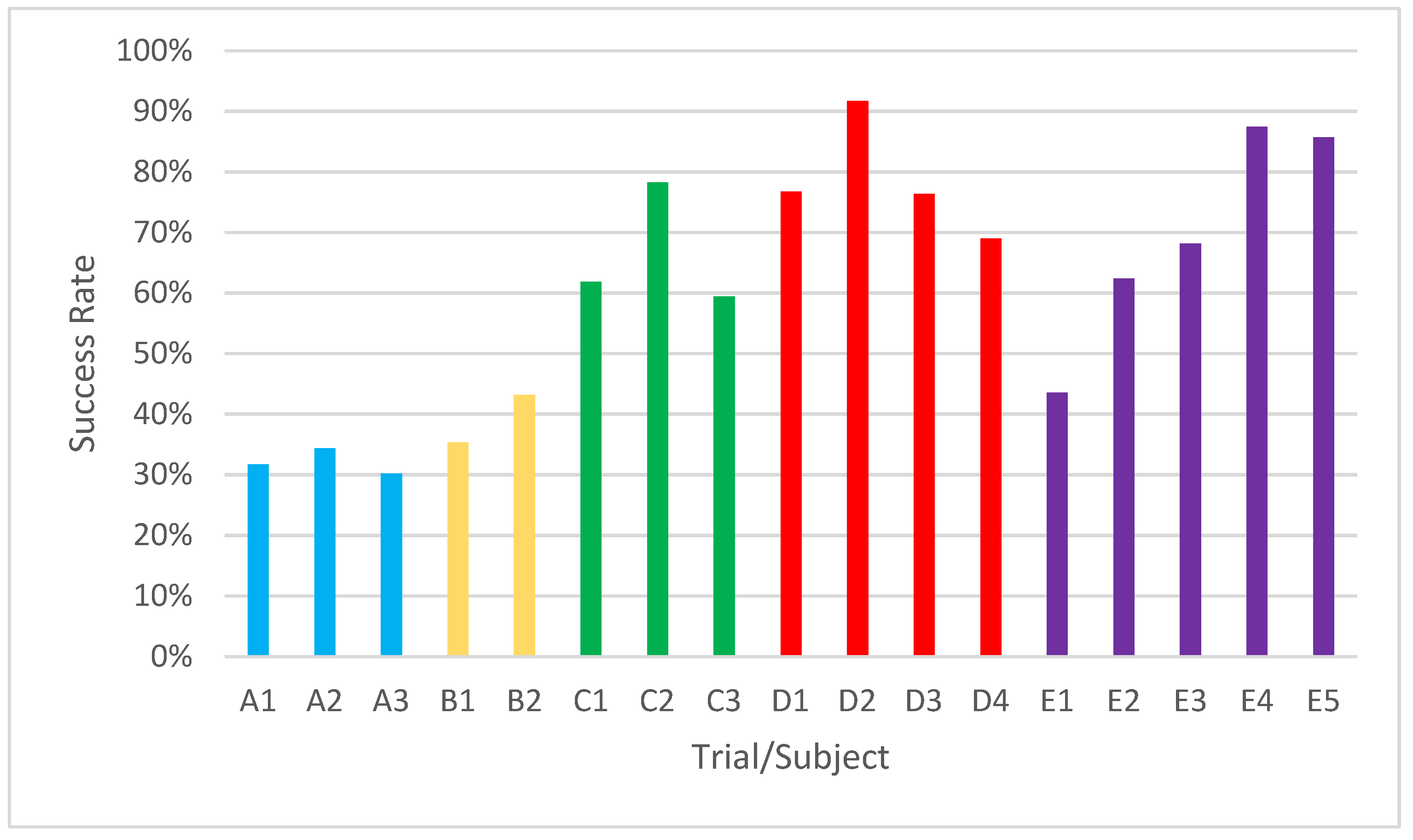
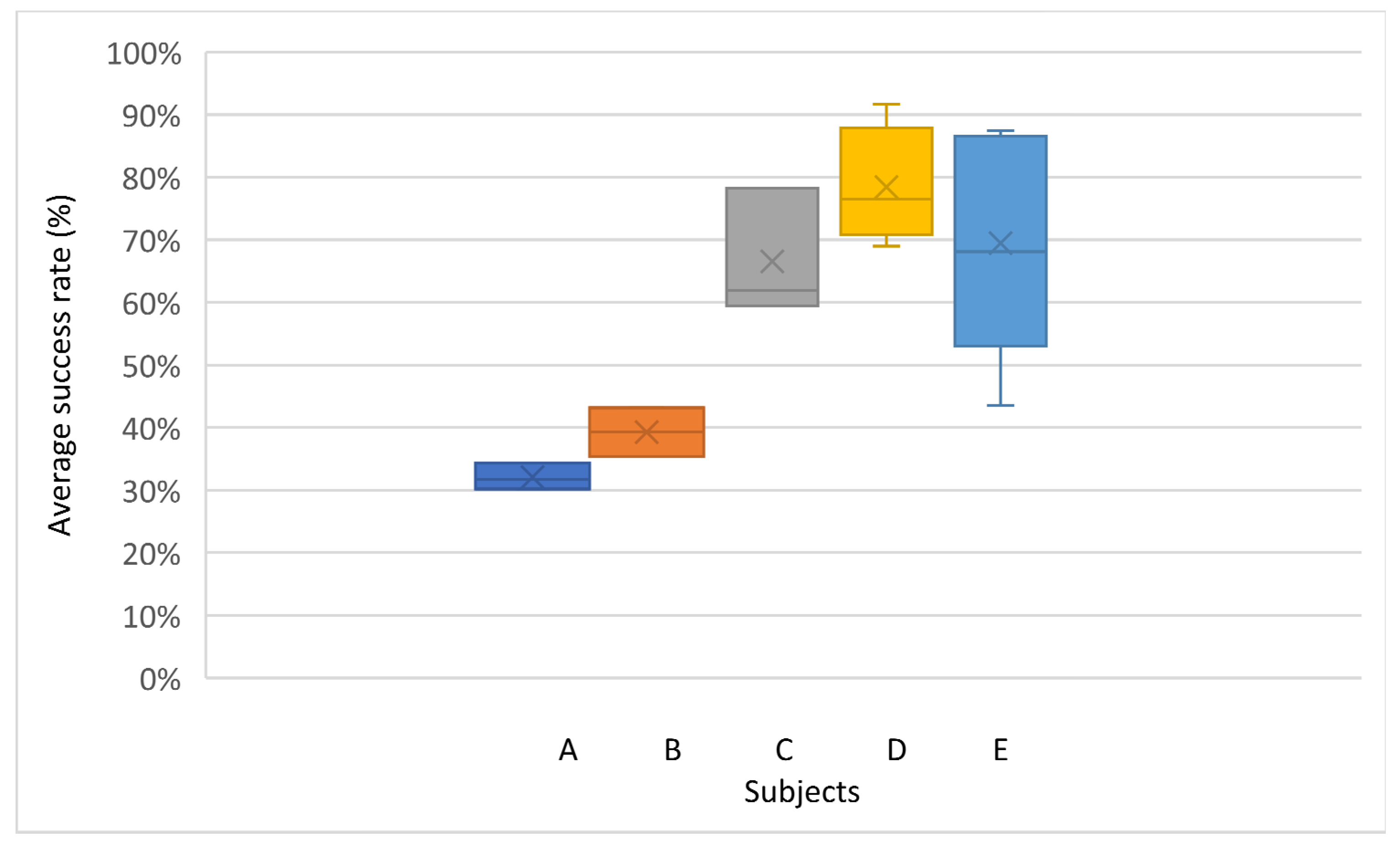
| Subject | Trial Success (%) | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | Average | |
| Subject A | 31.69% | 34.33% | 30.19% | - | - | 32.07% |
| Subject B | 35.32% | 43.18% | - | - | - | 39.25% |
| Subject C | 61.88% | 78.30% | 59.45% | - | - | 66.54% |
| Subject D | 76.73% | 91.68% | 76.38% | 68.98% | - | 78.44% |
| Subject E | 43.56% | 62.42% | 68.14% | 87.50% | 85.70% | 69.46% |
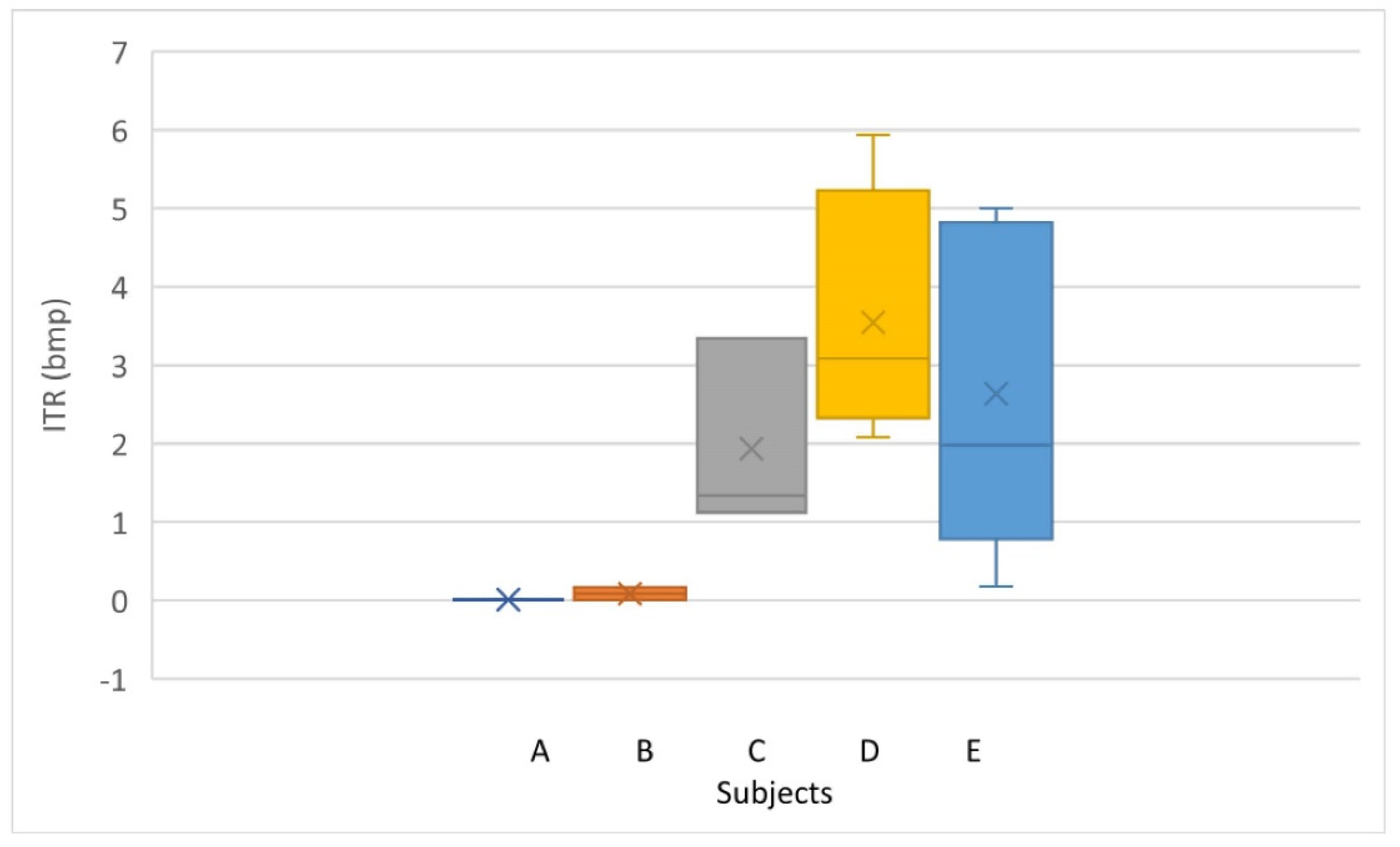
| Subject | Trial ITR (bpm) | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | Average | |
| Subject A | 0.005 | 0.002 | 0.018 | 0.008 | ||
| Subject B | 0.007 | 0.165 | 0.086 | |||
| Subject C | 1.336 | 3.345 | 1.120 | 1.933 | ||
| Subject D | 3.107 | 5.937 | 3.055 | 2.081 | 3.545 | |
| Subject E | 0.178 | 1.386 | 1.982 | 4.999 | 4.635 | 2.636 |
| Laplacian Filter ID | O1 | O2 | OZ | PO3 | PO4 | PZ |
|---|---|---|---|---|---|---|
| LF1 | 1 | 1 | 1 | −1 | −1 | −1 |
| LF2 | 1 | 1 | −2 | 0 | 0 | 0 |
| LF3 | 1 | 1 | 1 | 0 | 0 | 0 |
| Classifier Precision (%) | |||||
|---|---|---|---|---|---|
| Filter | LF1 | LF2 | LF3 | CSP(2) | CSP(8) |
| Subject A | 52.02 | 49.84 | 49.92 | 65.36 | 65.47 |
| Subject B | 41.17 | 37.38 | 37.35 | 60.17 | 61.28 |
| Subject C | 46.57 | 39.53 | 34.92 | 64.4 | 65.74 |
| Subject D | 44.9 | 40.79 | 40.79 | 61.31 | 62.12 |
| Subject E | 43.28 | 45.29 | 45.29 | 67.46 | 68.32 |
| Average | 45.588 | 42.566 | 41.654 | 63.74 | 64.632 |
| Study | Application | Amplifier | Electrodes | Electrodes Placement |
|---|---|---|---|---|
| Present study | Robotic arm | Enobio | 8 | Cz, O1, O2, PO3, Oz, PO4, Pz, reference and ground electrodes in the right ear lobe |
| Al-maqtari et al. [50] | Robotic hand | Ag/AgCl electrodes | 3 | O1, O2, reference electrode in left ear lobe |
| Çiǧ et al. [137] | Robotic arm | Emotiv Epoc Headset | 14 | O1, O2 |
| Pelayo et al. [47] | Robotic arm | Ultracortex | 8 | No information |
| Meattini et al. [51] | Robotic hand | Emotiv Epoc Headset | 14 | O1, O2, P7, P8 |
| Bakardjian et al. [103] | Robotic arm | Biosemi | 128 | 12 occipital channels |
| Chen et al. [48] | Robotic arm | Neuracle | 9 | PZ, PO5, PO3, POZ, PO4, PO6, O1, OZ, O2, ground between FZ-FPZ |
| Cáceres et al. [101] | Robotic arm | Emotiv Epoc Headset | 14 | O1, O2 |
| Chen et al. [46] | Robotic arm | Neuracle | 10 | P3,PZ,P4,PO3,PO4,T5,T6,O1,OZ,O2, ground between FPZ and FZ, reference electrode CZ |
| Sandesh et al. [37] | Robotic hand | Ag/AgCl electrodes | No information | No information |
| Karunasena et al. [39] | Wrist and robotic gripper arm | BioRadio | 1 | Oz (Cz - FPz = Ground-Reference) |
| Sharma et al. [40] | Robotic arm | Enobio | 32 | Oz-Pz-Fp1 |
| Zhang et al. [42] | Robotic arm | DSI | 24 | P3,P4,Cz,T5,T6,O1,O2 |
| Chen et al. [41] | Robotic arm | NeuSen W8 | 8 | T5, P3,PZ, P4, T6,O1, Oz, O2 |
| Lin et al. [43] | Robotic arm | Mindo 4S | 4 | O1, O2 |
| Kaseler et al. [44] | Robotic arm | EEG amplifier | 9 | P3,Pz, P4, PO3, POz, PO4, O1, Oz, O2 |
| Tabbal et al. [45] | Robotic arm | OpenBCI | 8 | O1, O2, Oz |
| Chiu et al. [138] | Robotic arm | Mindo 4S | 4 | O1, O2 |
| Study | Frequencies (Hz) | Screen | Stimuli Color | Subjects | Session/Block (Trials) |
|---|---|---|---|---|---|
| Present study | 12, 15, 20 | LCD monitor | White/Black | 5 | 32 |
| Al-maqtari et al. [50] | 8, 13 | LED | Red | 2 | 30 |
| Çiǧ et al. [137] | 6.66, 7.5, 8.57, 10, 12 | No information | No information | 11 | No information |
| Pelayo et al. [47] | 7, 11, 15 | LED | No information | 3 | 30 |
| Meattini et al. [51] | 6, 7.5, 10 | LCD monitor | White/Black | No information | No information |
| Bakardjian et al. [103] | Exp1: 5-12 Exp2: 5-5,4-6-6,7-7,5-8,5-10-12 | LCD monitor | Videos | 8 | No information |
| Chen et al. [48] | From 8 to 15.2 in 0.3 Hz steps | LCD monitor | Blue | 4 | 4 session—25 trials |
| Cáceres et al. [101] | 6-4, 3-5 | LCD monitor | Red-Blue-Purple | 6 | No information |
| Chen et al. [46] | 8–15 Hz in 0.5 Hz steps | LCD monitor | No information | 12 | No information |
| Sandesh et al. [37] | 21 Hz | LED | No information | 5 | 2 session—5 trials |
| Karunasena et al. [39] | 6.5, 7.5, 8.2, 9.3 | LED | White | 3 | 30 s at each stimulus frequency |
| Sharma et al. [40] | 15 | Laptop | Square | 1 | 30 s at each fixation targets |
| Zhang et al. [42] | 9, 9.25, 9.5, 9.75, 10.25, 10.5, 10.75, 11, 11.25, 11.5, 11.75, 12 | LCD Monitor | Images | 20 | 400 trials |
| Chen et al. [41] | 9, 9.5, 10, 10.5, 11, 11.5, 12, 12.5, 13, 13.5, 14, 14.5 | Laptop | White Name | 8 | 5 blocks of 12 trials |
| Lin et al. [43] | 14.4, 16, 18, 20.6, 24 | Monitor | Circles—Black and white | 15 | 3 blocks of 5 trials |
| Kaseler et al. [44] | 8, 57, 10, 12, 15 Hz, 7.96 to 14.86 steps 0.46 Hz | LCD Monitor | Square | 2 | 20 trials in each test |
| Tabbal et al. [45] | 7.5, 10, 12 | No information | Red/blue | 5 | 4 blocks of 8 trials |
| Chiu et al. [138] | 14.4, 16, 18, 20.6, 24 | Monitor | Circles—Black and white | 15 | 3 blocks of 5 trials |
| Study | Feature Extraction/ Classification | Accuracy |
|---|---|---|
| Present study | Band power (BP) Linear discriminant analysis (LDA) | The average precision was 60.9%, in a range between 30.19% and 91.68%. The average of three of the five subjects was 85.83% |
| Al-maqtari et al. [50] | FFT, Power Density Spectrum (PDS) | No information |
| Çiǧ et al. [137] | Hilbert transform (HT) and Multi wavelet transform (MWT) Neural Network and cubic-Support vector machine (SVM) | 90% |
| Pelayo et al. [47] | FFT, SNR | 85.56% |
| Meattini et al. [51] | Band power (BP) Support vector machine (SVM) | The accuracy of reading four states was just under 90%, which is acceptable for the application of gesturing. |
| Bakardjian et al. [103] | Independent Component Analysis (ICA) and phase-locking value (PLV) Linear discriminant analysis (LDA) | No information |
| Chen et al. [48] | Canonical correlation analysis (CCA) | 95.50 ± 3.00% |
| Cáceres et al. [101] | FFT, Power spectral density (PSD) | 91.65 ± 9.13% |
| Chen et al. [46] | Canonical correlation analysis (CCA) | 92.78% |
| Sandesh et al. [37] | Wavelet LDA | Accuracy 84% and completion time 44.6 seg |
| Karunasena et al. [39] | FFT Euclidean distance | Accuracy between 29.6% and 61.8% |
| Sharma et al. [40] | FFT | Accuracy 79% |
| Zhang et al. [42] | CCA (Canonical Correlation Analysis) Adaptative FBCCA/Bayesian estimation | Accuracy 95.5% |
| Chen et al. [41] | CCA (Canonical Correlation Analysis) | Accuracy between 76.67% and 98.33% |
| Lin et al. [43] | FFT, SNRCCA | Acurracy 90% |
| Kaseler et al. [41,44] | No information | Accuracy between 60% and 100% |
| Tabbal et al. [45] | Welch power spectral density/FFT/Singular Value Decomposition (SVD) SVM | The accuracy of the three methods is between 50% and 98.75% |
| Chiu et al. [138] | FFT, SNR CCA | Accuracy 91.35% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quiles, E.; Dadone, J.; Chio, N.; García, E. Cross-Platform Implementation of an SSVEP-Based BCI for the Control of a 6-DOF Robotic Arm. Sensors 2022, 22, 5000. https://doi.org/10.3390/s22135000
Quiles E, Dadone J, Chio N, García E. Cross-Platform Implementation of an SSVEP-Based BCI for the Control of a 6-DOF Robotic Arm. Sensors. 2022; 22(13):5000. https://doi.org/10.3390/s22135000
Chicago/Turabian StyleQuiles, Eduardo, Javier Dadone, Nayibe Chio, and Emilio García. 2022. "Cross-Platform Implementation of an SSVEP-Based BCI for the Control of a 6-DOF Robotic Arm" Sensors 22, no. 13: 5000. https://doi.org/10.3390/s22135000
APA StyleQuiles, E., Dadone, J., Chio, N., & García, E. (2022). Cross-Platform Implementation of an SSVEP-Based BCI for the Control of a 6-DOF Robotic Arm. Sensors, 22(13), 5000. https://doi.org/10.3390/s22135000