1. Introduction
The humidity in daily life refers to relative humidity (RH), which means the percentage of the amount of water vapor contained in the air and the amount of saturated water vapor that can exist in the air under the same conditions [
1]. Humidity detection plays an important role in agricultural production, meteorology, chemical processing, food storage, medical identification, and structural health monitoring [
2,
3]. In recent years, many optical fiber sensors have been studied and reported due to their anti-electromagnetic interference, fast response, and high sensitivity [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. These sensors are based on a variety of structures, such as the fiber Fabry–Perot interferometer (FPI) [
4], fiber tip [
5], fiber Bragg grating [
7,
8], Mach–Zehnder tapered-fiber interferometer [
9], and Michelson interferometer [
10].
Among them, the FPI has important application prospects due to its compact structure and easy fabrication [
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. To further improve RH sensitivity, the FP cavity is usually made of hygroscopic material. Yang et al. used Al
2O
3 film to form a FP cavity for sensitivity enhancement [
12]. Their work found FP constructed by all hygroscopic material could obtain higher sensitivity for efficient use of coefficient of expansion of hygroscopic material [
13,
14]. A study by Zhang et al. presented the spider dragline silk-based RH sensor and the RH sensitivity could be average 17.2 nm/%RH form range of 58–98 %RH [
15]. Research shows that the shorter the FP cavity length, the higher the sensitivity of the sensor [
16]. Therefore, sensors are usually prepared as a thin-film FP with a typical thickness below 50 μm [
4,
14]. Another method to improve sensitivity is using TVE by connecting two FP cavities together. If the optical path length (
OPL) matching condition is met, i.e., the
OPLs of the two FPs are sufficiently close but not equal, their spectra are superimposed to generate a new spectrum with an envelope. The period of this envelope is the least common multiple of the two FPs. The sensitivity can be amplified times the least common multiple by spectral tracking of the envelope. These two FPs in TVE FPI can be arranged by both cascaded and parallel structure [
21,
22]. However, a thin-film sensing FP is usually accompanied by an additional air FP cavity in fabrications [
21,
23], which will break the
OPL matching condition of TVE, and lead in information aliasing if parallel structure is used. The use of the cascaded structure and the rational use of the air cavity as the reference cavity in the thin-film FPI can realize a TVE FPI with sensitivity amplification. However, high sensitivity magnification is still usually limited in the TVE FPI.
Firstly, the TVE has a very harsh
OPL matching condition. According to this matching principle, the magnification factor (
M-factor) of the sensitivity can be defined as the free spectral range (FSR) ratio between the envelope of the TVE spectrum and the spectrum of the sensing FP. This is defined as follows [
23]:
where
Lx and
nx (
x = 1, 2) are the length and refractive index of reference cavity FP1 and sensing cavity FP2, respectively, and Δ is defined as the
OPL mismatch between the two FPs. It can be seen in Equation (1) that the smaller the Δ, the bigger the
M. However, in a practical preparation process, such as fiber cleaving, splicing, and etching, machining error is inevitably induced, resulting in the
deviating from the designed value and a reduction of the
M-factor.
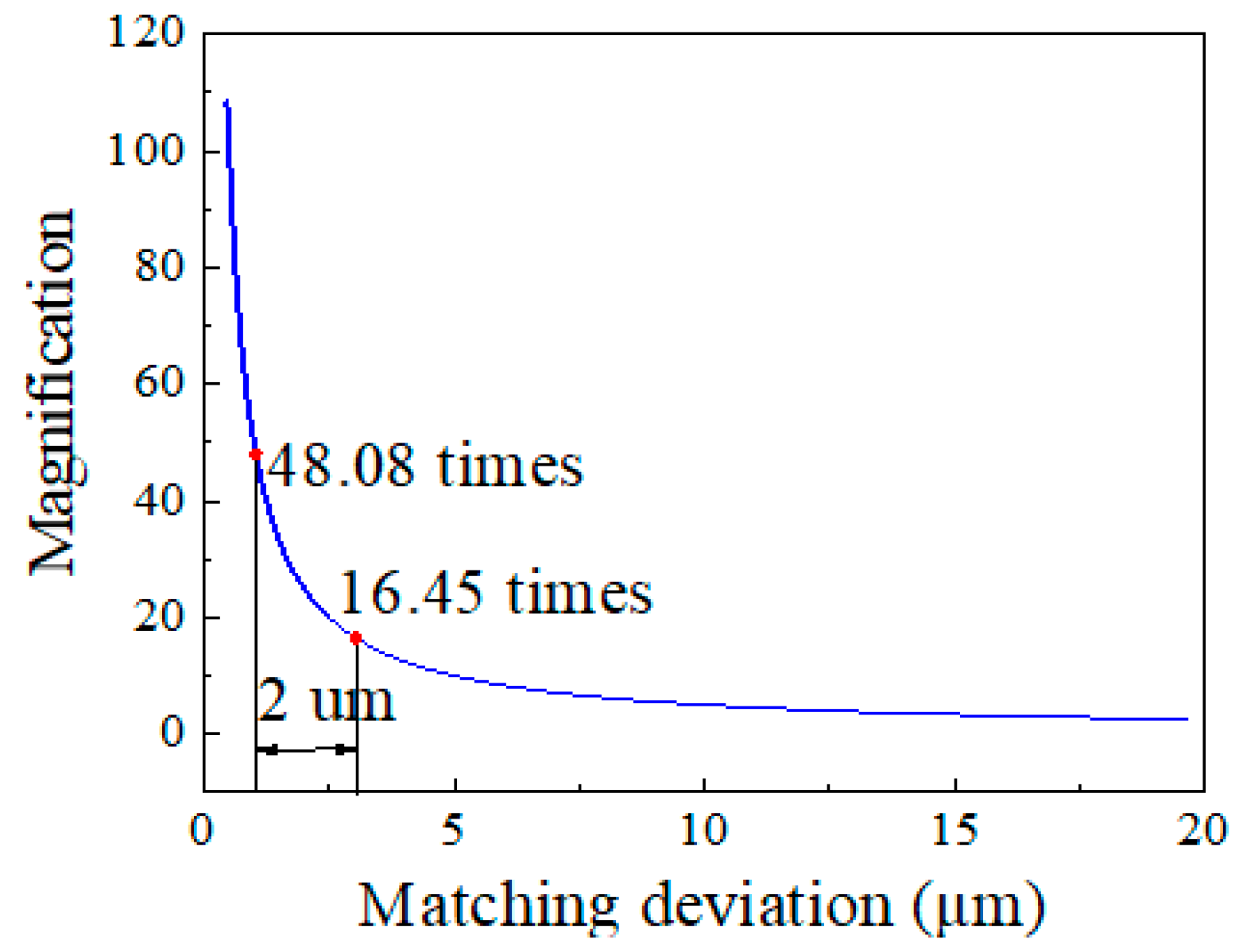
As an example, we consider a cascaded cavity TVE FPI. If the
OPL of the sensing cavity is 50 μm and the preset
M-factor is 48.08 times, the Δ should be 1.04 μm, according to Equation (1). However, if the machining error of 2 μm is induced, the
M-factor will be reduced from 48.08 times to 16.45 times, which is only 34.2% of the ideal state, shown in
Figure 1. The high
M-factor usually needs a Δ under a sub-micron level, however, in the actual process, the micron-level error is hard to avoid, so most of the
M-factor of the TVE FPI is less than 30 times [
22,
23,
24,
25,
26]. Second, an ultra-high-sensitivity TVE FPI is also limited in the demodulation method using envelope tracking. The TVE FPI needs to identify the extreme point of the envelope as a tracking point, so there must be at least one full-period envelope in the visible range of demodulation instrument. However, the thin-film FP has a large FSR (e.g., an agar FP with an FSR of 127 nm [
4]). Therefore, even if ideal
OPL matching is achieved, the FSR of the envelope will be further enlarged and be far beyond the wavelength range of the broadband light source (e.g., the broadband light source: Fiber Lake, ASE light source, wavelength range: around 450 nm), resulting in a failed measurement.
Recently, a new theory of harmonic Vernier effect (HVE) has been reported [
27,
28], which could further magnify the envelope sensitivity by
i times compared with TVE. It could be achieved by increasing the
OPL of first interferometers by a multiple (
i-times) of
OPL of the second interferometer. Since the magnification is multiplied by the basic magnification and the
i order, the ideal magnification could be more easily obtained with higher fabrication tolerance. A gas pressure sensor reported by Wu recently verified the theory of HEV [
29]. Such a practical theory has not been applied to a cascaded FP structure to enhance the RH sensitivity.
In this work, an ultra-high-sensitivity thin-film (chitosan) RH fiber sensor based on the HVE in a cascaded FPI is proposed and demonstrated. Different from that of the TVE FPI, the M-factor of the proposed HVE FPI not only depends on Δ, but also the harmonic order. Therefore, a high M-factor can be easily achieved by increasing the harmonic order. This characteristic also results in greater OPL matching tolerance, resulting in easier and more convenient realization of an ultra-high-sensitivity HVE FPI compared to that of a TVE FPI. For the demodulation, we use the internal envelope fitting method to track the intersection of the internal envelope, which solves the problem of the invisible envelope extreme point caused by the large FSR. Experimental results show that the proposed sensor can achieve an M-factor of more than 50 times for RH sensing. The method provides a good reference for high-sensitivity sensing in the fiber sensing field.
2. Experimental Setup and Working Principle
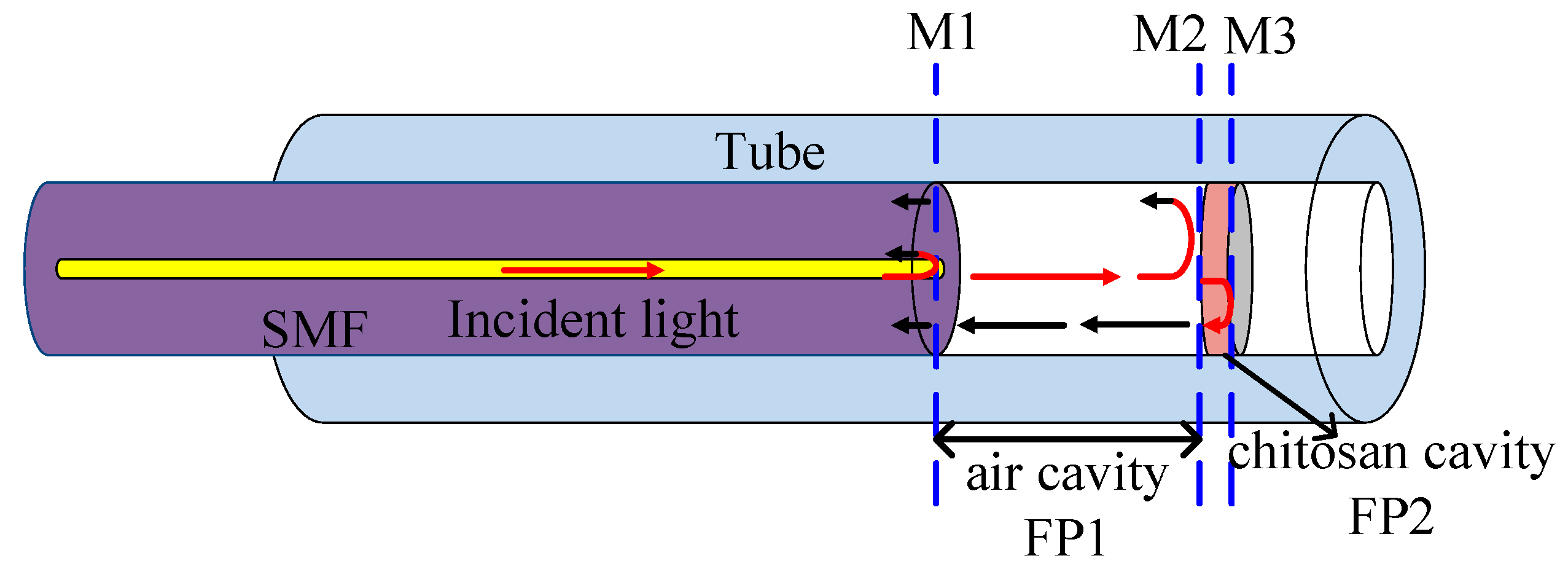
A schematic diagram of the proposed HVE FPI sensor is shown in
Figure 2. The HVE FPI sensor includes a single-mode fiber (SMF), a chitosan film, and a fiber tube. Because of the different refractive indexes, there are three reflective surfaces, labeled M1, M2, and M3. The chitosan cavity, FP2 (M2–M3), is the sensing cavity (
n2 = 1.52), and the air cavity, FP1 (M1–M2), is the reference cavity (
n1 = 1).
Since the reflectivity at each reflecting surface is less than 4%, the reflection beam can be simplified as three-beam interference. The total reflected intensity can be expressed as follows [
21]:
where
In Equation (3), is the reflectivity of three surfaces; is the loss of the reflector; and are the phase delay of FP1 and FP2, respectively; and λ is the wavelength in vacuum.
To study the formation mechanism of HVE FPI and discuss the
OPL matching condition of FP1 and FP2, it is assumed that
OPL1 >
OPL2 with the following relationship [
28]:
where
i is an integer defined as the harmonic order of HVE. The harmonic order
i depends on the ratio of the two FP
OPLs and is expressed as follows:
where the mathematical symbol
indicates the rounding down of
X. When
, according to the
OPL relationship, although the TVE condition is not met, the (
i + 1) times
FSR1 is similar to the
FSR2, so there is still a least common multiple between two FPs. The total spectrum function of the sensor can be rearranged as follows [
18]:
where
and the
term corresponds to the low-frequency envelope. The term of
corresponds to the high-frequency fringes (HFFs), which are modulated by
. Moreover,
also determines the phase information of the upper envelope, which will be discussed in detail in
Figure 3. Therefore, the upper envelope function of the reflection spectrum superposed by all terms can be given as follows:
where
m is the amplitude.
According to Equations (4) and (5), both
i and Δ can be adjusted by tuning the
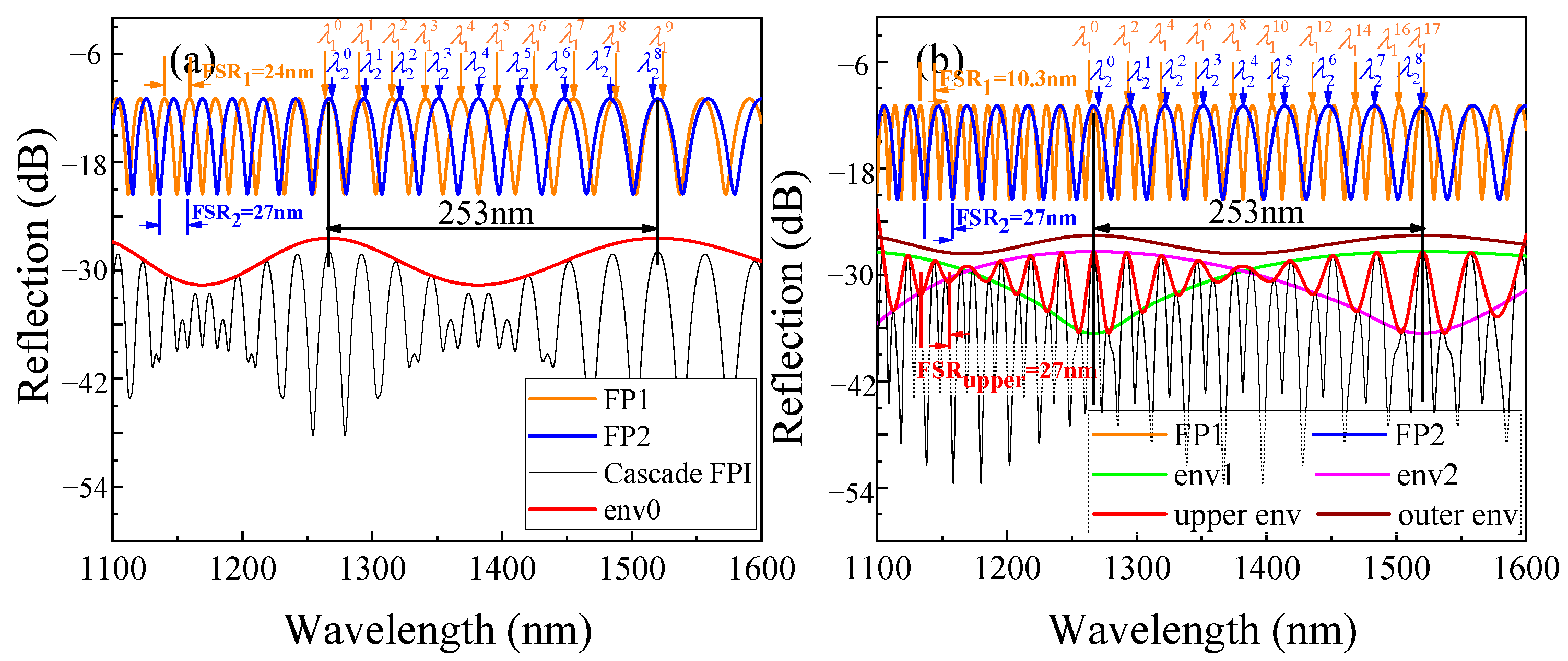
OPL ratio between FP1 and FP2. To investigate the difference between TVE and HVE FPIs, a different
OPL ratio is chosen and studied. The calculated spectra for individual FP1 and FP2 at
i = 0 (
L1 = 34.2 μm,
L2 = 20 μm, and Δ = 3.8 μm) are shown in
Figure 3a. The wavelengths of the different peaks are labeled as
, where
p = 1, 2 is the number of the FP and
k is the number of the peak. The FSRs of two FPs are close (FSR
1 = 24 nm, FSR
2 = 27 nm), and the magnification k of the least common multiple of the two FPs is the peak number between two overlapped peaks of the two FPs. The wavelength relationship of overlapped peaks can be expressed as follows:
where
(in the calculation,
k = 8).
Figure 3a also shows the entire calculated spectrum of the cascaded FPI, wherein there is a large envelope (labeled as env0) from fitting all HFF peaks in turn. This is the typical TVE spectrum. The expression for the
FSR of env0 is [
27,
28]:
The TVE FPI will evolve into HVE FPI if
i > 0. We increased the length of
L1 to 64.6 μm, thus
i = 1 and Δ remain as 3.8 μm.
Figure 3b shows the spectra of FP1, FP2, and cascaded HVE FPI. Now,
FSR1 becomes 10.3 nm and the wavelength of the overlapped peaks of FP1 and FP2 can be expressed as follows:
where
. If we fit all the HFF peaks of cascaded FPI spectrum in turn, an upper envelope will be obtained, which differs from env0 of the TVE shown in
Figure 3a. The FSR of the upper envelope is 27 nm, which is exactly consistent with that of FP2 and Equation (7). If we further fit the peaks of the upper envelope, an outer envelope with the same FSR as env0 of TVE will be obtained. The expression for the FSR of the outer envelope is [
27,
28]:
Another remarkable difference from TVE spectrum is that if we fit the HFF peaks with two peaks as intervals, there are two obvious internal envelopes with the same FSR, which is twice as much as that of the outer envelope. A 1-order HVE FPI spectrum is obtained, as shown in
Figure 3b. We can find that there are three HFFs in an upper envelope period in this spectrum. At the same time, there are two obvious internal envelope curves obtained by taking points at intervals. Moreover, the FSR of the inner envelope is twice that of the outer envelope.
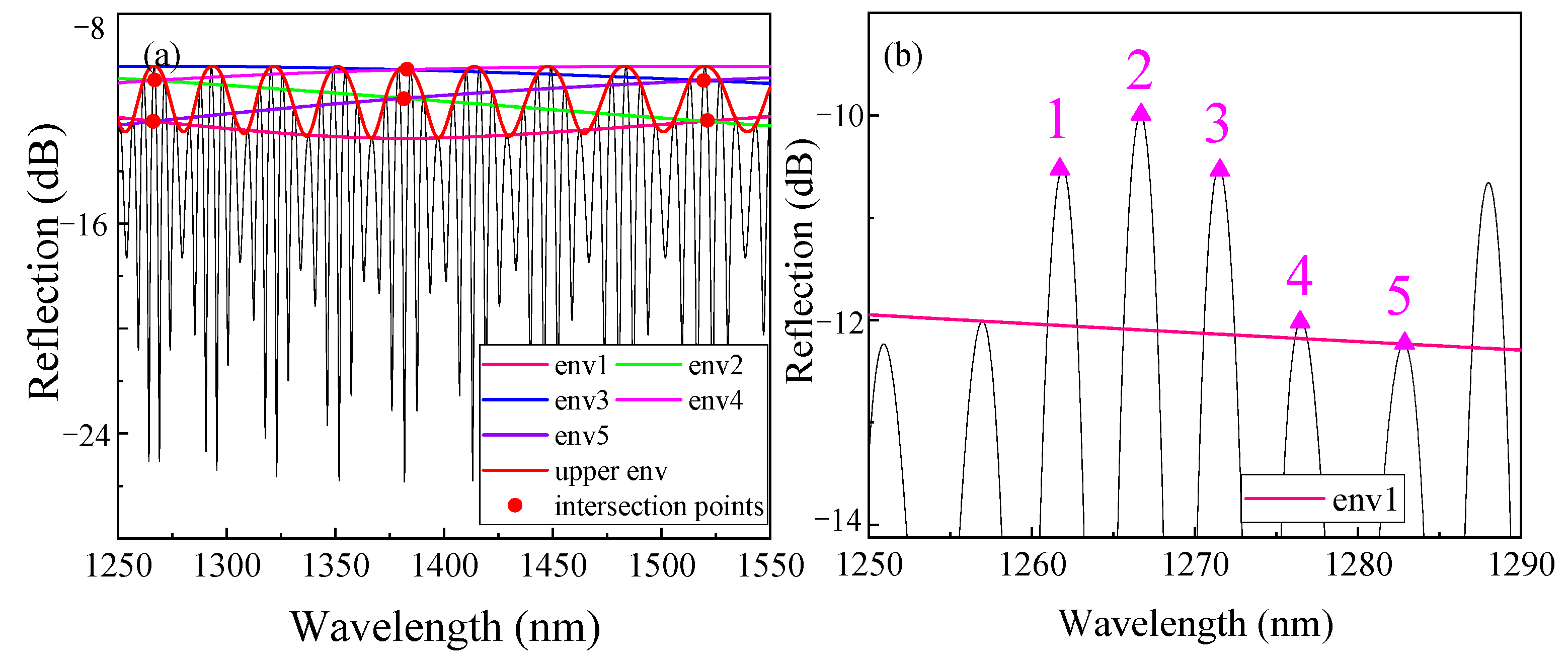
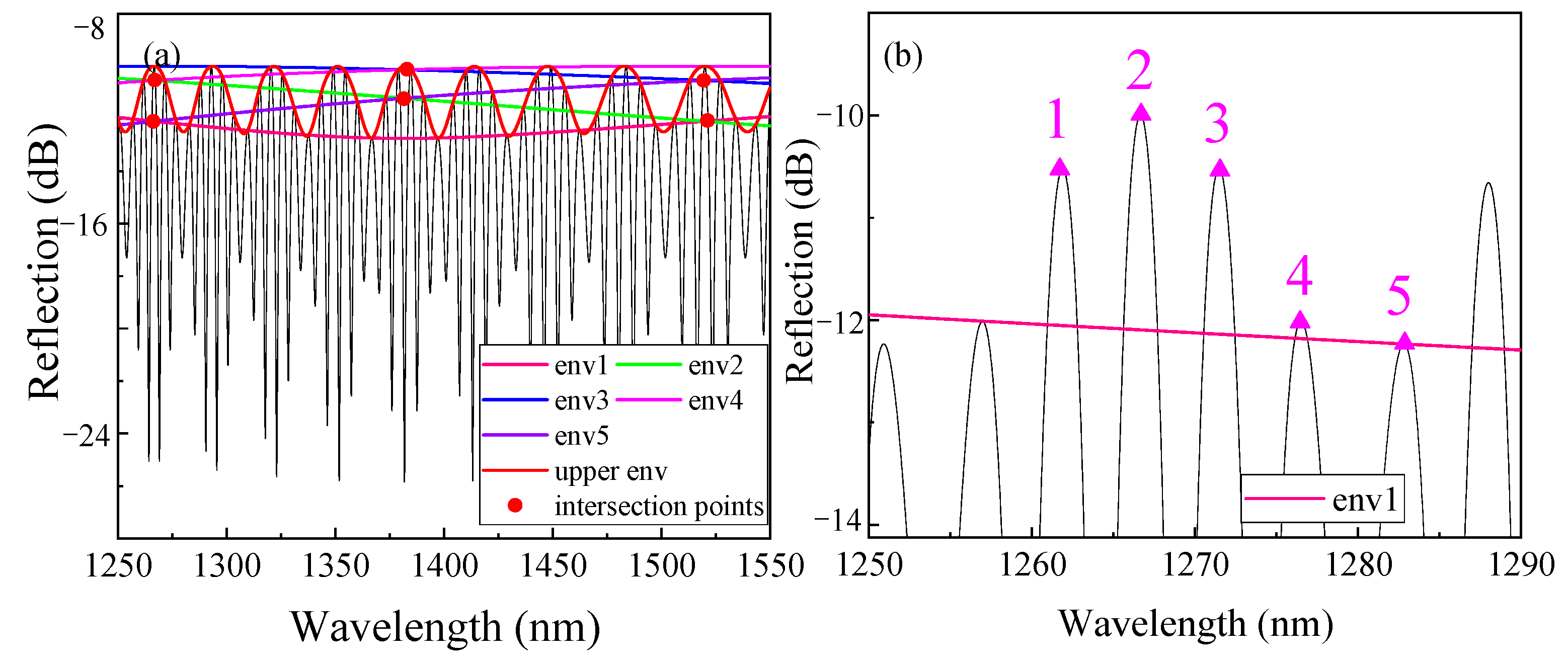
For a more comprehensive understanding of the formation of the inner envelope, we continued to increase the length of
L1. For example,
Figure 4a shows 4-order HVE FPI spectrum, in which
L1 = 155.8 μm (
i = 4, Δ = 3.8μm), and there are six HFFs in an upper envelope period. We take these fringe peaks as the starting point and take points at an interval of five points for envelope fitting. In
Figure 4b, five inner envelope curves appear (the inner envelope curve starting from the first HFF coincides with the line starting from the sixth). It is not difficult to find that for the
i-order HVE FPI, (
i + 1) internal envelopes can be obtained by fitting the HFF peaks with (
i + 1) peaks as intervals. The FSR of the internal envelope is (
i + 1) times that of the outer envelope, which can be expressed as [
28]:
The simulation spectrum shows that when the internal envelope FSR is too large to track, there are still many intersection points of the internal envelope. These intersection points can be selected as the visible tracking points so that the demodulation is no longer limited by the large FSR, thus solving the problem in TVE FPI demodulation.
The
M-factor of
i-order HVE FPI can be redefined as the FSR ratio of the internal envelope to the spectrum of the sensitive cavity FP2, expressed as:
Therefore, according to Equations (1) and (13), even with the same Δ, the
M-factor of HVE FPI can be (
i + 1) times the TVE FPI, while the tolerance of machining error for
i is far greater than that of Δ. This is because the interval of
i in the
OPL of FP2 is usually tens of microns, while the Δ is usually micron- or submicron-level, as mentioned before. It should be noted that in the cascaded FPI, the sensitivity of the upper envelope reflects the sensitivity of FP2 [
12], so the
M-factor of HVE FPI in experiment can be obtained through dividing sensitivity of the internal envelope or intersections by the sensitivity of the upper envelope.
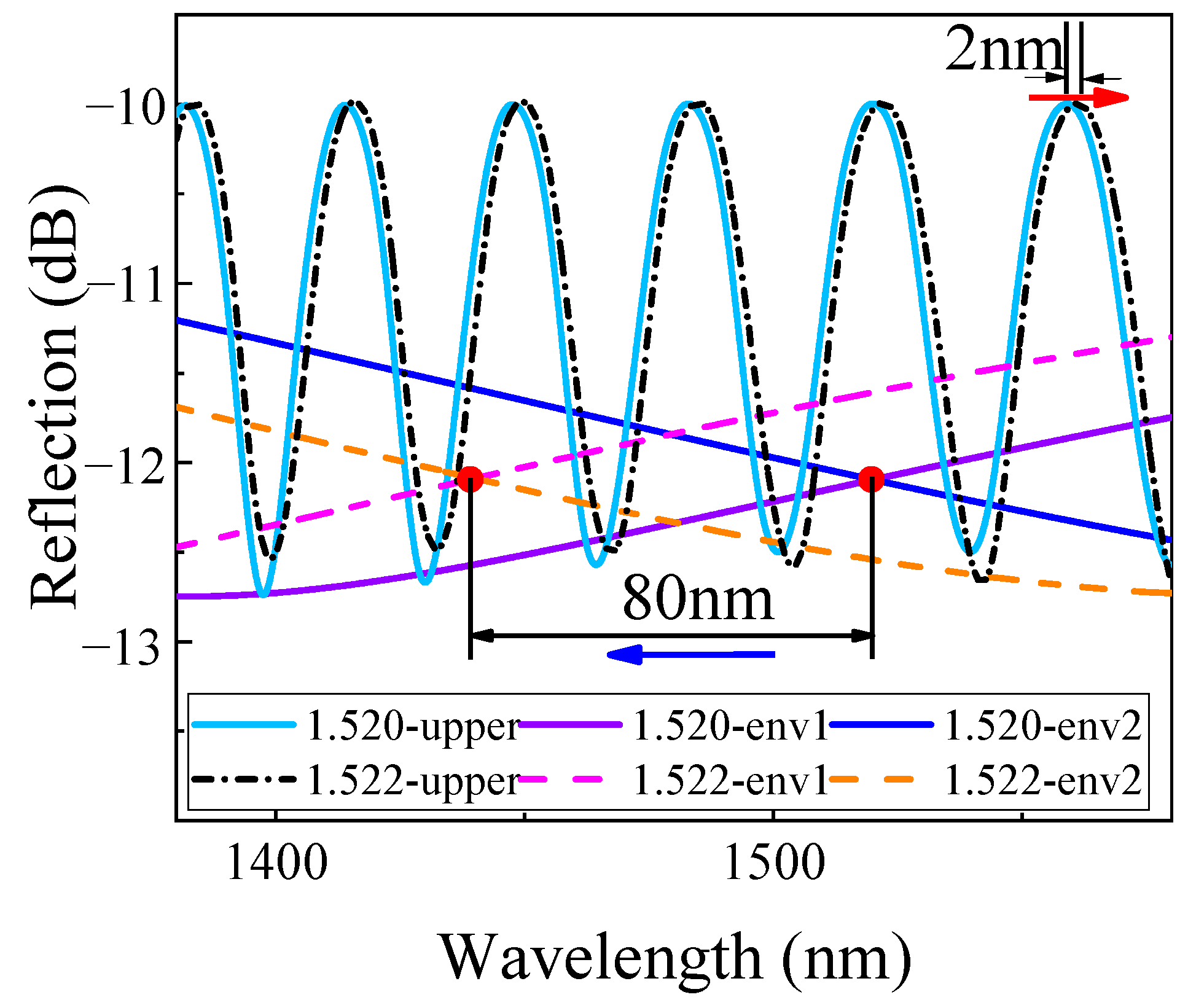
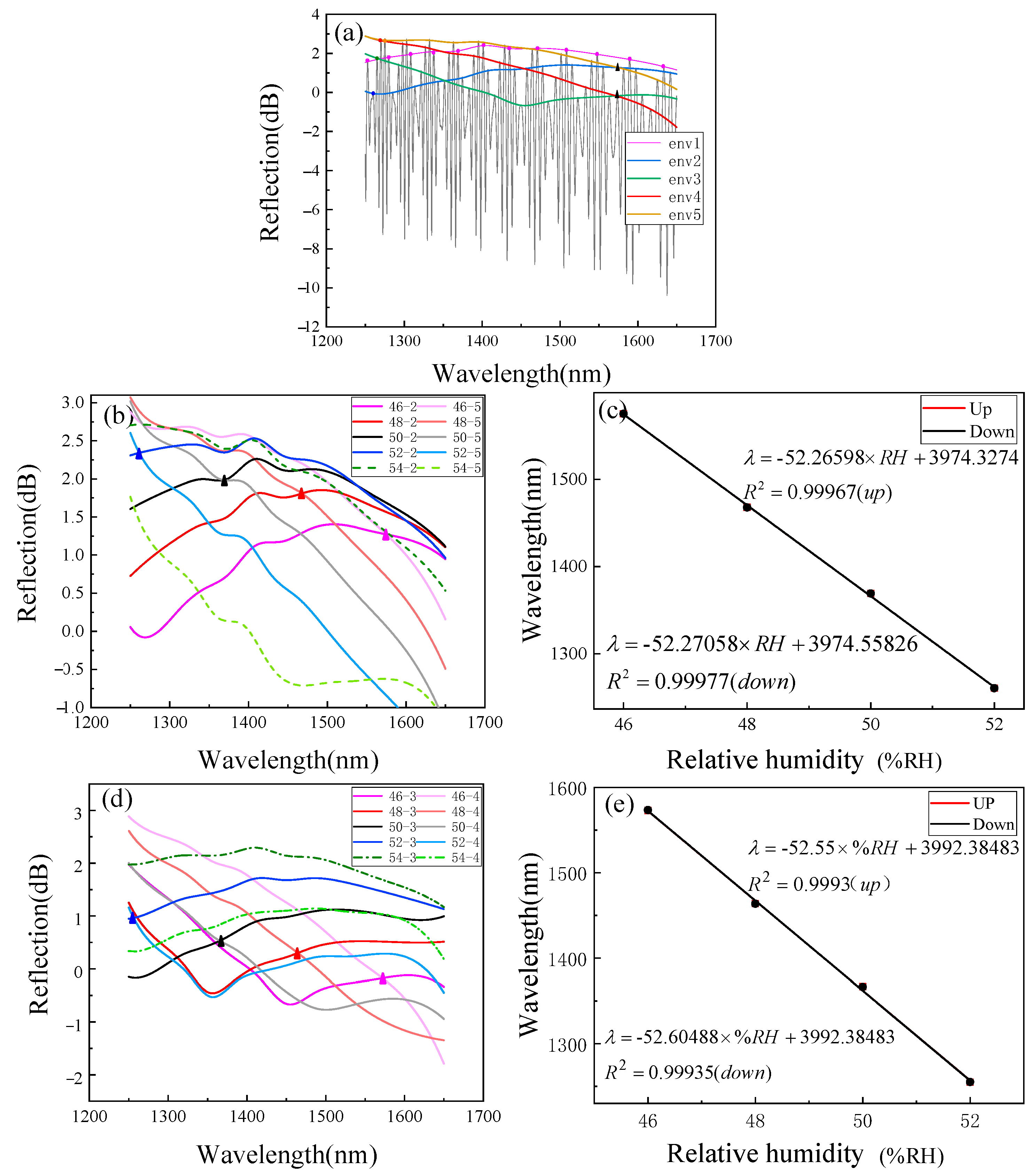
Figure 5 shows the spectral change of upper and internal envelopes when n
2 changes from 1.520 to 1.522. It can be seen that the upper envelope drifts 2 nm, while the internal envelope intersection (env1 and env2) drifts −80 nm, making an
M-factor of −40 times, which is consistent with Equation (13).
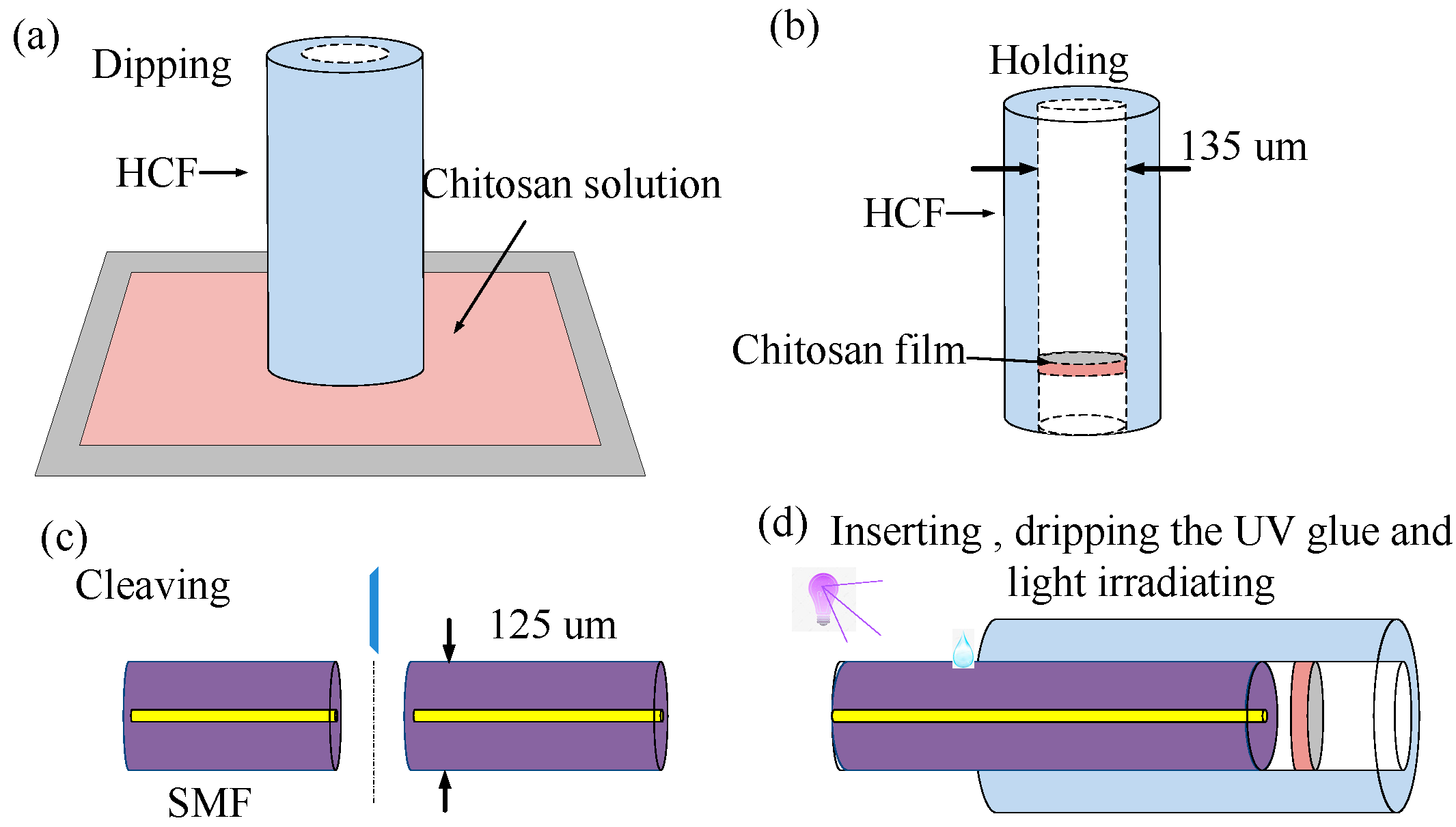
The fabrication method of the proposed sensor is shown in
Figure 6. We prepared a 1% concentration of chitosan (C105803, Aladdin Reagent (Shanghai) Co., Ltd, Shanghai, China) acetic acid (A116166, Aladdin Reagent (Shanghai) Co., Ltd, Shanghai, China) solution and dipped an HCF (TSP150375, Polymicro Technologies, AZ, USA)) with an inside diameter of 135 μm and an outside diameter of 363 μm into the chitosan solution to make the thin chitosan film (
Figure 6a). The lower end of the HCF was controlled to just touch the solution. The solution entered the HCF owing to the capillarity effect, and the height of the liquid column increased over dipping time. The HCF was then held vertically and the liquid column shrank to become a chitosan film inside the HCF after air-drying for 24 h, as shown in
Figure 6b. If we set the dipping time within the limit from 0.5 to 3 s, the linear length of the chitosan film would be 1–10 μm. Therefore, the proposed method can effectively guarantee an ideal chitosan film thickness by controlling the dipping time. Two SMF sections could be obtained after cleaving the SMF, as shown in
Figure 6c. Then, we inserted one end of the SMF gradually into the HCF by operating the motorized precision translation stage of the splicer, as shown in
Figure 6d. The length of the air cavity could be controlled by the precision translation stage under a microscope, which is helpful to control the
OPL ratio and investigate experimentally the characteristic of HVE FPI with different
i-orders. Finally, we dropped glue (LOCTITE AA3321, AA3321, Korea Loctite (Shanghai) Co., Ltd, Shanghai, China) on the gap of HCF and SMF to stabilize the structure. This sensor was then placed under a violet light (wavelength: 395 nm).
Theoretically, the higher the value of i, the higher the harmonic orders, causing a higher inner envelope sensitivity. However, the loss of air cavity becomes larger with the increase of OPL1, which could decrease spectral contrast to affect the inner envelope fitting. The thinner the chitosan film is, the higher the basic sensitivity obtained. Meanwhile, the thinner the chitosan film is, the larger the FSR of the chitosan cavity would be. In experiment, the wavelength range is around 400 nm. According to FSR equation , chitosan film of 10 um corresponds to approximately 85 nm, which means that only four more FSRs showed up in the OSA. One FSR corresponds to one inner envelope fitting point, and few fitting points affect the envelope reduction accuracy. Therefore, these two would commonly limit the harmonic orders. In order to ensure high basic sensitivity and a suitable number of envelope fitting points, we chose the thickness of chitosan film as 20 μm and the length of the air cavity as 155 μm for optimization length according to Equation (4).
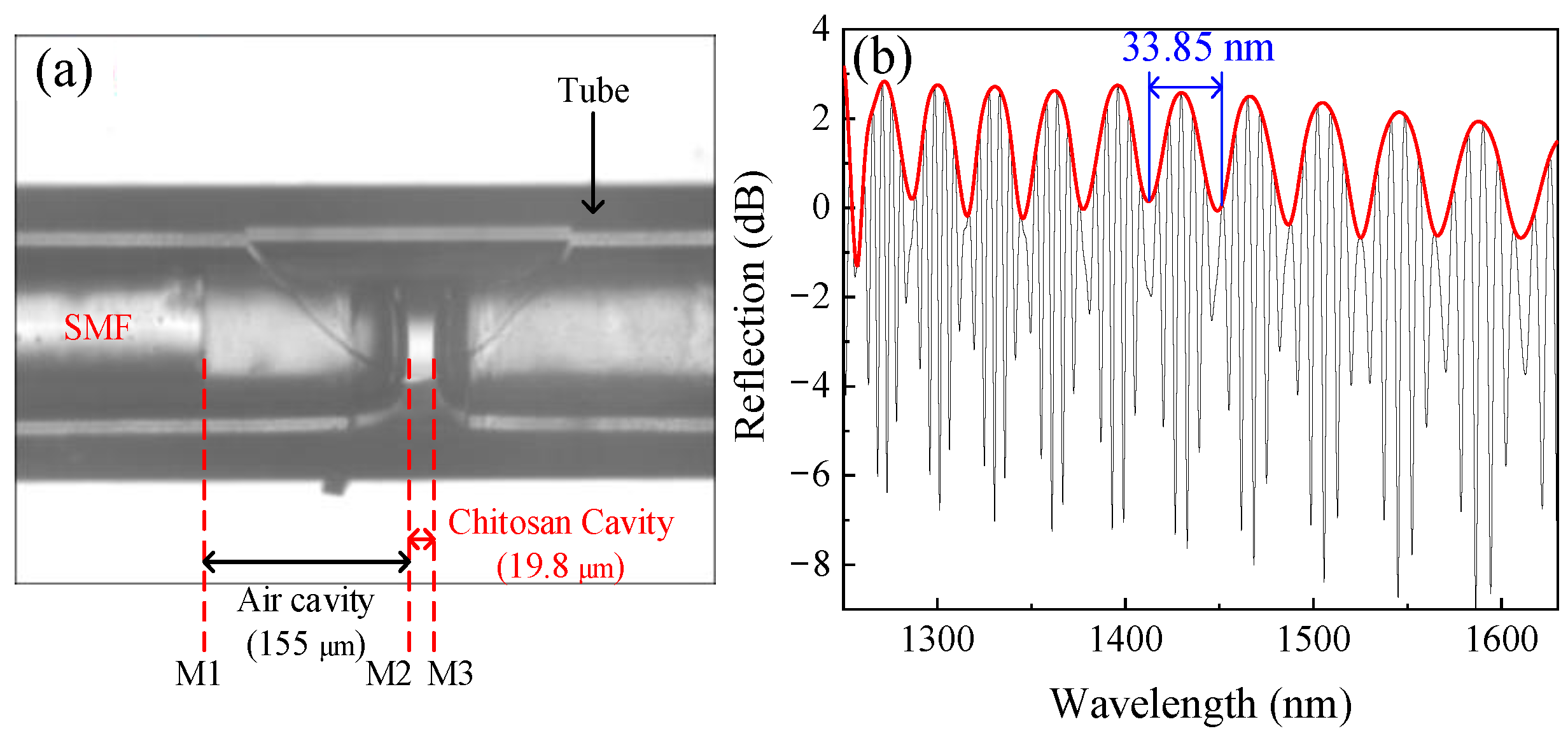
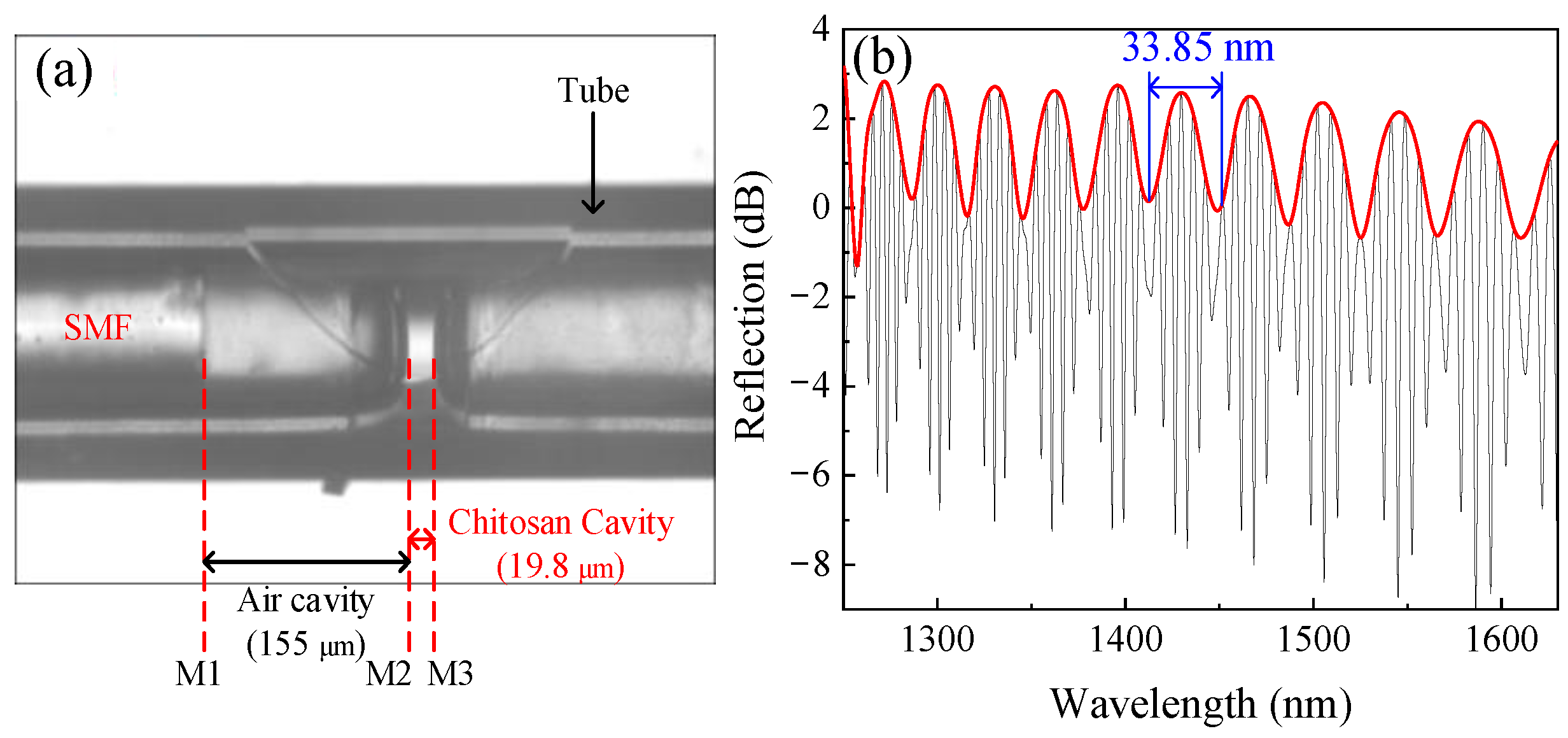
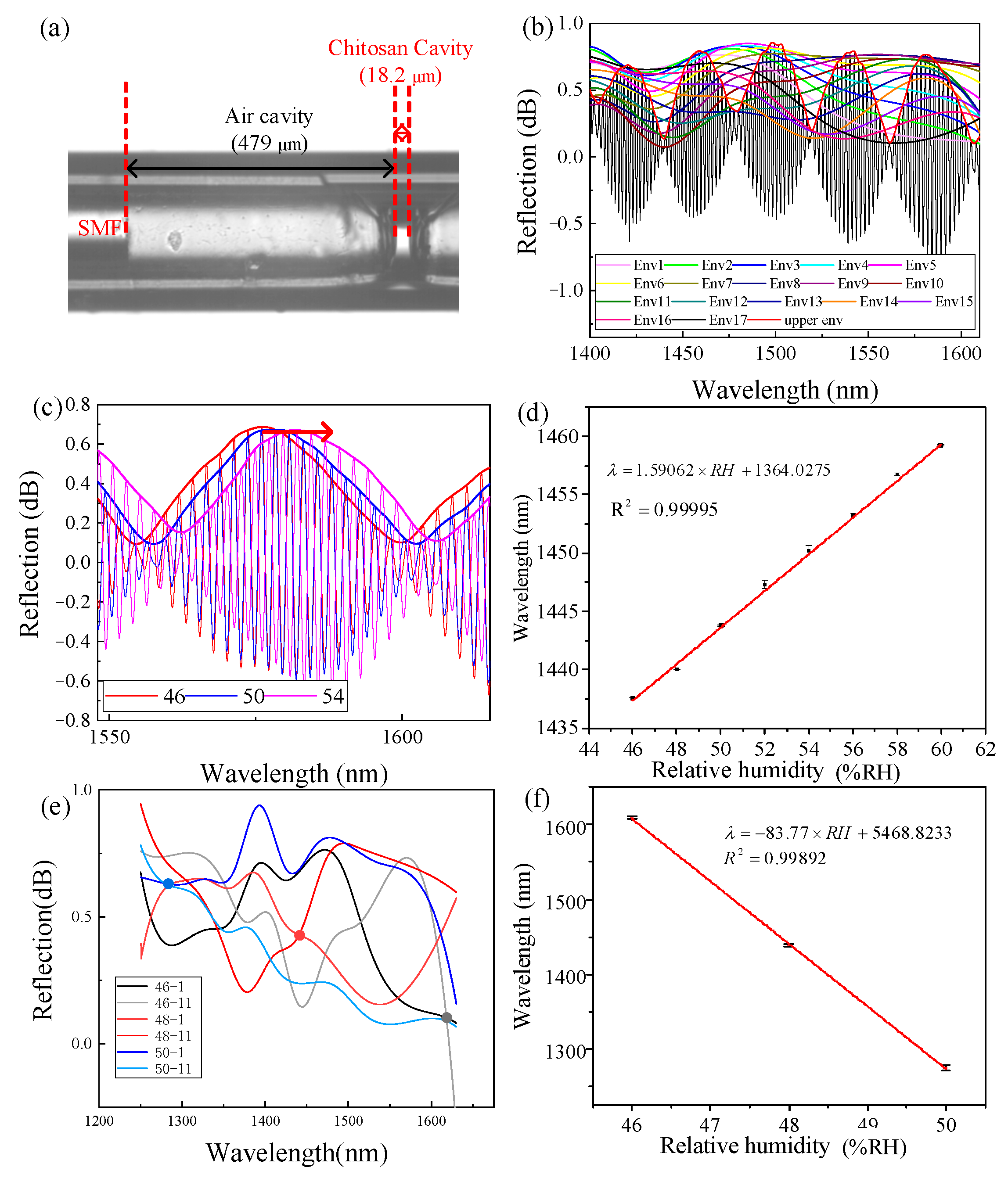
The fabricated sensor and its reflection spectrum are shown in
Figure 7a, b, respectively. The
L1 and
L2 are 155 μm and 19.8 μm, respectively. It can be seen that the experimental spectrum is similar to the results in
Figure 4a.
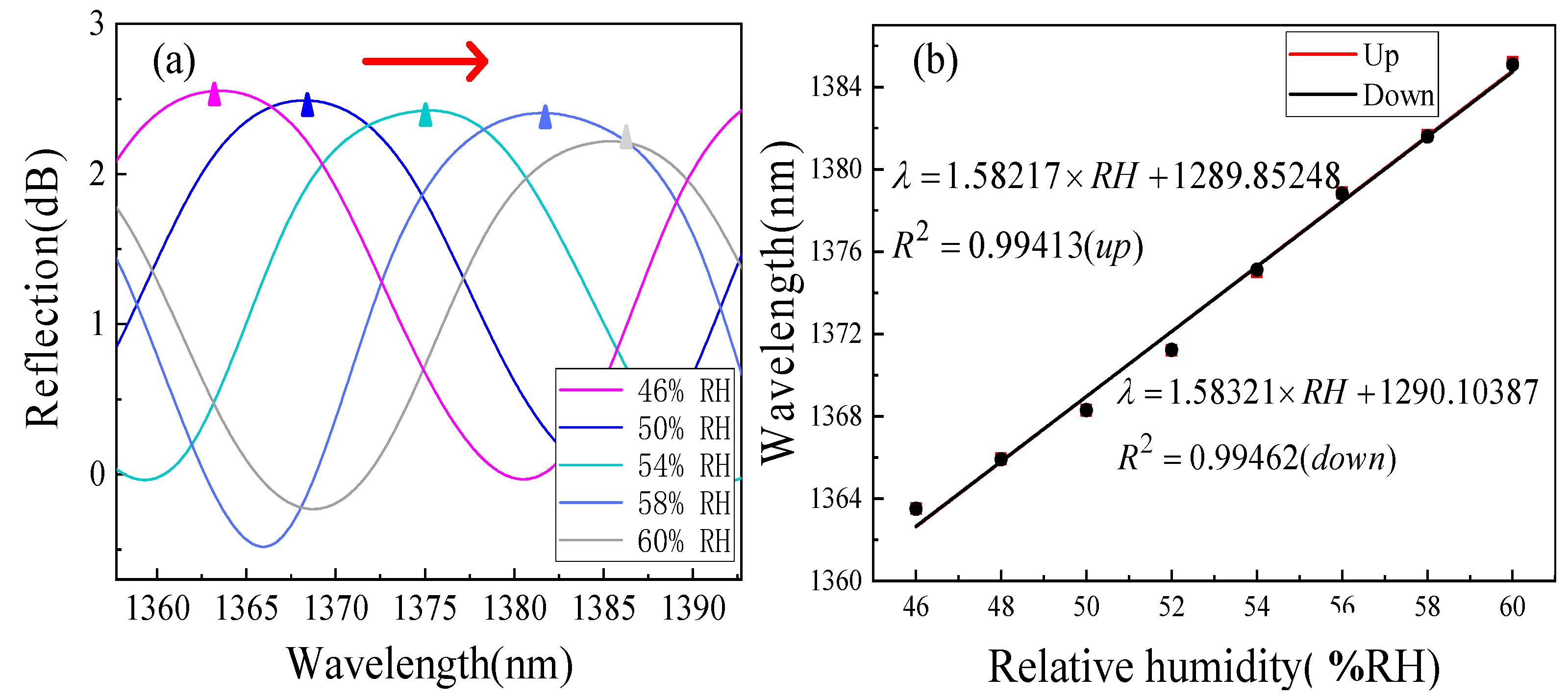
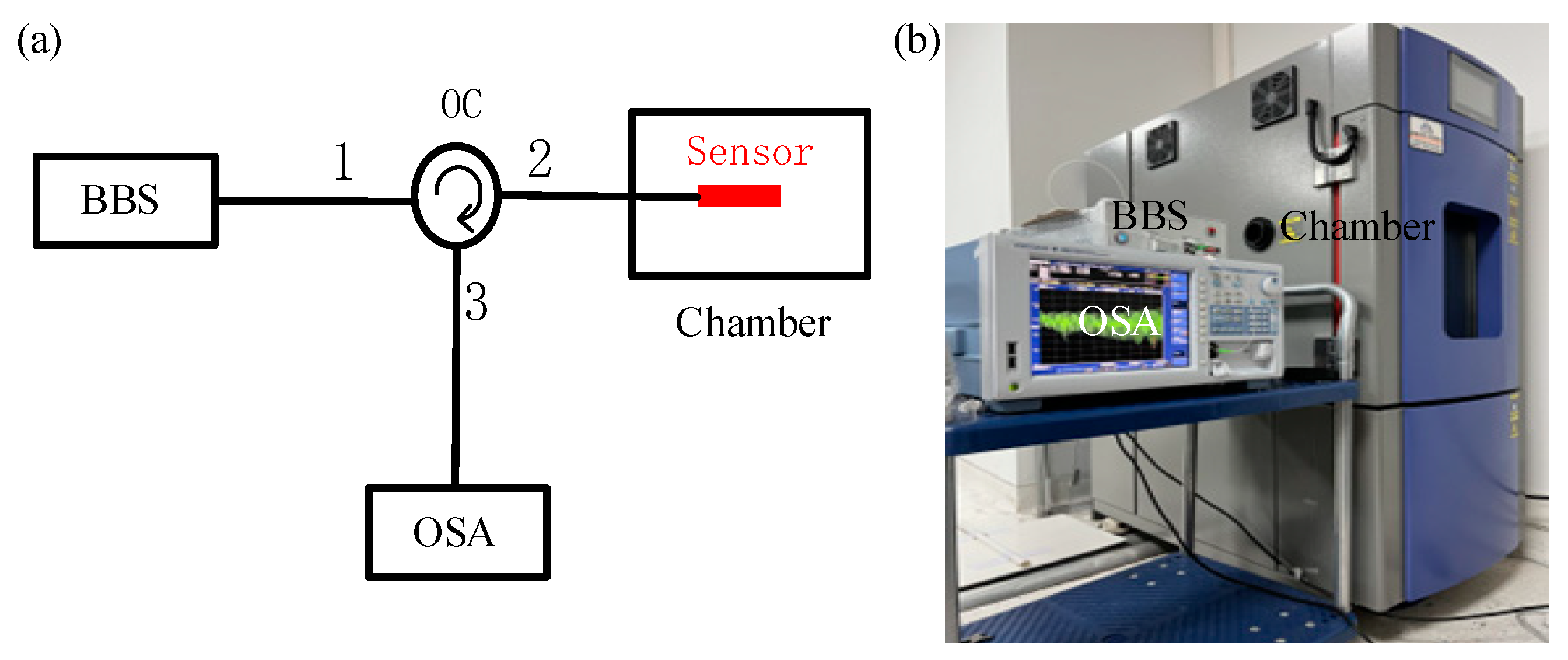
The RH sensing experimental setup is shown in
Figure 8, including a broadband light source (ASE light source, Shenzhen Fiberlake Technology Co., Led, Shenzhen, China, wavelength range: 1200–1700 nm), an optical fiber circulator, an OSA (AQ6370C, Yokogawa, ANDO, USA, wavelength range: 600–1700 nm, highest resolution: 0.02 nm), a sensor probe, and an adjustable temperature and RH test chamber (CK-22G, Dongguan Kingjo Environmental Testing Equipment Co., Ltd, China, RH range: 20–98 %RH, humidity deviation: ±1% RH, Temperature range: −20~150 °C, size of inner box in chamber: 500 × 500 × 600 mm
3). In the experiment, we set the demodulation wavelength range of OSA as 1250–1630 nm.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}