
A Single-Phase High-Impedance Ground Faulty Feeder Detection Method for Small Resistance to Ground Systems Based on Current-Voltage Phase Difference

 ,
,
Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Our Contribution
1.4. Organization of Paper
2. Materials and Methods
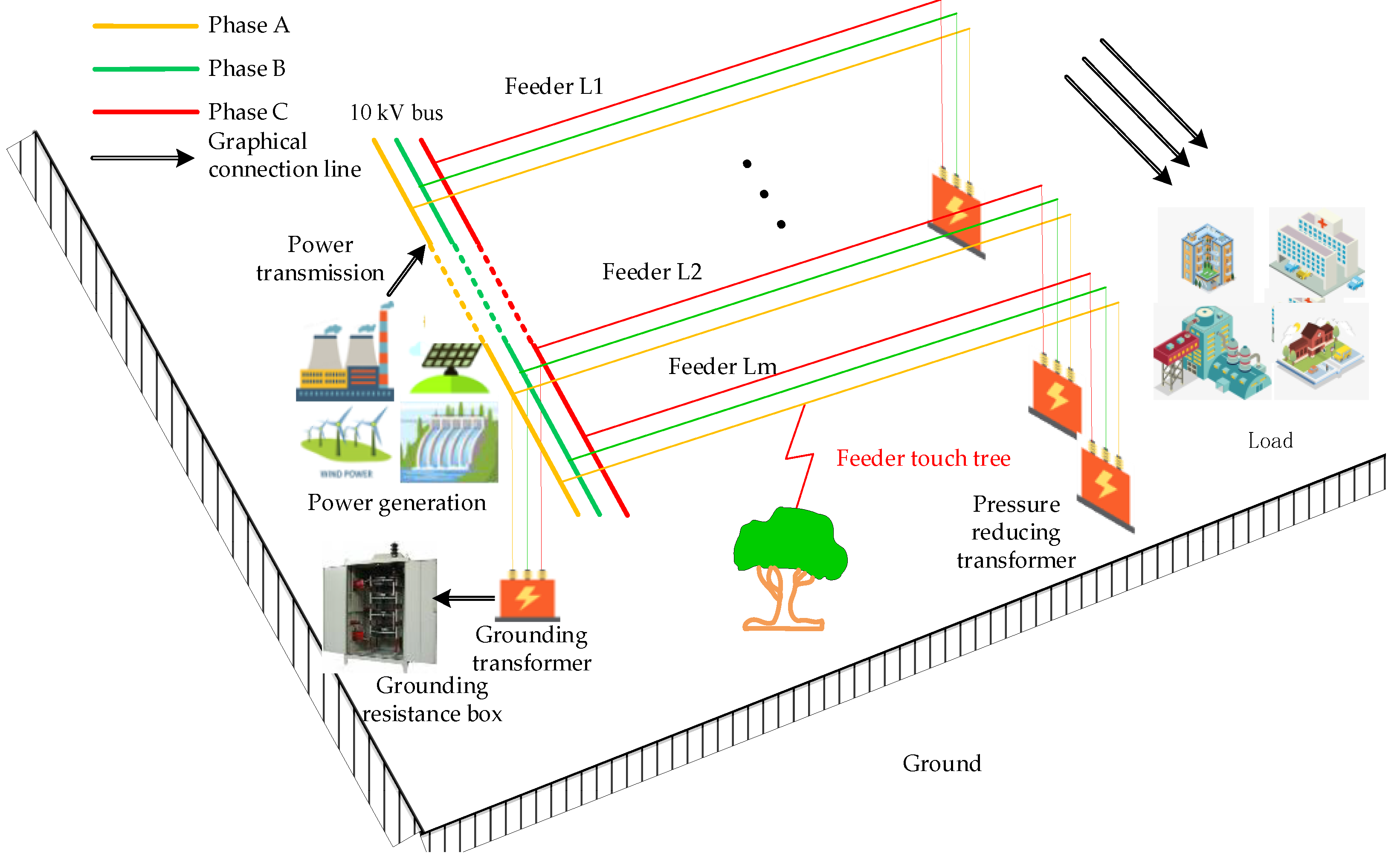
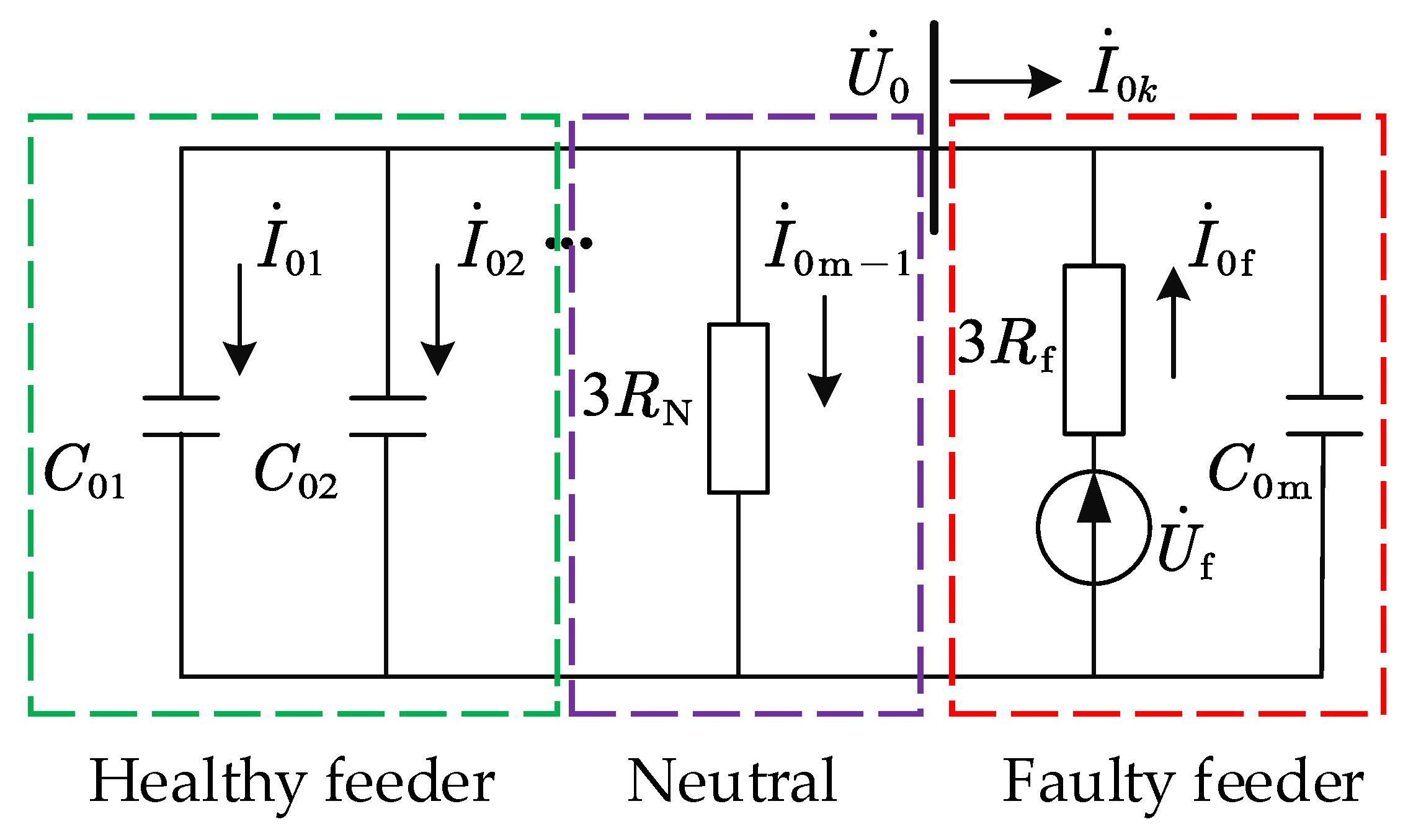
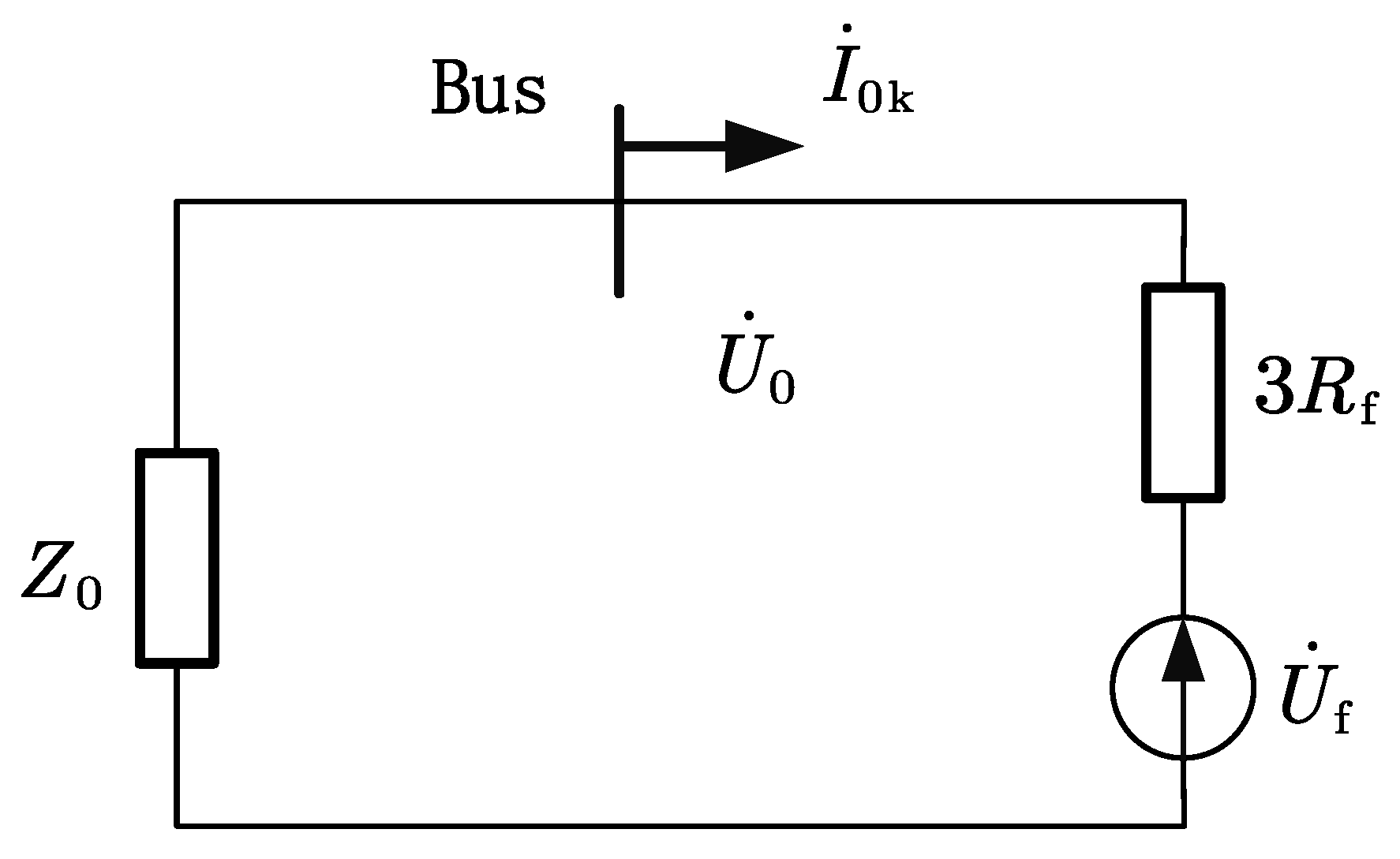
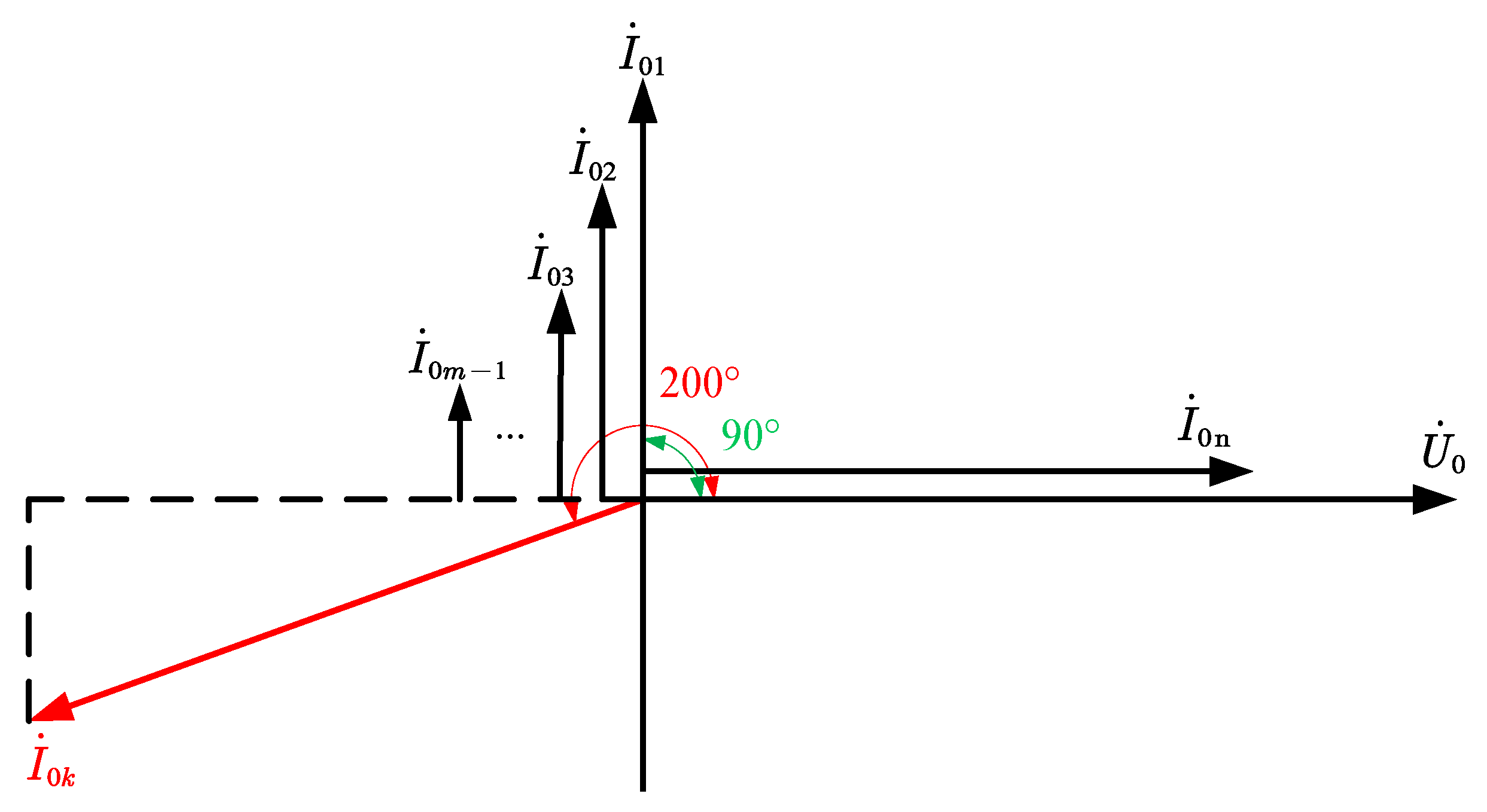
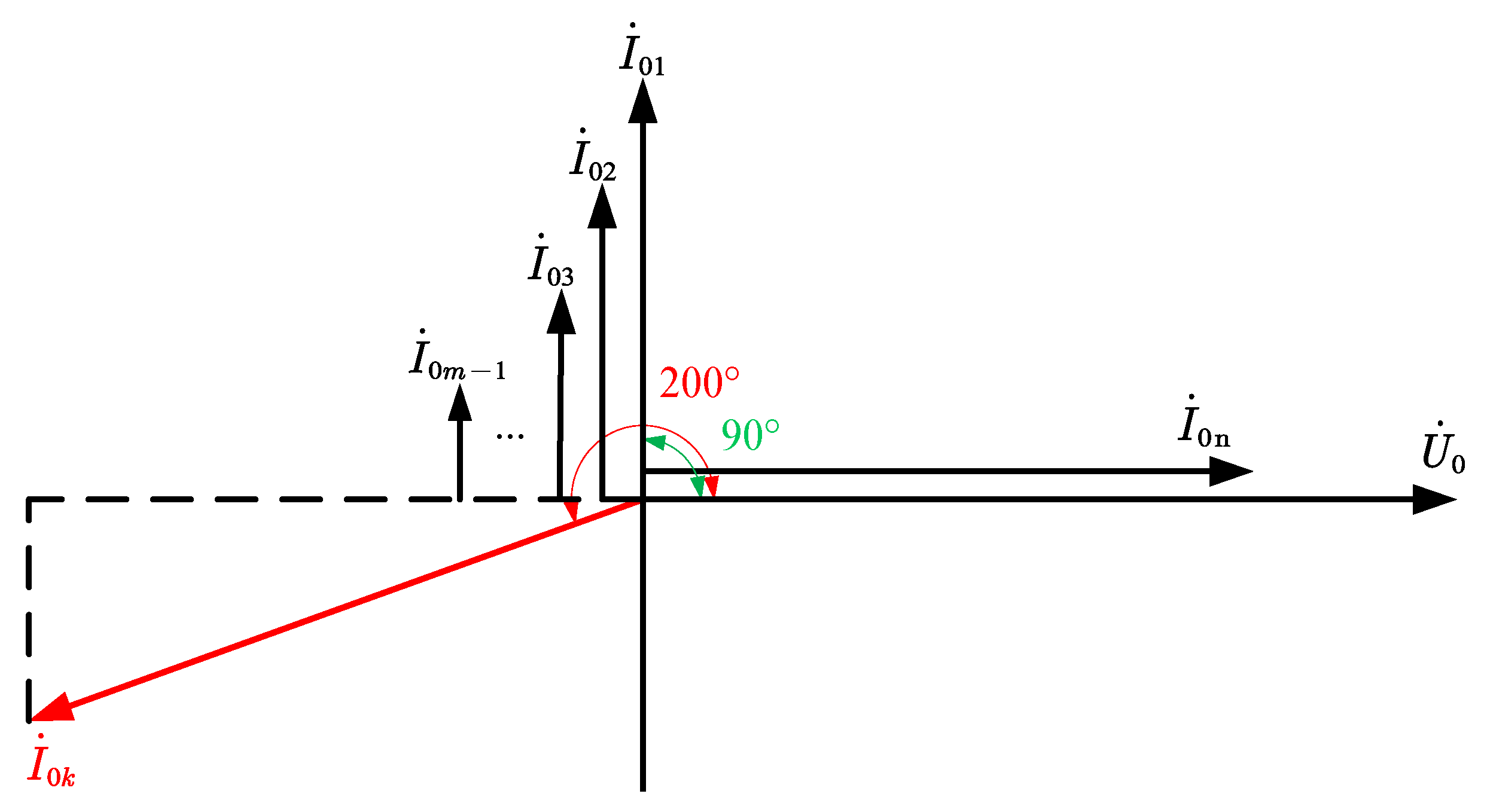
2.1. Single-Phase High-Impedance Ground Fault Zero-Sequence Characteristics Analysis
2.2. Faulty Feeder Detection Method
2.3. Faulty Phase Detection Method
2.4. Specific Parameter Adjustment
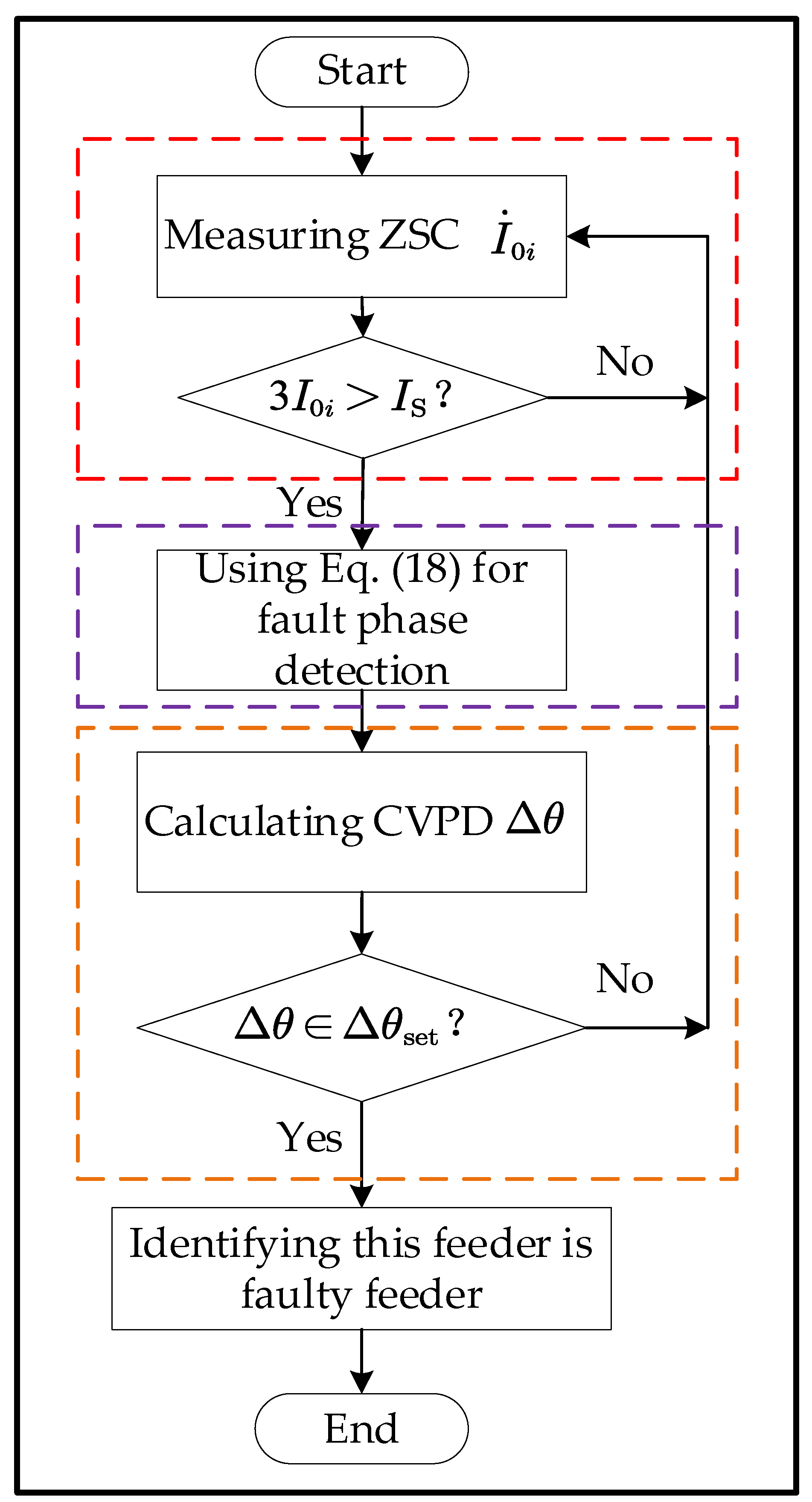
2.5. Detection Process
3. Results
3.1. Simulation Model
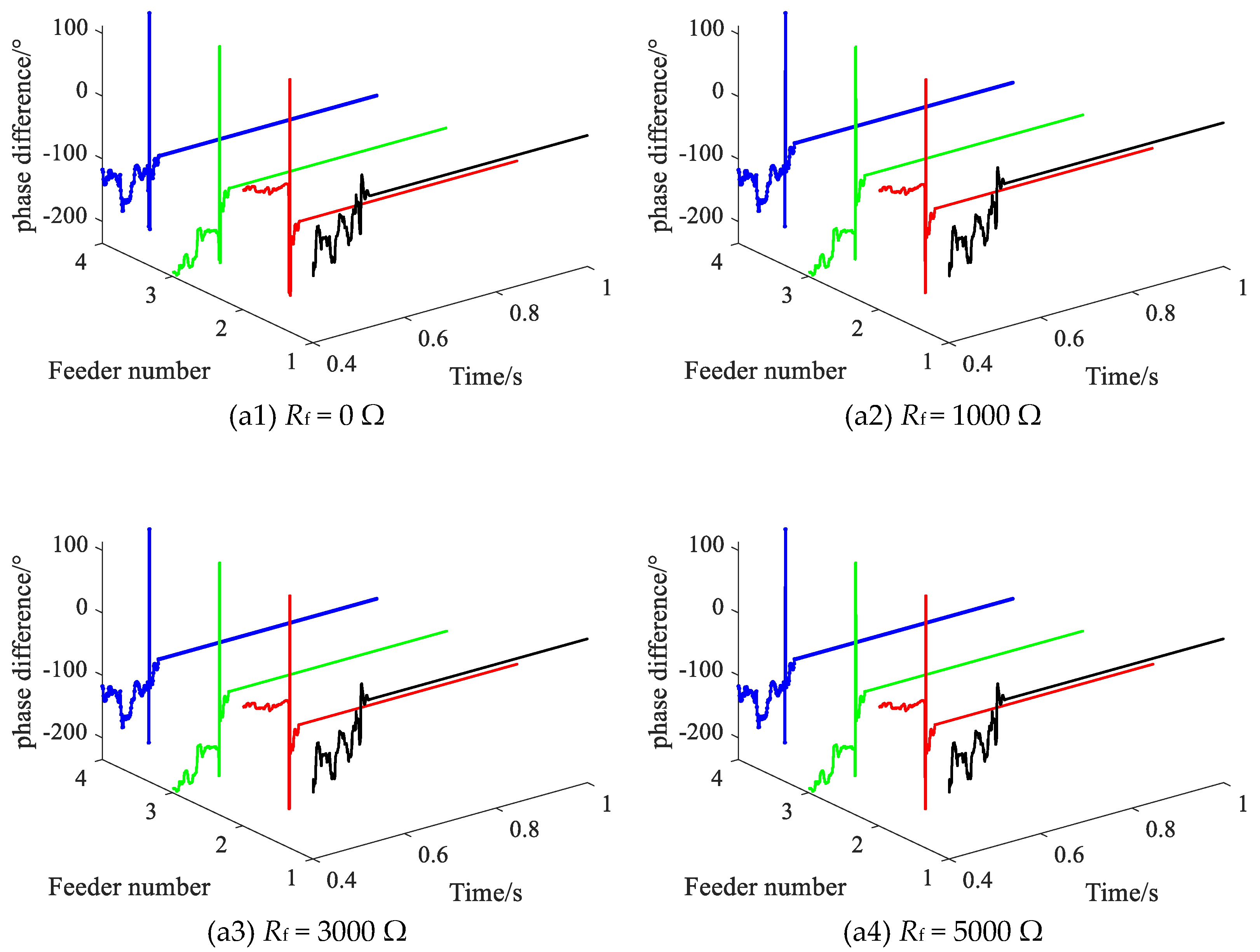
3.2. Different Transition Resistance
3.3. Different Fault Locations
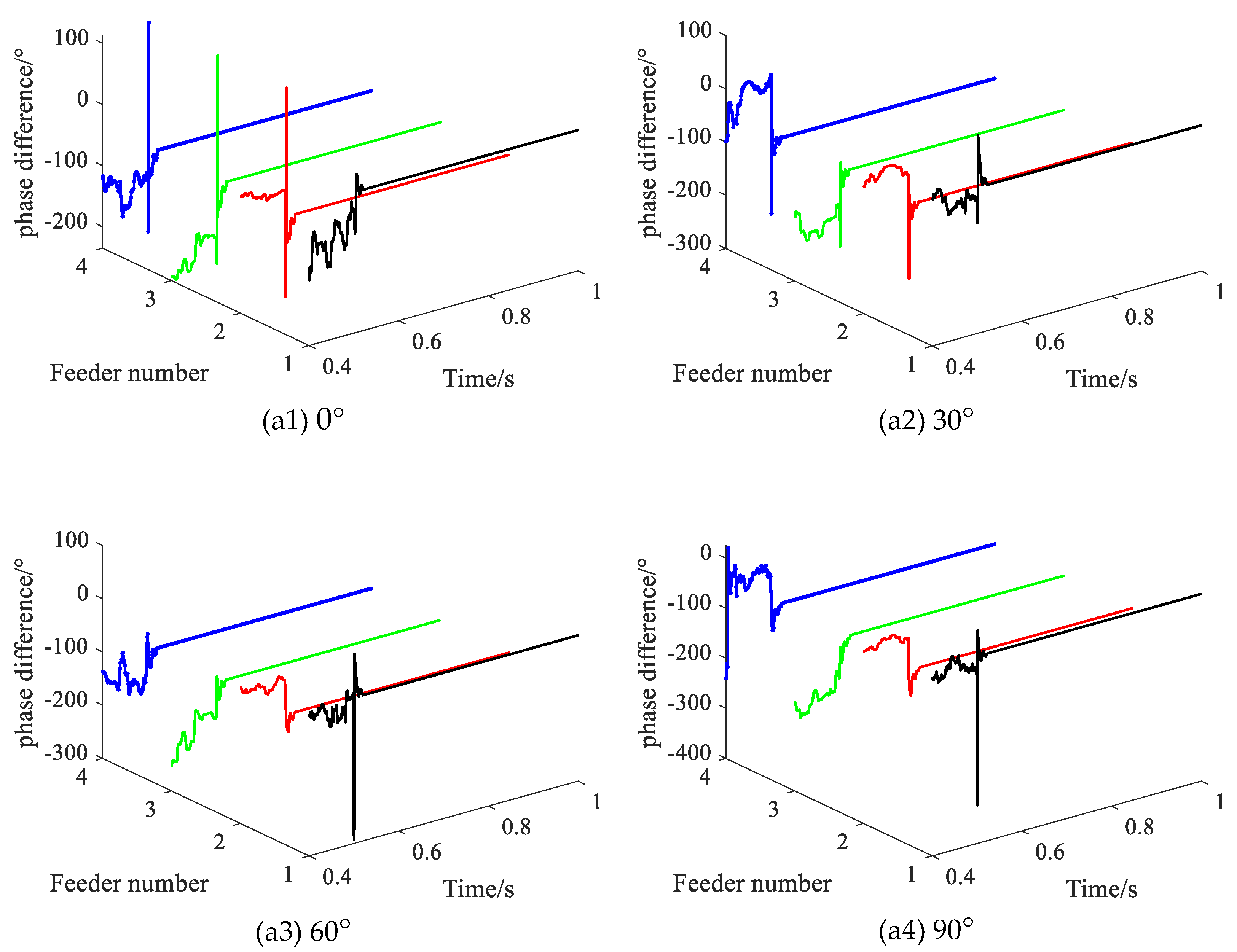
3.4. Different Fault Initial Phase Angles
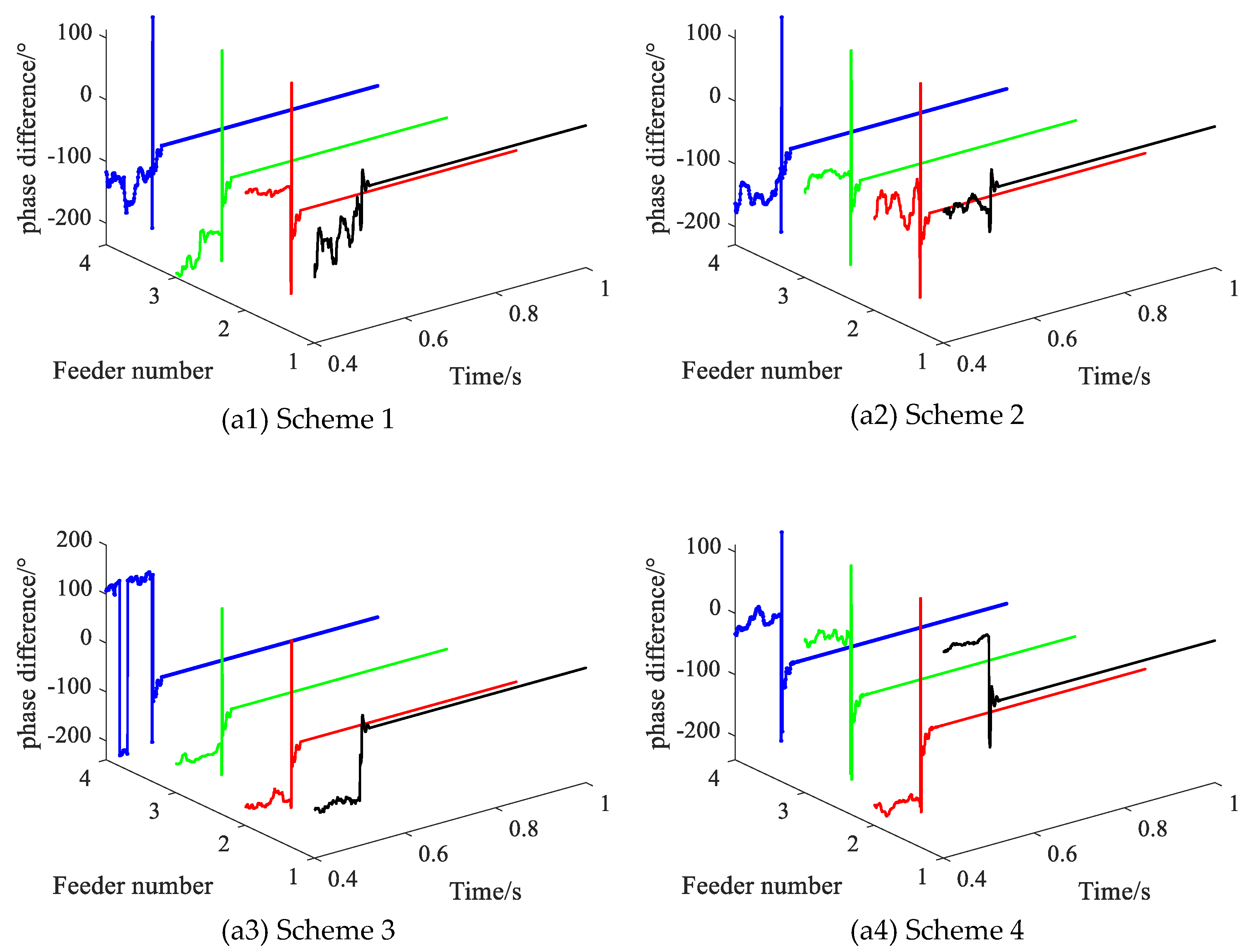
3.5. Different Feeder Lengths
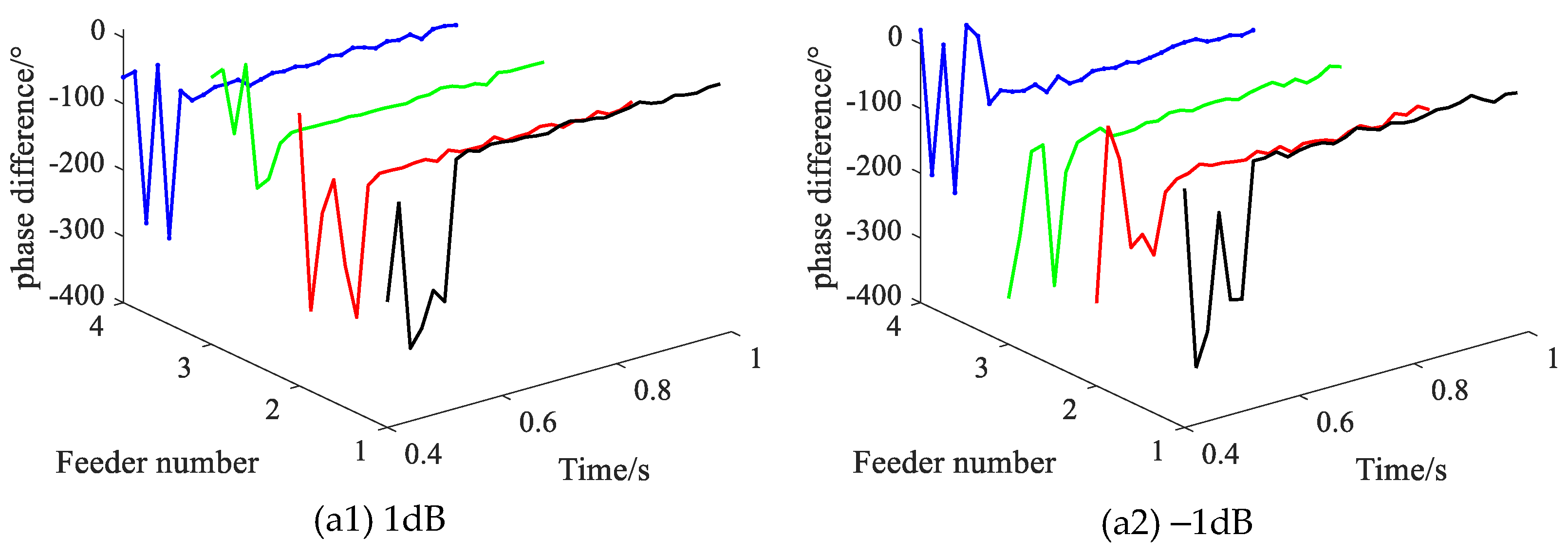
3.6. Different Noise Levels
3.7. Different Data Missing Ratio
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Small resistance to ground system | SRGS |
| Single-phase high resistance grounding fault | SPHIF |
| Zero-sequence current phase | ZSCP (°) |
| Root mean square | RMS |
| Zero-sequence current | ZSC (kA) |
| Current-voltage phase difference | CVPD (°) |
| Zero-sequence voltage | ZSV (kV) |
| Signal-to-noise ratio | SNR (dB) |
| Variational modal decomposition | VMD |
| Teager–Kaiser energy operators | TKEOs |
| Empirical wavelet transform | EWT |
References
- Liao, F.Q.; Li, H.F.; Chen, J.Q.; Liang, Y.S.; Wang, G. High sensitive ground fault location in a low-resistance grounded system. Power Syst. Prot. Control 2021, 49, 150–158. [Google Scholar]
- Ghaderi, A.; Ginn, H.L.; Mohammadpour, H.A. High impedance fault detection: A review. Electr. Power Syst. Res. 2017, 14, 376–388. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, F.; Wang, Y.; Shen, Y.; Yan, F.B.; Yang, Z.C.; Su, L. The Flexible Strategy of Single Phase Grounding Fault in Distribution Network Based on Dual Mode Function. Distrib. Util. 2020, 37, 60–67. [Google Scholar]
- Wang, B.; Cui, X.; Dong, X.Z. Overview of Arc High Impedance Grounding Fault Detection Technologies in Distribution System. Proc. CSEE 2020, 40, 96–107. [Google Scholar]
- Xue, Y.D.; Wang, Y.; Xu, B.Y. High Sensitive Zero-sequence Stage Current Protection for Low-resistance Grounding System. Proc. CSEE 2020, 40, 6217–6226. [Google Scholar]
- Wang, Y.; Xue, Y.D.; Xu, B.Y.; Li, T.Y. Zero-sequence inverse-time overcurrent protection in low resistance grounding system with grounding fault. Autom. Electr. Power Syst. 2018, 42, 150–157. [Google Scholar]
- Lin, Z.C.; Wang, Y.; Luo, B.S.; Xue, Y.D.; Wang, Y.M.; Wang, J.H. Configuration and Tuning of High-sensitivity Grounding Fault Protection for Low-resistance Grounding System. Proc. CSU-EPSA 2020, 32, 25–32. [Google Scholar]
- Ren, W.; Xue, Y.D.; Xu, B.Y.; Li, Y.Q. Longitudinal Differential Protection of High Resistance Grounding Faults in Low-resistance Grounding System. Power Technol. 2021, 45, 3276–3282. [Google Scholar]
- Gao, W.L.; Gao, H.L.; Xu, B.; Li, L. Feasibility analysis of adopting 5G in differential protection of distribution networks. Power Syst. Prot. Control 2021, 49, 1–7. [Google Scholar]
- Wu, H.J.; Chen, J.R.; Liao, F.; Li, Y.H. Centralized protection for a grounding fault in a low-resistance grounding distribution system. Power Syst. Prot. Control 2021, 49, 141–149. [Google Scholar]
- Lin, Z.C.; Liu, X.M.; Wang, Y.M. Grounding fault protection based on zero sequence current comparison in low resistance grounding system. Power Syst. Prot. Control 2018, 46, 15–21. [Google Scholar]
- Sheng, Y.R.; Cong, W.; Pu, H.Y.; Li, X.M. Detection method of high impedance grounding fault based on differential current of zero-sequence current projection and neutral point current in low-resistance grounding system. Electr Power Autom Equip. 2019, 39, 17–22. [Google Scholar]
- Yang, F.; Liu, X.X.; Shen, Y.; Xue, Y.D.; Zhou, Z.Q.; Xu, B.Y. High Resistance Ground Fault Protection of Low Resistance Grounding System Based on Zero Sequence Current Projection Coefficient. Power Syst. Technol. 2020, 44, 1128–1133. [Google Scholar]
- Wang, X.W.; Liu, W.B.; Liang, Z.F.; Guo, L.; Du, H.; Gao, J.; Li, C.J. Faulty feeder detection based on the integrated inner product under high impedance fault for small resistance to ground systems. Int. J. Electr. Power Energy Syst. 2022, 140, 108078. [Google Scholar] [CrossRef]
- Li, H.F.; Chen, J.Q.; Zeng, D.H.; Liang, Y.S.; Wang, G. High-sensitive zero-sequence current protection for low-resistance grounding system. Electr. Power Autom. Equip. 2018, 38, 198–204. [Google Scholar]
- Xue, Y.D.; Liu, S.; Wang, Y.S.; Xu, B.Y. Grounding Fault Protection in Low Resistance Grounding System Based on Zero-sequence Voltage Ratio Restraint. Autom. Electr. Power Syst. 2016, 40, 112–117. [Google Scholar]
- Long, Y.; Ouyang, J.X.; Xiong, X.F.; Ma, G.S.; Yang, M.B. Protection principle of single-phase high resistance fault for distribution network based on zero-sequence power variation. Trans. China Electrotech. Soc. 2019, 34, 3687–3695. [Google Scholar]
- Li, Z.Y.; Li, J.L.; Su, S.; Zhang, C.H.; Liu, Y.; Yi, Z.N. Intelligent resistance grounding method of neutral point based on single-phase grounding fault zone of distribution network. Autom. Electr. Power Syst. 2019, 43, 145–150. [Google Scholar]
- Yu, K.; Xu, P.B.; Zeng, X.J.; Li, L.; Yang, L.B. Grounding Fault Line Selection of Distribution Networks Based on Fuzzy Measures Integrated Diagnosis. Trans. China Electrotech. Soc. 2022, 37, 623–633. [Google Scholar]
- Sapountzoglou, N.; Lago, J.; Schutter, B.D.; Raison, B. A generalizable and sensor-independent deep learning method for fault detection and location in low-voltage distribution grids. Appl Energ. 2020, 276, 115299. [Google Scholar] [CrossRef]
- Cui, Q.; El-Arroudi, K.; Weng, Y. A feature selection method for high impedance fault detection. IEEE Trans. Power Deliv. 2019, 34, 1203–1215. [Google Scholar] [CrossRef] [Green Version]
- Wei, M.J.; Liu, W.S.; Zhang, H.X.; Shi, F.; Chen, W.J. Distortion-based detection of high impedance fault in distribution systems. IEEE Trans. Power Deliv. 2020, 36, 1603–1618. [Google Scholar] [CrossRef]
- Geng, J.Z.; Wang, B.; Dong, X.Z.; Dominik, B. Analysis and detection of high impedance grounding fault in neutral point effectively grounding distribution network. Autom. Electr. Power Syst. 2013, 37, 85–91. [Google Scholar]
- Wang, B.; Geng, J.Z.; Dong, X.Z. High-impedance fault detection based on nonlinear voltage–current characteristic profile identification. IEEE T Smart Grid. 2016, 9, 3783–3791. [Google Scholar] [CrossRef]
- Chen, J.Q.; Li, H.F.; Deng, C.J.; Wang, G. Detection of Single-Phase to Ground Faults in Low-Resistance Grounded MV Systems. IEEE Trans. Power Deliv. 2020, 36, 1499–1508. [Google Scholar] [CrossRef]
- Wang, X.W.; Gao, J.; Wei, X.X.; Song, G.B.; Wu, L.; Liu, J.W.; Zeng, Z.H.; Kheshti, M. High impedance fault detection method based on variational mode decomposition and Teager–Kaiser energy operators for distribution network. IEEE T Smart Grid. 2019, 10, 6041–6054. [Google Scholar] [CrossRef]
- Gao, J.; Wang, X.H.; Wang, X.W.; Yang, A.J.; Yuan, H.; Wei, X.X. A High-Impedance Fault Detection Method for Distribution Systems Based on Empirical Wavelet Transform and Differential Faulty Energy. IEEE T Smart Grid. 2021, 13, 900–912. [Google Scholar] [CrossRef]
- Santos, W.C.; Lopes, F.V.; Brito, N.S.D.; Souza, B.A. High-impedance fault identification on distribution networks. IEEE Trans. Power Deliv. 2016, 32, 23–32. [Google Scholar] [CrossRef]
- Li, J.R.; Li, Y.L.; Wang, W.K.; Song, J.Z.; Zhang, Y.K. Fault Line Detection Method for Flexible Grounding System Based on Changes of Phase Difference Between Zero Sequence Current and Voltage. Power Syst. Technol. 2021, 45, 4847–4855. [Google Scholar]
- Yang, F.; Jin, X.; Shen, Y.; Lei, Y.; Xue, Y.D.; Xu, B.Y. Dicrimination Algorithm of Grounding Fault Direction Based on Variation of Zero-sequence Admittance in Flexible Grounding System. Autom. Electr. Power Syst. 2020, 44, 88–94. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feeder Type | Phase Sequence | Resistance | Inductance | Capacitance |
|---|---|---|---|---|
| Cable | positive order | 0.27 Ω/km | 0.225 mH/km | 0.339 μF/km |
| zero-sequence | 2.7 Ω/km | 1.019 mH/km | 0.280 μF/km | |
| Overhead | positive order | 0.125 Ω/km | 1.3 mH/km | 0.0096 μF/km |
| zero-sequence | 0.275 Ω/km | 4.6 mH/km | 0.0054 μF/km |
| Feeder Number | Feeder Type |
|---|---|
| L1 | overhead + cable |
| L2 | cable |
| L3 | cable + overhead |
| L4 | overhead |
| Rf/Ω | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| 0 | 238.9 | −19.3 | −123.8 | −123.5 | −125 | L1√ |
| 1000 | 238.9 | 0.3 | −102.8 | −102.6 | −104.2 | L1√ |
| 3000 | 238.9 | 0.5 | −102.7 | −102.4 | −104.1 | L1√ |
| 5000 | 238.9 | 0.5 | −102.6 | −102.4 | −104.0 | L1√ |
| – | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| f1 | 238.9 | 0.5 | −102.6 | −102.4 | −104.0 | L1√ |
| f2 | 238.9 | −98.4 | 2.2 | −98.9 | −100.6 | L2√ |
| f3 | 238.9 | −98.8 | −99.6 | 1.7 | −101.0 | L3√ |
| f4 | 238.9 | −100.7 | −101.4 | −101.1 | 1.4 | L4√ |
| Fault Initial Phase Angle/° | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| 0 | 238.9 | 0.5 | −102.6 | −102.4 | −104.0 | L1√ |
| 30 | 268.9 | −2.3 | −101.4 | −101.2 | −102.8 | L1√ |
| 60 | 299.0 | −2.9 | −88.5 | −88.7 | −89.9 | L1√ |
| 90 | 329.0 | −4.4 | −96.4 | −96.3 | −97.9 | L1√ |
| Feeder Number | Scheme 1 /km | Scheme 2 /km | Scheme 3 /km | Scheme 4 /km |
|---|---|---|---|---|
| L1 | 7 + 7 + 8 | 5 + 10 + 10 | 5 + 10 + 10 | 10 + 15 + 15 |
| L2 | 5 + 5 | 10 + 5 | 5 + 10 | 15 + 15 |
| L3 | 8 + 5 + 7 | 5 + 10 + 10 | 10 + 10 + 10 | 15 + 15 + 15 |
| L4 | 10 + 10 | 10 + 5 | 5 + 10 | 15 + 15 |
| Scheme | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| 1 | 238.9 | 0.5 | −102.6 | −102.4 | −104.0 | L1√ |
| 2 | 238.9 | −0.3 | −102.8 | −102.9 | −104.8 | L1√ |
| 3 | 238.9 | 1.4 | −103.7 | −103.8 | −105.7 | L1√ |
| 4 | 238.9 | −3.4 | −111.6 | −111.6 | −111.9 | L1√ |
| Noise/dB | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| 1 | 238.9 | 10.4 | −151.9 | −143.8 | −135.1 | L1√ |
| −1 | 238.9 | 13.8 | −139.6 | −128.3 | −92.5 | L1√ |
| Data Missing Ratio | /° | CVPD/° | Result | |||
|---|---|---|---|---|---|---|
| L1 | L2 | L3 | L4 | |||
| 20 | 232.0 | −119.4 | −96.6 | 9.9 | −107.8 | L3√ |
| 30 | 232.0 | −103.7 | −97.9 | 10.4 | −107.5 | L3√ |
| 40 | 232.0 | −123.9 | −95.9 | 24.6 | −107.5 | L3√ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, Z.; Zhang, Z.; Wang, Y.; Duan, J.; Yan, W.; Lu, W. A Single-Phase High-Impedance Ground Faulty Feeder Detection Method for Small Resistance to Ground Systems Based on Current-Voltage Phase Difference. Sensors 2022, 22, 4646. https://doi.org/10.3390/s22124646
Hou Z, Zhang Z, Wang Y, Duan J, Yan W, Lu W. A Single-Phase High-Impedance Ground Faulty Feeder Detection Method for Small Resistance to Ground Systems Based on Current-Voltage Phase Difference. Sensors. 2022; 22(12):4646. https://doi.org/10.3390/s22124646
Chicago/Turabian StyleHou, Zequan, Zhihua Zhang, Yizhao Wang, Jiandong Duan, Wanying Yan, and Wenchao Lu. 2022. "A Single-Phase High-Impedance Ground Faulty Feeder Detection Method for Small Resistance to Ground Systems Based on Current-Voltage Phase Difference" Sensors 22, no. 12: 4646. https://doi.org/10.3390/s22124646
APA StyleHou, Z., Zhang, Z., Wang, Y., Duan, J., Yan, W., & Lu, W. (2022). A Single-Phase High-Impedance Ground Faulty Feeder Detection Method for Small Resistance to Ground Systems Based on Current-Voltage Phase Difference. Sensors, 22(12), 4646. https://doi.org/10.3390/s22124646