
Kinematic Analysis of Exoskeleton-Assisted Community Ambulation: An Observational Study in Outdoor Real-Life Scenarios

 ,
,  ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Design
2.2. Participants
- Inclusion criteria:
- ○
- age between 18–80 years;
- ○
- ability to fit into the WPE (height between 155–195 cm; weight ≤ 113 kg; hip width ≤ 46 cm).
- Exclusion criteria:
- ○
- persistent contractures of the joints;
- ○
- orthopedic injuries;
- ○
- pain;
- ○
- severe osteoporosis;
- ○
- skin breakdown;
- ○
- pregnancy.
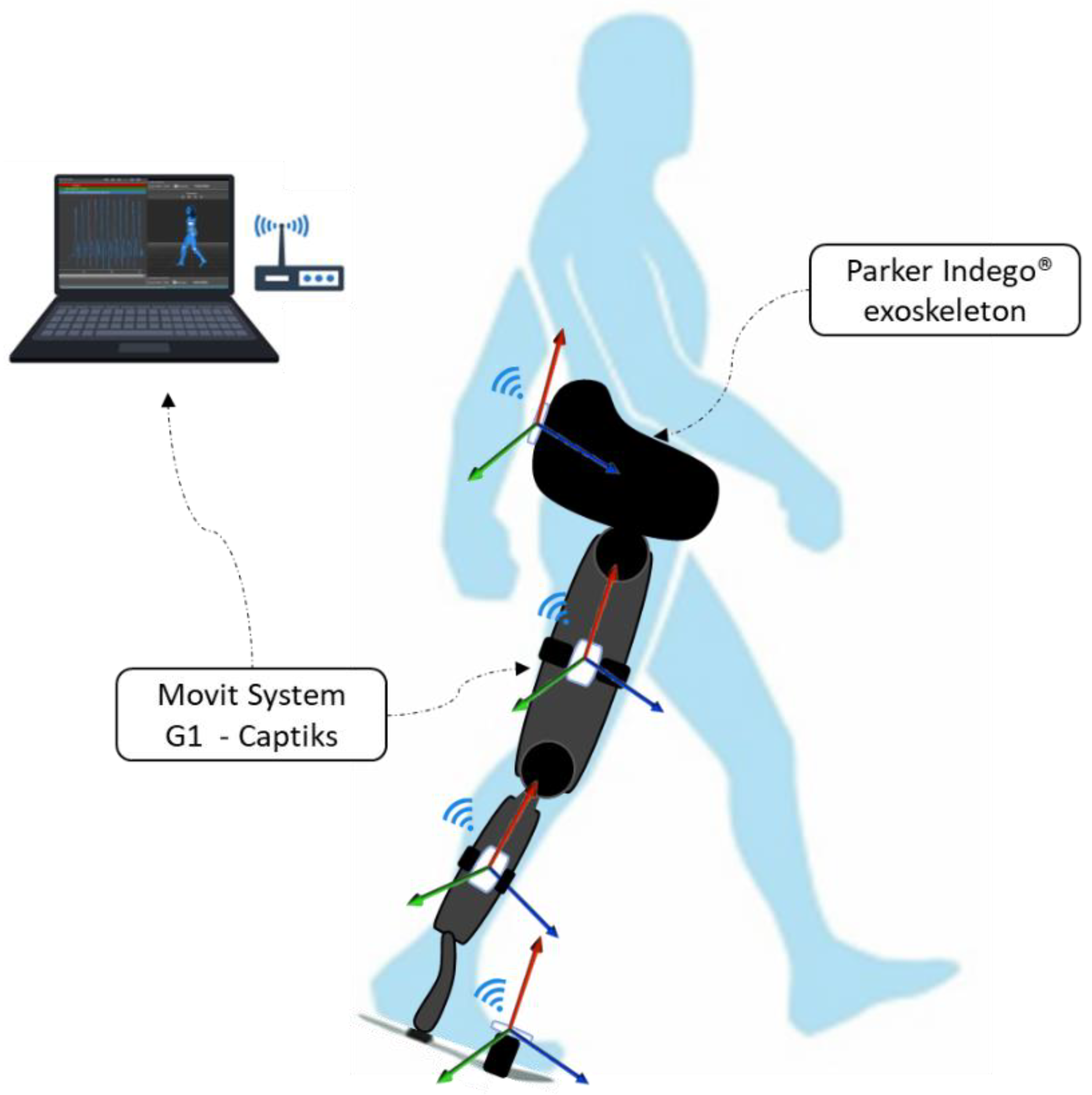
2.3. Experimental Setup
2.4. Scenarios
- Walking over regular terrain: walking through an indoor regular 10 m terrain (marble) at a self-selected normal pace.
- Walking over irregular terrain: walking through an irregular 10 m outdoor terrain (cobblestones) at self-selected normal speed, self-selected high speed, and self-selected low speed.
- Ascending slopes: walking on an 8 m outdoor ascending ramp (standard inclined wheelchair ramp; slope 8%) at self-selected normal speed.
- Descending slopes: walking on an 8 m outdoor descending ramp (standard inclined wheelchair ramp; slope 8%) at a self-selected normal speed.
2.5. Data Processing
- Cadence (step/min)—number of steps taken in one-minute time;
- Gait cycle (s)—the mean duration of the gait cycle starting with the first heel contact and ending with the next heel contact of the same limb;
- Double support (s)—time during which the feet are on the ground;
- Stance (s)—time starting with the first contact and ending at the toe-off of the same limb;
- Swing (s)—time beginning with toe-off and ending with the first contact of the same limb.
2.6. Ethical Aspects
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miller, E.L.; Murray, L.; Richards, L.; Zorowitz, R.D.; Bakas, T.; Clark, P.; Billinger, S.A.; American Heart Association Council on Cardiovascular Nursing and the Stroke Council. Comprehensive overview of nursing and interdisciplinary rehabilitation care of the stroke patient: A scientific statement from the American Heart Association. Stroke 2010, 41, 2402–2448. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Balasubramanian, C.K.; Clark, D.J.; Fox, E.J. Walking adaptability after a stroke and its assessment in clinical settings. Stroke Res. Treat. 2014, 2014, 591013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pellicciari, L.; Agosti, M.; Goffredo, M.; Pournajaf, S.; Le Pera, D.; De Pisi, F.; Franceschini, M.; Damiani, C. Factors Influencing Functional Outcome at Discharge: A Retrospective Study on a Large Sample of Patients Admitted to an Intensive Rehabilitation Unit. Am. J. Phys. Med. Rehabil. 2021, 100, 483–491. [Google Scholar] [CrossRef] [PubMed]
- Perry, J.; Garrett, M.; Gronley, J.K.; Mulroy, S.J. Classification of walking handicap in the stroke population. Stroke 1995, 26, 982–989. [Google Scholar] [CrossRef]
- Barbeau, H. Locomotor training in neurorehabilitation: Emerging rehabilitation concepts. Neurorehabilit. Neural Repair 2003, 17, 3–11. [Google Scholar] [CrossRef] [PubMed]
- Seccia, R.; Boresta, M.; Fusco, F.; Tronci, E.; Di Gemma, E.; Palagi, L.; Mangone, M.; Agostini, F.; Bernetti, A.; Santilli, V.; et al. Data of patients undergoing rehabilitation programs. Data Brief 2020, 30, 105419. [Google Scholar] [CrossRef]
- Pournajaf, S.; Goffredo, M.; Agosti, M.; Massucci, M.; Ferro, S.; Franceschini, M.; Italian Study Group on Implementation of Stroke Care (ISC Study). Community ambulation of stroke survivors at 6 months follow-up: An observational study on sociodemographic and sub-acute clinical indicators. Eur. J. Phys. Rehabil. Med. 2019, 55, 433–441. [Google Scholar] [CrossRef]
- Selves, C.; Stoquart, G.; Lejeune, T. Gait rehabilitation after stroke: Review of the evidence of predictors, clinical outcomes and timing for interventions. Acta Neurol. Belg. 2020, 120, 783–790. [Google Scholar] [CrossRef]
- Vale, N.; Gandolfi, M.; Vignoli, L.; Botticelli, A.; Posteraro, F.; Morone, G.; Dell’Orco, A.; Dimitrova, E.; Gervasoni, E.; Goffredo, M.; et al. Electromechanical and Robotic Devices for Gait and Balance Rehabilitation of Children with Neurological Disability: A Systematic Review. Appl. Sci. 2021, 11, 2061. [Google Scholar] [CrossRef]
- Gandolfi, M.; Vale, N.; Posteraro, F.; Morone, G.; Dell’orco, A.; Botticelli, A.; Dimitrova, E.; Gervasoni, E.; Goffredo, M.; Zenzeri, J.; et al. State of the art and challenges for the classification of studies on electromechanical and robotic devices in neurorehabilitation: A scoping review. Eur. J. Phys. Rehabil. Med. 2021, 57, 831–840. [Google Scholar] [CrossRef]
- Molteni, F.; Guanziroli, E.; Goffredo, M.; Calabro, R.S.; Pournajaf, S.; Gaffuri, M.; Gasperini, G.; Filoni, S.; Baratta, S.; Galafate, D.; et al. Gait Recovery with an Overground Powered Exoskeleton: A Randomized Controlled Trial on Subacute Stroke Subjects. Brain Sci. 2021, 11, 104. [Google Scholar] [CrossRef] [PubMed]
- Pinto-Fernandez, D.; Torricelli, D.; Sanchez-Villamanan, M.D.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance Evaluation of Lower Limb Exoskeletons: A Systematic Review. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef] [PubMed]
- Goffredo, M.; Guanziroli, E.; Pournajaf, S.; Gaffuri, M.; Gasperini, G.; Filoni, S.; Baratta, S.; Damiani, C.; Franceschini, M.; Molteni, F.; et al. Overground wearable powered exoskeleton for gait training in subacute stroke subjects: Clinical and gait assessments. Eur. J. Phys. Rehab. Med. 2019, 55, 710–721. [Google Scholar] [CrossRef]
- Goffredo, M.; Iacovelli, C.; Russo, E.; Pournajaf, S.; Di Blasi, C.; Galafate, D.; Pellicciari, L.; Agosti, M.; Filoni, S.; Aprile, I.; et al. Stroke Gait Rehabilitation: A Comparison of End-Effector, Overground Exoskeleton, and Conventional Gait Training. Appl. Sci. 2019, 9, 2627. [Google Scholar] [CrossRef] [Green Version]
- Morone, G.; Paolucci, S.; Cherubini, A.; De Angelis, D.; Venturiero, V.; Coiro, P.; Iosa, M. Robot-assisted gait training for stroke patients: Current state of the art and perspectives of robotics. Neuropsychiatr. Dis. Treat. 2017, 13, 1303–1311. [Google Scholar] [CrossRef] [Green Version]
- Hsu, T.H.; Tsai, C.L.; Chi, J.Y.; Hsu, C.Y.; Lin, Y.N. Effect of wearable exoskeleton on post-stroke gait: A systematic review and meta-analysis. Ann. Phys. Rehabil. Med. 2022, 101, 186–192. [Google Scholar] [CrossRef]
- Taki, S.; Iwamoto, Y.; Imura, T.; Mitsutake, T.; Tanaka, R. Effects of gait training with the Hybrid Assistive Limb on gait ability in stroke patients: A systematic review of randomized controlled trials. J. Clin. Neurosci. 2022, 101, 186–192. [Google Scholar] [CrossRef]
- Lorusso, M.; Tramontano, M.; Casciello, M.; Pece, A.; Smania, N.; Morone, G.; Tamburella, F. Efficacy of Overground Robotic Gait Training on Balance in Stroke Survivors: A Systematic Review and Meta-Analysis. Brain Sci. 2022, 12, 713. [Google Scholar] [CrossRef]
- Infarinato, F.; Romano, P.; Goffredo, M.; Ottaviani, M.; Galafate, D.; Gison, A.; Petruccelli, S.; Pournajaf, S.; Franceschini, M. Functional Gait Recovery after a Combination of Conventional Therapy and Overground Robot-Assisted Gait Training Is Not Associated with Significant Changes in Muscle Activation Pattern: An EMG Preliminary Study on Subjects Subacute Post Stroke. Brain Sci. 2021, 11, 448. [Google Scholar] [CrossRef]
- Goffredo, M.; Infarinato, F.; Pournajaf, S.; Romano, P.; Ottaviani, M.; Pellicciari, L.; Galafate, D.; Gabbani, D.; Gison, A.; Franceschini, M. Barriers to sEMG Assessment During Overground Robot-Assisted Gait Training in Subacute Stroke Patients. Front. Neurol. 2020, 11, 564067. [Google Scholar] [CrossRef]
- Tamburella, F.; Tagliamonte, N.L.; Pisotta, I.; Masciullo, M.; Arquilla, M.; van Asseldonk, E.H.F.; van der Kooij, H.; Wu, A.R.; Dzeladini, F.; Ijspeert, A.J.; et al. Neuromuscular Controller Embedded in a Powered Ankle Exoskeleton: Effects on Gait, Clinical Features and Subjective Perspective of Incomplete Spinal Cord Injured Subjects. IEEE Trans. Neural. Syst. Rehabil. Eng. 2020, 28, 1157–1167. [Google Scholar] [CrossRef] [PubMed]
- Afzal, T.; Zhu, F.; Tseng, S.C.; Lincoln, J.; Francisco, G.; Su, H.; Chang, S.H. Evaluation of Muscle Synergy during Exoskeleton-assisted Walking in Persons with Multiple Sclerosis. IEEE Trans. Biomed. Eng. 2022. online ahead of print. [Google Scholar] [CrossRef] [PubMed]
- Raab, K.; Krakow, K.; Tripp, F.; Jung, M. Effects of training with the ReWalk exoskeleton on quality of life in incomplete spinal cord injury: A single case study. Spinal Cord. Ser. Cases 2016, 2, 15025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bissolotti, L.; Nicoli, F.; Picozzi, M. Domestic Use of the Exoskeleton for Gait Training in Patients with Spinal Cord Injuries: Ethical Dilemmas in Clinical Practice. Front. Neurosci. 2018, 12, 78. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bayon, C.; Delgado-Oleas, G.; Avellar, L.; Bentivoglio, F.; Di Tommaso, F.; Tagliamonte, N.L.; Rocon, E.; van Asseldonk, E.H.F. Development and Evaluation of BenchBalance: A System for Benchmarking Balance Capabilities of Wearable Robots and Their Users. Sensors 2021, 22, 119. [Google Scholar] [CrossRef]
- Swank, C.; Wang-Price, S.; Gao, F.; Almutairi, S. Walking With a Robotic Exoskeleton Does Not Mimic Natural Gait: A Within-Subjects Study. JMIR Rehabil. Assist. Technol. 2019, 6, e11023. [Google Scholar] [CrossRef]
- Torricelli, D.; Rodriguez-Guerrero, C.; Veneman, J.F.; Crea, S.; Briem, K.; Lenggenhager, B.; Beckerle, P. Benchmarking Wearable Robots: Challenges and Recommendations From Functional, User Experience, and Methodological Perspectives. Front. Robot. AI 2020, 7, 561774. [Google Scholar] [CrossRef]
- Torricelli, D.; Veneman, J.; Gonzalez-Vargas, J.; Mombaur, K.; Remy, C.D. Editorial: Assessing Bipedal Locomotion: Towards Replicable Benchmarks for Robotic and Robot-Assisted Locomotion. Front. Neurorobot. 2019, 13, 86. [Google Scholar] [CrossRef] [Green Version]
- Tefertiller, C.; Hays, K.; Jones, J.; Jayaraman, A.; Hartigan, C.; Bushnik, T.; Forrest, G.F. Initial Outcomes from a Multicenter Study Utilizing the Indego Powered Exoskeleton in Spinal Cord Injury. Top Spinal Cord Inj. Rehabil. 2018, 24, 78–85. [Google Scholar] [CrossRef]
- Saggio, G.; Tombolini, F.; Ruggiero, A. Technology-Based Complex Motor Tasks Assessment: A 6-DOF Inertial-Based System Versus a Gold-Standard Optoelectronic-Based One. IEEE Sens. J. 2021, 21, 1616–1624. [Google Scholar] [CrossRef]
- Hayes, S.C.; White, M.; Wilcox, C.R.J.; White, H.S.F.; Vanicek, N. Biomechanical differences between able-bodied and spinal cord injured individuals walking in an overground robotic exoskeleton. PLoS ONE 2022, 17, e0262915. [Google Scholar] [CrossRef] [PubMed]
- Park, J.H.; Kim, S.; Nussbaum, M.A.; Srinivasan, D. Effects of back-support exoskeleton use on gait performance and stability during level walking. Gait Posture 2022, 92, 181–190. [Google Scholar] [CrossRef] [PubMed]
- Laubscher, C.A.; Goo, A.; Farris, R.J.; Sawicki, J.T. Hybrid Impedance-Sliding Mode Switching Control of the Indego Explorer Lower-Limb Exoskeleton in Able-Bodied Walking. J. Intell. Robot. Syst. 2022, 104, 76. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gender | Age | Height (cm) | Weight (kg) | |
|---|---|---|---|---|
| Subj A | M | 26 | 187 | 74 |
| Subj B | F | 33 | 160 | 58 |
| Subj C | F | 24 | 172 | 60 |
| Subj D | F | 43 | 163 | 56 |
| Subj E | M | 27 | 172 | 72 |
| Regular Terrain | Irregular Terrain | ||||||
|---|---|---|---|---|---|---|---|
| Indoor | Descending Slope | Ascending Slope | High Speed | Normal Speed | Low Speed | ||
| cadence (step/min) | WPE | 22.02 ± 0.55 | 23.30 ± 0.25 | 22.38 ± 0.41 | 26.31 ± 0.7 | 22.65 ± 0.33 | 19.90 ± 0.32 |
| no-WPE | 52.66 ± 1.69 | 50.74 ± 2.4 | 48.84 ± 1.98 | 59.76 ± 4.13 | 49.72 ± 2.20 | 41.85 ± 4.95 | |
| gait cycle (s) | WPE | 2.75 ± 0.07 | 2.59 ± 0.02 | 2.70 ± 0.04 | 2.30 ± 0.06 | 2.66 ± 0.03 | 3.03 ± 0.04 |
| no-WPE | 1.16 ± 0.04 | 1.21 ± 0.06 | 1.25 ± 0.04 | 1.04 ± 0.08 | 1.23 ± 0.05 | 1.65 ± 0.38 | |
| Double support (×100 s) | WPE | 1.89 ± 0.06 | 1.79 ± 0.04 | 1.77 ± 0.10 | 1.51 ± 0.04 | 1.78 ± 0.06 | 2.07 ± 0.03 |
| no-WPE | 0.83 ± 0.02 | 0.84 ± 0.06 | 0.83 ± 0.08 | 0.70 ± 0.08 | 0.83 ± 0.03 | 0.87 ± 0.09 | |
| stance (s) | WPE | 1.57 ± 0.06 | 1.45 ± 0.03 | 1.55 ± 0.08 | 1.34 ± 0.06 | 1.55 ± 0.05 | 1.73 ± 0.04 |
| no-WPE | 0.59 ± 0.01 | 0.58 ± 0.03 | 0.64 ± 0.05 | 0.53 ± 0.05 | 0.62 ± 0.01 | 0.67 ± 0.10 | |
| swing (s) | WPE | 1.17 ± 0.04 | 1.13 ± 0.03 | 1.14 ± 0.09 | 0.95 ± 0.02 | 1.1 ± 0.02 | 1.29 ± 0.03 |
| no-WPE | 0.56 ± 0.04 | 0.63 ± 0.05 | 0.6 ± 0.04 | 0.51 ± 0.03 | 0.61 ± 0.05 | 0.98 ± 0.29 | |
| Regular Terrain | Irregular Terrain | |||||||
|---|---|---|---|---|---|---|---|---|
| Indoor | Descending Slope | Ascending Slope | High Speed | Normal Speed | Low Speed | |||
| Min, Max | Min, Max | Min, Max | Min, Max | Min, Max | Min, Max | |||
| Hip | A-A | WPE | −6.26, 6.49 | −3.21, 5.28 | −4.99, 5.86 | −5.49, 3.95 | −4.24, 4.00 | −4.02, 4.59 |
| no-WPE | −10.52, 8.01 | −5.10, 7.47 | −5.05, 8.12 | −4.46, 10.27 | −9.99, 6.48 | −8.5, 8.14 | ||
| F-E | WPE | −2.79, 57.11 | −2.39, 58.42 | −2.24, 58.57 | −1.74, 60.16 | −1.51, 59.56 | −0.36, 59.20 | |
| no-WPE | −10.54, 25.02 | −12.22, 24.47 | −11.4, 32.47 | −13.02, 34.4 | −12.83, 27.78 | −11.5, 17.39 | ||
| Knee | F-E | WPE | −2.43, 71.72 | −1.14, 71.18 | −3.6, 72.58 | −3.60, 69.99 | −3.23, 70.72 | −3.33, 70.86 |
| no-WPE | −0.62, 69.63 | −2.02, 71.52 | −1.92, 60.6 | −2.88, 63.37 | −3.03, 67.7 | −5.39, 60.63 | ||
| R | WPE | 0.64, 7.54 | −2.66, 5.91 | −2.49, 5.92 | −1.38, 8.79 | −4.11, 4.81 | −0.93, 7.53 | |
| no-WPE | −8.58, 8.50 | −8.68, 7.16 | −6.76, 10.14 | −25.55, −6.23 | −8.00, 9.75 | −4.96, 13.53 | ||
| Ankle | DPF | WPE | −9.59, 7.60 | −13.44, 4.29 | −9.89, 10.70 | −16.83, 6.36 | −13.32, 5.15 | −11.92, 2.63 |
| no-WPE | −16.27, 15.11 | −11.5, 14.59 | −13.69, 15.20 | −14.65, 16.95 | −13.44, 14.32 | −17.36, 14.55 | ||
| FP | WPE | −11.84, 1.30 | −9.24, 2.61 | −14.92, 2.73 | −9.78, 5.31 | −8.85, 3.73 | −8.52, 2.09 | |
| no-WPE | −11.05, 5.75 | −6.98, 4.86 | −9.55, 4.14 | 6.73, 21.50 | −8.66, 5.67 | −5.58, 11.22 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goffredo, M.; Romano, P.; Infarinato, F.; Cioeta, M.; Franceschini, M.; Galafate, D.; Iacopini, R.; Pournajaf, S.; Ottaviani, M. Kinematic Analysis of Exoskeleton-Assisted Community Ambulation: An Observational Study in Outdoor Real-Life Scenarios. Sensors 2022, 22, 4533. https://doi.org/10.3390/s22124533
Goffredo M, Romano P, Infarinato F, Cioeta M, Franceschini M, Galafate D, Iacopini R, Pournajaf S, Ottaviani M. Kinematic Analysis of Exoskeleton-Assisted Community Ambulation: An Observational Study in Outdoor Real-Life Scenarios. Sensors. 2022; 22(12):4533. https://doi.org/10.3390/s22124533
Chicago/Turabian StyleGoffredo, Michela, Paola Romano, Francesco Infarinato, Matteo Cioeta, Marco Franceschini, Daniele Galafate, Rebecca Iacopini, Sanaz Pournajaf, and Marco Ottaviani. 2022. "Kinematic Analysis of Exoskeleton-Assisted Community Ambulation: An Observational Study in Outdoor Real-Life Scenarios" Sensors 22, no. 12: 4533. https://doi.org/10.3390/s22124533
APA StyleGoffredo, M., Romano, P., Infarinato, F., Cioeta, M., Franceschini, M., Galafate, D., Iacopini, R., Pournajaf, S., & Ottaviani, M. (2022). Kinematic Analysis of Exoskeleton-Assisted Community Ambulation: An Observational Study in Outdoor Real-Life Scenarios. Sensors, 22(12), 4533. https://doi.org/10.3390/s22124533