
Feudalistic Platooning: Subdivide Platoons, Unite Networks, and Conquer Efficiency and Reliability


Abstract
1. Introduction
2. Related Work, Contribution, and Outline
2.1. Related Work
2.2. Contribution
- We present Feudalistic Platooning, an extensive platooning concept including a vehicle and a platoon layer. It uses hybrid networking targeting both safety- and efficiency-related bottlenecks caused by communication deficiencies and surrounding traffic. Within a platoon, the message flow is steered by diversified role-based communication which unites either two only or alternatively many more communication networks and technologies.
- We employ IEEE 802.11p and cellular V2X (C-V2X) and discuss how to improve operability, coexistence with surrounding traffic, and modularity, to relieve networks, to compensate network outages, and to increase efficiency. For C-V2X, we do not consider 5G but LTE. However, these are interchangeable.
- We simulate Feudalistic Platooning, analyze the data flow and load using a comprehensive, open source suite for inter-vehicle communication simulation, and discuss its impact.
2.3. Outline
3. Vehicular Communication
- Unicast: data are sent from the transmitter to one receiver using a dedicated link. In the event of multiple nodes receiving the same message, the same number of transmissions and links as receivers are necessary.
- Broadcast: data are sent from the transmitter over a single link that is shared by all nodes. Even though only one transmission is necessary, all nodes are able to receive the data.
- Multicast: similar to broadcast, but the link is only shared by some nodes. Geocast is a special form of multicast, where nodes are identified by their geographical locations.
3.1. Ad Hoc Network
3.2. Cellular Network
3.3. Hybrid Networking
3.4. Platooning
3.5. Nomenclature
4. Feudalistic Platooning
4.1. Background
4.2. Concept
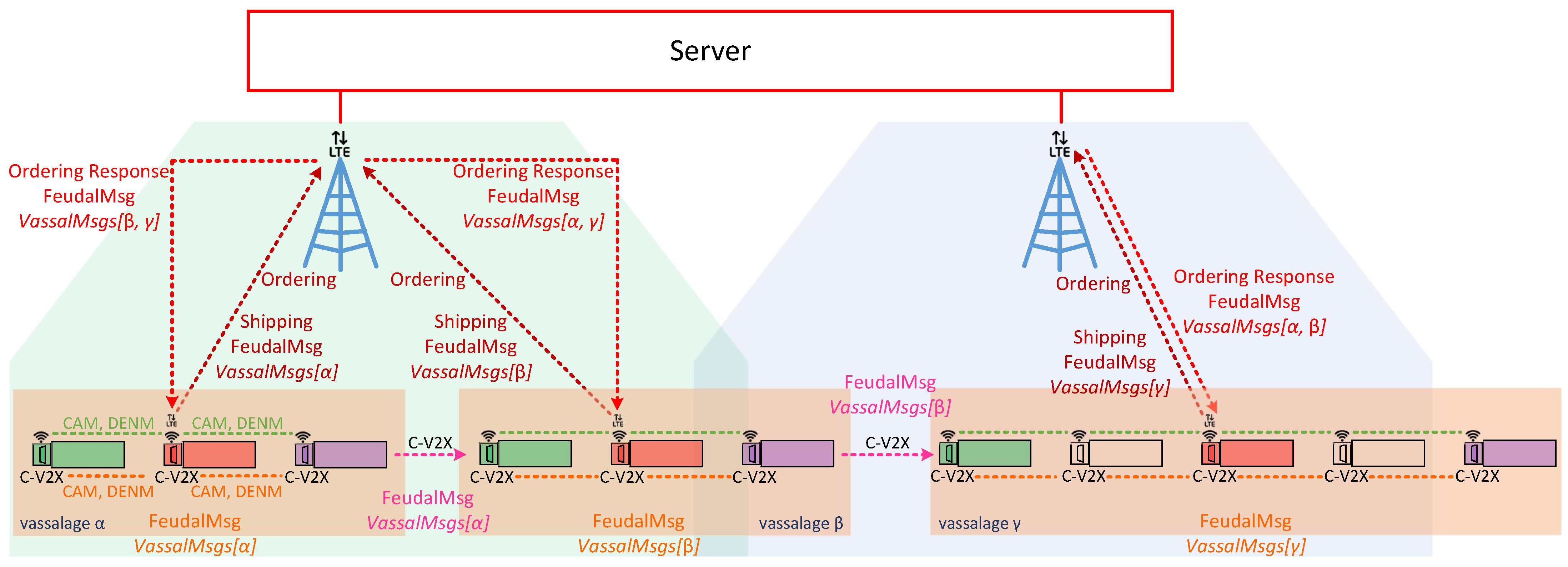
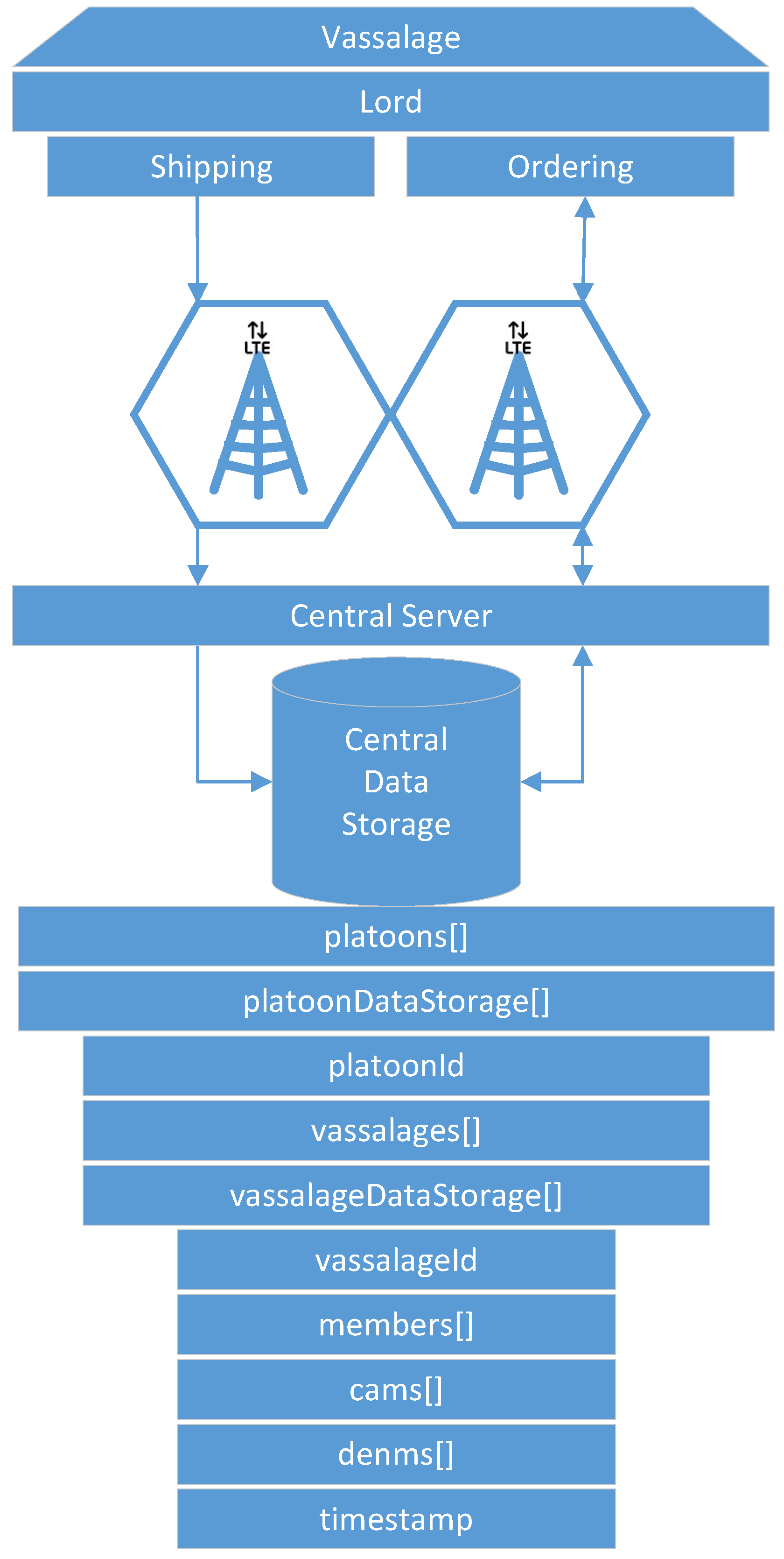
- Lord (IV): the mid vehicle of the vassalage responsible for shipping data, i.e., it collects vehicle status and event information from all vehicles within its vassalage which it regularly reports to a central server. Furthermore, it performs ordering, i.e., it periodically requests information from other vassalages at the central server. Cellular coverage is required to do this. Received data may be shared among all vehicles of the vassalage using C-V2X that is available both in and outside of cellular coverage. The selection of the mid vehicle ensures the shortest communication paths. One of the two mid vehicles may be selected in the event of an even number of vehicles in the vassalage.
- Knight (III): the first vehicle of the vassalage receives data over C-V2X from the merchant of the preceding vassalage when there is one in this position. It may distribute the received data among all vehicles within the vassalage, again using C-V2X. The selection of the first vehicle ensures the closest communication distance to preceding vassalage.
- Merchant (II): the last vehicle of the vassalage which collects status and event information from all vehicles within its vassalage which it sends to its follower, i.e., the knight of following vassalage—if there is one. C-V2X is used to transmit the data. Selecting the last vehicle ensures the closest communication distance to the following vassalage.
- Peasant (I): any remaining vehicle within the vassalage which does not have to handle additional communication tasks.
- Claimant: the vehicle part of a platoon and ready to perform Feudalistic Platooning.
- Outlaw: the vehicle part of a platoon not ready/capable of performing Feudalistic Platooning.
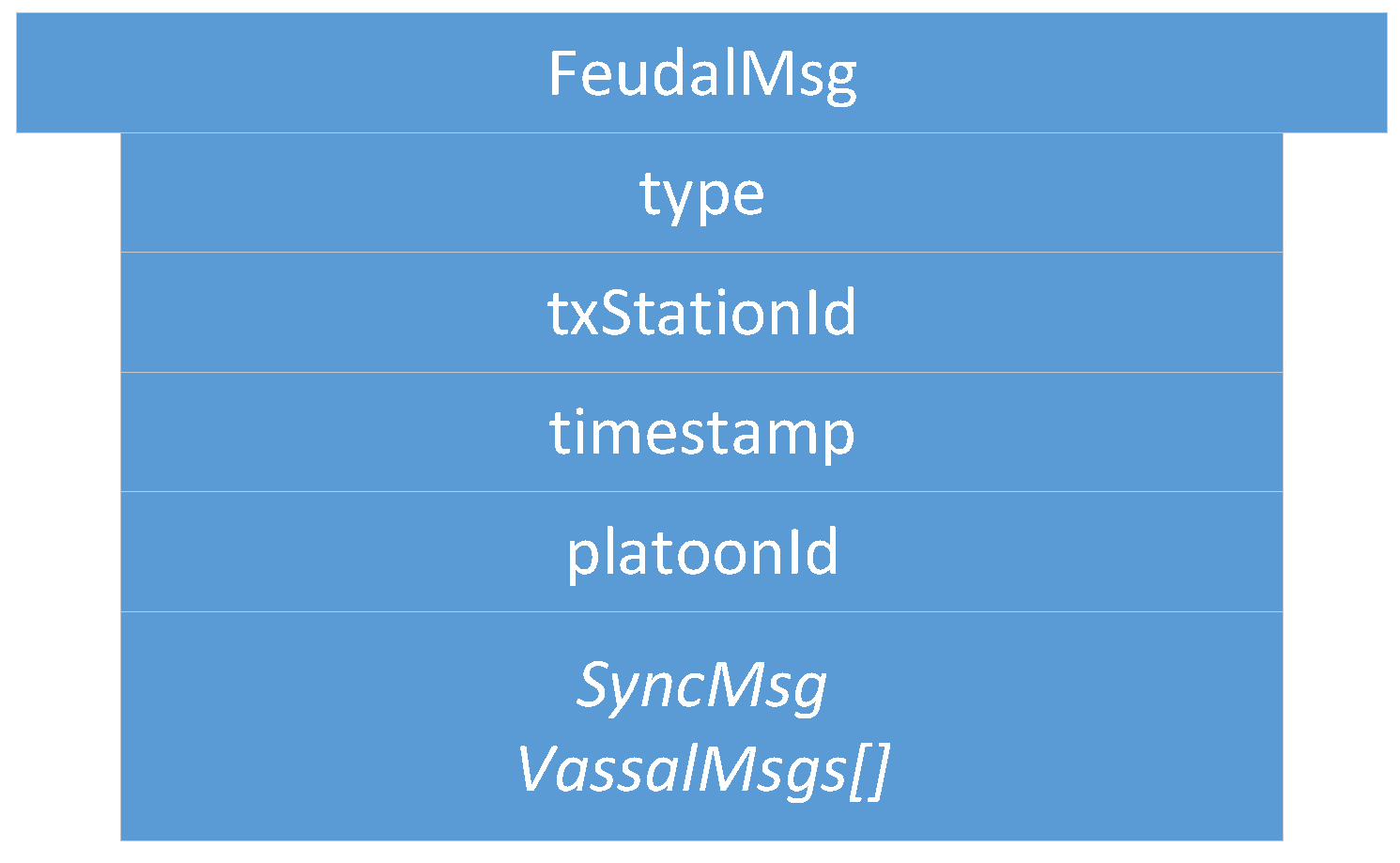
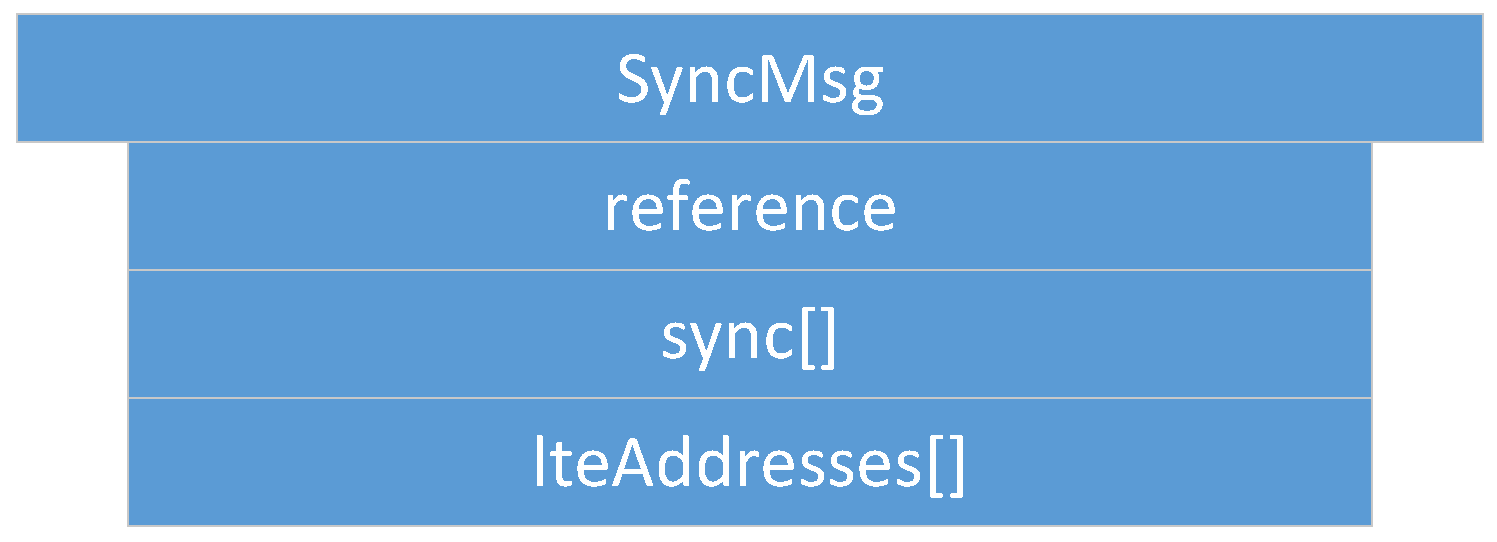
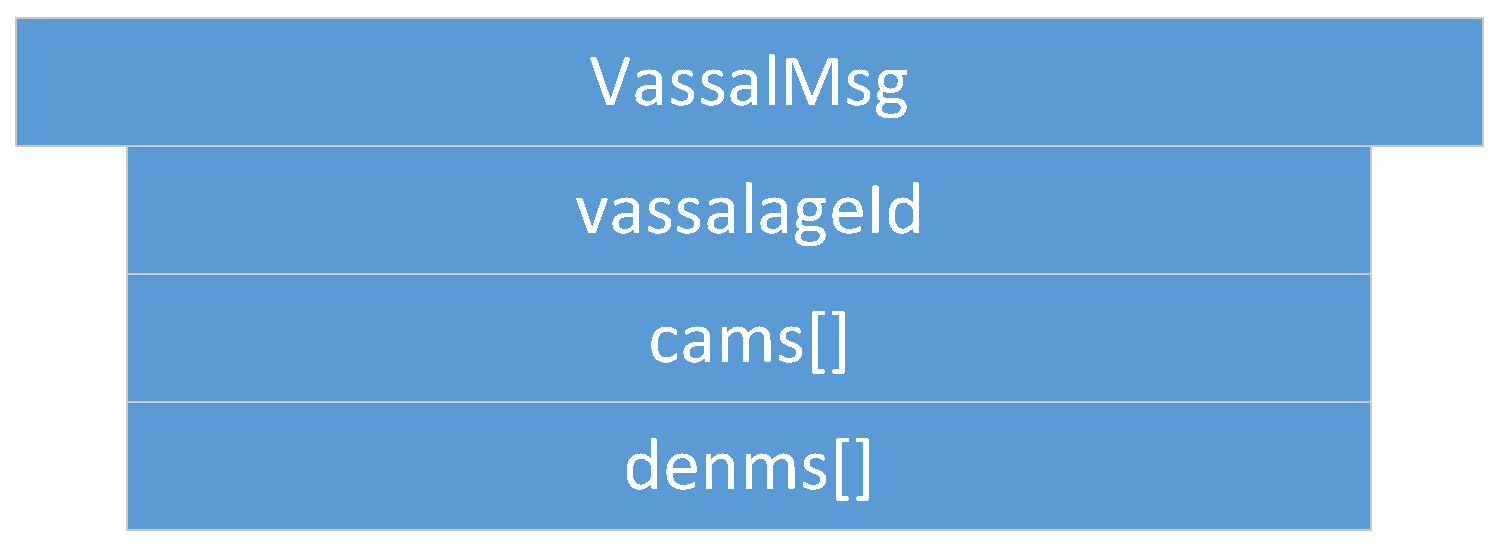
4.3. Messaging
4.4. Synchronization
- Core members are lord, knight, merchant and all the peasants of the dedicated vassalage;
- Peripheral members are merchant and knight of preceding, respectively, the following vassalages.
- Synchronization time: as at least every vehicle needs to send one packet, having fewer vehicles that need to exchange data accelerates the synchronization process.
- Network load: the required data are from vehicles that are geographically very closely grouped. This ensures short communication distances, avoiding packet forwarding to reach all vehicles of the platoon: most of the time, a single packet transmission by a vehicle may be sufficient.Furthermore, in busy networks, the transmission power could be reduced to such an extent that only very few vehicles are actually able to receive the messages. This may lead to packet forwarding but with small vassalage sizes, synchronization is still possible at a decent speed.
- Robustness: less packet forwarding and less vehicles that need to synchronize increase the reliability of successful, collision free packet transmission and does not stress the network unnecessarily. This increases the robustness in comparison to that of centralized synchronization.
- Frequency reuse: as communication is geographically bonded to a small area of the platoon, the same frequency (channel) may be reused in another part of the platoon.
- Operability: outside the vassalage, the platoon is still open for platoon maneuvers, e.g., to join, leave, merge, or split.
4.5. Central Server
4.6. Timers
4.7. Vassalage Size
5. Results
5.1. Simulation Scenario
5.2. Evaluation
5.3. Validation and Impact
- Relieve networks:
- Ad hoc networkCommunication that uses the ad hoc network is limited to one vassalage. On the one hand, a vassalage may agree on a specific communication channel that would ensure no interference for neighboring vassalages. On the other hand, transmission power may be reduced as broadcasted information is only of interest within the vassalage and is therefore short-ranged. This enables earlier frequency reuse.
- LTE networkOnly one single vehicle per vassalage, namely the lord, accesses the cellular network using LTE communication. This decreases the communication overhead including the number of communication requests and simplifies the resource scheduling within the cellular network. This does not, however, reduce the net payload.
- Improved operability:Operability does not depend on the quality of the network: once in coverage, the platoon may be updated downstream and upstream, e.g., about new platoon members. All platoon members are aware of each other. Out of coverage, this reduces transmissions by design to a bare minimum. Here, communication is limited to a single vassalage and C-V2X updates from the preceding vassalage. However, control policy should be selected appropriately: required data may come from the current or preceding vassalage.
- Increased efficiency:Except for the knight of each vassalage, vehicles of single vassalages benefit from the short inter-vehicle distances, which increase platoon efficiency. Furthermore, negative influences from the surrounding traffic are limited as the vassalages are inseparable.
- Improved coexistence:Large inter-vehicle distance between two vassalages reserve room for the surrounding traffic and unforeseeable maneuvers and create credit for emergencies.
- Improved modularity:Vassalages may be built up on a situational basis and according to different indicators such as a common destination or driver availability. Furthermore, a quicker integration of entire vassalages into other platoons is enabled, instead of exiting and rejoining the individual vehicles.
- Low overhead:Once Feudalistic Platooning is established, communication is purely data based and no additional management data are required.
- Circumvent handover problem:Due to the fact that only one vehicle per vassalage is connected via LTE to the cellular network, the data dependency of different cells is not given. Whatever cell the lord is part of, its whole vassalage is also part of, even though technically they would already have switched cell.
5.4. Framing within Recent Selected Publications
- The connection of all vehicles at any point in time: independent of the used communication technology, listed publications assume the connection of all vehicles at any point in time. This cannot be guaranteed under all circumstances and thus, the operability of the platoon is questionable. Especially when only cellular networks are used, handover scenarios lead to temporary connection losses. We explain in Section 5.3 how Feudalistic Platooning stays operable and circumvents handover problems.
- Strong data dependency: listed publications introduce strong data dependency, either assuming each vehicle is aware of every other vehicle or leader information is available throughout the platoon. This causes a large uplink and consequently also large downlink data traffic in cellular networks and drastically increases the ad hoc network load once single broadcasts are no longer sufficient. Feudalistic Platooning is able to steer message flow according to the needs of the vehicle controller. Critical data can be exchanged on a time-variable basis. Non-critical data are exchanged whenever possible (see Section 5.3).
- Network election: publications that consider the availability of both ad hoc and cellular networks assume that the data needed for the vehicle layer are exchanged using the ad hoc network. In contrast to that, data for upper layers are exchanged using the cellular network. However, the selection of the communication technology, e.g., on per-packet basis [12], would be possible at least for the vehicle layer and partly for the platoon layer. Feudalistic Platooning exploits the availability of multiple networks and adds redundancy on critical data. Data from higher layers can still be transmitted. Their timescale is increased anyways and thus, their criticality decreases [42].
- Heterogeneous platoons: vehicles within a platoon are heterogeneous by nature. Vehicles differ in type and in load. Thus, they offer different acceleration and deceleration capabilities. This needs to be considered by the vehicle layer [20]. In Feudalistic Platooning, vassalages can be used to group vehicles according to different indicators, e.g., according to their braking capability.
- Surrounding traffic and its variability: considering surrounding traffic is challenging. Increased inter-vehicle distance between two vassalages in a feudalistic platoon considers surrounding traffic already up-front. Variable vassalage size can counteract time-variable traffic density and its impact on the network quality (see Section 5.3).
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 5G | Fifth-Generation Technology Standard for Broadband Cellular Networks |
| CAM | Cooperative Awareness Message |
| C-ITS | Cooperative Intelligent Transportation Systems |
| CPM | Collective Perception Message |
| CSMA/CA | Carrier Sense Multiple Access/Collision Avoidance |
| C-V2X | Cellular Vehicle to Everything |
| DENM | Decentralized Environmental Notification Message |
| HGV | Heavy Goods Vehicle |
| IEEE | Institute of Electrical and Electronics Engineers |
| LTE | Long-Term Evolution |
| PRR | Packet Reception Rate |
| SUMO | Simulation of Urban Mobility |
| V2X | Vehicle to Everything |
| VLC | Visible Light Communication |
References
- Bonnet, C.; Fritz, H. Fuel Consumption Reduction in a Platoon: Experimental Results with Two Electronically Coupled Trucks at Close Spacing; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2000. [Google Scholar]
- Hellström, E. Look-Ahead Control of Heavy Vehicles. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2010. [Google Scholar]
- Hussein, A.; Rakha, H. Vehicle Platooning Impact on Drag Coefficients and Energy/Fuel Saving Implications. IEEE Trans. Veh. Technol. 2022, 71, 1199–1208. [Google Scholar] [CrossRef]
- Lammert, M.P.; Duran, A.; Diez, J.; Burton, K.; Nicholson, A. Effect of Platooning on Fuel Consumption of Class 8 Vehicles Over a Range of Speeds, Following Distances, and Mass. SAE Int. J. Commer. Veh. 2014, 7, 626–639. [Google Scholar] [CrossRef]
- Highway Research Board. Special Report 87: Highway Capacity Manual; Highway Research Board: Washington, DC, USA, 1965. [Google Scholar]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Harwood, N.; Reed, N. Modelling the impact of platooning on motorway capacity. In Proceedings of the Road Transport Information and Control Conference 2014 (RTIC 2014), London, UK, 6–7 October 2014; IET: London, UK, 2014; pp. 1–6. [Google Scholar]
- Taxonomy and Definitions for Terms Related to Cooperative Driving Automation for On-Road Motor Vehicles. Standard; SAE International: Warrendale, PA, USA, 2021.
- Alam, A.; Besselink, B.; Turri, V.; Mårtensson, J.; Johansson, K.H. Heavy-Duty Vehicle Platooning for Sustainable Freight Transportation: A Cooperative Method to Enhance Safety and Efficiency. IEEE Control. Syst. Mag. 2015, 35, 34–56. [Google Scholar] [CrossRef]
- Boubakri, A.; Gammar, S.M. Intra-platoon communication in autonomous vehicle: A survey. In Proceedings of the 2020 9th IFIP International Conference on Performance Evaluation and Modeling in Wireless Networks (PEMWN), Berlin, Germany, 1–3 December 2020; pp. 1–6. [Google Scholar]
- Serizawa, K.; Mikami, M.; Moto, K.; Yoshino, H. Field trial activities on 5G NR V2V direct communication towards application to truck platooning. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Gopinath, S.; Wischhof, L.; Ponikwar, C.; Hof, H.J. Hybrid solutions for data dissemination in vehicular networks. In Proceedings of the 2016 Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Han, C.; Dianati, M.; Tafazolli, R.; Kernchen, R.; Shen, X. Analytical Study of the IEEE 802.11p MAC Sublayer in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2012, 13, 873–886. [Google Scholar] [CrossRef]
- Segata, M.; Arvani, P.; Lo Cigno, R. A Critical Assessment of C-V2X Resource Allocation Scheme for Platooning Applications. In Proceedings of the 2021 16th Annual Conference on Wireless On-demand Network Systems and Services Conference (WONS), Klosters, Switzerland, 9–11 March 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Segata, M.; Cigno, R.L.; Tsai, H.M.M.; Dressler, F. On platooning control using IEEE 802.11 p in conjunction with visible light communications. In Proceedings of the 2016 12th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Cortina d’Ampezzo, Italy, 20–22 January 2016; pp. 1–4. [Google Scholar]
- Ishihara, S.; Rabsatt, R.V.; Gerla, M. Improving reliability of platooning control messages using radio and visible light hybrid communication. In Proceedings of the 2015 IEEE Vehicular Networking Conference (VNC), Kyoto, Japan, 16–18 December 2015; pp. 96–103. [Google Scholar]
- Mannoni, V.; Berg, V.; Sesia, S.; Perraud, E. A Comparison of the V2X Communication Systems: ITS-G5 and C-V2X. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Mir, Z.H.; Filali, F. LTE and IEEE 802.11p for vehicular networking: A performance evaluation. J. Wirel. Commun. Netw. 2014, 2014, 89. [Google Scholar]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Renzler, T.; Stolz, M.; Watzenig, D. Decentralized dynamic platooning architecture with v2v communication tested in omnet++. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–9 November 2019; pp. 1–6. [Google Scholar]
- Lee, G.; Jung, J.I. Decentralized Platoon Join-in-Middle Protocol Considering Communication Delay for Connected and Automated Vehicle. Sensors 2021, 21, 7126. [Google Scholar] [CrossRef] [PubMed]
- Renzler, T.; Stolz, M.; Watzenig, D. Looking into the Path Future: Extending CAMs for Cooperative Event Handling. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Virtual, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Badnava, S.; Meskin, N.; Gastli, A.; Al-Hitmi, M.A.; Ghommam, J.; Mesbah, M.; Mnif, F. Platoon Transitional Maneuver Control System: A Review. IEEE Access 2021, 9, 88327–88347. [Google Scholar] [CrossRef]
- Balador, A.; Bazzi, A.; Hernandez-Jayo, U.; de la Iglesia, I.; Ahmadvand, H. A survey on vehicular communication for cooperative truck platooning application. Veh. Commun. 2022, 35, 100460. [Google Scholar] [CrossRef]
- Anwar, W.; Franchi, N.; Fettweis, G. Physical layer evaluation of V2X communications technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11 bd, and IEEE 802.11 p. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar]
- Saad, A.; Rahem, A.T.; Hussein, A.J.; Mohammed, A.A. Vehicular Ad Hoc Networks: Growth and Survey for Three Layers. Int. J. Electr. Comput. Eng. (IJECE) 2017, 7, 271. [Google Scholar] [CrossRef]
- Dimou, K.; Wang, M.; Yang, Y.; Kazmi, M.; Larmo, A.; Pettersson, J.; Muller, W.; Timner, Y. Handover within 3GPP LTE: Design Principles and Performance. In Proceedings of the 2009 IEEE 70th Vehicular Technology Conference Fall, Anchorage, AK, USA, 20–23 September 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Manganaro, G.; Leenaerts, D. Chapter 1—Wireless Infrastructure. In Advances in Analog and RF IC Design for Wireless Communication Systems; Manganaro, G., Leenaerts, D., Eds.; Academic Press: Oxford, UK, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Cellular V2X Communications in Unlicensed Spectrum: Harmonious Coexistence With VANET in 5G Systems. IEEE Trans. Wirel. Commun. 2018, 17, 5212–5224. [Google Scholar] [CrossRef]
- Tung, L.C.; Mena, J.; Gerla, M.; Sommer, C. A cluster based architecture for intersection collision avoidance using heterogeneous networks. In Proceedings of the 2013 12th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Ajaccio, France, 24–26 June 2013; pp. 82–88. [Google Scholar] [CrossRef]
- Garbiso, J.; Diaconescu, A.; Coupechoux, M.; Leroy, B. Dynamic cluster size optimization in hybrid cellular-vehicular networks. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 557–563. [Google Scholar] [CrossRef]
- Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for vehicular networking: A survey. IEEE Commun. Mag. 2013, 51, 148–157. [Google Scholar] [CrossRef]
- ETSI EN 302 637-2 V1.4.1; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service. Standard. European Telecommunications Standards Institute: Sophia Antipolis, France, 2019.
- ETSI EN 302 637-3 V1.3.1; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service. Standard. European Telecommunications Standards Institute: Sophia Antipolis, France, 2019.
- ETSI TR 103 562 V2.1.1; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Analysis of the Collective Perception Service (CPS); Release 2. Standard. European Telecommunications Standards Institute: Sophia Antipolis, France, 2019.
- Rupp, A.; Stolz, M. Survey on control schemes for automated driving on highways. In Automated Driving; Springer: Berlin/Heidelberg, Germany, 2017; pp. 43–69. [Google Scholar]
- Riebl, R.; Gunther, H.J.; Facchi, C.; Wolf, L. Artery: Extending Veins for VANET applications. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 450–456. [Google Scholar] [CrossRef]
- Virdis, A.; Stea, G.; Nardini, G. Simulating lte/lte-advanced networks with simulte. In Simulation and Modeling Methodologies, Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 83–105. [Google Scholar]
- Yang, M.; Wang, X.; Quddus, M. Examining lane change gap acceptance, duration and impact using naturalistic driving data. Transp. Res. Part Emerg. Technol. 2019, 104, 317–331. [Google Scholar] [CrossRef]
- Breu, J.; Brakemeier, A.; Menth, M. A quantitative study of Cooperative Awareness Messages in production VANETs. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 1–18. [Google Scholar] [CrossRef]
- Hoef, S.V.D.; Mårtensson, J.; Dimarogonas, D.V.; Johansson, K.H. A predictive framework for dynamic heavy-duty vehicle platoon coordination. ACM Trans. Cyber-Phys. Syst. 2019, 4, 1–25. [Google Scholar] [CrossRef]
- Eilers, S.; Mårtensson, J.; Pettersson, H.; Pillado, M.; Gallegos, D.; Tobar, M.; Johansson, K.H.; Ma, X.; Friedrichs, T.; Borojeni, S.S.; et al. COMPANION—Towards Co-operative Platoon Management of Heavy-Duty Vehicles. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1267–1273. [Google Scholar] [CrossRef]
- Montanaro, U.; Fallah, S.; Dianati, M.; Oxtoby, D.; Mizutani, T.; Mouzakitis, A. Cloud-assisted distributed control system architecture for platooning. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1258–1265. [Google Scholar]
- Quadri, C.; Mancuso, V.; Ajmone Marsan, M.; Rossi, G.P. Platooning on the edge. In Proceedings of the 23rd International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Alicante, Spain, 16–20 November 2020; pp. 1–10. [Google Scholar]
- Sroka, P.; Kliks, A. Towards edge intelligence in the automotive scenario: A discourse on architecture for database-supported autonomous platooning. J. Commun. Netw. 2022, 24, 192–208. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Simulation Time | 300 | s |
| Merchant Interval | 1 | s |
| Ordering Interval | 2 | s |
| Shipping Interval | 2 | s |
| Constant Speed | 30 | m s−1 |
| Platoon Length | 12 | number of vehicles |
| Vassalage Size | 3 | number of vehicles |
| Packet Reception Rate | 100 | % |
| Intra-Vassalage Vehicle Distance | 8 | m |
| Inter-Vassalage Vehicle Distance | 70 | m |
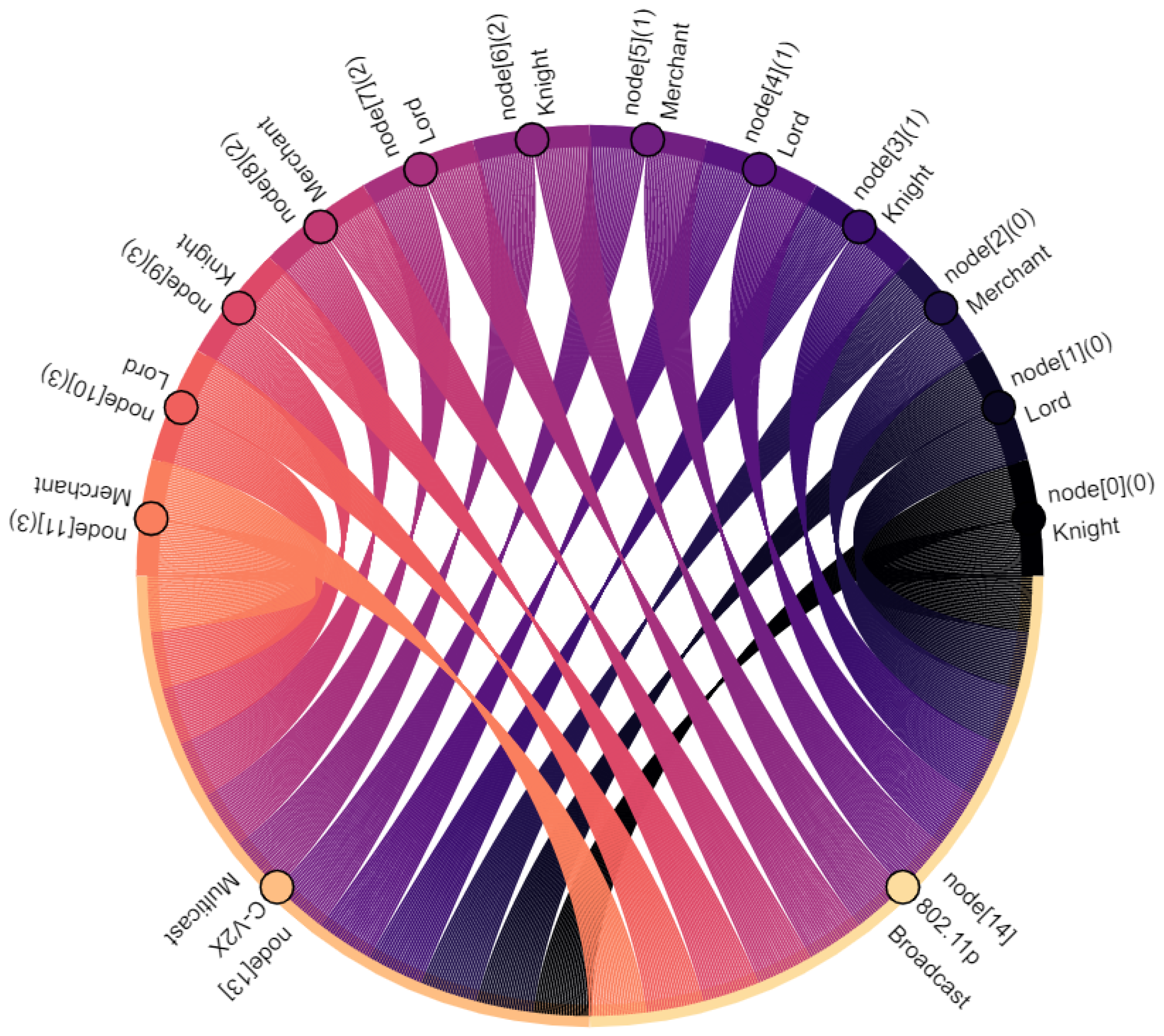
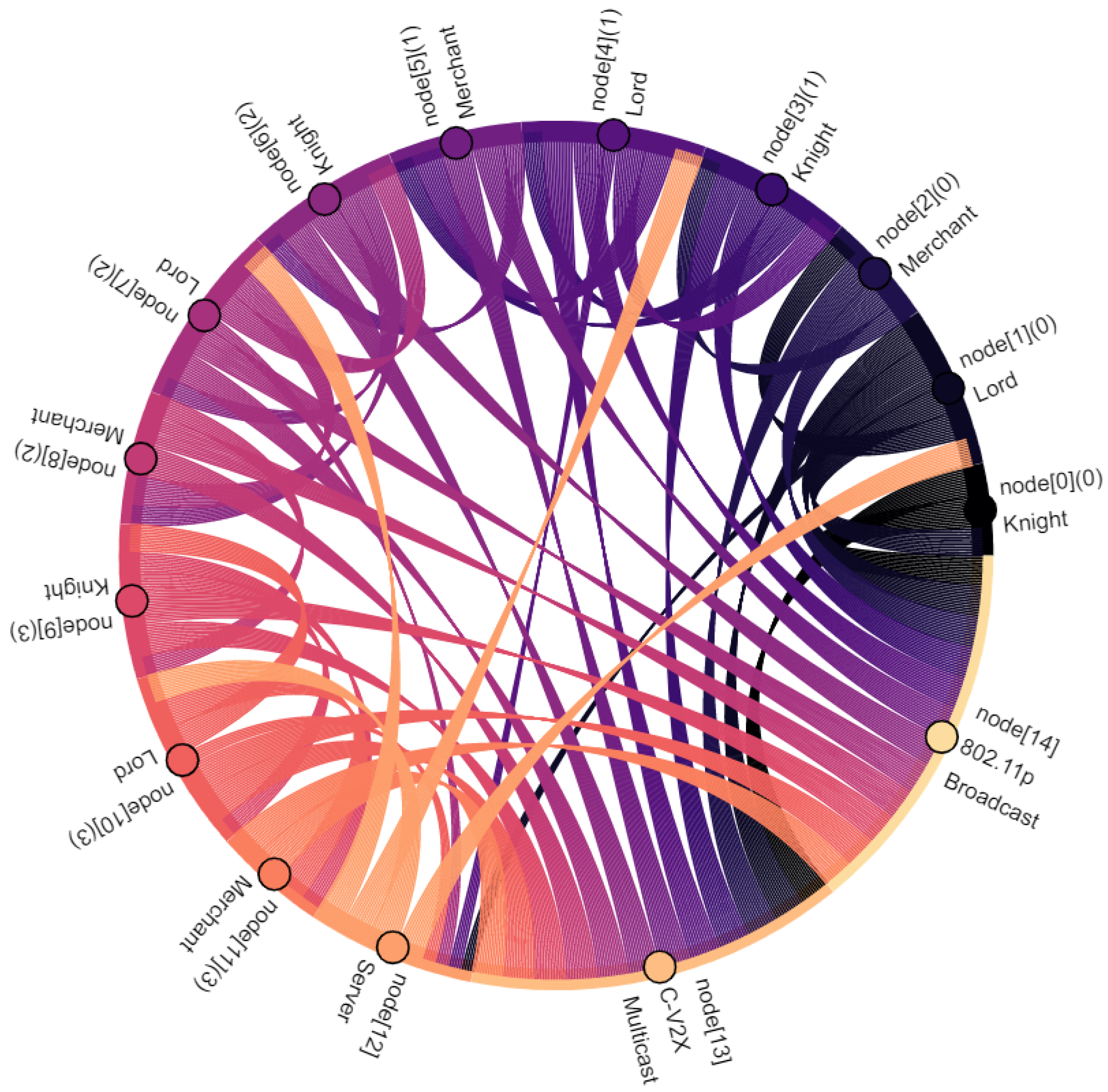
| Type | Node | Role | Value | (*) Share Type | (*) Share Network | (*) Share Overall |
|---|---|---|---|---|---|---|
| kB | % | % | % | |||
| Overall | n.a. | n.a. | 2684 | 100.00 | n.a. | 100.00 |
| node[0] | Knight | 128 | 4.77 | n.a. | 4.77 | |
| node[1] | Lord | 267 | 9.95 | n.a. | 9.95 | |
| node[2] | Merchant | 168 | 6.26 | n.a. | 6.26 | |
| node[3] | Knight | 208 | 7.75 | n.a. | 7.75 | |
| node[4] | Lord | 267 | 9.95 | n.a. | 9.95 | |
| node[5] | Merchant | 168 | 6.26 | n.a. | 6.26 | |
| node[6] | Knight | 208 | 7.75 | n.a. | 7.75 | |
| node[7] | Lord | 267 | 9.95 | n.a. | 9.95 | |
| node[8] | Merchant | 168 | 6.26 | n.a. | 6.26 | |
| node[9] | Knight | 208 | 7.75 | n.a. | 7.75 | |
| node[10] | Lord | 267 | 9.95 | n.a. | 9.95 | |
| node[11] | Merchant | 128 | 4.77 | n.a. | 4.77 | |
| node[12] | Server | 232 | 8.64 | n.a. | 8.64 | |
| node[13] | Multicast | 0 | 0.00 | n.a. | 0.00 | |
| node[14] | Broadcast | 0 | 0.00 | n.a. | 0.00 | |
| IEEE 802.11p Overall | n.a. | n.a. | 768 | 100.00 | 100.00 | 28.61 |
| (CAM, DENM) | node[0–11] | n.a. | 64 | 8.33 | 8.33 | 2.38 |
| C-V2X Overall | n.a. | n.a. | 1584 | 100.00 | 100.00 | 59.02 |
| C-V2X Multicast | n.a. | n.a. | 768 | 100.00 | 48.48 | 28.61 |
| (CAM, DENM) | node[0–11] | n.a. | 64 | 8.33 | 4.04 | 2.38 |
| C-V2X Intra Vassalage | n.a. | n.a. | 696 | 100.00 | 43.94 | 25.93 |
| node[0] | Knight | 0 | 0.00 | 0.00 | 0.00 | |
| node[1] | Lord | 114 | 16.38 | 7.20 | 4.25 | |
| node[3] | Knight | 80 | 11.49 | 5.05 | 2.98 | |
| node[4] | Lord | 114 | 16.38 | 7.20 | 4.25 | |
| node[6] | Knight | 80 | 11.49 | 5.05 | 2.98 | |
| node[7] | Lord | 114 | 16.38 | 7.20 | 4.25 | |
| node[9] | Knight | 80 | 11.49 | 5.05 | 2.98 | |
| node[10] | Lord | 114 | 16.38 | 7.20 | 4.25 | |
| C-V2X Inter Vassalage | n.a. | n.a. | 120 | 100.00 | 7.58 | 4.47 |
| node[2] | Merchant | 40 | 33.33 | 2.53 | 1.49 | |
| node[5] | Merchant | 40 | 33.33 | 2.53 | 1.49 | |
| node[8] | Merchant | 40 | 33.33 | 2.53 | 1.49 | |
| node[11] | Merchant | 0 | 0.00 | 0.00 | 0.00 | |
| LTE Network Overall | n.a. | n.a. | 332 | 100.00 | 100.00 | 12.37 |
| Ordering | n.a. | n.a. | 16 | 100.00 | 4.82 | 0.60 |
| node[1] | Lord | 4 | 25.00 | 1.20 | 0.15 | |
| node[4] | Lord | 4 | 25.00 | 1.20 | 0.15 | |
| node[7] | Lord | 4 | 25.00 | 1.20 | 0.15 | |
| node[10] | Lord | 4 | 25.00 | 1.20 | 0.15 | |
| Shipping | n.a. | n.a. | 84 | 100.00 | 25.30 | 3.13 |
| node[1] | Lord | 21 | 25.00 | 6.33 | 0.78 | |
| node[4] | Lord | 21 | 25.00 | 6.33 | 0.78 | |
| node[7] | Lord | 21 | 25.00 | 6.33 | 0.78 | |
| node[10] | Lord | 21 | 25.00 | 6.33 | 0.78 | |
| Ordering Response | n.a. | n.a. | 232 | 100.00 | 69.88 | 8.64 |
| node[12] | Server | 232 | 100.00 | 69.88 | 8.64 |
| Publication | Communication | Key Contribution | Open Questions |
|---|---|---|---|
| COMPANION—Towards Co-Operative Platoon Management of Heavy-Duty Vehicles [43]. Year: 2015. | Hybrid network: (i) Cellular—3G for communication with central server; (ii) IEEE 802.11p for intra-platoon communication with extended ITS-G5 messages. | Comprehensive system that includes: (i) Strategic layer (i.e., transport layer); (ii) Tactical layer (i.e., platoon layer); (iii) Operational layer (i.e., vehicle). | (i) Connection loss and system operability; (ii) No communication flow: broadcast/multicast or retransmission required; (iii) Surrounding traffic. |
| A Predictive Framework for Dynamic Heavy-Duty Vehicle Platoon Coordination [42]. Year: 2019. | Single network: (i) Cellular—communication with central server. | Platoon coordination system on strategic layer within four-layered control architecture for platooning: (i) Service—good flows matched to vehicles and drivers; (ii) Strategic—match making (i.e., transport layer); (iii) Tactical—platoon management and maneuvers (i.e., platoon layer); (iv) Operational—vehicle controller (i.e., vehicle layer). | (i) Tactical and operational layers; (ii) Connection loss: out of coverage and handover; (iii) Surrounding traffic. |
| 3GPP C-V2X and IEEE 802.11p for Vehicle-to-Vehicle communications in highway platooning scenarios [19]. Year: 2018. | Single network—one of the two networks: (i) C-V2X Mode-3 or Mode-4; (ii) IEEE 802.11p. | Vehicle Layer: (i) Investigate the suitability of IEEE 802.11p and C-V2X for platooning according to following performance metrics: inter-vehicle distance, message latency, and PRR; (ii) Results show that traffic density leads to congestion on the radio channel. Suitability for platooning in descending order—C-V2X Mode-3, C-V2X Mode-4, and IEEE 802.11p. | (i) Heterogeneous platoon; (ii) Cellular handover; (iii) No communication flow—broadcast/multicast or retransmission required; (iv) Time-varying traffic density. |
| Cloud-Assisted Distributed Control System Architecture for Platooning [44] Year: 2018 | Single network: (i) Cellular—5G. | Three-layered distributed functional architecture to control and manage platoons assisted by cloud computing platform: (i) Trip planner (cloud); (ii) Road section manager (edge); (iii) Coordination control (vehicle). | (i) Connection loss: out of coverage and handover. |
| Platooning on the edge [45] Year: 2020 | Single network: (i) Cellular—4G/5G. | Vehicle layer: (i) Predecessor-leader control of vehicle speed and acceleration is managed centralized according to the multi-access edge computing paradigm; (ii) Investigation of delay and packet loss in up- and downlink; (iii) Round trip message delays cannot be guaranteed below 150 ms—vehicle control must be performed on the vehicle. | (i) Other layers and their impact on the delay and packet loss; (ii) Connection loss: out of coverage and handover; (iii) Surrounding traffic; (iv) Varying data dependency. |
| Towards Edge Intelligence in the Automotive Scenario: A Discourse on Architecture for Database-Supported Autonomous Platooning [46] Year: 2022 | Single network: (i) Vehicular dynamic spectrum access. | Vehicle layer: (i) Dynamic selection of the operating frequency for intra-platoon communication with the aim to minimize overall interference; (ii) Selection is supported by infrastructure (centralized, distributed, and hybrid); (iii) Unoccupied TV channels of the TV band are used for data offloading. | (i) Other layers and their impact; (ii) Connection loss and operability. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Renzler, T.; Stolz, M.; Watzenig, D. Feudalistic Platooning: Subdivide Platoons, Unite Networks, and Conquer Efficiency and Reliability. Sensors 2022, 22, 4484. https://doi.org/10.3390/s22124484
Renzler T, Stolz M, Watzenig D. Feudalistic Platooning: Subdivide Platoons, Unite Networks, and Conquer Efficiency and Reliability. Sensors. 2022; 22(12):4484. https://doi.org/10.3390/s22124484
Chicago/Turabian StyleRenzler, Tobias, Michael Stolz, and Daniel Watzenig. 2022. "Feudalistic Platooning: Subdivide Platoons, Unite Networks, and Conquer Efficiency and Reliability" Sensors 22, no. 12: 4484. https://doi.org/10.3390/s22124484
APA StyleRenzler, T., Stolz, M., & Watzenig, D. (2022). Feudalistic Platooning: Subdivide Platoons, Unite Networks, and Conquer Efficiency and Reliability. Sensors, 22(12), 4484. https://doi.org/10.3390/s22124484