Abstract
Many modern user interfaces are based on touch, and such sensors are widely used in displays, Internet of Things (IoT) projects, and robotics. From lamps to touchscreens of smartphones, these user interfaces can be found in an array of applications. However, traditional touch sensors are bulky, complicated, inflexible, and difficult-to-wear devices made of stiff materials. The touch screen is gaining further importance with the trend of current IoT technology flexibly and comfortably used on the skin or clothing to affect different aspects of human life. This review presents an updated overview of the recent advances in this area. Exciting advances in various aspects of touch sensing are discussed, with particular focus on materials, manufacturing, enhancements, and applications of flexible wearable sensors. This review further elaborates on the theoretical principles of various types of touch sensors, including resistive, piezoelectric, and capacitive sensors. The traditional and novel hybrid materials and manufacturing technologies of flexible sensors are considered. This review highlights the multidisciplinary applications of flexible touch sensors, such as e-textiles, e-skins, e-control, and e-healthcare. Finally, the obstacles and prospects for future research that are critical to the broader development and adoption of the technology are surveyed.
1. Introduction: Development of Wearable Devices
During the past decade, advances in artificial intelligence (AI), sensors, and communication technologies have dramatically improved wearable sensors. The research and development of wearable sensing technology are accelerating the development of new applications in entertainment, fitness, and gaming, and specialized applications in certain fields, such as defense, healthcare, and security. Wearable devices had an estimated market value of USD 80 billion in 2020, representing a threefold increase since 2014; their market value is predicted to reach USD 138 billion by 2025 [1]. Smartwatches and wristbands had a combined market of 51% among the wearables used by consumers in 2019, and ear-worn wearable devices were expected to have a market share of 48% by 2021. In contrast, wristbands and smartwatches were expected to have a combined market share of 37%. The best-known wearables are ear-worn devices, with a market share of 48% in 2019, followed by smartwatches and wristbands with a combined share of 37% in 2020. Ear-worn devices will dominate the market with 48%, followed by smartwatches and wristbands with a combined share of 37% (Figure 1) [2].
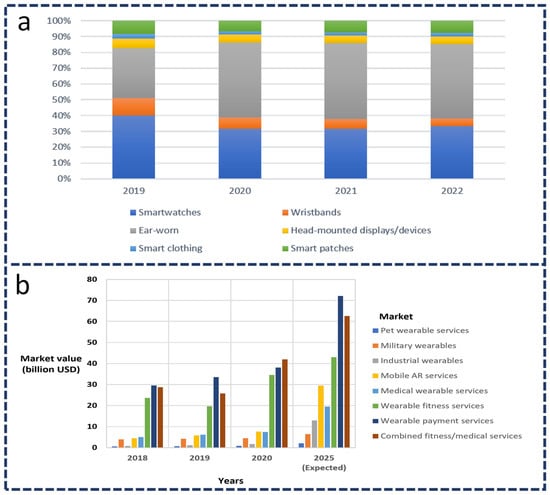
Figure 1.
(a) Global market share of wearables devices for consumers from 2019–2022; (b) wearable services market-value images. Reproduced from Ref. [2].
In the past few years, ear-worn wearables—in particular, true wireless stereo wearables—have exploded from a very small share to a large share of the wearable device market following the introduction of Apple AirPods in 2016; their popularity has also exponentially increased during the current coronavirus disease (COVID-19) pandemic [2] caused by severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2), because many people worldwide have been studying and working from their residences. The pandemic has led to an active interest in researching and developing reusable smart masks that can detect SARS-CoV-2 and self-sterilize [3,4]. In addition to the COVID-19 pandemic, other consumer wearable technologies have also been affected in fields, such as contact tracing, patient tracking, remote patient monitoring, and mobile payment systems [5,6]. The market for wearable sensing technologies was dominated by medical/fitness connected services in 2020. The wearable market is also booming in other segments, such as entertainment or gaming, industrial wearables, defense, and security (Table 1). Approximately USD 10 billion of market growth is expected by 2025 for the wearable payments services market (approximately USD 72 billion by 2025), compared with the combined fitness and medical wearables market [2]. Near-field communication (NFC) is one of the technologies that have expanded the wearable payments market. Financial payment standards are being supported in smartphones, and NFC will be incorporated into smartwatches, fitness bands, and other wearables in the near future [7].

Table 1.
Wearable technologies are classified according to their capabilities, properties, and application areas.
Wearables devices for human health have received intensive interest because they are an integral part of AI and the IoT, and commercial wearable devices that monitor human body signals, such as the Mi Band, Apple Watch, and many others, continue to be introduced [2]. Conventional sensors, which are usually made of rigid materials (metals or semiconductors), are rigid, inflexible, and difficult to wear. By contrast, flexible sensors have advantages over conventional rigid devices. These sensors are nontoxic and lightweight and can be worn comfortably on the body [8,9].
Researchers worldwide have recently begun to turn their attention to flexible touch sensors as a component of flexible wearable sensors. Several investigations involving using flexible sensors to monitor the health of patients [10,11] and detect human motion [12,13], as well as investigations in which flexible sensors were incorporated into electronic skins [14,15] have been reported.
This brief review highlights the latest advances in flexible sensors by emphasizing sensors integrated into garments or worn directly on the skin for diverse applications. Emphasis is placed on developments reported within the past few years, as described in Figure 2. Section 1 and Section 2 of this review introduce the basic principles of various touch sensors, including those based on resistive touch, capacitive touch, triboelectric touch, and piezoelectric touch. Section 3 discusses sensing materials, emphasizing some specific nanomaterials with numerous advantages. Section 4 discusses manufacturing technologies with critical methodologies currently being researched. Several practical approaches are discussed in Section 5. The topics covered in Section 5 are the most important for updating the research fields and uses for flexible touch sensors in everyday life. In view of these advances, Section 6 discusses the next steps in developing sensors both in the laboratory and in industrial manufacturing.
Figure 2.
Overview of flexible touch sensors.
2. Touch-Sensor Working Principles
There are three types of sensing actions: touch, movement, and pressure. The distance over which actions are performed differentiates fingertip touch and movement, and fingertip pressure level provides a third sensing action. Regular touch occurs when the finger is at a zero distance from the sensors and no force is applied. With increasing pressure, the amount of force increases (pressure sensing). Sensors that detect movement can use a combination of multiple sensing points or proximity sensors (the current distance exceeds zero). This review explores touch motions, where the separation between the finger and sensors is zero, and the pressure is less than 10 kPa. Table 2 summarizes several types of touch sensors that are compared on the basis of their materials, electrical or mechanical performance, working principles, and sensor thickness.
Table 2.
Summary of various sensors and sensing systems in terms of electrical and mechanical performance.
2.1. Single Mechanism
2.1.1. Capacitive Touch Sensors
Capacitive sensor technologies can be broadly divided into two main categories: mutual-capacitive and self-capacitive technologies [16]. For a self-capacitive system, capacitive changes are measured relative to earth ground. It operates on the basis of the parallel-layer model, where the electrode and bottom (or user’s finger) act as the two layers of the capacitor. As capacitance is added with each “touch”, the capacitance on the electrode of the self-capacitive system increases [26]. Contrarily, any intended or unintended capacitance between two “charge-holding objects” can be termed mutual capacitance [27]. A mutual capacitance between intersecting elements of columns and rows can be intentionally created via projected capacitance touch sensors. With the help of such system electronics, a single scan can detect multiple touches by measuring each node (intersection) individually. The surface capacitance measurement is used by some touch devices to determine the human body (finger). The sensor is contacted by a finger, forming a capacitor dynamically [28].
With robust and mechanically simple capacitive elements, such capacitive touch sensors can function over a wide range of pressures and temperatures. These capacitors are inherently low power, exhibit small hysteresis, and are suitable for wireless applications because of the lack of direct current (DC) flowing through the capacitor. However, in the vicinity of electronic devices, such sensors have disadvantages stemming from their nonlinearity and stray capacitance.
2.1.2. Resistive Touch Sensors
Resistive touch sensors respond to pressure [29]. These sensors are composed of several layers, with the most critical layer formed by two electrodes separated by another layer with poor conduction. Herein, a light pressure resulting from contact can predominantly change the resistance. Apart from a finger, other stimuli, such as a stylus, can also be sensed by these sensors. Resistive touch sensors were the earliest used sensors, with the advantages of low cost, fast response, a linear output, and high durability. However, such sensors require power, making them unsuitable for wearable systems (i.e., low-power systems) [12].
Piezoresistive materials, such as metals or semiconductors, can be used in these sensors. Upon application of mechanical stress, these materials exhibit a change in electrical resistance (i.e., a change in the distance among charged particles). The performance of such sensors can be dramatically improved by the implementation of geometric microstructure designs, such as pillars, pyramids, and hemispheres [19]. Because of the nonuniformity of the stress distribution, the pyramid structure is the most widely used microstructure. The tips of pyramid structures tend to exert more pressure than other structures because of their more significant mechanical deformation and sensitivity [30,31].
2.1.3. Piezoelectric and Triboelectric Touch Sensors
Piezoelectric materials translate deformation into electrical energy, enabling the development of a piezoelectric sensor [22]. Applying slight mechanical pressure (light touch) to a so-called piezoelectric material results in the separation of the electric charges because of electrical dipole moments, generating electrical voltage. When the external force is withdrawn, the polarization phenomenon disappears. By detecting the change of the electrical signal, it can be used to realize pressure sensing. Pressure sensing can be achieved by detecting the changing electrical signal. Some of the commonly used piezoelectric materials are BaTiO3, PZT, ZnO, PVDF, PbTiO3, and polypropylene (PP) [31]. Piezoelectric sensor performance may hinder as a result of cracking due to the pressure applied to traditional piezoelectric materials to overcome the problem of cracks and hole defects. Yang et al. synthesized a PDA@BTO/PVDF composite by introducing polydopamine (PDA) as a surface modification agent to barium titanate (BaTiO3, BTO), followed by their blending with a poly(vinylidene fluoride) (PVDF) matrix [32]. Piezoelectric sensors are commonly used for detecting various human body signals, including respiratory patterns, pulse signals, or recording finger movements [33], and to obtain heart rate signals [33].
2.1.4. Triboelectric Touch Sensors
Triboelectric sensors (or contact-electrification) is employed by a triboelectric nanogenerator (TENG) [21,34], where a physical contact (a touch) generates a potential electrical signal without reliance on an external power supply.
Triboelectric nanogenerators (TENGs) form the basis of triboelectric sensors. The inductive charges are generated on the friction layers of TENGs under external forces owing to the electron affinity differences. Upon the removal of the external force, current starts to flow between electrodes as a result of the formation of internal potential. Moreover, the current signals are analyzed for the sensing function. Sensors using electrostatic induction for the detection of human motions have been available since the introduction of triboelectric nanogenerators in 2012 [35]. The triboelectric nanogenerators may transform the received signals of body movements into electrical impulses, allowing the sensor to function without the need for external power. Commonly used as friction layer materials, they can easily lose or gain electrons, such as PTFE, PDMS, PI, nylon [36] copper, and silver. In triboelectric sensors for human health, a range of innovative functional materials has recently been used. Hydrogel, for example, is commonly used for the electrodes in triboelectric sensors capable of detecting arbitrary human body movements, such as deformation and stretch. Bionic structure sensors fabricated using ionic liquids can monitor underwater movements of the human body, as shown by Zou et al. Textile-based wearable sensors, in particular, are the emerging trend in sensing physiological signals [37].
E-textile and e-skin sensors make use of triboelectric and piezoelectric effects. Several studies have been reported to enhance the electric output via circuit design and material aspect, decrease the loss of power due to signal irregularity, or contact surface optimization. However, poor dynamic, stretchability, and low flexibility performance have restricted their practical applications. The sensor elements in such sensors are self-powered, robustness, and low power, which account for their main advantages. However, their significant disadvantages include the complexity and difficulty of integrating into a system.
The presence of several contacts simultaneously can be recognized by a surface using a technology known as multi-touch. This is mainly based on the sensor arrays and allows multiple finger gestures, such as swipe, zoom in/zoom out, scroll, and select. Resistive, capacitive, triboelectric, or optical principles can be used to fabricate these sensor arrays. However, capacitive or resistive sensor arrays have been demonstrated by several studies as the best suited for multi-touch surfaces [25,38,39].
3. Hybrid Multisensor Mechanisms
The multifunctional sensing hybrid mechanism is a crucial tool for enhancing the sensitivity of wearable devices. The hybrid mechanism involves integration mechanisms based on two or more principles. However, in this section, hybrid-principle mechanisms for different applications are discussed.
3.1. Two-Principle Integration Mechanism
A wearable sensor based on a single-principle mechanism is unable to detect multiple features and could not meet the requirements for multifunctional detection. Therefore, it is necessary to develop hybrid mechanisms to detect multiple properties and enable the fabrication of multifunctional sensors.
Two-principle mechanisms consist of various integrated mechanisms, such as triboelectric–piezoelectric mechanisms or capacitive–piezoelectric mechanisms. These two-principle mechanisms are used extensively in wearable devices. Tang et al. demonstrated a working mechanism based on simultaneous triboelectric and piezoelectric mechanisms in self-generated powered sensors [40]. Here, the two-principle mechanisms operate in different directions because the triboelectric components consist of four working electrodes that operate in the xy plane, whereas the piezoelectric element functions in the z plane. The mechanism’s structure is shown in Figure 3a. This integration has shown extensive applicability in the human–machine interaction and other wearable electronic devices [40].
Another component based on triboelectric and resistive integration mechanisms was investigated to detect gestures of prosthesis motion or robotic motion and of the human body [33]. Static and dynamic gestures are detected on the basis of differences in the activity of these integrative principles. In the case of static gestures, the response is measured in terms of the area of the conductive layer. The reduction in the area of the conductive layer leads to an increase in the resistance. By contrast, in the case of detecting dynamic motions, the triboelectric component functions as a nanogenerator to help sense different movements. Such devices could be used as a smart skin to perform and track other activities of human body parts. With the development of new materials, other authors have reported similar works in the field of wearable devices. Chen et al. [41] developed carbon nanotube-based poly-dimethylsiloxane (CNT-PDMS) and used it as a working electrode material in devices to track fingers. They used different types of CNT-PDMS (double-spiral and porous) as electrodes, and the substrates were fingerprints, epidermis, and dermis; thus, the CNT-PDMS could ultimately be used to create a whole set of e-skin sensors. As shown in Figure 3b, the mechanism is based on the change in voltage due to the triboelectrification effect, which is used to sense sliding motion. Additionally, pressure sensing is possible via a change in resistance [41].
Ma et al. [42] also reported using PDMS in conjunction with carbon black (CB)/thermoplastic polyurethane (TPU). Their hybrid device was a triboelectric–piezoresistive sensing unit that can easily sense and identify the mode of different boxing punches.
Park et al. [43] proposed using a combination of piezoelectric and resistive hybrid mechanisms for creating smart skin. The materials used were polyvinylidene difluoride (PVDF) and reduced graphene oxide (r-GO) microdome structures. The hybrid system of PVDF–rGO exhibited both piezoelectric and resistive properties, enabling it to easily perceive static and dynamic pressures and temperatures [43]. Extensive research on hybrid integration mechanisms involving capacitive and resistive modes has been reported in the literature. Chen et al. [44] used a Taiwan Semiconductor Manufacturing Company (TSMC) standard complementary metal-oxide semiconductor (CMOS) process to develop a tactile force sensor that consists of capacitive membranes and piezoresistive bridges that can sense force in the vertical direction and shear force, respectively. Park et al. [45] developed the first e-skin that can detect pressure, strain, bending, and lateral strain simultaneously. This developed material can also harvest energy using external stimuli, leading to self-powered devices and maximizing its applicability in different wearable and other devices. The architecture of the proposed sensor is shown in Figure 3c.
Moreover, the integrative aspects of capacitive and piezoresistive effects are also beneficial in creating a flexible sensor that can detect both touch and pressure, as reported by Hwang et al. [46]. Figure 3d shows a sandwich structure in which a change in capacitance induced by a change in the current would ultimately be beneficial in detecting external touch. By contrast, a change in the piezo resistance of the electrode induced by a decrease in the current would enable the detection of pressure. Because of these important properties, these materials can be extensively integrated into stretchable touch panels and other wearable devices [46].
Zhu et al. reported a thermoelectric and piezoelectric mechanism based on composites of organic and thermoelectric materials, such as PVDF and polyaniline, respectively [47]. These composites were used in flexible composite-based sensors that could simultaneously detect tactile motion and temperature independently of one another. These sensors exhibited vastly enhanced sensing of various motions. Because the piezoelectric materials also possess some pyroelectric properties, various authors have reported using multifunctional sensors that exhibit these properties. Chen et al. demonstrated a polymeric-substrate-based flexible sensor that can easily sense temperature and acoustic signals [48].
Thus, hybrid sensors with different sensing mechanisms provide excellent opportunities for miniaturization and multifunctionality. The further exploration of these aspects will be a focus of future research.
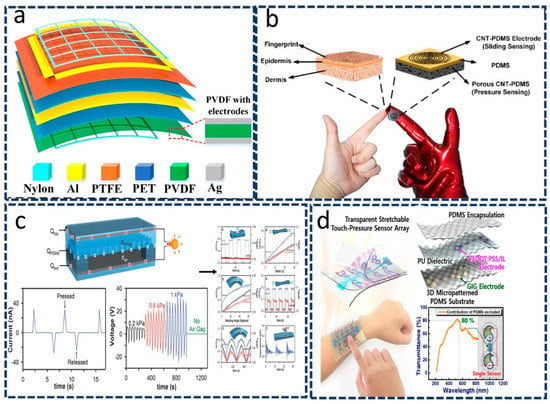
Figure 3.
Two−principle integrated wearable sensors. (a) An integrated triboelectric–piezoelectric self-powered sensor. Reproduced with permission from Elsevier (2021) [40]. (b) A comparison diagram of fingertip and e-skin. Reproduced with permission from Elsevier (2017) [41]. (c) The e-skin can not only sense strain, pressure, and bending, but also detect lateral strain. Reproduced with permission from Wiley (2014) [45]. (d) Through the capacitive and piezoresistive effects of the transparent flexible sensor, touch and pressure can be detected. Reproduced with permission from Springer Nature (2019) [46].
3.2. Three-Principle Integration
Hybridization involving three integration mechanisms will play a tremendous role in future wearable devices for use in wide applications, such as the human–machine interface, smart robots, and wearable electronics. To further improve the performance of sensing materials, it is important to introduce different mechanistic parameters into sensing mechanisms to expand their applicability in wearable and other devices. Various polymeric materials, such as PVDF, PDMS, PET, polyurethane (PU), polypropylene (PP), and other nanomaterials, are required to improve the cracking performance of materials subjected to great pressure or temperature changes, thereby requiring the integration of more than one mechanism for enhancing the sensing ability of the developed materials. Zhao et al. [49], for example, developed high-performance sensors by combining three effects: triboelectricity, piezoresistivity, and piezoelectricity. They fabricated a nanofilm of carbonized polyacrylonitrile/barium titanate (PAN-C/BTO) using the electrospinning method (Figure 4a). The resultant nanofilms could independently and simultaneously detect pressure and curvature with high and enhanced sensitivity. These sensors could be used multifariously in detecting human motion, such as finger tapping and swallowing. Kim et al. [50] reported using capacitive, resistive, and triboelectric effects to generate a self-powered sensor. Figure 4b clarifies that a change in capacitance can be used to enable the sensing of vertical force, whereas a change in resistance enables the measurement of lateral strain. As these changes occur, silver yarns inside the wall rub against each other, which generates energy. The three integrative mechanisms, along with the ability to self-generate power, will be extremely useful in developing portable and wearable devices [50].
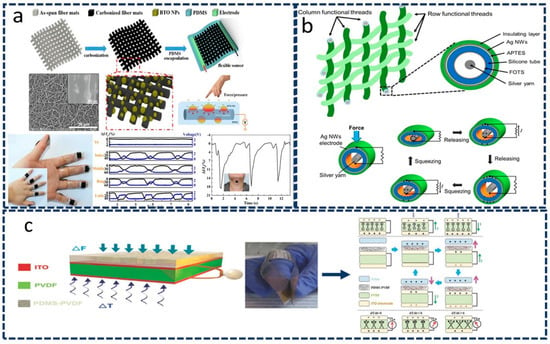
Figure 4.
Three-principle integrated wearable sensors. (a) Carbonized electrospun nanofiber films composed of polyacrylonitrile/barium titanate (PAN-C/BTO) have been developed for the fabrication of multifunctional sensors. Reproduced with permission from the American Chemical Society (2018) [49]. (b) A power-generation sensor was obtained by integrating triboelectric, capacitive, and resistive mechanisms. Reproduced from Ref. [50]. (c) A flexible multifunctional sensor combining piezoelectric, triboelectric, and pyroelectric effects. Reproduced with permission from Wiley (2016) [51].
Triple-principle mechanisms involving piezoelectric, triboelectric, and pyroelectric effects have been reported by Wang et al. [51]. These three mechanisms led to the development of a transparent triple hybrid nanogenerator. Figure 4c shows PVDF nanowires in a PDMS film used as a triboelectric layer, along with a piezoelectric and pyroelectric layer developed using polarized PVDF and indium tin oxide-based electrodes, respectively [51]. These generators produce various forms of energy that can be efficiently used to operate multifunctional wearable sensors [33]. In summary, the hybrid mechanism involving the core working structure of wearable devices plays an important role in imparting multifunctionality and in miniaturizing wearable devices, enabling the development of accurate and highly reliable sensors in wearable devices and other healthcare detection kits.
4. Nanocomposite Material for Flexible Touch Sensors
Flexible sensors should be made of a lightweight material that is biocompatible, comfortable, and does not cause irritation. Nanocomposite materials mostly include metallic thin films [52,53], carbon nanotubes (CNTs) [54,55], metal nanowires (NWs) [56], metal nanoparticles (NPs) [57], and conductive polymers [58,59]. Good electrochemical activity, high electrical conductivity, and a large active area make the NWs, CNTs, and conductive polymers preferred choices for sensors. In addition, NW/CNT composites can be coated/printed directly onto a substrate [60] to produce a sensor with high sensitivity, stretchability, and durability. Conductive polymers, such as poly(3,4-ethylene dioxythiophene) (PEDOT), and especially its complex with poly(styrene sulfonate) (PEDOT:PSS), can be synthesized by chemical or electrochemical deposition [61] and exhibit high conductivity, good transmission of light, good processability in water, and high flexibility. For the mass production of sensors, printable conductive materials are particularly advantageous because they enable nearly all sensor parts to be printed. Several metal conductive inks have been shown to be promising because of their tendency to disperse in solvents and their compatibility with different printing technologies. Ag nanoparticle-based inks and nanowires have been extensively studied as flexible electrodes or conductors for polyethylene (PE) [61]. However, Cu nanoparticle-based ink, which is inexpensive and highly conductive, has attracted particular attention [62]. Inks based on carbon nanomaterials (e.g., CNTs and graphene) have also been shown to be printable and stretchable for flexible sensors [63,64]. The integration of Ag nanowires (AgNWs) [65], ITO [66], graphene [67], PDMS [68], CNTs [68], and PEDOT:PSS [69] has led to transparent stretchable electrodes suitable for certain touch displays and photovoltaic applications. The fabrication of transparent electrodes/conductors faces a major challenge in the trade-off relationship among flexibility, transparency, and conductivity, which depends on the conductive filler concentration [70]. This challenge is particularly relevant to touch sensors such as touch screens and fingerprint sensors.
Liquid metals and liquid ionic materials are intrinsically flexible. Ionic additives can improve the conductivity and stretchability of PEDOT:PSS, leading to conductivity as high as 4100 S cm−1 at 100% strain, as demonstrated by Wang et al. [58], and enabling the fabrication of soft sensors that can detect both positive and negative pressures from −60 to 20 kPa [71]. Liquid metals—specifically, eutectic gallium–indium alloys—can be used to fabricate flexible circuits via the integration of room-temperature liquid metals (RTLMs) and water-soluble poly(vinyl alcohol) (PVA) because of their high conductivity, intrinsic stretchability, and low piezoresistivity. Thus, RTLMs and PVA can be integrated into flexible circuits [72], asymmetric force sensors can be prepared from hydrophilic polymer networks [73], and soft sensors can be produced by a 3D-printed rigid micro-bump [74,75]. In dynamic applications, liquid components introduce reliability problems. An excellent solution would be to embed the liquid metals into elastomers, such as PVA.
Furthermore, a polymer matrix combined with a wide range of nanofillers can produce various polymer nanocomposites. Nanofillers can have either two- or three-dimensional structures, similar to CNTs or graphene. The properties of CNTs, such as their high mechanical strength, high aspect ratio, and outstanding electrical properties, make them a particularly promising material. CNTs can be embedded in various polymer matrices to produce materials with diverse properties. Unfortunately, the high Van der Waals forces of CNTs cause the particles to tend to cluster or agglomerations. Thus, the distribution of CNTs in polymers strongly affects the performance of nanocomposites. There have been many efforts to achieve a homogeneously dispersed CNTs within the polymer matrix. This is required to fabrication sensors and establish the foundation for high repeatability. Numerous approaches have been developed to tailor and improve the dispersion of CNTs/polymer composites via solution mixing, including direct mixing, in situ polymerization and melt processing (Table 3). For example, a core-sheath fiber (CSF) for wearable strain sensors was developed by Tang et al. [76]. The fiber is formed by co-extrusion utilizing Ecoglex (a silicon elastomer) that contains 2 wt % MWCNT; the sheaths are made of neat Ecoflex. The sensor is highly stretchable, up to 600% stretching. They have exhibited different GFs at various stretching regions, from GF = −0.063 (about 25%) to GF = 1378 at 330% stretching. For higher concentration of CNTs (3%) the strain sensor displayed GF = −0.45 (110% strain) and reached GF = 153 (60% stretch). When the sensors were subjected to a quasi-transient step test (with strain up to 100%), overshooting occurred during accelerating and then a relaxation followed.
Table 3.
Stretchable and flexible polymer/CNTs matrices’ sensor performances.
5. Manufacturing Technologies
In current studies, spinning, coating, printing, and transferring are indispensable methods that strongly influence the electromechanical and flexible properties of touch sensors because they govern the material and the manufacturing process used.
Yarns or surfaces can be coated with conductive coatings. In this context, graphene nanoplatelets and carbon nanofibers painted along both sides of a rubber piece result in flexible and stretchable capacitive touch sensors with a low sheet resistance (~10 Ω sq−1). Chen et al. [8] developed a flexible touch sensor using electron-induced perpendicular graphene sheets implanted on porous carbon films (Figure 5a). These sheets displayed high sensitivity (0.13 kPa−1 at pressures less than 0.1 kPa and 4.41 MPa−1 at pressures greater than 10 kPa) as well as a fast response time of 66 ms when the substrate was ~0.5 mm Si.
Conductive printing techniques enable the fabrication of flexible touch sensors using printing technology. A transparent capacitive touch sensor fabricated using the inkjet printing technique has been proposed for use in freestanding nanoparticle arrays made of ultrafine polydopamine with a controlled line-to-line separation (similar to pitch), as illustrated in Figure 5b [86]. A self-powered touch sensor with a polyethylene terephthalate substrate with an area of 10 × 10 mm2 and a thickness of 380 µm was found to be capable of powering diodes, supplying power to a device, or charging a capacitor. It is a paper-based harvester screen-printed using a mesh [87]. Recently, researchers have focused extensively on 3D-printing technology because of its high commercialization potential, ease of integration, and large-scale manufacturing capability. Yin et al. [88] developed a new generation of wearable sensors based on polyacrylamide with hydratable salts and polyethylene glycol diacrylate. Their sensors exhibit high sensitivity (0.84 kPa−1) in the pressure range from 0.5 to 3 kPa. The electrospinning technique was used to make ultrasmall fibers using electric fields, which is an ideal method for producing soft transparent metal electrodes. For example, a flexible and transparent fingerprint sensor array prepared by electrospinning can detect skin temperature and tactile pressure (Figure 5c) [65]. The polyimide-based substrate used in this method was 25 µm thick. Kweon et al. [89] also demonstrated a polymer-based multifunctional pressure sensor that consisted of a hybrid nanostructure integrated with ultralong metal nanowires and fibers. Specifically, 3D electrospinning and vapor deposition polymerization methods have been used to fabricate conductive shells and core polymer nanofibers composed of poly(vinylidene fluoride-co-hexafluoropropylene) and poly(3,4-ethylene dioxythiophene) with a thickness of 1 mm. This sensor operates on the principle of resistive sensing, with a substantial sensitivity of ~13.5 kPa−1. In addition, flexible sensors can be fabricated by transferring a conductive material onto textile or silicone. Although this technology is not practical, it serves as a step that can be used to support other technologies [1]. Evaporation is another an important step in the synthesis of thin films of materials used in various flexible devices. The evaporation process typically involves two fundamental processes: evaporation of a heated source material and condensation onto a substrate (Figure 5d). As one example, Vieira et al. [90] proposed a highly heat-sensitive thermoelectric thin-film sensor based on p-type SnOx. They deposited a thermo-oxidation film with a thickness of 60–160 nm at a rate of 2 Å s−1 and a pressure of 2 × 10−5 mbar under an air atmosphere for 3 h at 250 °C. The resultant SnOx thin films (60 nm) functioned as a touch sensor with high sensitivity (Vsignal = Vnoise ≈ 20) and a rise time shorter than 1 s.
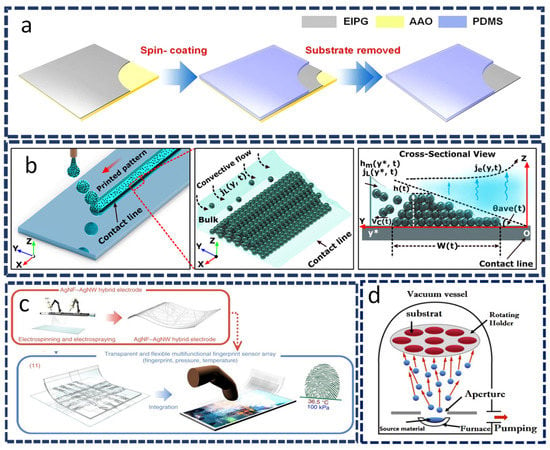
Figure 5.
Schematics: (a) The flexible electrode is deposited using spin coating with electron-induced perpendicular graphene. Reproduced with permission from Springer Nature (2020) [8]. (b) The inkjet-printing controllable process for evaporation-driven convective particle self-assembly at the contact line. Reproduced with permission from Wiley-VCH. (2020) [86]. (c) The electrospinning and electrospraying processes of a silver nanofiber (AgNF)–silver nanowire (AgNW) hybrid electrode. Reproduced with permission from Springer Nature (2018) [65]. (d) Thermal evaporation coating. Reproduced from Ref. [91].
6. Applications of the Touch Types
In a new era, significant advances in the creation of flexible materials for mechanically stretchy and bending sensors will widen the applications of “touch’s definition”. The conductive elements have mechanical and morphological properties that affect not only its intrinsic electrical properties, but also their efficiency and range of applications. Research and advances in sensors have been made over the past few years in the development of e-textiles, e-skins, e-control applications, and e-healthcare. During the last few years, researchers and scientists have made significant advances in developing flexible sensors for e-textiles, e-skins, e-control, and e-healthcare applications.
6.1. E-Skins-Based Approach
An electronic skin is an electronic device that mimics human skin properties by being flexible, stretchable, and self-healing. E-skins have multiple applications, including prosthetics, robotics, and skin-attachable devices. E-skins made of ultrathin materials, such as PET or poly(ethylene naphthalate), are a good choice for a small, sustainable deformations. In addition, elastomer substrates, such as polyurethane (PU), latex, and poly(polydimethylsiloxane) (PDMS) may be used in applications that require stretchability [92]. Asghar et al. [93] used magnetically generated microstructures (MPs/PDMSs) to show a piezo-capacitive flexible pressure sensor. In the device, pressure can be sensed over a wide range (0 to 145 kPa) with a fast response (50 ms), as well as high cyclic stability (>9000 cycles). In addition, Park et al. [94] developed a 3D fingertip-shaped artificial skin device with capacitive sensing technology that provides a large amount of electrical signal contact when touched (Figure 6a). It has the ability to detect the precise place of a touch and repair mechanical harm on its own. A combination of ionconductive hydrogel and 3D printing (nozzle size of 0.6 mm) shows an excellent result for touch devices. Naturally, plant materials can also be used as dielectric materials for flexible capacitive e-skins as they are simply composed of dried flower petals or leaves (Figure 6b) [95]. Based on natural-material e-skin (thickness ~207 m), the device was able to operate in a wide range of pressure from 0.6 Pa–115 kPa with a greater sensitivity (1.54 kPa−1) and superior strength for over 5000 cycles of pressing or bending. This is a novel strategy for achieving a cost-effective, green and scalable solution.
We also developed a simple method to manufacture e-skins with high efficiency by employing ultrasonic spraying. These e-skins are bioinspired in appearance, consisting of microhexagonal columnar arrays that are tightly interlocked. In our studies, we found that our e-skins with microhexagonal columnar structures were capable of detecting pressure, shear, and bending, as well as static mechanical stimuli. We use piezoresistivity to construct our devices due to surface-to-surface contact between hexagonal structures. SWCNTs were shown to be capable of detecting extremely very small stimuli, as we demonstrated that tightly interlocked hexagonal structures allow direct contact with external stimuli. For example, internal and external minute vibrations as well as tiny water droplets (10 μL) sprinkled on the surface can be detected [96].
6.2. E-Textiles-Based Approach
As one of many wearable sensors, e-textiles in stretchy fabrics have drawn attention from both the academic and industrial worlds because of their supreme wearability in allowing seamless fitting across different body sizes and shapes [97]. Traditionally, e-textiles have been created by knitting, weaving, or embroidering functional fibers into fabrics in a twisted or coaxial structure, or embedding functional nanoparticles directly into fabrics. Through adding electronic elements, e-textiles, such as conductive fibers or fabrics, can be used in wearable devices, the human–machine interface, or for controlling/monitoring applications [98].
With the addition of an electronic unit, e-textiles, such as conductive nanofibers or nanofabrics, can be used in wearable devices, data collection, control, and for monitoring applications. A temperature sensor e-textile made up of rGO flakes that have been applied to a bleached cotton yarn used batch dyeing in a high-throughput manner (1000 kg/h) [99]. In addition to the overcoat, cotton yarns were knitted into scaffold shapes via an automatic knitting machine to ensure high mechanical stability against a cyclic analysis at 25–55 °C. The great sensitivity and rapid response time of carbon-based nanomaterials, such as CNTs, have also made them an attractive alternative to rGO flakes for temperature sensors [100]. For example, Hasanpour et al. coated cotton threads with fluorinated ethylene propylene (FEP) and CNTs multiple times following dip-coating processes and drying procedures to protect the temperature sensor from the effects of humidity [101]. A conventional stitching machine was used to stitch threads into polyester fabrics, which conducted cyclic testing without exhibiting significant hysteresis between 50 to 120 °C without the threads unravelling. For even higher sensitivity, Wu et al. developed a hybrid silk fiber structure by mixing CNTs in a 1-ethyl-3-methylimidazolium bis (tri fluoromethyl sulfonyl) imide ionic liquid, which provided additional charge transport paths to enhance sensitivity up to the current highest level of 23.3 kW °C−1 [102]. Combining CNT networks with the fast-ionic mobility of an ionic liquid enabled the hybrid structure to improve sensitivity by exploiting the percolation theory of the hybrid structure.
A number of e-textiles have the benefit of being very stretchable, bendable, and washable while maintaining excellent electrical conductivity. In Figure 6c, omniphobic triboelectric nanogenerators (RF-TENGs) embedded into an e-textile provide high performance under deformation, washing, and touch as well as low production costs [103]. E-textiles provide a tremendous benefit of comfort for users due to artificial and natural fibers/fabrics, such as silk, cotton, or polyacrylates, which are common materials in everyday life.
6.3. E-Healthcare-Based Approach
For healthcare implementation devices must be low energy consumers and biocompatible to prevent skin irritation. In e-healthcare, wearable bio-chemical/chemical sensors are featured as examples of a flexible touch-sensing. Their greatest issue is maintaining precision in a variable working environment with multiple impacts, such as temperature and humidity [104]. Normally, these biochemical or chemical sensors are often connected to human skin or are woven into garments and fabrics in order to detect external toxins or monitor the level of specific (blood) compounds 7/7 [105]. A near-infrared photoplethysmogram (NIR-PPG) hybrid sensor was proposed for cardiovascular monitoring by Xu et al. [106]. The NIR-PPG is made up of an organic-phototransistor (OPT) with great sensibility and an inorganic light-emitting diode with excellent efficiency. A continuous heart rate variability (real time) can be measured by this sensor using low power (1.2 × 10−15 W Hz−1/2). Because of the thin-encapsulation structure, the device is highly flexible and can be transferred directly to the finger (Figure 6d). Similarly, the temperature of the tissue at the site of the wound can also be sensed by using a breathable electronic device [107]. A nanomeshed thermoresponsive polymer film with a conductive network is crosslinked by electrospun moxifloxacin-hydrochloride loaded on the device shown in a Figure 6e. Touch-area dimensions are 3 × 3.5 cm2 and thickness (~500 μm). In addition, when a wound becomes infected, this nanomesh layer can operate as a very effective heater, which stimulates the release of antibiotics and inhibits bacterial colonization.
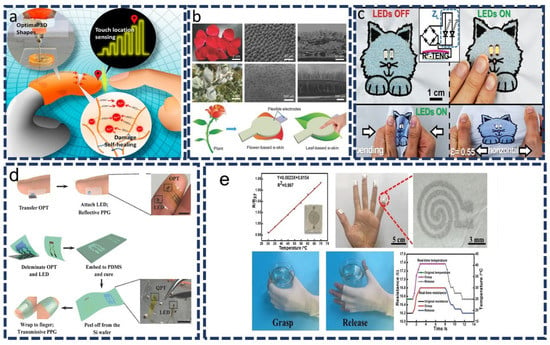
Figure 6.
(a) 3D-printed fingertip-shaped artificial skin device that senses precise touch location and automatically heals mechanical damage. Reproduced with permission from ACS (2020) [94]. (b) An illustration of an e-skin, which consists of two electrodes with a layer of dielectric material (flower and leaf) between them. Reproduced with permission from Wiley-VCH (2018) [95]. (c) Triboelectric nanogenerators (RF-TENGs) fabricated from e-textiles shaped similar to cats that power two LEDs embroidered on the body (when touched). Reproduced with permission from Wiley-VCH (2019) [103]. (d) It is comprised of an OPT and an LED that are laminated directly onto the finger to form a PPG sensor for the purposes of cardiovascular monitoring. Reproduced with permission from Wiley-VCH (2017) [106]. (e) A finger is attached to the nanomesh film devices for tissue temperature sensing. Reproduced with permission from Wiley-VCH (2019) [107].
7. Summary and Outlook
We presented an update on the latest research in the field of flexible wearable sensors with an emphasis on touch-sensing. As discussed, the capabilities and concepts of the technology for touch sensors have expanded with the development of new materials. The areas of e-skins, e-textiles, e-healthcare, and e-control are key fields with considerable potential.
Future works and commercialization efforts face numerous hurdles. Three critical issues are materials, technology, and the working environment. For instance, metal nanomaterials that are extensively being used in sensor design show relatively poor long-term stability, can be easily oxidized or desulfurized, and are genotoxic. However, CNTs and graphene can have immunological effects, cause lung inflammation, interstitial fibrosis, or asthma, and are possible carcinogens [108]. The encapsulation of sensors is a potential solution; however, sensor performance is affected by encapsulation. The encapsulation (by silicone or PDMS) increases the thickness, resulting in a decrease in flexibility and an increase in the touch pressure required to induce a change inside the sensors. In addition, integrating flexible sensors and electronic devices or systems is difficult because a power supply is required to support a fully functional sensing system. Efforts are underway to enhance the integration capability and flexibility of sensors in such systems. The signal-processing circuit poses another hurdle because the encapsulation approach can result in undesired noise or hotspots when the sensor is in contact with human skin [109]. Moreover, a false trigger can be caused by the presence of uncontrolled working environments, such as vapor, noise, and oils/sweat from the human body. Touch-sensing requires an optimization of the techniques used to collect or analyze data, such as distinguishable intended and false touches. The aforementioned problems necessitate multidisciplinary research to develop solutions, with the goal of designing a complete touch-sensing system and bringing items from the laboratory to the industry.
Author Contributions
Conceptualization, A.H.A., S.M.N. and C.J.; validation, S.M.N. and H.Y.; investigation, A.H.A. and C.J.; writing—original draft preparation, A.H.A. and C.J.; writing—review and editing, N.K., M.Z.A., S.-S.B., S.K., S.M.N. and C.J.; supervision, S.M.N. and C.J.; funding acquisition, S.M.N. and C.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT and Future Planning (2021R1C1C1008421). This work was also supported by the 2021 Yeungnam University Research Grant (221A580042) and the Ministry of Trade, Industry & Energy of Korea (Industrial Technology Innovation Program Nos. 20010256 and 20017536), and the Korea Research Institute of Chemical Technology (KRICT) Research and Development (R&D, SS2241-10) program.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
All data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Vu, C.C.; Kim, S.J.; Kim, J. Flexible wearable sensors—An update in view of touch-sensing. Sci. Technol. Adv. Mater. 2021, 22, 26–36. [Google Scholar] [CrossRef] [PubMed]
- Perez, A.J.; Zeadally, S. Recent advances in wearable sensing technologies. Sensors 2021, 21, 6828. [Google Scholar] [CrossRef] [PubMed]
- De Sio, L.; Ding, B.; Focsan, M.; Kogermann, K.; Pascoal-Faria, P.; Petronela, F.; Mitchell, G.; Zussman, E.; Pierini, F. Personalized Reusable Face Masks with Smart Nano-Assisted Destruction of Pathogens for COVID-19: A Visionary Road. Chem.-Eur. J. 2021, 27, 6112–6130. [Google Scholar] [CrossRef]
- Nguyen, P.Q.; Soenksen, L.R.; Donghia, N.M.; Angenent-Mari, N.M.; de Puig, H.; Huang, A.; Lee, R.; Slomovic, S.; Galbersanini, T.; Lansberry, G.; et al. Wearable materials with embedded synthetic biology sensors for biomolecule detection. Nat. Biotechnol. 2021, 39, 1366–1374. [Google Scholar] [CrossRef]
- Ahmed, N.; Michelin, R.A.; Xue, W.; Ruj, S.; Malaney, R.; Kanhere, S.S.; Seneviratne, A.; Hu, W.; Janicke, H.; Jha, S.K. A Survey of COVID-19 Contact Tracing Apps. IEEE Access 2020, 8, 134577–134601. [Google Scholar] [CrossRef]
- Wright, J.H.; Caudill, R. Remote treatment delivery in response to the COVID-19 Pandemic. Psychother. Psychosom. 2020, 89, 130–132. [Google Scholar] [CrossRef]
- Téllez, J.; Zeadally, S. Mobile Payment Systems: Secure Network Architectures and Protocols; Springer: Berlin/Heidelberg, Germany, 2017; ISBN 9783319230320. [Google Scholar]
- Chen, S.; Wang, Y.; Yang, L.; Karouta, F.; Sun, K. Electron-Induced Perpendicular Graphene Sheets Embedded Porous Carbon Film for Flexible Touch Sensors. Nano-Micro Lett. 2020, 12, 136. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, J.; Jang, B.; Kim, S.; Sharma, B.K.; Kim, J.H.; Ahn, J.H. Graphene-based stretchable/wearable self-powered touch sensor. Nano Energy 2019, 62, 259–267. [Google Scholar] [CrossRef]
- Yin, F.; Lu, H.; Pan, H.; Ji, H.; Pei, S.; Liu, H.; Huang, J.; Gu, J.; Li, M.; Wei, J. Highly Sensitive and Transparent Strain Sensors with an Ordered Array Structure of AgNWs for Wearable Motion and Health Monitoring. Sci. Rep. 2019, 9, 2403. [Google Scholar] [CrossRef] [Green Version]
- Huynh, T.P.; Haick, H. Autonomous Flexible Sensors for Health Monitoring. Adv. Mater. 2018, 30, e1802337. [Google Scholar] [CrossRef]
- Chang, H.; Kim, S.; Jin, S.; Lee, S.W.; Yang, G.T.; Lee, K.Y.; Yi, H. Ultrasensitive and Highly Stable Resistive Pressure Sensors with Biomaterial-Incorporated Interfacial Layers for Wearable Health-Monitoring and Human-Machine Interfaces. ACS Appl. Mater. Interfaces 2018, 10, 1067–1076. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Guo, Z.; Zhong, M.; Wan, P.; Zhang, W.; Zhang, L. A Flexible Wearable Pressure Sensor with Bioinspired Microcrack and Interlocking for Full-Range Human–Machine Interfacing. Small 2018, 14, e1803018. [Google Scholar] [CrossRef] [PubMed]
- Xiong, J.; Cui, P.; Chen, X.; Wang, J.; Parida, K.; Lin, M.F.; Lee, P.S. Skin-touch-actuated textile-based triboelectric nanogenerator with black phosphorus for durable biomechanical energy harvesting. Nat. Commun. 2018, 9, 4280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, G.; Ruan, Z.; Liu, Z.; Li, H.; Wang, Z.; Tang, Z.; Mo, F.; Yang, Q.; Ma, L.; Wang, D.; et al. Toward Multifunctional and Wearable Smart Skins with Energy-Harvesting, Touch-Sensing, and Exteroception-Visualizing Capabilities by an All-Polymer Design. Adv. Electron. Mater. 2019, 5, 1900553. [Google Scholar] [CrossRef]
- Park, B.J.; Oh, S.; Kim, F.S.; Chang, S.T. Pixel-free capacitive touch sensor using a single-layer ion gel. J. Mater. Chem. C 2019, 7, 10264–10272. [Google Scholar] [CrossRef]
- Chen, S.; Song, Y.; Xu, F. Flexible and Highly Sensitive Resistive Pressure Sensor Based on Carbonized Crepe Paper with Corrugated Structure. ACS Appl. Mater. Interfaces 2018, 10, 34646–34654. [Google Scholar] [CrossRef] [PubMed]
- Peng, S.; Blanloeuil, P.; Wu, S.; Wang, C.H. Rational Design of Ultrasensitive Pressure Sensors by Tailoring Microscopic Features. Adv. Mater. Interfaces 2018, 5, 1800403. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Liu, J.; Jiang, H.; Li, C. Flexible hemispheric microarrays of highly pressure-sensitive sensors based on breath figure method. Nanoscale 2018, 10, 10691–10698. [Google Scholar] [CrossRef]
- Li, H.; Wu, K.; Xu, Z.; Wang, Z.; Meng, Y.; Li, L. Ultrahigh-Sensitivity Piezoresistive Pressure Sensors for Detection of Tiny Pressure. ACS Appl. Mater. Interfaces 2018, 10, 20826–20834. [Google Scholar] [CrossRef]
- Gogurla, N.; Roy, B.; Park, J.Y.; Kim, S. Skin-contact actuated single-electrode protein triboelectric nanogenerator and strain sensor for biomechanical energy harvesting and motion sensing. Nano Energy 2019, 62, 674–681. [Google Scholar] [CrossRef]
- Gao, X.; Zheng, M.; Yan, X.; Fu, J.; Zhu, M.; Hou, Y. The alignment of BCZT particles in PDMS boosts the sensitivity and cycling reliability of a flexible piezoelectric touch sensor. J. Mater. Chem. C 2019, 7, 961–967. [Google Scholar] [CrossRef]
- Liu, M.; Pu, X.; Jiang, C.; Liu, T.; Huang, X.; Chen, L.; Du, C.; Sun, J.; Hu, W.; Wang, Z.L. Large-Area All-Textile Pressure Sensors for Monitoring Human Motion and Physiological Signals. Adv. Mater. 2017, 29, 1703700. [Google Scholar] [CrossRef] [PubMed]
- Yogeswaran, N.; Navaraj, W.T.; Gupta, S.; Liu, F.; Vinciguerra, V.; Lorenzelli, L.; Dahiya, R. Piezoelectric graphene field effect transistor pressure sensors for tactile sensing. Appl. Phys. Lett. 2018, 113, 014102. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.; Kim, G.; Kim, Y.; Kang, S.; Cho, S.; Kim, S.G.; Kim, J.K.; Lee, W.; Kim, D.E.; et al. Rough-Surface-Enabled Capacitive Pressure Sensors with 3D Touch Capability. Small 2017, 13, 38–44. [Google Scholar] [CrossRef] [PubMed]
- Jeon, G.J.; Lee, S.H.; Lee, S.H.; Shim, J.B.; Ra, J.H.; Park, K.W.; Yeom, H.I.; Nam, Y.; Kwon, O.K.; Park, S.H.K. Highly Sensitive Active-Matrix Driven Self-Capacitive Fingerprint Sensor based on Oxide Thin Film Transistor. Sci. Rep. 2019, 9, 3216. [Google Scholar] [CrossRef] [Green Version]
- Heo, S.; Park, K.; Choi, E.H.; Bien, F. Differential Coded Multiple Signaling Method with Fully Differential Receiver for Mutual Capacitive Fingerprint TSP. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 74–85. [Google Scholar] [CrossRef]
- Kweon, O.Y.; Samanta, S.K.; Won, Y.; Yoo, J.H.; Oh, J.H. Stretchable and Self-Healable Conductive Hydrogels for Wearable Multimodal Touch Sensors with Thermoresponsive Behavior. ACS Appl. Mater. Interfaces 2019, 11, 26134–26143. [Google Scholar] [CrossRef]
- Chen, W.; Yan, X. Progress in achieving high-performance piezoresistive and capacitive flexible pressure sensors: A review. J. Mater. Sci. Technol. 2020, 43, 175–188. [Google Scholar] [CrossRef]
- Fan, F.R.; Lin, L.; Zhu, G.; Wu, W.; Zhang, R.; Wang, Z.L. Transparent triboelectric nanogenerators and self-powered pressure sensors based on micropatterned plastic films. Nano Lett. 2012, 12, 3109–3114. [Google Scholar] [CrossRef] [Green Version]
- Xin, Y.; Liu, T.; Sun, H.; Xu, Y.; Zhu, J.; Qian, C.; Lin, T. Recent progress on the wearable devices based on piezoelectric sensors. Ferroelectrics 2018, 531, 102–113. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, H.; Xie, G.; Jiang, Y.; Chen, C.; Su, Y.; Wang, Y.; Tai, H. Flexible piezoelectric pressure sensor based on polydopamine-modified BaTiO3/PVDF composite film for human motion monitoring. Sensors Actuators, A Phys. 2020, 301, 111789. [Google Scholar] [CrossRef]
- Zeng, X.; Deng, H.T.; Wen, D.L.; Li, Y.Y.; Xu, L.; Zhang, X.S. Wearable Multi-Functional Sensing Technology for Healthcare Smart Detection. Micromachines 2022, 13, 254. [Google Scholar] [CrossRef] [PubMed]
- Jeong, C.; Lee, S.; Roh, H.D.; Feng, M.Q.; Park, Y. Bin Hierarchically structured ZnO nanorod-carbon fiber composites as ultrathin, flexible, highly sensitive triboelectric sensors. Smart Mater. Struct. 2020, 29, 025002. [Google Scholar] [CrossRef]
- Wang, Z.L.; Wu, W. Nanotechnology-enabled energy harvesting for self-powered micro-/nanosystems. Angew. Chemie-Int. Ed. 2012, 51, 11700–11721. [Google Scholar] [CrossRef]
- Qian, J.; He, J.; Qian, S.; Zhang, J.; Niu, X.; Fan, X.; Wang, C.; Hou, X.; Mu, J.; Geng, W.; et al. A Nonmetallic Stretchable Nylon-Modified High Performance Triboelectric Nanogenerator for Energy Harvesting. Adv. Funct. Mater. 2020, 30, 1907414. [Google Scholar] [CrossRef]
- Zou, Y.; Tan, P.; Shi, B.; Ouyang, H.; Jiang, D.; Liu, Z.; Li, H.; Yu, M.; Wang, C.; Qu, X.; et al. A bionic stretchable nanogenerator for underwater sensing and energy harvesting. Nat. Commun. 2019, 10, 2695. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Guo, X.; Meng, D.; Cho, M.; Park, I.; Huang, R.; Song, W. A flexible comb electrode triboelectric-electret nanogenerator with separated microfibers for a self-powered position, motion direction and acceleration tracking sensor. J. Mater. Chem. A 2018, 6, 16548–16555. [Google Scholar] [CrossRef]
- Jeong, H.; Park, S.; Lee, J.; Won, P.; Ko, S.H.; Lee, D. Fabrication of Transparent Conductive Film with Flexible Silver Nanowires Using Roll-to-Roll Slot-Die Coating and Calendering and Its Application to Resistive Touch Panel. Adv. Electron. Mater. 2018, 4, 1800243. [Google Scholar] [CrossRef]
- Tang, G.; Shi, Q.; Zhang, Z.; He, T.; Sun, Z.; Lee, C. Hybridized wearable patch as a multi-parameter and multi-functional human-machine interface. Nano Energy 2021, 81, 105582. [Google Scholar] [CrossRef]
- Chen, H.; Miao, L.; Su, Z.; Song, Y.; Han, M.; Chen, X.; Cheng, X.; Chen, D.; Zhang, H. Fingertip-inspired electronic skin based on triboelectric sliding sensing and porous piezoresistive pressure detection. Nano Energy 2017, 40, 65–72. [Google Scholar] [CrossRef]
- Ma, Z.; Meng, B.; Wang, Z.; Yuan, C.; Liu, Z.; Zhang, W.; Peng, Z. A triboelectric-piezoresistive hybrid sensor for precisely distinguishing transient processes in mechanical stimuli. Nano Energy 2020, 78, 105216. [Google Scholar] [CrossRef]
- Park, J.; Kim, M.; Lee, Y.; Lee, H.S.; Ko, H. Nanomaterials: Fingertip skin-inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, e1500661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.L.; Huang, Y.C.; Hsieh, M.L.; Yeh, S.K.; Fang, W. A Novel CMOS-MEMS Tri-Axial Tactile Force Sensor Using Capacitive and Piezoresistive Sensing Mechanisms. In Proceedings of the 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), Online, Orlando, Florida, USA, 20–25 June 2021; pp. 210–213. [Google Scholar]
- Park, S.; Kim, H.; Vosgueritchian, M.; Cheon, S.; Kim, H.; Koo, J.H.; Kim, T.R.; Lee, S.; Schwartz, G.; Chang, H.; et al. Stretchable energy-harvesting tactile electronic skin capable of differentiating multiple mechanical stimuli modes. Adv. Mater. 2014, 26, 7324–7332. [Google Scholar] [CrossRef] [PubMed]
- Hwang, B.U.; Zabeeb, A.; Trung, T.Q.; Wen, L.; Lee, J.D.; Choi, Y.I.; Lee, H.B.; Kim, J.H.; Han, J.G.; Lee, N.E. A transparent stretchable sensor for distinguishable detection of touch and pressure by capacitive and piezoresistive signal transduction. NPG Asia Mater. 2019, 11, 23. [Google Scholar] [CrossRef] [Green Version]
- Zhu, P.; Wang, Y.; Sheng, M.; Wang, Y.; Yu, Y.; Deng, Y. A flexible active dual-parameter sensor for sensitive temperature and physiological signal monitoring: Via integrating thermoelectric and piezoelectric conversion. J. Mater. Chem. A 2019, 7, 8258–8267. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Y.; Yuan, F.; Ding, F.; Schmidt, O.G. A Flexible PMN-PT Ribbon-Based Piezoelectric-Pyroelectric Hybrid Generator for Human-Activity Energy Harvesting and Monitoring. Adv. Electron. Mater. 2017, 3, 1600540. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Zhang, X.; Cui, X.; Wang, S.; Liu, Z.; Deng, L.; Qi, A.; Qiao, X.; Li, L.; Pan, C.; et al. Piezoelectric Polyacrylonitrile Nanofiber Film-Based Dual-Function Self-Powered Flexible Sensor. ACS Appl. Mater. Interfaces 2018, 10, 15855–15863. [Google Scholar] [CrossRef]
- Kim, K.; Song, G.; Park, C.; Yun, K.S. Multifunctional woven structure operating as triboelectric energy harvester, capacitive tactile sensor array, and piezoresistive strain sensor array. Sensors 2017, 17, 2582. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Z.L.; Yang, Y. A One-Structure-Based Hybridized Nanogenerator for Scavenging Mechanical and Thermal Energies by Triboelectric-Piezoelectric-Pyroelectric Effects. Adv. Mater. 2016, 28, 2881–2887. [Google Scholar] [CrossRef]
- Ansari, M.Z.; Janicek, P.; Nandi, D.K.; Slang, S.; Bouska, M.; Oh, H.; Shong, B.; Kim, S.H. Low-temperature growth of crystalline Tin(II) monosulfide thin films by atomic layer deposition using a liquid divalent tin precursor. Appl. Surf. Sci. 2021, 565, 150152. [Google Scholar] [CrossRef]
- Kim, K.J.; Lu, P.; Culp, J.T.; Ohodnicki, P.R. Metal-Organic Framework Thin Film Coated Optical Fiber Sensors: A Novel Waveguide-Based Chemical Sensing Platform. ACS Sensors 2018, 3, 386–394. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Wang, X.; Xiang, H.; Zhu, L.; Tebyetekerwa, M.; Zhu, M. Superior piezoresistive strain sensing behaviors of carbon nanotubes in one-dimensional polymer fiber structure. Carbon N. Y. 2018, 140, 1–9. [Google Scholar] [CrossRef]
- Jeong, C.; Park, Y. Bin Exfoliated Graphite Nanoplatelet-Carbon Nanotube Hybrid Composites for Compression Sensing. ACS Omega 2020, 5, 2630–2639. [Google Scholar] [CrossRef] [PubMed]
- Duan, S.; Wang, Z.; Zhang, L.; Liu, J.; Li, C. A Highly Stretchable, Sensitive, and Transparent Strain Sensor Based on Binary Hybrid Network Consisting of Hierarchical Multiscale Metal Nanowires. Adv. Mater. Technol. 2018, 3, 1800020. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, Y.; Cui, L.; Zheng, F.; Song, Q. Electroactive Au@Ag nanoparticles driven electrochemical sensor for endogenous H2S detection. Biosens. Bioelectron. 2018, 117, 53–59. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, C.; Pfattner, R.; Yan, H.; Jin, L.; Chen, S.; Molina-Lopez, F.; Lissel, F.; Liu, J.; Rabiah, N.I.; et al. A highly stretchable, transparent, and conductive polymer. Sci. Adv. 2017, 3, e1602076. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Ding, Y.; Guo, X.; Yu, G. Conductive polymers for stretchable supercapacitors. Nano Res. 2019, 12, 1978–1987. [Google Scholar] [CrossRef]
- Min, S.H.; Lee, G.Y.; Ahn, S.H. Direct printing of highly sensitive, stretchable, and durable strain sensor based on silver nanoparticles/multi-walled carbon nanotubes composites. Compos. Part B Eng. 2019, 161, 395–401. [Google Scholar] [CrossRef]
- Chu, T.Y.; Zhang, Z.; Tao, Y. Printing Silver Conductive Inks with High Resolution and High Aspect Ratio. Adv. Mater. Technol. 2018, 3, 1700321. [Google Scholar] [CrossRef]
- Zhong, Z.; Lee, H.; Kang, D.; Kwon, S.; Choi, Y.M.; Kim, I.; Kim, K.Y.; Lee, Y.; Woo, K.; Moon, J. Continuous Patterning of Copper Nanowire-Based Transparent Conducting Electrodes for Use in Flexible Electronic Applications. ACS Nano 2016, 10, 7847–7854. [Google Scholar] [CrossRef]
- Liang, X.; Li, H.; Dou, J.; Wang, Q.; He, W.; Wang, C.; Li, D.; Lin, J.M.; Zhang, Y. Stable and Biocompatible Carbon Nanotube Ink Mediated by Silk Protein for Printed Electronics. Adv. Mater. 2020, 32, e2000165. [Google Scholar] [CrossRef] [PubMed]
- Bellani, S.; Petroni, E.; Del Rio Castillo, A.E.; Curreli, N.; Martín-García, B.; Oropesa-Nuñez, R.; Prato, M.; Bonaccorso, F. Scalable Production of Graphene Inks via Wet-Jet Milling Exfoliation for Screen-Printed Micro-Supercapacitors. Adv. Funct. Mater. 2019, 29, 1807659. [Google Scholar] [CrossRef] [Green Version]
- An, B.W.; Heo, S.; Ji, S.; Bien, F.; Park, J.U. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nat. Commun. 2018, 9, 2458. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Zhou, T.; Yin, Y.; Cao, R.; Li, C.; Wang, Z.L. Transparent and Flexible Triboelectric Sensing Array for Touch Security Applications. ACS Nano 2017, 11, 8364–8369. [Google Scholar] [CrossRef] [PubMed]
- Liu, N.; Chortos, A.; Lei, T.; Jin, L.; Kim, T.R.; Bae, W.G.; Zhu, C.; Wang, S.; Pfattner, R.; Chen, X.; et al. Ultratransparent and stretchable graphene electrodes. Sci. Adv. 2017, 3, e170015. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Zhu, Y.; Jiang, W. A stretchable and transparent strain sensor based on sandwich-like PDMS/CNTs/PDMS composite containing an ultrathin conductive CNT layer. Compos. Sci. Technol. 2020, 186, 107938. [Google Scholar] [CrossRef]
- Teo, M.Y.; Kim, N.; Kee, S.; Kim, B.S.; Kim, G.; Hong, S.; Jung, S.; Lee, K. Highly stretchable and highly conductive PEDOT:PSS/Ionic liquid composite transparent electrodes for solution-processed stretchable electronics. ACS Appl. Mater. Interfaces 2017, 9, 819–826. [Google Scholar] [CrossRef]
- Li, W.; Yang, S.; Shamim, A. Screen printing of silver nanowires: Balancing conductivity with transparency while maintaining flexibility and stretchability. npj Flex. Electron. 2019, 3, 13. [Google Scholar] [CrossRef]
- Shi, H.; Al-Rubaiai, M.; Holbrook, C.M.; Miao, J.; Pinto, T.; Wang, C.; Tan, X. Screen-Printed Soft Capacitive Sensors for Spatial Mapping of Both Positive and Negative Pressures. Adv. Funct. Mater. 2019, 29, 1809116. [Google Scholar] [CrossRef]
- Teng, L.; Ye, S.; Handschuh-Wang, S.; Zhou, X.; Gan, T.; Zhou, X. Liquid Metal-Based Transient Circuits for Flexible and Recyclable Electronics. Adv. Funct. Mater. 2019, 29, 1808739. [Google Scholar] [CrossRef]
- Peng, H.; Xin, Y.; Xu, J.; Liu, H.; Zhang, J. Ultra-stretchable hydrogels with reactive liquid metals as asymmetric force-sensors. Mater. Horizons 2019, 6, 618–625. [Google Scholar] [CrossRef]
- Kim, K.; Choi, J.; Jeong, Y.; Cho, I.; Kim, M.; Kim, S.; Oh, Y.; Park, I. Highly Sensitive and Wearable Liquid Metal-Based Pressure Sensor for Health Monitoring Applications: Integration of a 3D-Printed Microbump Array with the Microchannel. Adv. Healthc. Mater. 2019, 8, e1900978. [Google Scholar] [CrossRef] [PubMed]
- Ansari, M.Z.; Parveen, N.; Nandi, D.K.; Ramesh, R.; Ansari, S.A.; Cheon, T.; Kim, S.H. Enhanced activity of highly conformal and layered tin sulfide (SnSx) prepared by atomic layer deposition (ALD) on 3D metal scaffold towards high performance supercapacitor electrode. Sci. Rep. 2019, 9, 10225. [Google Scholar] [CrossRef] [PubMed]
- Tang, Z.; Jia, S.; Wang, F.; Bian, C.; Chen, Y.; Wang, Y.; Li, B. Highly Stretchable Core-Sheath Fibers via Wet-Spinning for Wearable Strain Sensors. ACS Appl. Mater. Interfaces 2018, 10, 6624–6635. [Google Scholar] [CrossRef] [PubMed]
- Bautista-Quijano, J.R.; Torres, R.; Kanoun, O. Flexible strain sensing filaments based on styrene-butadiene-styrene co-polymer mixed with carbon particle filled thermoplastic polyurethane. In Proceedings of the 2018 Nanotechnology for Instrumentation and Measurement (NANOfIM), Mexico City, Mexico, 7–8 November 2018; pp. 1–3. [Google Scholar]
- Zhou, J.; Xu, X.; Xin, Y.; Lubineau, G. Coaxial Thermoplastic Elastomer-Wrapped Carbon Nanotube Fibers for Deformable and Wearable Strain Sensors. Adv. Funct. Mater. 2018, 28, 1705591. [Google Scholar] [CrossRef]
- Torres, R.; Cheng, Z.; Ramalingame, R.; Kanoun, O. Electrical characterization of elongation sensors based on SBS-CTPU filaments. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals & Devices (SSD), Yassmine Hammamet, Tunisia, 19–22 March 2018; pp. 1212–1215. [Google Scholar]
- Feng, P.; Yuan, Y.; Zhong, M.; Shao, J.; Liu, X.; Xu, J.; Zhang, J.; Li, K.; Zhao, W. Integrated Resistive-Capacitive Strain Sensors Based on Polymer-Nanoparticle Composites. ACS Appl. Nano Mater. 2020, 3, 4357–4366. [Google Scholar] [CrossRef]
- Suzuki, K.; Yataka, K.; Okumiya, Y.; Sakakibara, S.; Sako, K.; Mimura, H.; Inoue, Y. Rapid-Response, Widely Stretchable Sensor of Aligned MWCNT/Elastomer Composites for Human Motion Detection. ACS Sensors 2016, 1, 817–825. [Google Scholar] [CrossRef]
- Cai, L.; Song, L.; Luan, P.; Zhang, Q.; Zhang, N.; Gao, Q.; Zhao, D.; Zhang, X.; Tu, M.; Yang, F.; et al. Super-stretchable, transparent carbon nanotube-based capacitive strain sensors for human motion detection. Sci. Rep. 2013, 3, 3048. [Google Scholar] [CrossRef] [Green Version]
- Slobodian, P.; Danova, R.; Olejnik, R.; Matyas, J.; Münster, L. Multifunctional flexible and stretchable polyurethane/carbon nanotube strain sensor for human breath monitoring. Polym. Adv. Technol. 2019, 30, 1891–1898. [Google Scholar] [CrossRef]
- Zhang, R.; Ying, C.; Gao, H.; Liu, Q.; Fu, X.; Hu, S. Highly flexible strain sensors based on polydimethylsiloxane/carbon nanotubes (CNTs) prepared by a swelling/permeating method and enhanced sensitivity by CNTs surface modification. Compos. Sci. Technol. 2019, 171, 218–225. [Google Scholar] [CrossRef]
- Pu, J.H.; Zha, X.J.; Zhao, M.; Li, S.; Bao, R.Y.; Liu, Z.Y.; Xie, B.H.; Yang, M.B.; Guo, Z.; Yang, W. 2D end-to-end carbon nanotube conductive networks in polymer nanocomposites: A conceptual design to dramatically enhance the sensitivities of strain sensors. Nanoscale 2018, 10, 2191–2198. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Pei, Y.; Ma, S.; Sun, X.; Singler, T.J. Inkjet Printing Controllable Polydopamine Nanoparticle Line Array for Transparent and Flexible Touch-Sensing Application. Adv. Eng. Mater. 2020, 22, 1901351. [Google Scholar] [CrossRef]
- Ferreira, G.; Goswami, S.; Nandy, S.; Pereira, L.; Martins, R.; Fortunato, E. Touch-Interactive Flexible Sustainable Energy Harvester and Self-Powered Smart Card. Adv. Funct. Mater. 2020, 30, 1908994. [Google Scholar] [CrossRef]
- Yin, X.Y.; Zhang, Y.; Cai, X.; Guo, Q.; Yang, J.; Wang, Z.L. 3D printing of ionic conductors for high-sensitivity wearable sensors. Mater. Horizons 2019, 6, 767–780. [Google Scholar] [CrossRef]
- Kweon, O.Y.; Lee, S.J.; Oh, J.H. Wearable high-performance pressure sensors based on three-dimensional electrospun conductive nanofibers. NPG Asia Mater. 2018, 10, 540–551. [Google Scholar] [CrossRef]
- Vieira, E.M.F.; Silva, J.P.B.; Veltruská, K.; Matolin, V.; Pires, A.L.; Pereira, A.M.; Gomes, M.J.M.; Goncalves, L.M. Highly sensitive thermoelectric touch sensor based on p-type SnO x thin film. Nanotechnology 2019, 30, 435502. [Google Scholar] [CrossRef]
- Hussain, S.; Chae, J.; Akbar, K.; Vikraman, D.; Truong, L.; Naqvi, B.A.; Abbas, Y.; Kim, H.S.; Chun, S.H.; Kim, G.; et al. Fabrication of robust hydrogen evolution reaction electrocatalyst using ag2se by vacuum evaporation. Nanomaterials 2019, 9, 1460. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic Skin: Recent Progress and Future Prospects for Skin-Attachable Devices for Health Monitoring, Robotics, and Prosthetics. Adv. Mater. 2019, 31, 1904765. [Google Scholar] [CrossRef] [Green Version]
- Asghar, W.; Li, F.; Zhou, Y.; Wu, Y.; Yu, Z.; Li, S.; Tang, D.; Han, X.; Shang, J.; Liu, Y.; et al. Piezocapacitive Flexible E-Skin Pressure Sensors Having Magnetically Grown Microstructures. Adv. Mater. Technol. 2020, 5, 1900934. [Google Scholar] [CrossRef]
- Park, S.; Shin, B.G.; Jang, S.; Chung, K. Three-Dimensional Self-Healable Touch Sensing Artificial Skin Device. ACS Appl. Mater. Interfaces 2020, 12, 3953–3960. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Huang, J.; Yang, J.; Wang, Q.; Lu, P.; Yang, J.; Zhang, J.; Huang, S.; Wu, Z.; et al. Natural Plant Materials as Dielectric Layer for Highly Sensitive Flexible Electronic Skin. Small 2018, 14, 1801657. [Google Scholar] [CrossRef] [PubMed]
- Jeong, C.; Ko, H.; Kim, H.T.; Sun, K.; Kwon, T.H.; Jeong, H.E.; Park, Y. Bin Bioinspired, High-Sensitivity Mechanical Sensors Realized with Hexagonal Microcolumnar Arrays Coated with Ultrasonic-Sprayed Single-Walled Carbon Nanotubes. ACS Appl. Mater. Interfaces 2020, 12, 18813–18822. [Google Scholar] [CrossRef] [PubMed]
- Heo, J.S.; Eom, J.; Kim, Y.H.; Park, S.K. Recent Progress of Textile-Based Wearable Electronics: A Comprehensive Review of Materials, Devices, and Applications. Small 2018, 14, 1703034. [Google Scholar] [CrossRef] [PubMed]
- Ismar, E.; Kurşun Bahadir, S.; Kalaoglu, F.; Koncar, V. Futuristic Clothes: Electronic Textiles and Wearable Technologies. Glob. Challenges 2020, 4, 1900092. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Afroj, S.; Karim, N.; Wang, Z.; Tan, S.; He, P.; Holwill, M.; Ghazaryan, D.; Fernando, A.; Novoselov, K.S. Engineering Graphene Flakes for Wearable Textile Sensors via Highly Scalable and Ultrafast Yarn Dyeing Technique. ACS Nano 2019, 13, 3847–3857. [Google Scholar] [CrossRef] [Green Version]
- Zaporotskova, I.V.; Boroznina, N.P.; Parkhomenko, Y.N.; Kozhitov, L.V. Carbon nanotubes: Sensor properties. A review. Mod. Electron. Mater. 2016, 2, 95–105. [Google Scholar] [CrossRef]
- Hasanpour, S.; Rashidi, A.; Walsh, T.; Pagan, E.; Milani, A.S.; Akbari, M.; Djilali, N. Electrode-Integrated Textile-Based Sensors for in Situ Temperature and Relative Humidity Monitoring in Electrochemical Cells. ACS Omega 2021, 6, 9509–9519. [Google Scholar] [CrossRef]
- Wu, R.; Ma, L.; Hou, C.; Meng, Z.; Guo, W.; Yu, W.; Yu, R.; Hu, F.; Liu, X.Y. Silk Composite Electronic Textile Sensor for High Space Precision 2D Combo Temperature–Pressure Sensing. Small 2019, 15, e1901558. [Google Scholar] [CrossRef]
- Sala de Medeiros, M.; Chanci, D.; Moreno, C.; Goswami, D.; Martinez, R.V. Waterproof, Breathable, and Antibacterial Self-Powered e-Textiles Based on Omniphobic Triboelectric Nanogenerators. Adv. Funct. Mater. 2019, 29, 1703034. [Google Scholar] [CrossRef]
- Tessarolo, M.; Gualandi, I.; Fraboni, B. Recent progress in wearable fully textile chemical sensors. Adv. Mater. Technol. 2018, 3, 1700310. [Google Scholar] [CrossRef]
- Kamarudin, S.F.; Mustapha, M.; Kim, J.K. Green Strategies to Printed Sensors for Healthcare Applications. Polym. Rev. 2021, 61, 116–156. [Google Scholar] [CrossRef]
- Xu, H.; Liu, J.; Zhang, J.; Zhou, G.; Luo, N.; Zhao, N. Flexible Organic/Inorganic Hybrid Near-Infrared Photoplethysmogram Sensor for Cardiovascular Monitoring. Adv. Mater. 2017, 29, 1700975. [Google Scholar] [CrossRef] [PubMed]
- Gong, M.; Wan, P.; Ma, D.; Zhong, M.; Liao, M.; Ye, J.; Shi, R.; Zhang, L. Flexible Breathable Nanomesh Electronic Devices for On-Demand Therapy. Adv. Funct. Mater. 2019, 29, 1902127. [Google Scholar] [CrossRef]
- Pietroiusti, A.; Stockmann-Juvala, H.; Lucaroni, F.; Savolainen, K. Nanomaterial exposure, toxicity, and impact on human health. Wiley Interdiscip. Rev. Nanomed. Nanobiotechnol. 2018, 10, e1513. [Google Scholar] [CrossRef] [PubMed]
- Hussain, A.M.; Hussain, M.M. CMOS-Technology-Enabled Flexible and Stretchable Electronics for Internet of Everything Applications. Adv. Mater. 2016, 28, 4219–4249. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).