
Assessing the Impacts of Autonomous Vehicles on Road Congestion Using Microsimulation


Abstract
:1. Introduction and Previous Work
2. Car-Following Models
2.1. Introduction
2.2. Car-Following Models in This Study
- The Helly model, as a car-following model, to model autonomous-vehicle behaviour;
- An IDM+ model to model non-autonomous-vehicle behaviour;
- A VISSIM model, which is a traffic-microsimulation tool with an external car-following model. This is because it was not possible to access or use the VISSIM’s car-following model and it was not possible to utilise it to model autonomous vehicles. The VISSIM model was also used to model the lane-changing behaviour of the entire corridor. A brief description of each of these models is discussed in this section.
2.2.1. Helly Model
2.2.2. The IDM+ Model
2.2.3. VISSIM Model
3. Methodology
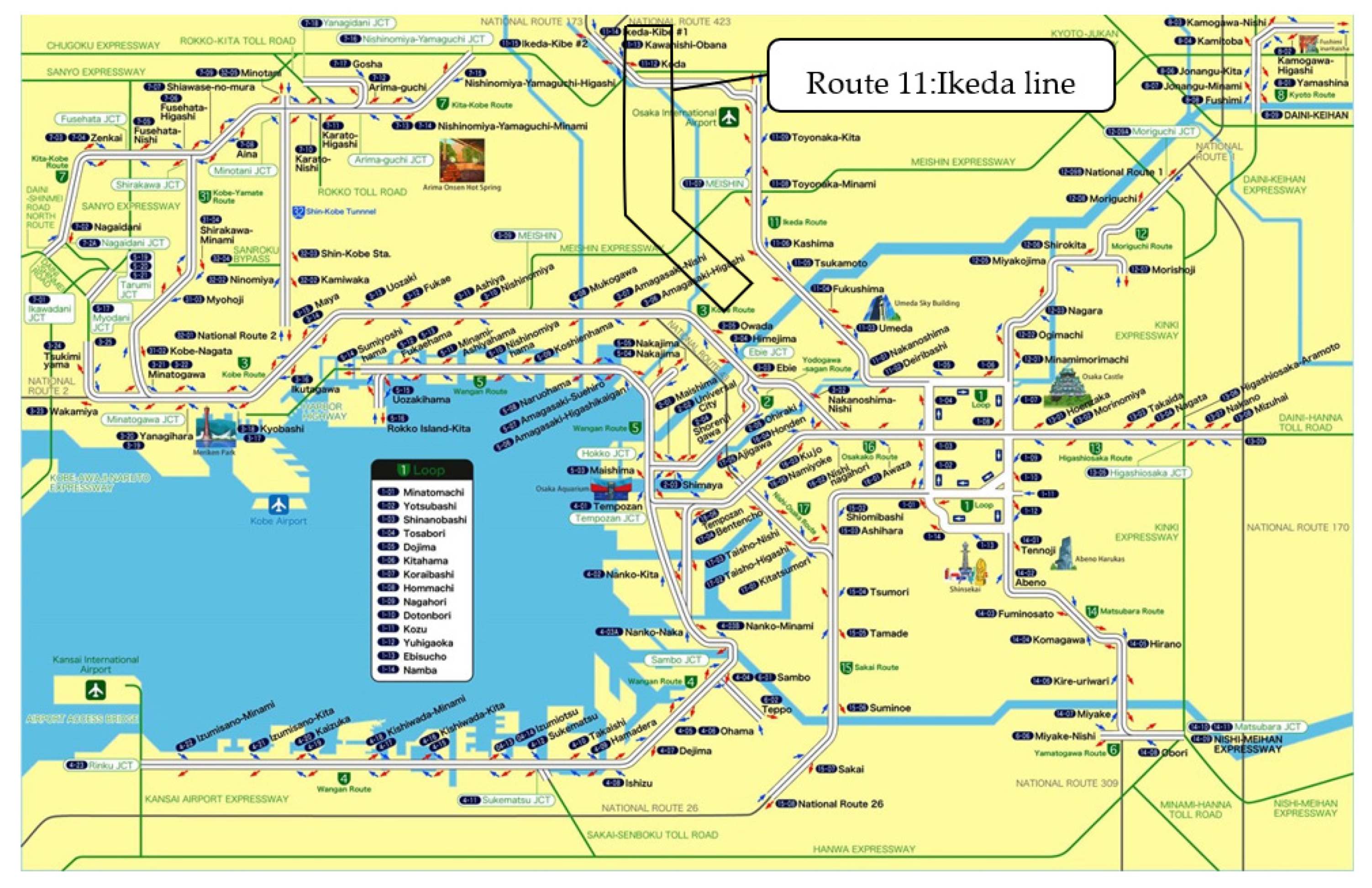
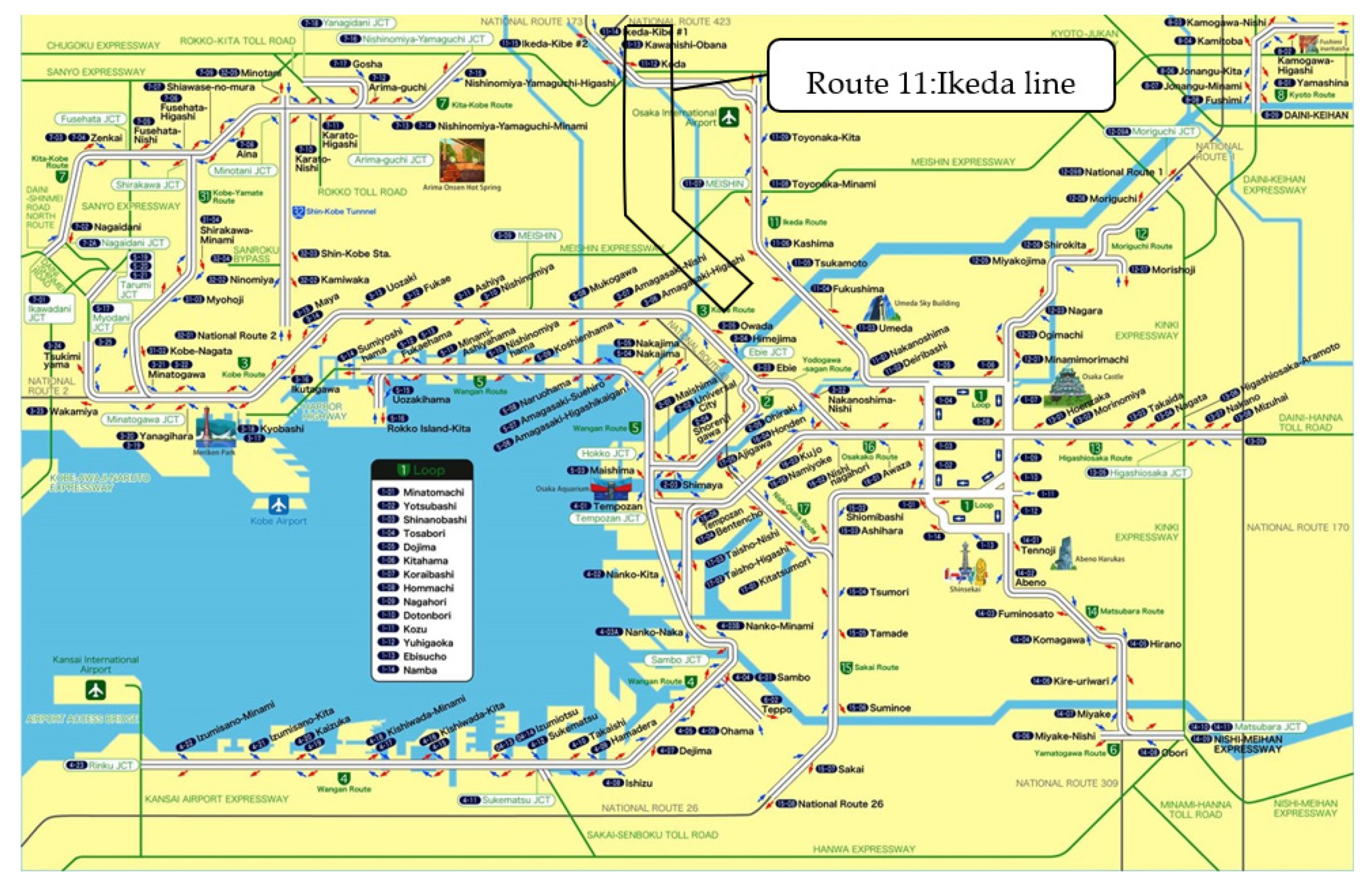
3.1. General Description of Case Study
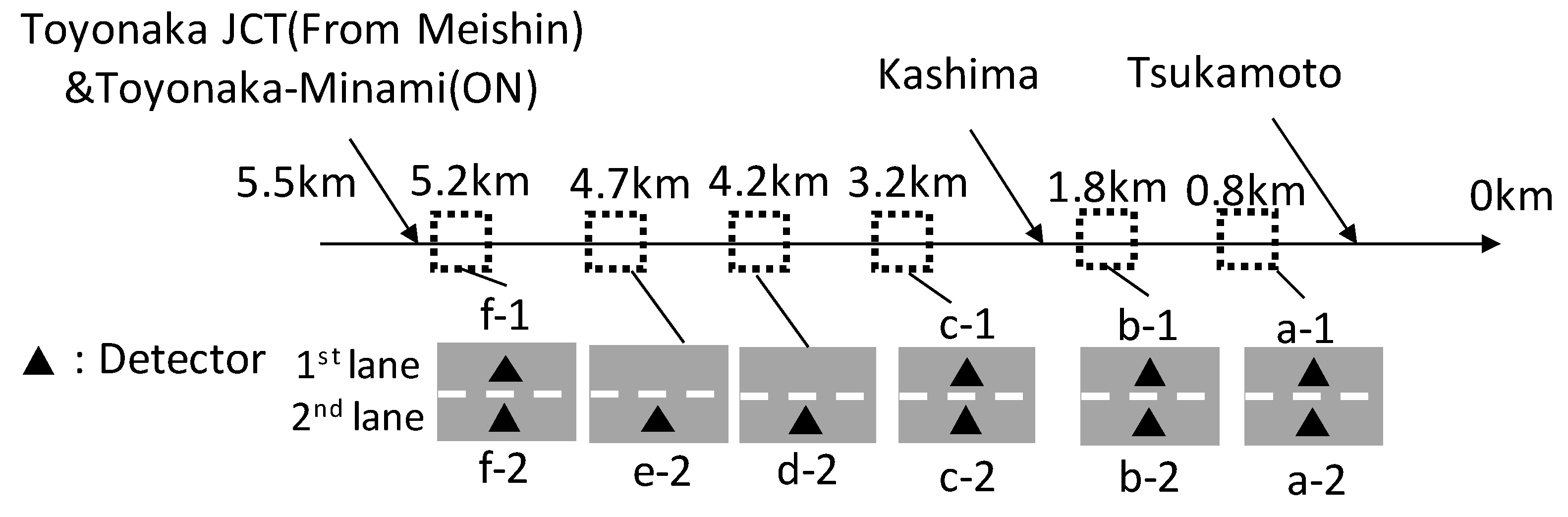
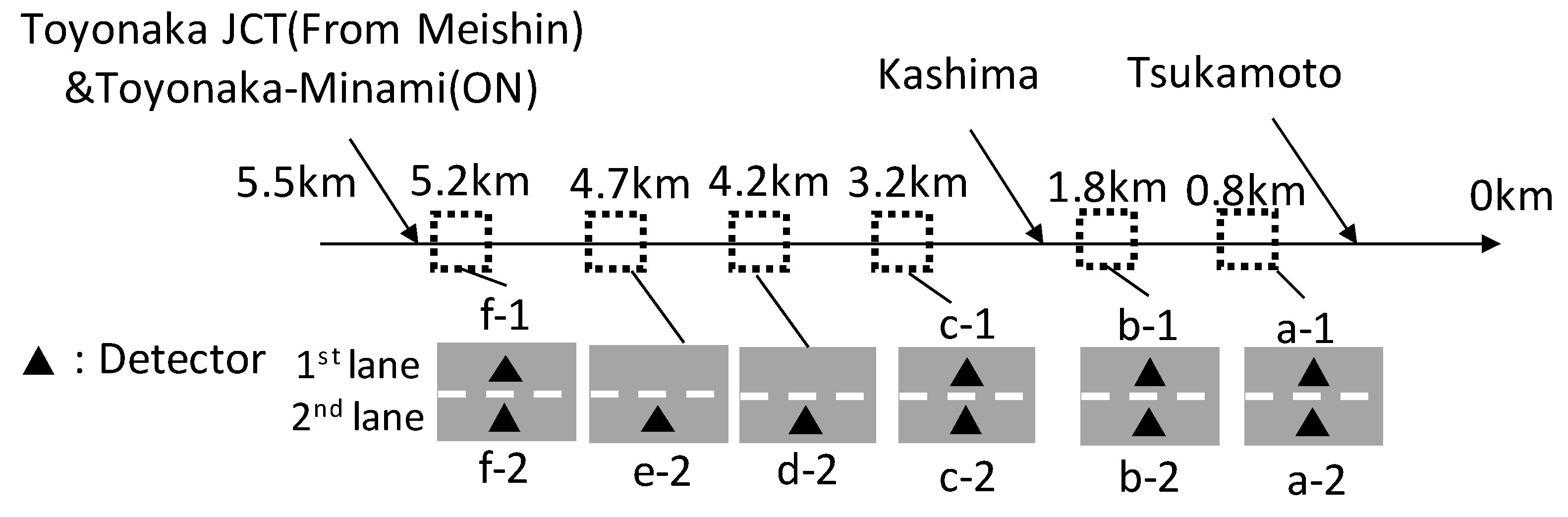
3.2. Traffic Characteristics of the Ikeda Line
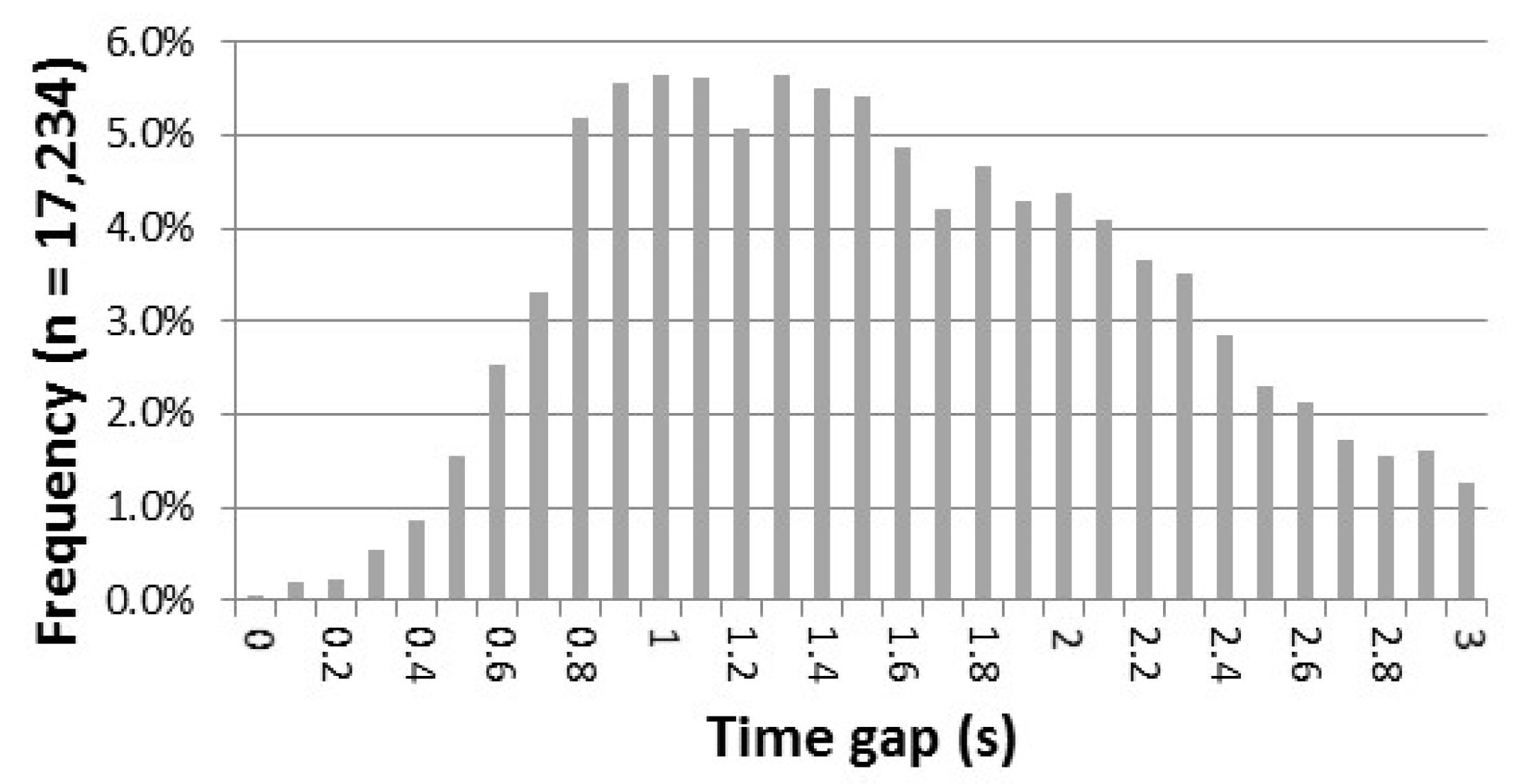
3.3. Analysis of Traffic Characteristics
- Increasing the toll fee;
- Implement toll discount during early morning or late evening time periods;
- Operate traffic control ramps;
- Construct new roads and bridge;
- Increasing the toll fee is showing good impact on reducing traffic congestion.
4. Modelling Process
5. Analysis of the Results
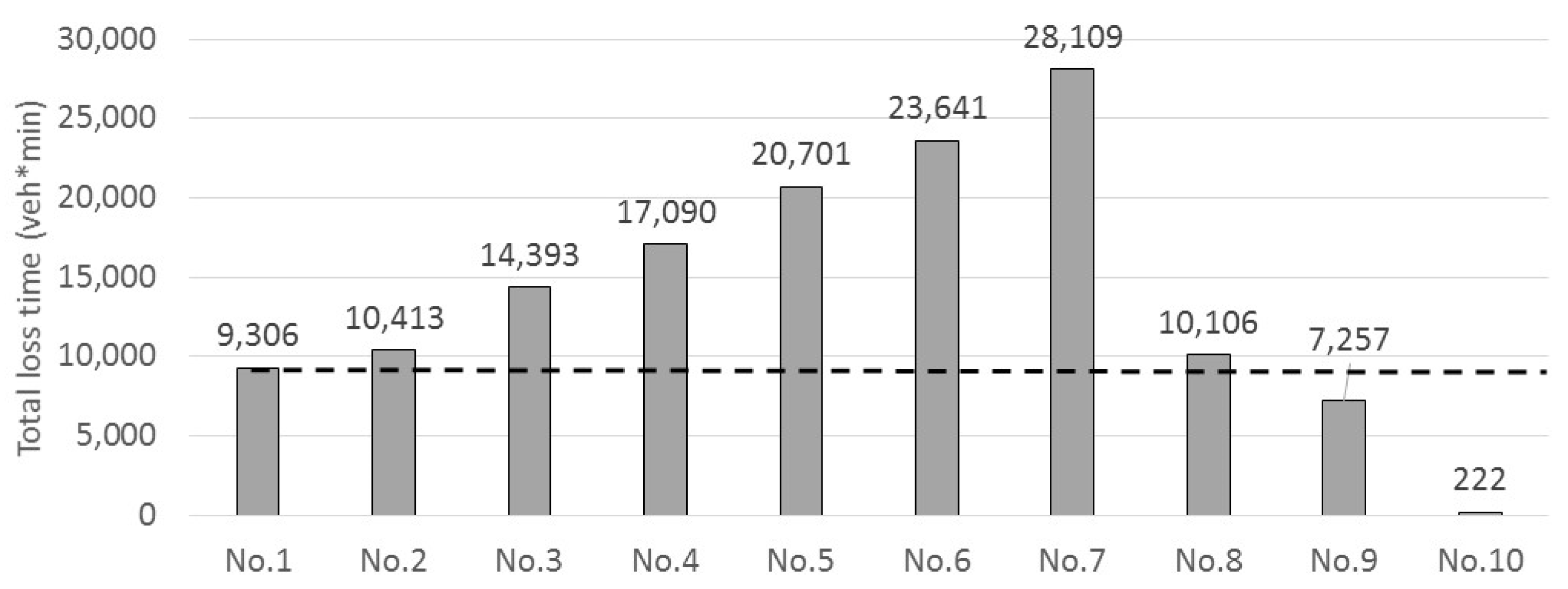
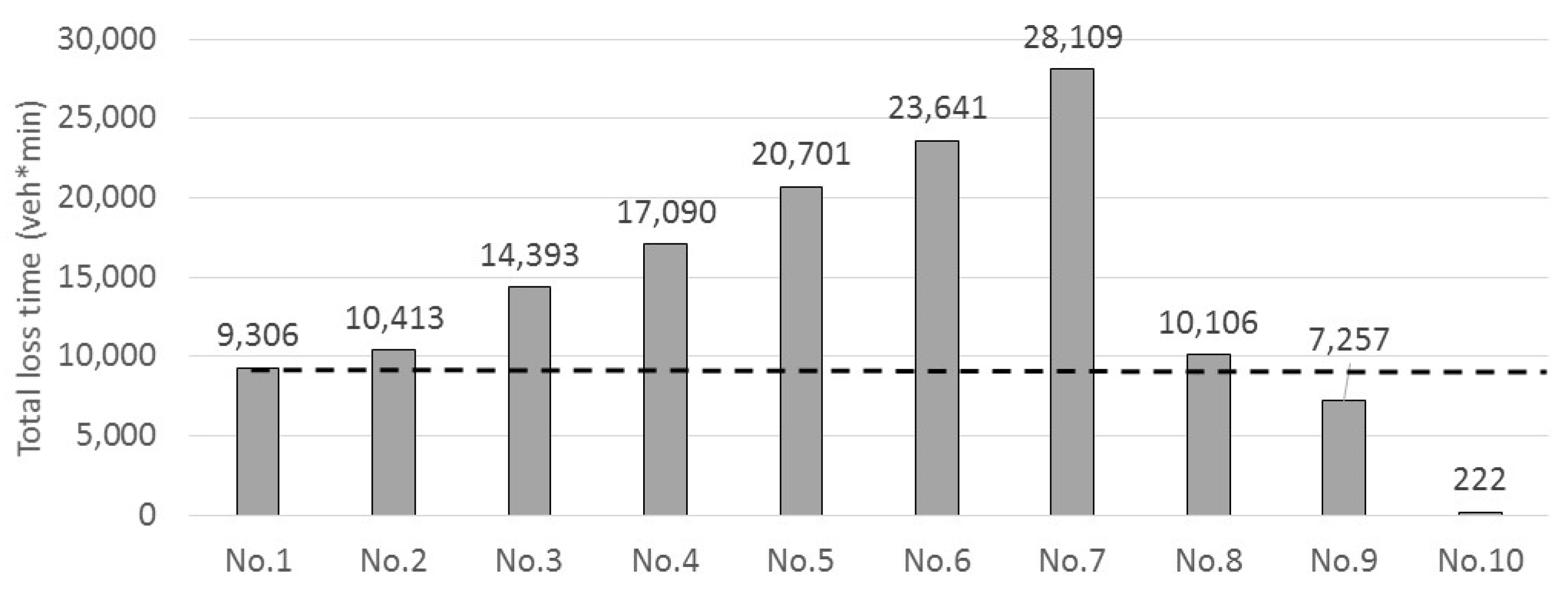
5.1. Analysis of Loss Time
5.2. Analysis of Impacts on Congestion
6. Discussions and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Helly, W. Simulation of Bottlenecks in Single Lane Traffic Flow. In International Symposium on the Theory of Traffic Flow; INFORMS: New York, NY, USA, 1959. [Google Scholar]
- Gipps, P.G. A behavioural car following model for computer simulation. Transp. Res. B 1981, 15, 105–111. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. 1995, E51, 1035–1042. [Google Scholar] [CrossRef] [PubMed]
- Biagio, C.; Vincenzo, P.; Marcello, M. Thirty Years of Gipps’ Car-Following Model. Transp. Res. Rec. J. Transp. Res. Board 2012, 2315, 89–99. [Google Scholar] [CrossRef]
- Martin, T.; Ansgar, H.; Dirk, H. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805–1824. [Google Scholar]
- Schakel, W.J.; van Arem, B.; Bart, D. Netten: Effects of Cooperative Adaptive Cruise Control on traffic flow stability. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Madeira, Portugal, 19–22 September 2010. [Google Scholar]
- NHTSA (National Highway Traffic Safety Administration). Available online: https://www.nhtsa.gov/ (accessed on 20 September 2018).
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 4, 545–567. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Mogno, C.; Ciuffo, B.; Fontaras, G. The impact of automation and connectivity on traffic flow and CO2 emissions. A detailed microsimulation study. Atmos. Environ. 2020, 226, 117399. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Heaslip, K.P.; Aad, M.A.; Fuentes, A.; Goodall, N. Assessing the impact of automated and connected automated vehicles on Virginia freeways. Transp. Res. Rec. 2021, 2675, 870–884. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Ciuffo, B.; Raposo, M.A.; Thiel, C. Assessing the impact of connected and automated vehicles. A freeway scenario. In Advanced Microsystems for Automotive Applications; Springer: Cham, Switzerland, 2017; pp. 213–225. [Google Scholar]
- Yu, H.; Jiang, R.; He, Z.; Zheng, Z.; Li, L.; Liu, R.; Chen, X. Automated vehicle-involved traffic flow studies: A survey of assumptions, models, speculations, and perspectives. Transp. Res. Part C Emerg. Technol. 2021, 127, 103101. [Google Scholar] [CrossRef]
- Shang, M.; Rosenblad, B.; Stern, R. A novel asymmetric car following model for driver-assist enabled vehicle dynamics. IEEE Trans. Intell. Transp. Syst. 2022, in press. [CrossRef]
- Martin, T.; Dirk, H. Microsimulations of Freeway Traffic Including Control Measures. Automatisierungstechnik 2001, 49, 478–484. [Google Scholar]
- Suzuki, K.; Yamada, K.; Horiguchi, R.; Iwatake, K. Impact Assessment of Future Performance of Adaptive Cruise Control for Congestion Mitigation at Expressway Sag Sections. J. Jpn. Soc. Traffic Eng. 2015, 1, 60–67. (In Japanese) [Google Scholar]
- Kesting, A.; Treiber, M.; Schönhof, M.; Helbing, D. Adaptive cruise control design for active congestion avoidance. Transp. Res. Part C 2008, 16, 668–683. [Google Scholar] [CrossRef]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Higatani, A.; Saleh, W. An Investigation into the Appropriateness of Car-Following Models in Assessing Autonomous Vehicles. Sensors 2021, 21, 7131. [Google Scholar] [CrossRef] [PubMed]
- Ararat, O.; Kural, E.; Guvenc, B.A. Development of a collision warning system for Adaptive Cruise Control vehicles using a comparison analysis of recent algorithms. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006; pp. 194–199. [Google Scholar]
- Manjunath, K.G.; Jaisankar, N. A Survey on Rear End Collision Avoidance System for Automobiles. Int. J. Eng. Technol. 2013, 5, 1368–1372. [Google Scholar]
- Akito, H.; Wafaa, S. The Impact of Autonomous Vehicles on Traffic Flow. In Proceedings of the TDM 2021: 10th International Symposium on Travel Demand Management, Dublin, Ireland, 17–19 November 2021. [Google Scholar]
- PTV VISSIM 10 User Manual; PTV: Karlsruhe, Germany, 2018.
- Goñi-Ros, B.; Knoop, V.L.; Takahashi, T.; Sakata, I.; van Arem, B.; Hoogendoorn, S.P. Optimization of traffic flow at freeway sags by controlling the acceleration of vehicles equipped with in-car systems. Transp. Res. Part C Emerg. Technol. 2016, 71, 1–18. [Google Scholar] [CrossRef] [Green Version]
- ZTD (Zen Traffic Data). Available online: https://zen-traffic-data.net/english/ (accessed on 20 May 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main features to be represented in models | Desired Time-Gap or Desired Gap |
| Collision-Avoidance System | |
| Sensor Detection Range |
| Setting | k1,setting | k2,setting | k3,setting |
|---|---|---|---|
| Very Short (VS) | 1.8 | 8.0 | 2.52 |
| Short (S) | 1.5 | 6.3 | 2.07 |
| Middle (M) | 1.2 | 4.7 | 1.62 |
| Long (L) | 0.9 | 3.0 | 1.17 |
| Case | Non-AV with IDM+ | AV with Helly (FACC) Model | Note |
|---|---|---|---|
| No.1 | 100% | 0% | No AV |
| No.2 | 95% | 5% | amax = 0.6 m/s2 Compositon of Avs’ time gap setting Very short 33% Short 29% Middle 24% Long 14% |
| No.3 | 90% | 10% | |
| No.4 | 85% | 15% | |
| No.5 | 75% | 25% | |
| No.6 | 50% | 50% | |
| No.7 | 0% | 100% | |
| No.8 | 75% | 25% | amax = 1.4 m/s2 Compositon of Avs’ time gap setting is same as No.2 to No.7 |
| No.9 | 0% | 100% | |
| No.10 | 0% | 100% | amax = 0.6 m/s2 Very short 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malibari, A.; Higatani, A.; Saleh, W. Assessing the Impacts of Autonomous Vehicles on Road Congestion Using Microsimulation. Sensors 2022, 22, 4407. https://doi.org/10.3390/s22124407
Malibari A, Higatani A, Saleh W. Assessing the Impacts of Autonomous Vehicles on Road Congestion Using Microsimulation. Sensors. 2022; 22(12):4407. https://doi.org/10.3390/s22124407
Chicago/Turabian StyleMalibari, Areej, Akito Higatani, and Wafaa Saleh. 2022. "Assessing the Impacts of Autonomous Vehicles on Road Congestion Using Microsimulation" Sensors 22, no. 12: 4407. https://doi.org/10.3390/s22124407
APA StyleMalibari, A., Higatani, A., & Saleh, W. (2022). Assessing the Impacts of Autonomous Vehicles on Road Congestion Using Microsimulation. Sensors, 22(12), 4407. https://doi.org/10.3390/s22124407