An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments


Abstract
:1. Introduction
2. System Architecture and Mathematical Models
2.1. Full IMU Mechanization
2.2. LiDAR SLAM
2.3. INS/LiDAR Integration
2.4. System Model
2.5. Measurement Model
3. Data Source and Case Studies
4. Analysis and Results
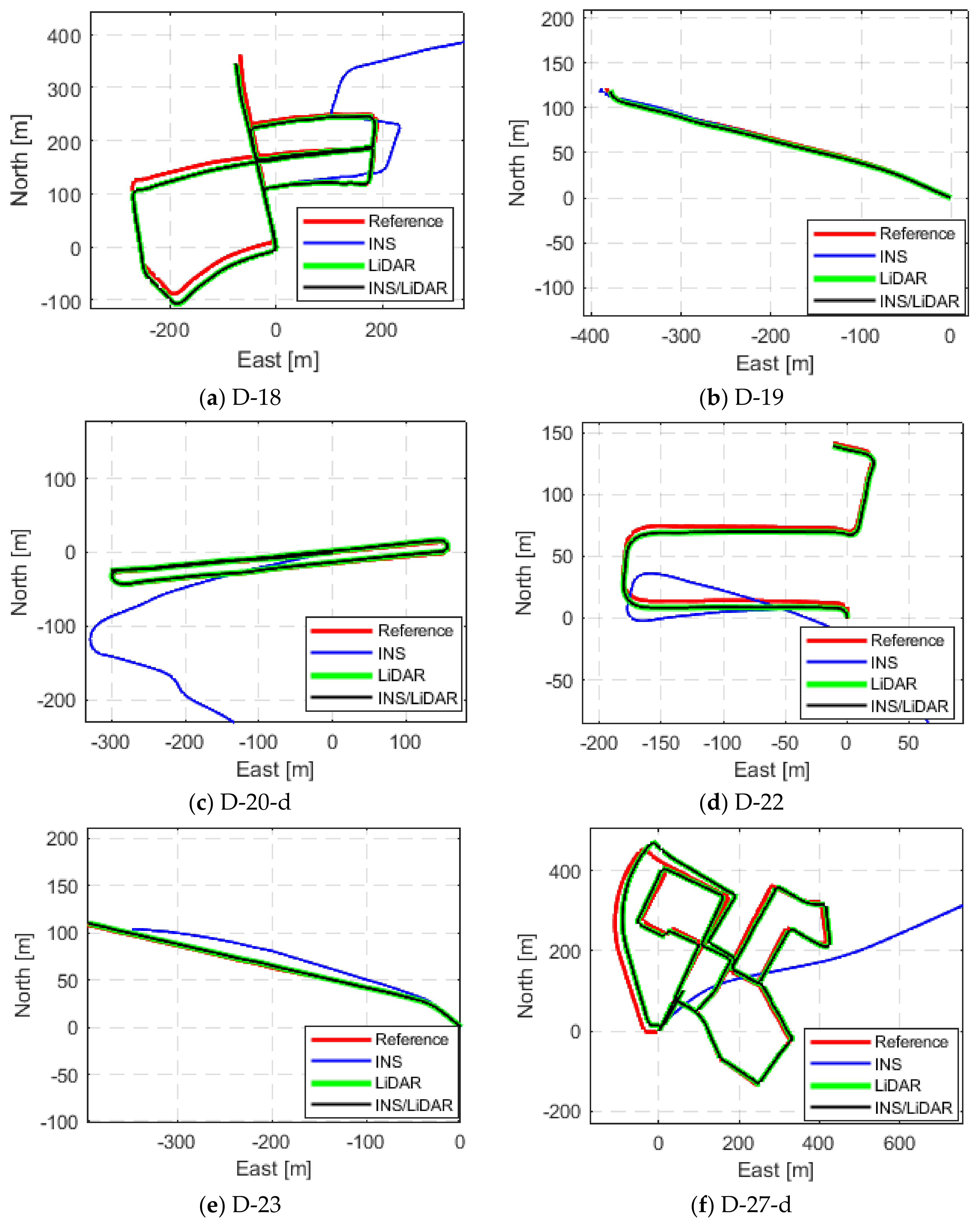
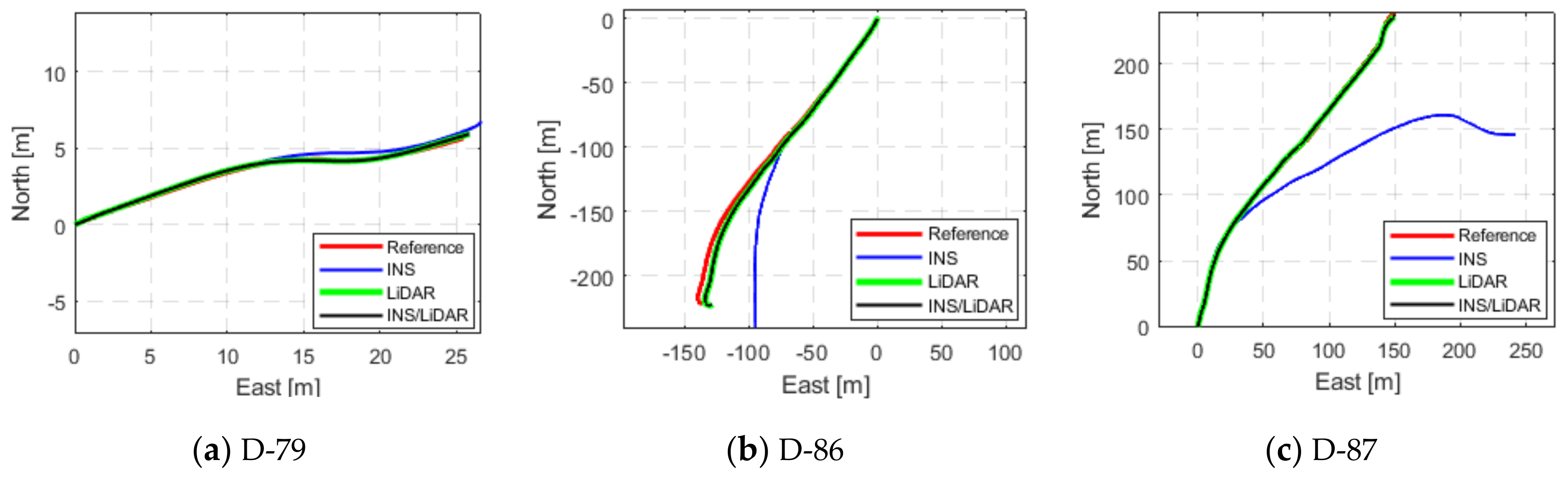
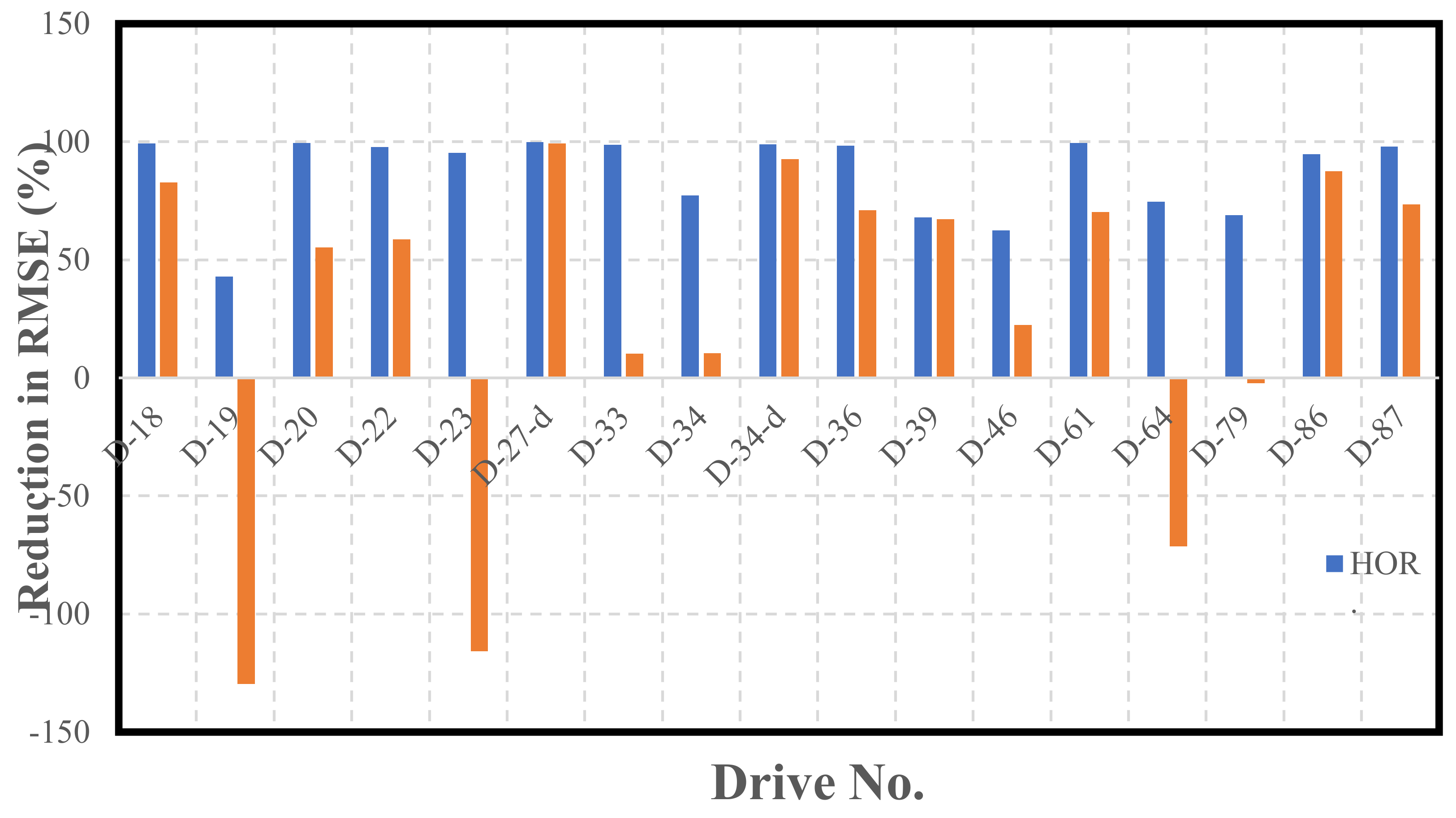
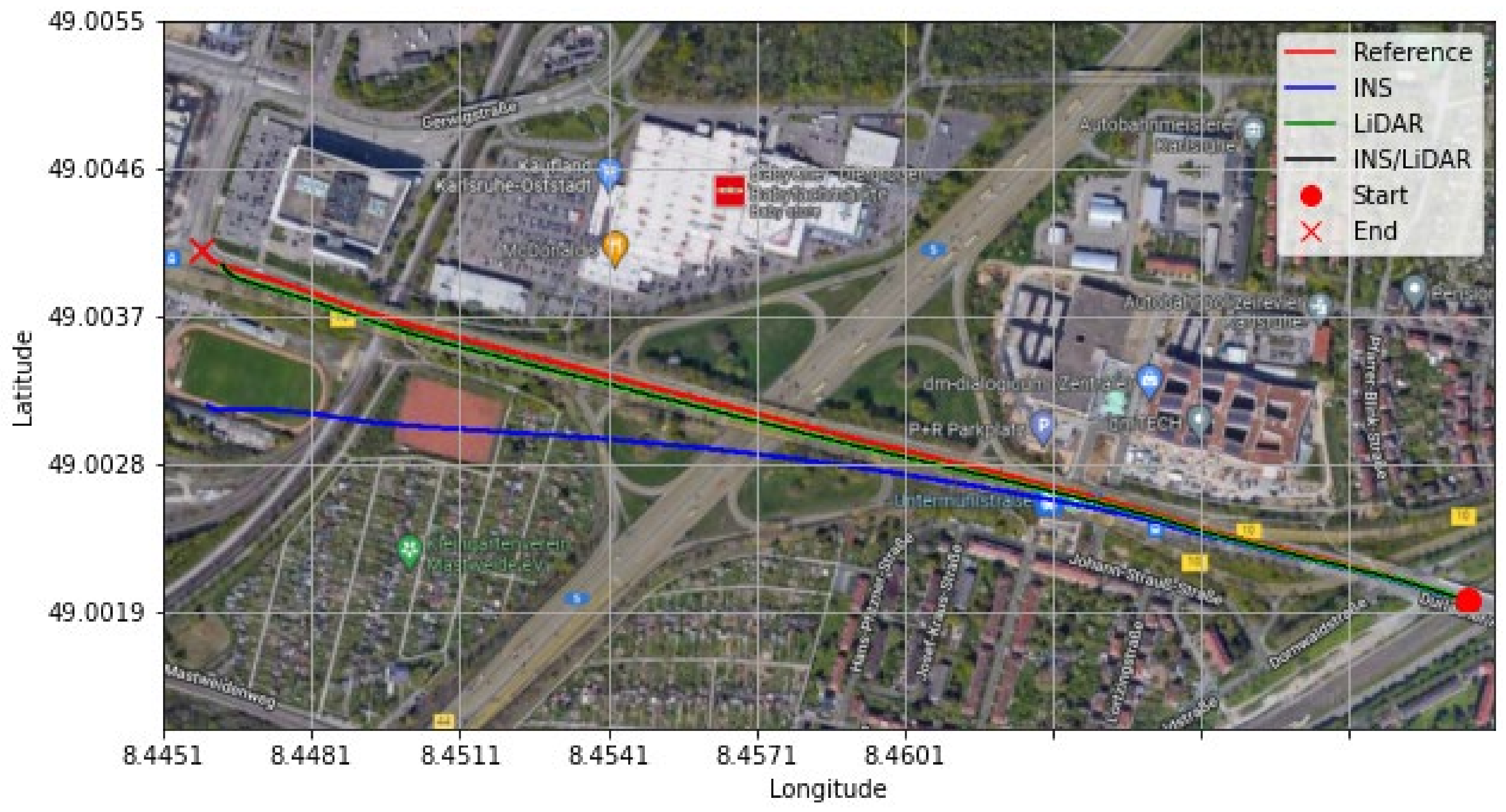
4.1. First Case Study—Residential Datasets (Complete GNSS Outage)
4.1.1. Sample Relatively Short Residential Dataset
4.1.2. Sample Relatively Long Residential Dataset
4.1.3. KITTI Residential Datasets
4.2. Second Case Study—Highway Datasets (Complete GNSS Outage)
4.2.1. Sample Relatively Short Highway Dataset
4.2.2. Sample Relatively Long Highway Dataset
4.2.3. KITTI Highway Datasets
4.3. Third Case Study—GNSS Assistance
4.3.1. Sample Residential Dataset (GNSS-Assisted)
4.3.2. Sample Highway Dataset (GNSS-Assisted)
5. Comparison to State-Of-The-Art SLAM Algorithms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Residential Datasets

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 870.78 | 1252.61 | 3118.31 | −0.50 | 3.34 | 7.35 | −0.50 | 3.34 | 7.35 |
| North | 130.45 | 229.34 | 482.44 | −9.51 | 11.88 | 20.71 | −9.51 | 11.88 | 20.71 |
| Horizontal | 901.05 | 1273.43 | 3155.41 | 10.24 | 12.34 | 20.72 | 10.24 | 12.34 | 20.72 |
| Up | 17.78 | 23.83 | 56.71 | 3.71 | 4.20 | 10.54 | 3.94 | 4.72 | 9.81 |
| Roll | 0.119 | 0.740 | 1.763 | 0.274 | 1.151 | 2.482 | 0.130 | 0.735 | 1.767 |
| Pitch | −0.036 | 0.641 | 1.651 | −0.285 | 0.898 | 2.841 | −0.039 | 0.631 | 1.639 |
| Yaw | 2.123 | 3.100 | 4.776 | 0.989 | 1.277 | 2.742 | 2.164 | 3.190 | 5.249 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −3.71 | 4.39 | 7.75 | 2.75 | 2.83 | 4.10 | 2.74 | 2.83 | 4.10 |
| North | 0.29 | 1.73 | 5.01 | −2.97 | 3.04 | 3.56 | −2.97 | 3.04 | 3.56 |
| Horizontal | 4.00 | 4.71 | 9.23 | 4.08 | 4.15 | 5.27 | 4.08 | 4.15 | 5.27 |
| Up | 2.25 | 2.86 | 5.53 | 6.17 | 7.32 | 11.08 | 5.56 | 7.31 | 12.70 |
| Roll | −0.047 | 0.120 | 0.311 | −1.014 | 1.290 | 2.523 | −0.050 | 0.122 | 0.312 |
| Pitch | 0.050 | 0.140 | 0.316 | −1.218 | 1.409 | 2.753 | 0.047 | 0.136 | 0.309 |
| Yaw | 0.169 | 0.220 | 0.497 | −0.575 | 0.638 | 1.456 | 0.170 | 0.221 | 0.497 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −162.07 | 220.09 | 480.21 | −0.90 | 1.00 | 1.95 | −0.90 | 1.00 | 1.95 |
| North | −283.97 | 375.19 | 827.29 | 1.68 | 1.86 | 3.80 | 1.68 | 1.86 | 3.80 |
| Horizontal | 327.41 | 434.98 | 956.56 | 2.02 | 2.11 | 4.01 | 2.02 | 2.11 | 4.01 |
| Up | 3.67 | 5.28 | 13.48 | 3.08 | 3.43 | 6.38 | 3.09 | 3.40 | 6.04 |
| Roll | −0.066 | 0.592 | 0.921 | 0.444 | 1.218 | 1.980 | −0.065 | 0.592 | 0.926 |
| Pitch | −0.020 | 0.481 | 0.875 | −0.292 | 0.953 | 1.936 | −0.021 | 0.483 | 0.872 |
| Yaw | 1.439 | 1.448 | 1.708 | −0.669 | 1.067 | 3.623 | 1.433 | 1.442 | 1.688 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 17.14 | 24.39 | 50.71 | 0.27 | 1.98 | 2.90 | 0.27 | 1.98 | 2.90 |
| North | −76.01 | 107.52 | 267.92 | −3.53 | 3.83 | 5.57 | −3.53 | 3.83 | 5.57 |
| Horizontal | 78.00 | 110.25 | 272.67 | 4.03 | 4.31 | 6.11 | 4.03 | 4.31 | 6.11 |
| Up | 5.67 | 6.97 | 13.17 | 1.92 | 2.20 | 4.01 | 2.21 | 2.76 | 5.45 |
| Roll | 0.127 | 0.461 | 0.902 | −0.313 | 0.592 | 1.373 | 0.126 | 0.452 | 0.888 |
| Pitch | 0.157 | 0.377 | 0.883 | −0.304 | 0.614 | 1.479 | 0.153 | 0.370 | 0.864 |
| Yaw | 0.180 | 0.351 | 0.683 | −0.016 | 0.733 | 1.734 | 0.174 | 0.346 | 0.677 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 15.55 | 21.10 | 47.48 | 0.45 | 0.63 | 1.30 | 0.45 | 0.63 | 1.30 |
| North | 6.63 | 8.25 | 13.72 | 0.83 | 1.29 | 2.20 | 0.83 | 1.29 | 2.20 |
| Horizontal | 18.00 | 22.65 | 47.68 | 1.20 | 1.43 | 2.26 | 1.20 | 1.43 | 2.26 |
| Up | 1.79 | 2.61 | 6.21 | 4.48 | 6.31 | 14.15 | 3.93 | 5.80 | 13.41 |
| Roll | −0.193 | 0.336 | 0.619 | −0.061 | 0.164 | 0.543 | −0.200 | 0.346 | 0.646 |
| Pitch | 0.250 | 0.294 | 0.466 | −1.471 | 1.726 | 3.227 | 0.240 | 0.284 | 0.444 |
| Yaw | 0.107 | 0.196 | 0.353 | −1.015 | 1.027 | 1.380 | 0.108 | 0.198 | 0.363 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 47,110.14 | 62751.46 | 140945.00 | 1.98 | 20.16 | 54.11 | 1.98 | 20.16 | 54.11 |
| North | 13,282.11 | 15,974.94 | 23,896.15 | 2.13 | 23.92 | 62.92 | 2.13 | 23.92 | 62.92 |
| Horizontal | 49,127.97 | 64,752.95 | 142,305.11 | 24.38 | 31.28 | 74.57 | 24.38 | 31.29 | 74.56 |
| Up | 2234.59 | 3017.39 | 6928.42 | 7.24 | 8.23 | 17.69 | 22.01 | 23.81 | 45.11 |
| Roll | 0.120 | 6.341 | 10.456 | 0.296 | 1.775 | 6.077 | 0.143 | 5.749 | 10.012 |
| Pitch | 0.018 | 6.213 | 10.939 | −0.196 | 1.399 | 4.327 | −0.061 | 5.797 | 10.928 |
| Yaw | −1.059 | 3.438 | 8.489 | 8.942 | 42.785 | 269.993 | 1.605 | 4.211 | 9.148 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 39.11 | 73.59 | 168.64 | −0.18 | 5.07 | 8.62 | −0.19 | 5.07 | 8.61 |
| North | 249.35 | 382.20 | 991.30 | −0.96 | 6.63 | 13.08 | −0.96 | 6.63 | 13.07 |
| Horizontal | 254.16 | 389.22 | 1005.54 | 7.92 | 8.35 | 13.38 | 7.92 | 8.35 | 13.37 |
| Up | 11.86 | 13.61 | 20.29 | 6.45 | 7.91 | 16.35 | 6.96 | 9.08 | 18.21 |
| Roll | −0.030 | 0.435 | 1.142 | −0.947 | 2.132 | 5.235 | 0.006 | 0.444 | 0.977 |
| Pitch | −0.028 | 0.615 | 1.195 | 0.074 | 1.937 | 7.026 | 0.014 | 0.573 | 1.117 |
| Yaw | −0.104 | 0.214 | 0.470 | 1.561 | 7.476 | 26.579 | −0.124 | 0.270 | 0.702 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −79.24 | 122.03 | 320.11 | 69.19 | 78.54 | 119.98 | 69.19 | 78.54 | 119.97 |
| North | 96.27 | 147.53 | 421.25 | −4.50 | 9.12 | 17.64 | −4.50 | 9.12 | 17.64 |
| Horizontal | 125.03 | 191.46 | 529.08 | 70.12 | 79.06 | 119.98 | 70.12 | 79.06 | 119.98 |
| Up | 9.30 | 13.07 | 23.81 | 9.81 | 11.40 | 21.19 | 9.65 | 11.75 | 21.31 |
| Roll | 0.223 | 0.367 | 1.146 | −0.544 | 1.351 | 4.481 | 0.277 | 0.444 | 1.334 |
| Pitch | −0.196 | 0.714 | 1.442 | −0.466 | 2.728 | 4.549 | −0.155 | 0.680 | 1.528 |
| Yaw | 0.068 | 0.169 | 0.425 | 10.368 | 10.388 | 12.454 | −0.041 | 0.238 | 0.546 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 484.13 | 795.01 | 1556.31 | −2.90 | 11.08 | 35.52 | −2.90 | 11.08 | 35.52 |
| North | 743.81 | 1806.97 | 5738.22 | −23.26 | 28.30 | 56.44 | −23.26 | 28.30 | 56.44 |
| Horizontal | 1507.41 | 1974.13 | 5805.37 | 25.99 | 30.39 | 59.88 | 25.99 | 30.39 | 59.88 |
| Up | 165.96 | 316.38 | 1063.35 | 28.37 | 32.61 | 62.30 | 31.56 | 37.90 | 78.94 |
| Roll | 0.247 | 2.021 | 6.144 | −0.089 | 3.475 | 11.262 | 0.077 | 2.430 | 8.920 |
| Pitch | −0.070 | 2.644 | 6.298 | −0.573 | 3.763 | 10.065 | −0.040 | 3.570 | 9.032 |
| Yaw | 0.928 | 1.068 | 4.015 | −2.987 | 12.188 | 66.465 | 0.423 | 1.337 | 3.942 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 15.94 | 21.86 | 50.58 | −0.85 | 1.28 | 2.45 | −0.85 | 1.28 | 2.45 |
| North | −67.85 | 100.41 | 252.75 | 1.71 | 2.11 | 4.20 | 1.71 | 2.11 | 4.20 |
| Horizontal | 69.90 | 102.77 | 257.77 | 2.28 | 2.46 | 4.21 | 2.28 | 2.46 | 4.21 |
| Up | 4.60 | 5.94 | 10.51 | 1.09 | 1.28 | 2.54 | 0.88 | 1.23 | 3.04 |
| Roll | −0.387 | 0.464 | 0.743 | −0.987 | 1.127 | 1.929 | −0.400 | 0.480 | 0.767 |
| Pitch | 0.198 | 0.507 | 0.795 | −0.580 | 0.916 | 1.892 | 0.186 | 0.494 | 0.770 |
| Yaw | 0.194 | 0.220 | 0.444 | 0.024 | 0.386 | 1.050 | 0.193 | 0.217 | 0.446 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −8.03 | 10.37 | 21.34 | −6.28 | 7.47 | 12.20 | −6.28 | 7.47 | 12.20 |
| North | 11.53 | 17.57 | 44.76 | 5.28 | 6.28 | 10.13 | 5.28 | 6.28 | 10.13 |
| Horizontal | 14.41 | 20.40 | 49.59 | 8.29 | 9.76 | 15.85 | 8.29 | 9.76 | 15.85 |
| Up | 6.15 | 7.61 | 14.47 | 1.69 | 2.11 | 4.17 | 3.24 | 3.60 | 4.73 |
| Roll | −0.361 | 0.392 | 0.615 | 1.045 | 1.337 | 2.870 | −0.360 | 0.391 | 0.614 |
| Pitch | −0.254 | 0.306 | 0.493 | −0.998 | 1.175 | 2.153 | −0.245 | 0.295 | 0.491 |
| Yaw | −0.077 | 0.106 | 0.310 | 2.898 | 2.937 | 3.481 | −0.077 | 0.107 | 0.310 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −0.77 | 0.99 | 2.14 | −0.26 | 0.44 | 0.88 | −0.26 | 0.44 | 0.88 |
| North | 0.32 | 0.42 | 1.11 | −0.30 | 0.39 | 0.69 | −0.30 | 0.39 | 0.69 |
| Horizontal | 0.84 | 1.08 | 2.41 | 0.57 | 0.59 | 0.91 | 0.56 | 0.58 | 0.91 |
| Up | 0.39 | 0.48 | 1.00 | 1.34 | 1.35 | 1.62 | 0.34 | 0.41 | 0.78 |
| Roll | 0.037 | 0.068 | 0.186 | −0.182 | 0.441 | 1.061 | 0.037 | 0.068 | 0.186 |
| Pitch | −0.034 | 0.062 | 0.104 | 0.074 | 0.298 | 0.614 | −0.034 | 0.062 | 0.103 |
| Yaw | −0.107 | 0.153 | 0.316 | −0.776 | 0.990 | 1.858 | −0.108 | 0.154 | 0.316 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −125.23 | 212.27 | 618.43 | 0.26 | 0.50 | 1.35 | 0.26 | 0.50 | 1.35 |
| North | 9.36 | 18.80 | 57.37 | 1.63 | 1.90 | 3.07 | 1.63 | 1.90 | 3.07 |
| Horizontal | 126.06 | 213.10 | 621.09 | 1.70 | 1.97 | 3.27 | 1.70 | 1.97 | 3.27 |
| Up | 11.66 | 19.69 | 55.26 | 3.79 | 4.60 | 10.40 | 5.91 | 8.07 | 16.39 |
| Roll | −0.603 | 1.168 | 2.447 | −0.373 | 0.497 | 1.634 | −0.387 | 0.873 | 1.930 |
| Pitch | 2.201 | 2.828 | 4.468 | −1.376 | 1.750 | 3.034 | 2.258 | 2.905 | 4.519 |
| Yaw | 0.227 | 0.328 | 0.676 | −0.271 | 0.502 | 1.441 | 0.227 | 0.331 | 0.676 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −4.70 | 5.72 | 13.46 | −7.50 | 9.62 | 19.22 | −7.50 | 9.62 | 19.22 |
| North | −26.14 | 38.60 | 94.03 | 8.64 | 10.43 | 16.53 | 8.64 | 10.43 | 16.53 |
| Horizontal | 26.77 | 39.02 | 94.99 | 11.66 | 14.19 | 24.06 | 11.66 | 14.19 | 24.06 |
| Up | 1.16 | 1.37 | 2.42 | 1.65 | 2.08 | 6.14 | 1.43 | 1.69 | 4.15 |
| Roll | 0.152 | 0.358 | 0.817 | −1.510 | 2.038 | 3.508 | 0.160 | 0.352 | 0.815 |
| Pitch | 0.226 | 0.270 | 0.535 | −1.667 | 2.143 | 4.440 | 0.214 | 0.256 | 0.503 |
| Yaw | −0.021 | 0.101 | 0.306 | 3.245 | 3.288 | 4.696 | −0.023 | 0.100 | 0.293 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 0.60 | 0.68 | 1.19 | 0.32 | 0.33 | 0.43 | 0.32 | 0.33 | 0.43 |
| North | 0.49 | 0.58 | 1.12 | 0.16 | 0.20 | 0.30 | 0.16 | 0.20 | 0.30 |
| Horizontal | 0.78 | 0.89 | 1.63 | 0.38 | 0.39 | 0.51 | 0.37 | 0.39 | 0.51 |
| Up | 0.12 | 0.16 | 0.31 | 1.90 | 1.92 | 2.15 | 0.14 | 0.17 | 0.32 |
| Roll | −0.063 | 0.103 | 0.171 | 0.968 | 1.005 | 1.865 | −0.063 | 0.103 | 0.172 |
| Pitch | −0.044 | 0.071 | 0.118 | −0.056 | 0.165 | 0.491 | −0.044 | 0.071 | 0.118 |
| Yaw | −0.005 | 0.051 | 0.113 | −0.238 | 0.440 | 0.810 | −0.005 | 0.051 | 0.113 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 23.17 | 32.12 | 66.08 | 3.23 | 4.02 | 8.01 | 3.23 | 4.02 | 8.01 |
| North | −43.10 | 63.11 | 141.80 | −1.75 | 2.02 | 3.18 | −1.75 | 2.02 | 3.18 |
| Horizontal | 49.42 | 70.81 | 156.44 | 3.79 | 4.50 | 8.11 | 3.79 | 4.50 | 8.11 |
| Up | 7.05 | 9.22 | 19.31 | 0.45 | 0.53 | 0.94 | 1.30 | 1.45 | 2.42 |
| Roll | −0.257 | 0.421 | 0.907 | 1.186 | 1.689 | 3.914 | −0.253 | 0.425 | 0.913 |
| Pitch | −0.125 | 0.211 | 0.385 | 0.209 | 1.514 | 4.972 | −0.150 | 0.231 | 0.437 |
| Yaw | 0.685 | 0.717 | 1.623 | 1.351 | 1.432 | 2.613 | 0.682 | 0.713 | 1.604 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 14.96 | 30.21 | 93.41 | −0.37 | 0.61 | 1.78 | −0.37 | 0.61 | 1.78 |
| North | −22.19 | 32.94 | 92.80 | −0.78 | 1.16 | 2.63 | −0.78 | 1.16 | 2.62 |
| Horizontal | 28.67 | 44.70 | 131.67 | 1.09 | 1.31 | 2.68 | 1.09 | 1.31 | 2.67 |
| Up | 4.56 | 6.68 | 16.36 | 1.30 | 1.57 | 3.47 | 1.99 | 2.42 | 4.32 |
| Roll | 0.491 | 0.672 | 1.449 | −3.105 | 3.711 | 5.740 | 0.453 | 0.616 | 1.328 |
| Pitch | 0.094 | 0.283 | 0.843 | −0.591 | 1.050 | 3.277 | 0.063 | 0.239 | 0.689 |
| Yaw | −0.063 | 0.560 | 1.137 | 0.638 | 0.855 | 1.616 | −0.061 | 0.557 | 1.122 |
Appendix A.2. Highway Datasets
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 2.388 | 3.190 | 7.487 | 5.890 | 6.397 | 8.745 | 5.894 | 6.405 | 8.757 |
| North | −5.394 | 7.385 | 16.745 | −5.845 | 6.496 | 9.873 | −5.849 | 6.507 | 9.895 |
| Horizontal | 5.908 | 8.045 | 18.343 | 8.317 | 9.117 | 13.184 | 8.320 | 9.130 | 13.209 |
| Up | 0.321 | 0.344 | 0.481 | 2.894 | 3.068 | 4.575 | 0.327 | 0.350 | 0.484 |
| Roll | 0.142 | 0.149 | 0.225 | 0.096 | 0.410 | 0.919 | 0.142 | 0.149 | 0.225 |
| Pitch | 0.065 | 0.069 | 0.120 | −0.743 | 0.834 | 1.220 | 0.065 | 0.069 | 0.120 |
| Yaw | 0.076 | 0.099 | 0.169 | −3.196 | 3.203 | 3.409 | 0.076 | 0.099 | 0.169 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 1.97 | 2.56 | 5.53 | −0.94 | 0.95 | 1.29 | −0.91 | 0.94 | 1.51 |
| North | 3.29 | 4.45 | 10.38 | −0.86 | 0.88 | 1.31 | −0.84 | 0.87 | 1.48 |
| Horizontal | 3.84 | 5.14 | 11.77 | 1.28 | 1.30 | 1.84 | 1.24 | 1.28 | 2.12 |
| Up | 0.48 | 0.60 | 1.30 | 3.53 | 3.94 | 7.99 | 0.48 | 0.60 | 1.31 |
| Roll | 0.008 | 0.027 | 0.065 | 1.165 | 1.169 | 1.394 | 0.008 | 0.027 | 0.065 |
| Pitch | −0.184 | 0.203 | 0.400 | −0.745 | 0.899 | 1.764 | −0.184 | 0.203 | 0.400 |
| Yaw | 0.053 | 0.071 | 0.176 | −0.372 | 0.392 | 0.635 | 0.053 | 0.071 | 0.176 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −0.61 | 0.81 | 1.37 | −1.34 | 1.61 | 2.86 | −1.34 | 1.61 | 2.86 |
| North | 2.45 | 3.34 | 7.00 | −1.08 | 1.13 | 1.69 | −1.07 | 1.12 | 1.64 |
| Horizontal | 2.55 | 3.43 | 7.13 | 1.77 | 1.97 | 3.32 | 1.76 | 1.97 | 3.30 |
| Up | 1.58 | 1.90 | 3.33 | 2.89 | 4.14 | 9.92 | 1.58 | 1.90 | 3.33 |
| Roll | −0.014 | 0.050 | 0.139 | −1.496 | 1.811 | 3.116 | −0.014 | 0.050 | 0.139 |
| Pitch | −0.072 | 0.119 | 0.220 | −1.261 | 1.492 | 2.709 | −0.072 | 0.119 | 0.220 |
| Yaw | 0.025 | 0.042 | 0.111 | 0.187 | 0.203 | 0.384 | 0.025 | 0.042 | 0.111 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −2.72 | 3.63 | 7.94 | 4.86 | 4.97 | 7.24 | 4.81 | 4.97 | 8.74 |
| North | −6.63 | 9.31 | 23.20 | −6.86 | 6.98 | 8.22 | −6.84 | 7.00 | 8.06 |
| Horizontal | 7.17 | 10.00 | 24.52 | 8.54 | 8.57 | 9.19 | 8.50 | 8.58 | 10.05 |
| Up | 1.31 | 1.54 | 2.78 | 7.72 | 9.92 | 22.09 | 1.32 | 1.56 | 2.82 |
| Roll | −0.135 | 0.146 | 0.238 | −0.595 | 1.144 | 2.061 | −0.135 | 0.146 | 0.238 |
| Pitch | 0.118 | 0.150 | 0.370 | −1.883 | 2.207 | 3.835 | 0.118 | 0.150 | 0.370 |
| Yaw | 0.294 | 0.317 | 0.450 | −0.032 | 0.516 | 1.059 | 0.294 | 0.317 | 0.450 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −4.71 | 6.59 | 13.50 | −0.70 | 0.83 | 1.36 | −0.70 | 0.84 | 1.37 |
| North | 18.41 | 25.28 | 58.60 | 0.12 | 0.44 | 0.79 | 0.14 | 0.46 | 0.80 |
| Horizontal | 19.04 | 26.12 | 60.13 | 0.82 | 0.94 | 1.51 | 0.83 | 0.96 | 1.53 |
| Up | 3.28 | 3.73 | 5.54 | 4.43 | 4.61 | 5.85 | 3.28 | 3.73 | 5.52 |
| Roll | 0.184 | 0.322 | 0.658 | 0.610 | 0.687 | 1.245 | 0.184 | 0.322 | 0.658 |
| Pitch | −0.158 | 0.281 | 0.378 | −0.243 | 0.806 | 1.250 | −0.158 | 0.281 | 0.378 |
| Yaw | −0.084 | 0.307 | 1.660 | −0.934 | 1.329 | 3.620 | −0.084 | 0.306 | 1.660 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 2.31 | 2.87 | 5.45 | 0.73 | 0.77 | 1.06 | 0.74 | 0.77 | 1.05 |
| North | 1.18 | 1.39 | 2.36 | 0.41 | 0.85 | 2.18 | 0.41 | 0.84 | 2.13 |
| Horizontal | 2.63 | 3.19 | 5.75 | 1.04 | 1.15 | 2.25 | 1.04 | 1.14 | 2.20 |
| Up | 2.45 | 3.36 | 7.56 | 8.70 | 10.46 | 21.40 | 2.45 | 3.36 | 7.56 |
| Roll | −0.019 | 0.072 | 0.196 | 0.760 | 0.767 | 1.042 | −0.019 | 0.072 | 0.196 |
| Pitch | −0.038 | 0.077 | 0.194 | −1.411 | 1.634 | 2.996 | −0.038 | 0.077 | 0.194 |
| Yaw | 0.023 | 0.050 | 0.093 | −0.409 | 0.492 | 0.863 | 0.023 | 0.050 | 0.093 |
References
- De Ponte Müller, F.J.S. Survey on ranging sensors and cooperative techniques for relative positioning of vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martínez-Díaz, M.; Soriguera, F. Autonomous vehicles: Theoretical and practical challenges. Transp. Res. Procedia 2018, 33, 275–282. [Google Scholar] [CrossRef]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 314, pp. 1–18. [Google Scholar]
- Wang, G.; Han, Y.; Chen, J.; Wang, S.; Zhang, Z.; Du, N.; Zheng, Y. A GNSS/INS integrated navigation algorithm based on Kalman filter. IFAC-Paper 2018, 51, 232–237. [Google Scholar] [CrossRef]
- Elmezayen, A.; El-Rabbany, A. Performance evaluation of real-time tightly-coupled GNSS PPP/MEMS-based inertial integration using an improved robust adaptive Kalman filter. J. Appl. Geod. 2020, 14, 413–430. [Google Scholar] [CrossRef]
- Elmezayen, A.; El-Rabbany, A. Ultra-Low-Cost Tightly Coupled Triple-Constellation GNSS PPP/MEMS-Based INS Integration for Land Vehicular Applications. Geomatics 2021, 1, 258–286. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman Filter with Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Abd Rabbou, M.; El-Rabbany, A. Tightly coupled integration of GPS precise point positioning and MEMS-based inertial systems. GPS Solut. 2015, 19, 601–609. [Google Scholar] [CrossRef]
- Ben-Ari, M.; Mondada, F. Elements of Robotics; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceeding of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- KITTI. 2013. Available online: http://www.cvlibs.net/datasets/kitti/eval_odometry.php (accessed on 10 October 2021).
- LOAM. 2018. Available online: https://github.com/HKUST-Aerial-Robotics/A-LOAM (accessed on 10 October 2021).
- Shan, T.; Englot, B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceeding of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- KITWARE. 2020. Available online: https://gitlab.kitware.com/keu-computervision/slam (accessed on 1 May 2020).
- Oelsch, M.; Karimi, M.; Steinbach, E. R-LOAM: Improving LiDAR Odometry and Mapping With Point-to-Mesh Features of a Known 3D Reference Object. IEEE Robot. Autom. Lett. 2021, 6, 2068–2075. [Google Scholar] [CrossRef]
- Wang, H.; Wang, C.; Chen, C.L.; Xie, L. F-loam: Fast lidar odometry and mapping. In Proceeding of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) IEEE, Prague, Crech Republic, 27 September–1 October 2021; pp. 4390–4396. [Google Scholar]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. [Google Scholar] [CrossRef] [PubMed]
- Aboutaleb, A.; El-Wakeel, A.S.; Elghamrawy, H.; Noureldin, A. Lidar/riss/gnss dynamic integration for land vehicle robust positioning in challenging gnss environments. Remote Sens. 2020, 12, 2323. [Google Scholar] [CrossRef]
- Das, S.; Kumari, R.; Kumar, S.D. A Review on Applications of Simultaneous Localization and Mapping Method in Autonomous Vehicles. In Advances in Interdisciplinary Engineering; Springer: Singapore, 2021; pp. 367–375. [Google Scholar]
- Abd Rabbou, M.; El-Rabbany, A. Precise point positioning using multi-constellation GNSS observations for kinematic applications. J. Appl. Geod. 2015, 9, 15–26. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR integrated navigation system for urban and indoor environments using hybrid scan matching algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- El-Rabbany, A. Introduction to GPS: The Global Positioning System; Artech House: London, UK, 2002. [Google Scholar]
- LOAM. 2020. Available online: https://github.com/Mitchell-Lee-93/kitti-A-LOAM (accessed on 25 May 2022).
- LeGO-LOAM. 2020. Available online: https://github.com/Mitchell-Lee-93/kitti-lego-loam (accessed on 25 May 2022).
- F-LOAM. 2021. Available online: https://github.com/wh200720041/floam (accessed on 25 May 2022).











| Drive Label | Drive Number | Length (m) | Time (s) | Average Speed (km/h) | No. of Frames |
|---|---|---|---|---|---|
| Residential datasets | |||||
| D-18 | 2011_09_30_drive_0018_sync | 2206.47 | 287.53 | 27.63 | 2761 |
| D-19 | 2011_09_26_drive_0019_sync | 406.48 | 49.61 | 29.50 | 480 |
| D-20 | 2011_09_30_drive_0020_sync | 1233.74 | 114.49 | 38.79 | 1104 |
| D-22 | 2011_09_26_drive_0022_sync | 515.17 | 82.67 | 22.43 | 799 |
| D-23 | 2011_09_26_drive_0023_sync | 413.99 | 48.91 | 30.47 | 473 |
| D-27 | 2011_09_30_drive_0027_sync | 692.47 | 114.85 | 21.71 | 1106 |
| D-27-d | 2011_10_03_drive_0027_sync | 3669.18 | 465.97 | 28.35 | 4497 |
| D-28 | 2011_09_30_drive_0028_sync | 4208.65 | 537.78 | 28.17 | 5177 |
| D-33 | 2011_09_30_drive_0033_sync | 1709.57 | 165.31 | 37.23 | 1594 |
| D-34 | 2011_09_30_drive_0034_sync | 920.52 | 126.88 | 26.12 | 1224 |
| D-34-d | 2011_10_03_drive_0034_sync | 5043.67 | 481.31 | 37.72 | 4642 |
| D-36 | 2011_09_26_drive_0036_sync | 715.57 | 82.68 | 31.16 | 802 |
| D-39 | 2011_09_26_drive_0039_sync | 297.78 | 40.57 | 26.42 | 394 |
| D-46 | 2011_09_26_drive_0046_sync | 47.56 | 12.81 | 13.37 | 125 |
| D-61 | 2011_09_26_drive_0061_sync | 494.02 | 72.61 | 24.49 | 703 |
| D-64 | 2011_09_26_drive_0064_sync | 437.89 | 58.74 | 26.84 | 569 |
| D-79 | 2011_09_26_drive_0079_sync | 26.27 | 10.24 | 9.23 | 100 |
| D-86 | 2011_09_26_drive_0086_sync | 268.72 | 72.84 | 13.28 | 705 |
| D-87 | 2011_09_26_drive_0087_sync | 286.79 | 75.27 | 13.72 | 728 |
| Highway datasets | |||||
| D-04 | 2011_09_29_drive_0004_sync | 255.05 | 35.15 | 26.13 | 339 |
| D-15 | 2011_09_26_drive_0015_sync | 362.81 | 30.65 | 42.61 | 297 |
| D-16 | 2011_09_30_drive_0016_sync | 404.71 | 28.84 | 50.52 | 278 |
| D-28 | 2011_09_26_drive_0028_sync | 779.50 | 44.43 | 63.16 | 430 |
| D-29 | 2011_09_26_drive_0029_sync | 351.24 | 44.46 | 28.44 | 430 |
| D-32 | 2011_09_26_drive_0032_sync | 578.30 | 40.31 | 51.64 | 390 |
| D-42 | 2011_10_03_drive_0042_sync | 2591.80 | 121.19 | 76.99 | 1170 |
| D-101 | 2011_09_26_drive_0101_sync | 1299.13 | 96.62 | 48.40 | 936 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −30.38 | 44.27 | 122.57 | −0.88 | 3.34 | 5.84 | −0.88 | 3.34 | 5.84 |
| North | −88.24 | 136.01 | 353.70 | −0.22 | 3.12 | 6.71 | −0.22 | 3.12 | 6.71 |
| Horizontal | 94.16 | 143.03 | 374.34 | 4.22 | 4.57 | 7.19 | 4.22 | 4.57 | 7.19 |
| Up | 7.80 | 10.62 | 22.85 | 2.31 | 2.55 | 4.57 | 2.57 | 2.95 | 4.78 |
| Roll | 0.012 | 0.444 | 0.838 | 0.504 | 1.276 | 3.084 | 0.022 | 0.441 | 0.852 |
| Pitch | −0.076 | 0.332 | 0.885 | −0.098 | 0.989 | 2.123 | −0.073 | 0.330 | 0.881 |
| Yaw | 0.280 | 0.337 | 0.863 | 1.233 | 1.555 | 3.027 | 0.262 | 0.322 | 0.868 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −7196.25 | 10,042.85 | 23,518.43 | −9.94 | 13.57 | 29.68 | −9.94 | 13.57 | 29.68 |
| North | −6188.34 | 8316.52 | 17,618.60 | −2.29 | 6.53 | 20.69 | −2.29 | 6.53 | 20.70 |
| Horizontal | 9500.92 | 13,039.30 | 29,385.90 | 12.09 | 15.06 | 31.86 | 12.09 | 15.06 | 31.86 |
| Up | 252.12 | 367.13 | 893.97 | 9.99 | 12.46 | 60.66 | 10.61 | 13.57 | 62.23 |
| Roll | 0.111 | 0.956 | 1.926 | 0.085 | 1.675 | 4.495 | 0.167 | 1.036 | 1.968 |
| Pitch | 0.171 | 0.937 | 2.032 | 0.020 | 1.647 | 4.326 | 0.157 | 1.025 | 2.304 |
| Yaw | 0.802 | 0.963 | 2.213 | −1.556 | 2.146 | 5.159 | 1.247 | 1.670 | 4.797 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | 0.07 | 3.06 | 5.48 | 9.93 | 11.43 | 20.46 | 9.93 | 11.44 | 20.42 |
| North | −40.20 | 60.39 | 152.14 | −8.23 | 9.40 | 14.95 | −8.24 | 9.42 | 14.95 |
| Horizontal | 40.42 | 60.46 | 152.22 | 13.07 | 14.80 | 25.10 | 13.08 | 14.82 | 25.03 |
| Up | 4.89 | 6.06 | 11.72 | 25.00 | 36.65 | 87.50 | 4.86 | 6.03 | 11.66 |
| Roll | −0.234 | 0.273 | 0.567 | 0.733 | 0.998 | 5.318 | −0.234 | 0.273 | 0.568 |
| Pitch | 0.057 | 0.145 | 0.558 | −2.995 | 4.092 | 7.882 | 0.057 | 0.145 | 0.558 |
| Yaw | 0.375 | 0.444 | 0.911 | −0.238 | 0.368 | 0.965 | 0.375 | 0.444 | 0.911 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −155.14 | 232.32 | 600.40 | 11.88 | 18.67 | 35.49 | 11.85 | 18.65 | 35.49 |
| North | 25.46 | 31.75 | 50.88 | −23.10 | 26.17 | 34.33 | −23.11 | 26.19 | 34.36 |
| Horizontal | 160.79 | 234.48 | 600.52 | 27.86 | 32.15 | 48.39 | 27.86 | 32.15 | 48.40 |
| Up | 19.48 | 24.09 | 47.33 | 130.98 | 167.81 | 285.49 | 19.15 | 23.58 | 45.66 |
| Roll | −0.167 | 0.569 | 1.421 | −0.045 | 6.294 | 16.392 | −0.166 | 0.569 | 1.420 |
| Pitch | −0.314 | 0.613 | 1.210 | −5.189 | 9.368 | 16.017 | −0.315 | 0.613 | 1.209 |
| Yaw | 0.172 | 0.355 | 0.903 | −0.345 | 1.221 | 2.483 | 0.170 | 0.352 | 0.897 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −687.00 | 1423.76 | 4839.25 | −0.25 | 3.64 | 18.39 | −0.25 | 3.64 | 18.39 |
| North | −194.20 | 1710.08 | 4720.22 | 0.23 | 3.36 | 20.69 | 0.23 | 3.36 | 20.70 |
| Horizontal | 1504.87 | 2225.19 | 6760.09 | 3.83 | 4.96 | 27.69 | 3.83 | 4.96 | 27.69 |
| Up | −12.51 | 37.62 | 149.04 | −10.36 | 14.40 | 60.66 | −10.80 | 15.50 | 62.23 |
| Roll | −0.027 | 0.794 | 1.926 | 0.268 | 2.115 | 5.540 | 0.019 | 0.752 | 1.667 |
| Pitch | 0.105 | 0.734 | 1.787 | 0.094 | 1.888 | 5.390 | 0.098 | 0.755 | 1.625 |
| Yaw | 0.732 | 0.891 | 2.213 | −0.497 | 1.079 | 3.780 | 0.725 | 0.922 | 2.297 |
| INS | LiDAR | INS/LiDAR | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Max | Mean | RMSE | Max | Mean | RMSE | Max | |
| East | −20.83 | 33.76 | 92.36 | 1.01 | 4.27 | 8.43 | 0.99 | 4.30 | 8.29 |
| North | −3.93 | 25.72 | 79.29 | −6.41 | 12.47 | 32.36 | −6.41 | 12.47 | 32.31 |
| Horizontal | 28.63 | 42.44 | 121.73 | 8.97 | 13.18 | 33.44 | 8.97 | 13.19 | 33.35 |
| Up | −3.42 | 6.49 | 18.70 | −29.74 | 39.60 | 113.50 | −3.40 | 6.48 | 18.60 |
| Roll | −0.102 | 0.340 | 0.878 | −0.340 | 2.290 | 6.046 | −0.102 | 0.340 | 0.878 |
| Pitch | −0.217 | 0.410 | 0.817 | −3.056 | 4.817 | 10.521 | −0.217 | 0.410 | 0.818 |
| Yaw | 0.139 | 0.313 | 0.822 | 0.043 | 0.799 | 1.891 | 0.139 | 0.313 | 0.821 |
| Proposed System | A-LOAM | LeGO-LOAM | F-LOAM | |||||
|---|---|---|---|---|---|---|---|---|
| Mean | RMSE | Mean | RMSE | Mean | RMSE | Mean | RMSE | |
| D-28 | ||||||||
| Horizontal | 12.09 | 15.06 | 26.81 | 34.77 | 15.78 | 17.84 | 27.46 | 31.27 |
| Up | 10.61 | 13.57 | 10.94 | 13.34 | 16.72 | 18.92 | 7.99 | 11.00 |
| D-42 | ||||||||
| Horizontal | 27.86 | 32.15 | 167.42 | 201.33 | 575.94 | 715.11 | 67.55 | 87.35 |
| Up | 19.15 | 23.58 | 79.76 | 104.23 | 55.66 | 70.25 | 25.29 | 37.36 |
| D-101 | ||||||||
| Horizontal | 13.08 | 14.82 | 16.05 | 22.27 | 24.19 | 32.52 | 7.66 | 9.09 |
| Up | 4.86 | 6.03 | 19.59 | 28.57 | 19.13 | 29.33 | 5.18 | 7.82 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdelaziz, N.; El-Rabbany, A. An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments. Sensors 2022, 22, 4327. https://doi.org/10.3390/s22124327
Abdelaziz N, El-Rabbany A. An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments. Sensors. 2022; 22(12):4327. https://doi.org/10.3390/s22124327
Chicago/Turabian StyleAbdelaziz, Nader, and Ahmed El-Rabbany. 2022. "An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments" Sensors 22, no. 12: 4327. https://doi.org/10.3390/s22124327
APA StyleAbdelaziz, N., & El-Rabbany, A. (2022). An Integrated INS/LiDAR SLAM Navigation System for GNSS-Challenging Environments. Sensors, 22(12), 4327. https://doi.org/10.3390/s22124327