
Nonlinear Predictive Motion Control for Autonomous Mobile Robots Considering Active Fault-Tolerant Control and Regenerative Braking




Abstract
:1. Introduction
2. Problem Description and Control Framework
2.1. Control Problem Description for AMR
2.2. Chassis Control Framework for AMR
3. Modelling
3.1. Vehicle Dynamic Model
3.2. Path-Tracking Model
4. Control Algorithm Design
4.1. Velocity-Tracking Control Algorithm
4.2. Path-Tracking Control Algorithm
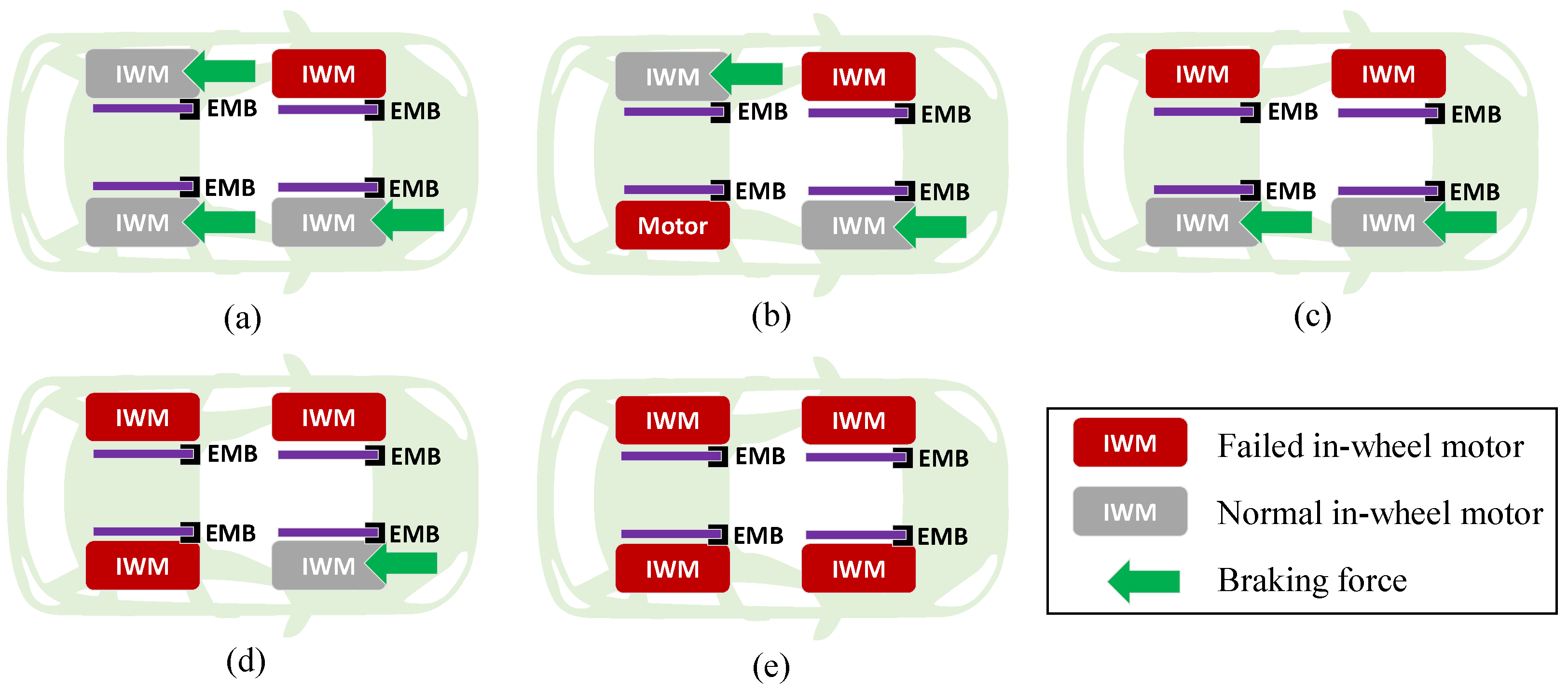
4.3. Active Fault-Tolerant Control Algorithm
5. Simulation Results and Analysis
5.1. Simulation Case 1
5.2. Simulation Case 2
5.3. Simulation Case 3
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Raharja, N.M.I.; Ma’arif, A.; Adiningrat, A.; Nurjanah, A.; Rijalusalam, D.U.; Sánchez-López, C. Empowerment of mosque community with ultraviolet light sterilisator robot. J. Pengabdi. Dan Pemberdaya. Masy. Indones. 2021, 1, 95–102. [Google Scholar]
- Ni, J.; Hu, J.; Xiang, C. An AWID and AWIS X-by-wire UGV: Design and hierarchical chassis dynamics control. IEEE Trans. Intell. Transp. Syst. 2018, 20, 654–666. [Google Scholar] [CrossRef]
- De Ryck, M.; Versteyhe, M.; Debrouwere, F. Automated guided vehicle systems, state-of-the-art control algorithms and techniques. J. Manuf. Syst. 2020, 54, 152–173. [Google Scholar] [CrossRef]
- Le-Anh, T.; De Koster, M.B.M. A review of design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 171, 1–23. [Google Scholar] [CrossRef]
- Chen, T.; Babanin, A.; Muhammad, A.; Chapron, B.; Chen, C. Modified evolved bat algorithm of fuzzy optimal control for complex nonlinear systems. Rom. J. Inf. Sci. Technol. 2020, 23, T28–T40. [Google Scholar]
- Preitl, Z.; Precup, R.E.; Tar, J.K.; Takács, M. Use of multi-parametric quadratic programming in fuzzy control systems. Acta Polytech. Hung. 2006, 3, 29–43. [Google Scholar]
- Zamfirache, I.A.; Precup, R.E.; Roman, R.C.; Petriu, E.M. Policy Iteration Reinforcement Learning-based control using a Grey Wolf Optimizer algorithm. Inf. Sci. 2022, 585, 162–175. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Ullah, N. Neuroadaptive control of saturated nonlinear systems with disturbance compensation. ISA Trans. 2022, 122, 49–62. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonlinear Control, 2022; in press. [Google Scholar] [CrossRef]
- Witczak, M.; Majdzik, P.; Stetter, R.; Lipiec, B. A fault-tolerant control strategy for multiple automated guided vehicles. J. Manuf. Syst. 2020, 55, 56–68. [Google Scholar] [CrossRef]
- Zhang, S.; Zhuan, X. Research on Tracking Improvement for Electric Vehicle during a Car-following Process. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020. [Google Scholar]
- Li, M.; Xu, Y.; Lei, M.; Zhou, B. Velocity Tracking Control Based on Throttle-Pedal-Moving Data Mapping for the Autonomous Vehicle. IEEE Access 2019, 7, 176712–176718. [Google Scholar] [CrossRef]
- Xu, W.; Chen, H.; Wang, J.; Zhao, H. Velocity optimization for braking energy management of in-wheel motor electric vehicles. IEEE Access 2019, 7, 66410–66422. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Zhang, B.; Tang, T. Longitudinal velocity tracking control of a 4WID electric vehicle. IFAC-Pap. 2018, 51, 790–795. [Google Scholar] [CrossRef]
- Ivanov, V.; Savitski, D.; Shyrokau, B. A survey of traction control and antilock braking systems of full electric vehicles with individually controlled electric motors. IEEE Trans. Veh. Technol. 2014, 64, 3878–3896. [Google Scholar] [CrossRef]
- Chen, Q.; Kang, S.; Chen, H.; Liu, Y.; Bai, J. Acceleration slip regulation of distributed driving electric vehicle based on road identification. IEEE Access 2020, 8, 144585–144591. [Google Scholar] [CrossRef]
- Guo, L.; Xu, H.; Zou, J.; Jie, H.; Zheng, G. Variable gain control-based acceleration slip regulation control algorithm for four-wheel independent drive electric vehicle. Trans. Inst. Meas. Control 2021, 43, 902–914. [Google Scholar] [CrossRef]
- Peng, H.; Chen, X. Active Safety Control of X-by-Wire Electric Vehicles: A Survey. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 20. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M. Integrated controller design for path following in autonomous vehicles. SAE Tech. Pap. 2011, 10. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M.; Mahmoodi-Kaleybar, M. Integrated robust controller for vehicle path following. Multibody Syst. Dyn. 2015, 33, 207–228. [Google Scholar] [CrossRef]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative Decision Making of Connected Automated Vehicles at Multi-Lane Merging Zone: A Coalitional Game Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 3829–3841. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.; Hang, P.; Wang, S. Adaptive Coordinated Path Tracking Control Strategy for Autonomous Vehicles with Direct Yaw Moment Control. Chin. J. Mech. Eng. 2022, 35, 1–15. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, G.; Chen, X. Active safety control of automated electric vehicles at driving limits: A tube-based MPC approach. IEEE Trans. Transp. Electrif. 2022, 8, 1338–1349. [Google Scholar] [CrossRef]
- Zhao, Y.M.; Lin, Y.; Xi, F.; Guo, S. Calibration-based iterative learning control for path tracking of industrial robots. IEEE Trans. Ind. Electron. 2015, 62, 2921–2929. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Delta operator-based model predictive control with fault compensation for steer-by-wire systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 2257–2272. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Delta operator-based fault estimation and fault-tolerant model predictive control for steer-by-wire systems. IEEE Trans. Control Syst. Technol. 2017, 26, 1810–1817. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Sliding mode predictive tracking control for uncertain steer-by-wire system. Control Eng. Pract. 2019, 85, 194–205. [Google Scholar] [CrossRef]
- Wada, N.; Fujii, K.; Saeki, M. Reconfigurable fault-tolerant controller synthesis for a steer-by-wire vehicle using independently driven wheels. Veh. Syst. Dyn. 2013, 51, 1438–1465. [Google Scholar] [CrossRef]
- Wang, C.; Heng, B.; Zhao, W. Yaw and lateral stability control for four-wheel-independent steering and four-wheel-independent driving electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 409–422. [Google Scholar] [CrossRef]
- Yang, H.; Cocquempot, V.; Jiang, B. Optimal fault-tolerant path-tracking control for 4WS4WD electric vehicles. IEEE Trans. Intell. Transp. Syst. 2009, 11, 237–243. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S.; Wu, W.; Li, C.; Lu, J. Robust fault-tolerant control for four-wheel individually actuated electric vehicle considering driver steering characteristics. J. Frankl. Inst. 2021, 358, 5883–5908. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Fault tolerant sliding mode predictive control for uncertain steer-by-wire system. IEEE Trans. Cybern. 2019, 49, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Hao, L.Y.; Zhang, H.; Li, T.S.; Lin, B.; Chen, C.L.P. Fault tolerant control for dynamic positioning of unmanned marine vehicles based on TS fuzzy model with unknown membership functions. IEEE Trans. Veh. Technol. 2021, 70, 146–157. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Observer-based fault-tolerant controller for uncertain steer-by-wire systems using the delta operator. IEEE/ASME Trans. Mechatron. 2018, 23, 2587–2598. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators 2021, 10, 184. [Google Scholar] [CrossRef]
- Du, H.; Zhang, N.; Dong, G. Stabilizing vehicle lateral dynamics with considerations of parameter uncertainties and control saturation through robust yaw control. IEEE Trans. Veh. Technol. 2010, 59, 2593–2597. [Google Scholar]
- Ding, N.; Taheri, S. A modified Dugoff tire model for combined-slip forces. Tire Sci. Technol. 2010, 38, 228–244. [Google Scholar] [CrossRef]
- Huang, C.; Huang, H.; Hang, P.; Gao, H.; Wu, J.; Huang, Z.; Lv, C. Personalized trajectory planning and control of lane-change maneuvers for autonomous driving. IEEE Trans. Veh. Technol. 2021, 70, 5511–5523. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, X. Handling stability advancement with 4WS and DYC coordinated control: A gain-scheduled robust control approach. IEEE Trans. Veh. Technol. 2021, 70, 3164–3174. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Wang, W. Cooperative control framework for human driver and active rear steering system to advance active safety. IEEE Trans. Intell. Veh. 2021, 6, 460–469. [Google Scholar] [CrossRef]
- Ma, J.; Cheng, Z.; Zhang, X.; Tomizuka, M.; Lee, T.H. Alternating direction method of multipliers for constrained iterative LQR in autonomous driving. arXiv 2020, arXiv:2011.00462. [Google Scholar]
- Ma, J.; Cheng, Z.; Zhang, X.; Tomizuka, M.; Lee, T.H. Optimal decentralized control for uncertain systems by symmetric Gauss–Seidel semi-proximal ALM. IEEE Trans. Autom. Control 2021, 66, 5554–5560. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| (kg) | 431 | (m) | 0.829 |
| 0.28 | (m) | 0.705 | |
| (m2) | 0.97 | (m) | 1.534 |
| (kg/m3) | 1.2258 | (m) | 0.97 |
| 0.008 | (m2) | 0.67 | |
| (m2) | 217 | (m) | 0.298 |
| Regenerative Braking | Mechanical Braking | Hybrid Braking | |
|---|---|---|---|
| Braking distance (m) | 42.74 | 33.15 | 27.33 |
| Braking time (s) | 4.04 | 3.09 | 2.32 |
| Regenerative energy (J) | 0 |
| Normal | Failure | AFTC | |
|---|---|---|---|
| Regenerative energy (J) |
| Normal | Failure | AFTC | |
|---|---|---|---|
| Regenerative energy (J) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hang, P.; Lou, B.; Lv, C. Nonlinear Predictive Motion Control for Autonomous Mobile Robots Considering Active Fault-Tolerant Control and Regenerative Braking. Sensors 2022, 22, 3939. https://doi.org/10.3390/s22103939
Hang P, Lou B, Lv C. Nonlinear Predictive Motion Control for Autonomous Mobile Robots Considering Active Fault-Tolerant Control and Regenerative Braking. Sensors. 2022; 22(10):3939. https://doi.org/10.3390/s22103939
Chicago/Turabian StyleHang, Peng, Baichuan Lou, and Chen Lv. 2022. "Nonlinear Predictive Motion Control for Autonomous Mobile Robots Considering Active Fault-Tolerant Control and Regenerative Braking" Sensors 22, no. 10: 3939. https://doi.org/10.3390/s22103939
APA StyleHang, P., Lou, B., & Lv, C. (2022). Nonlinear Predictive Motion Control for Autonomous Mobile Robots Considering Active Fault-Tolerant Control and Regenerative Braking. Sensors, 22(10), 3939. https://doi.org/10.3390/s22103939