
Comparison of the Design of 3-Pole BLDC Actuators/Motors with a Rotor Based on a Single Permanent Magnet



Abstract
:1. Introduction
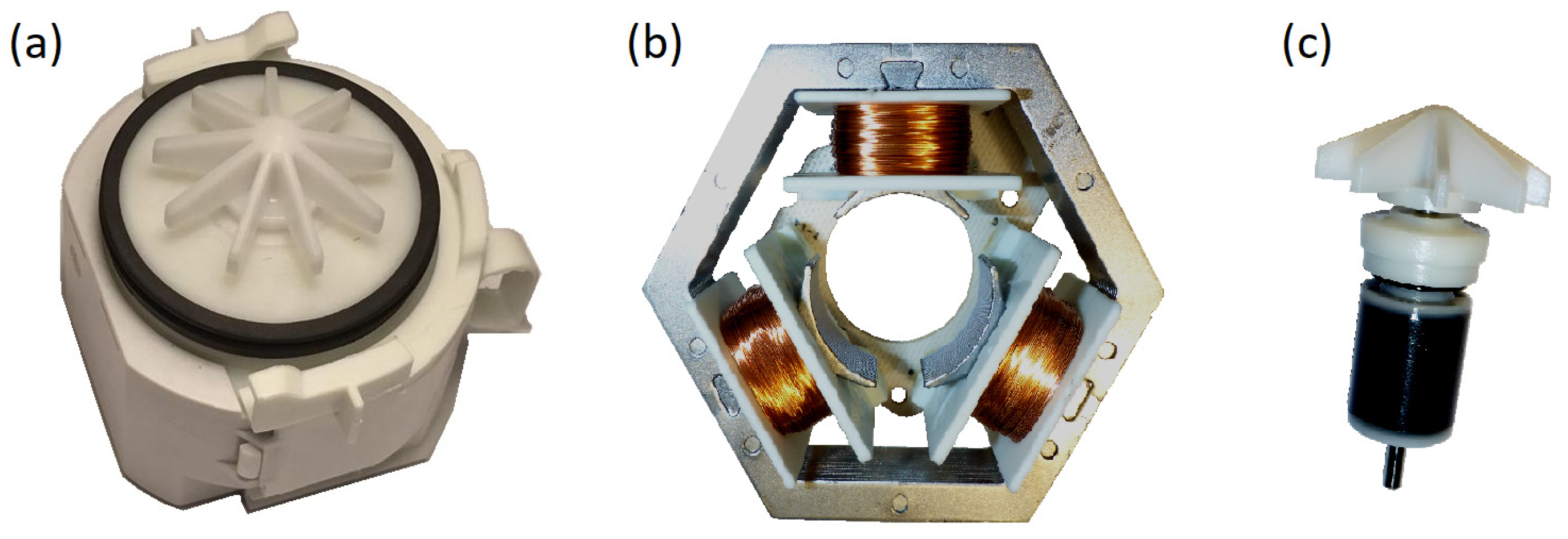
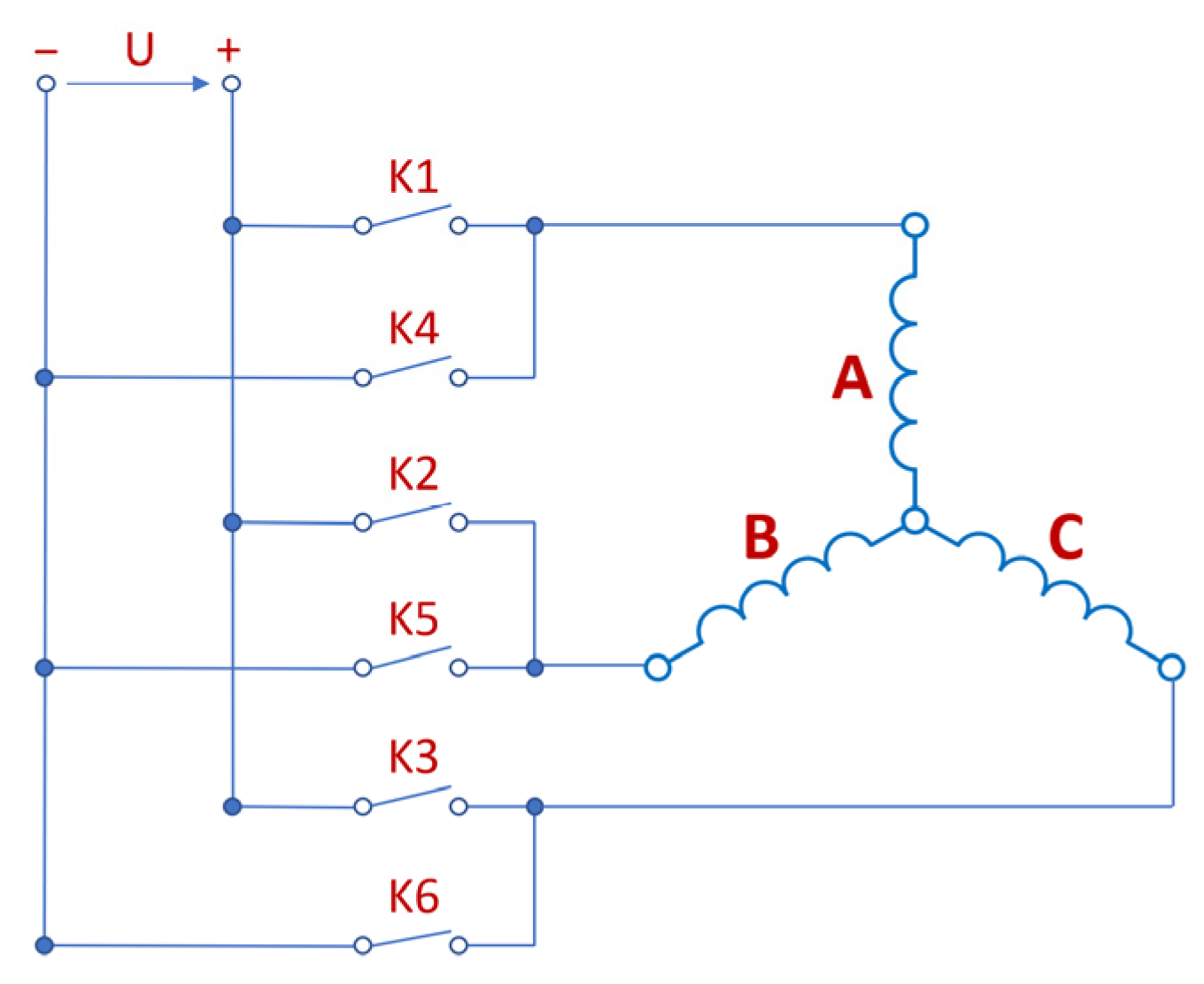
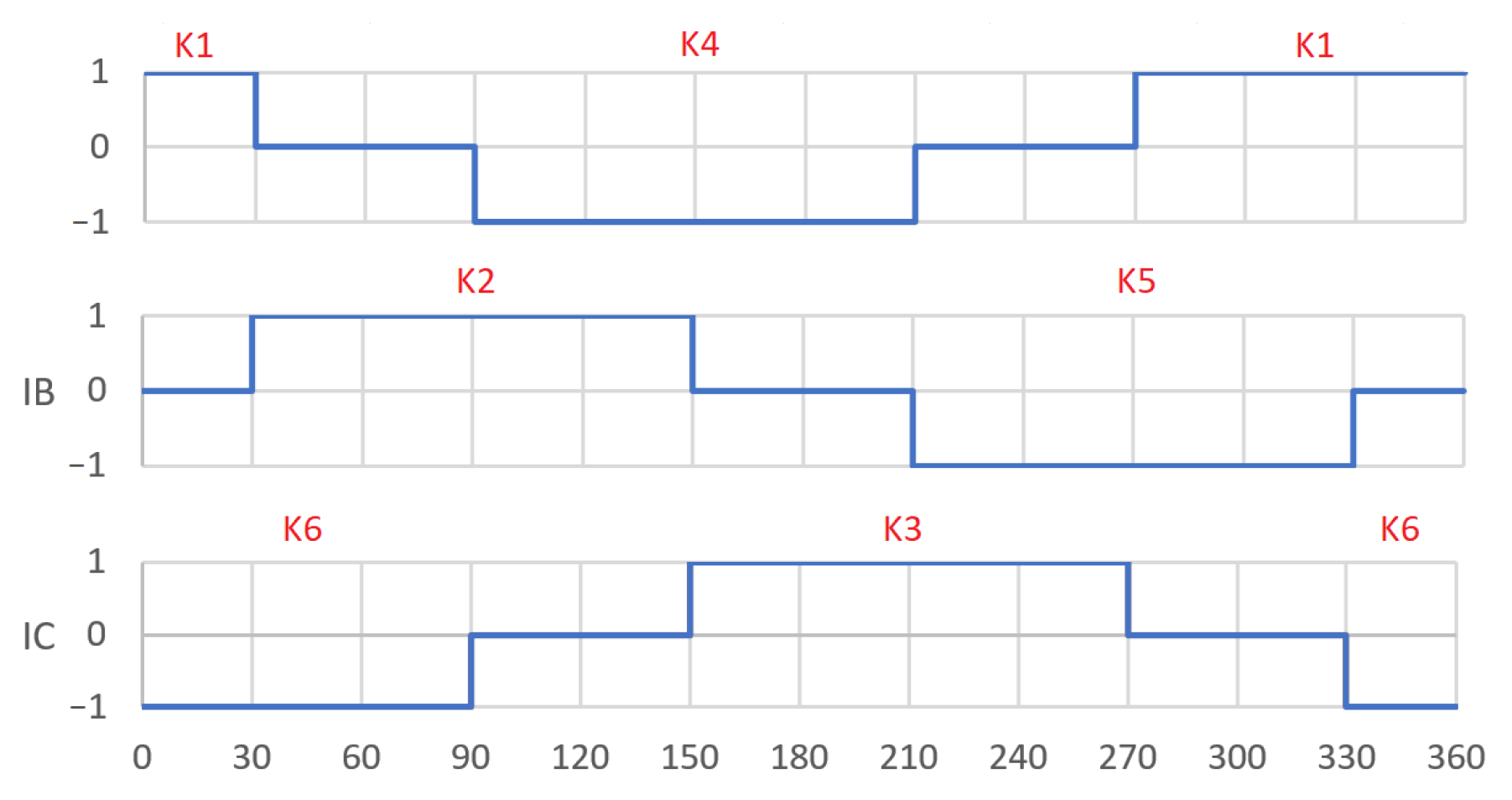
2. BLDC Actuators/Motors
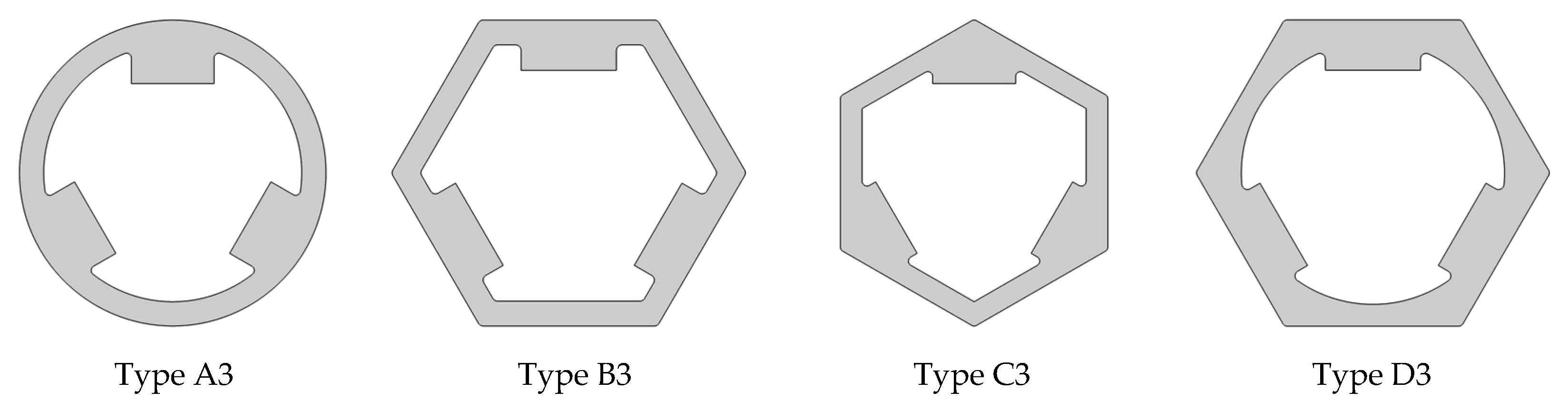
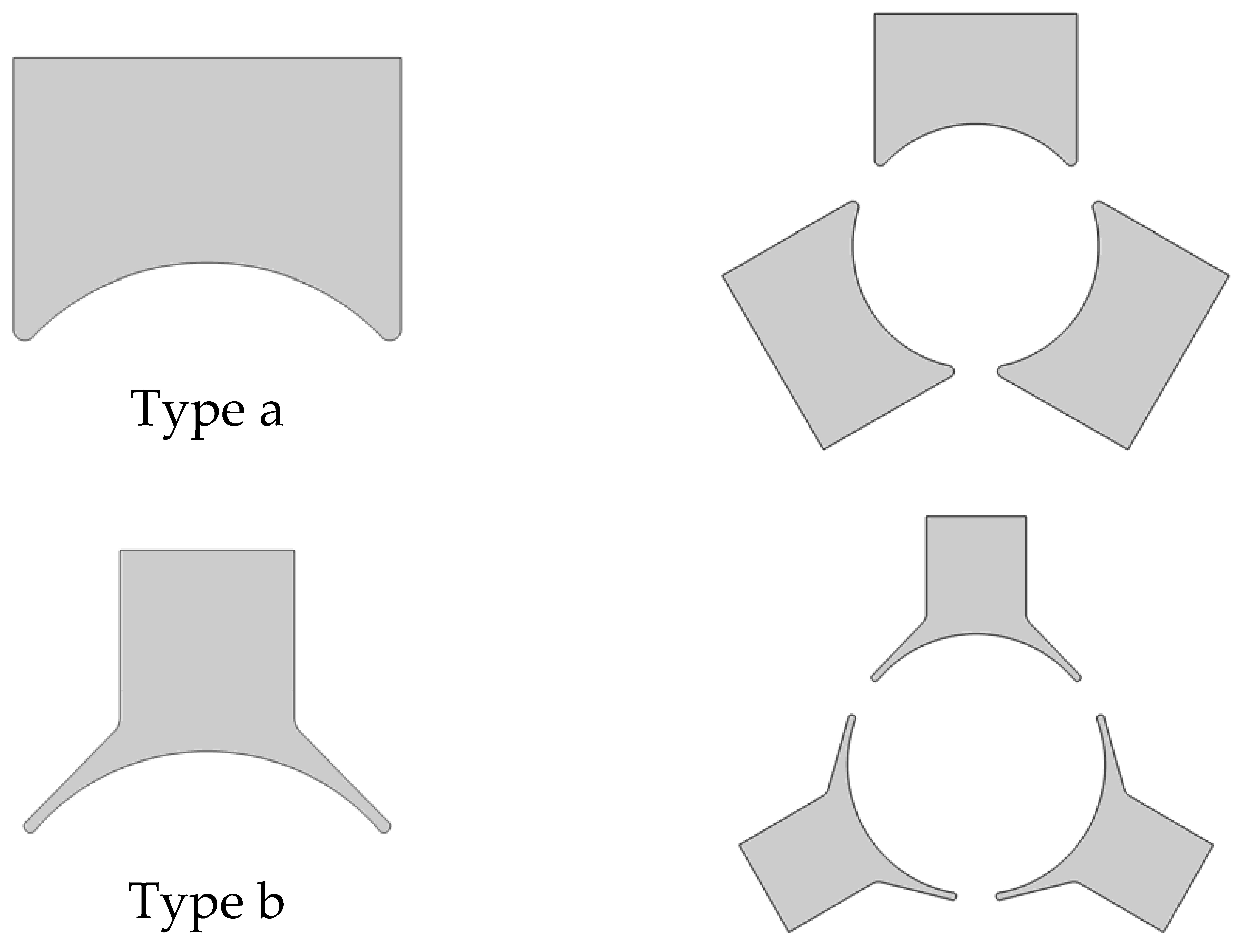
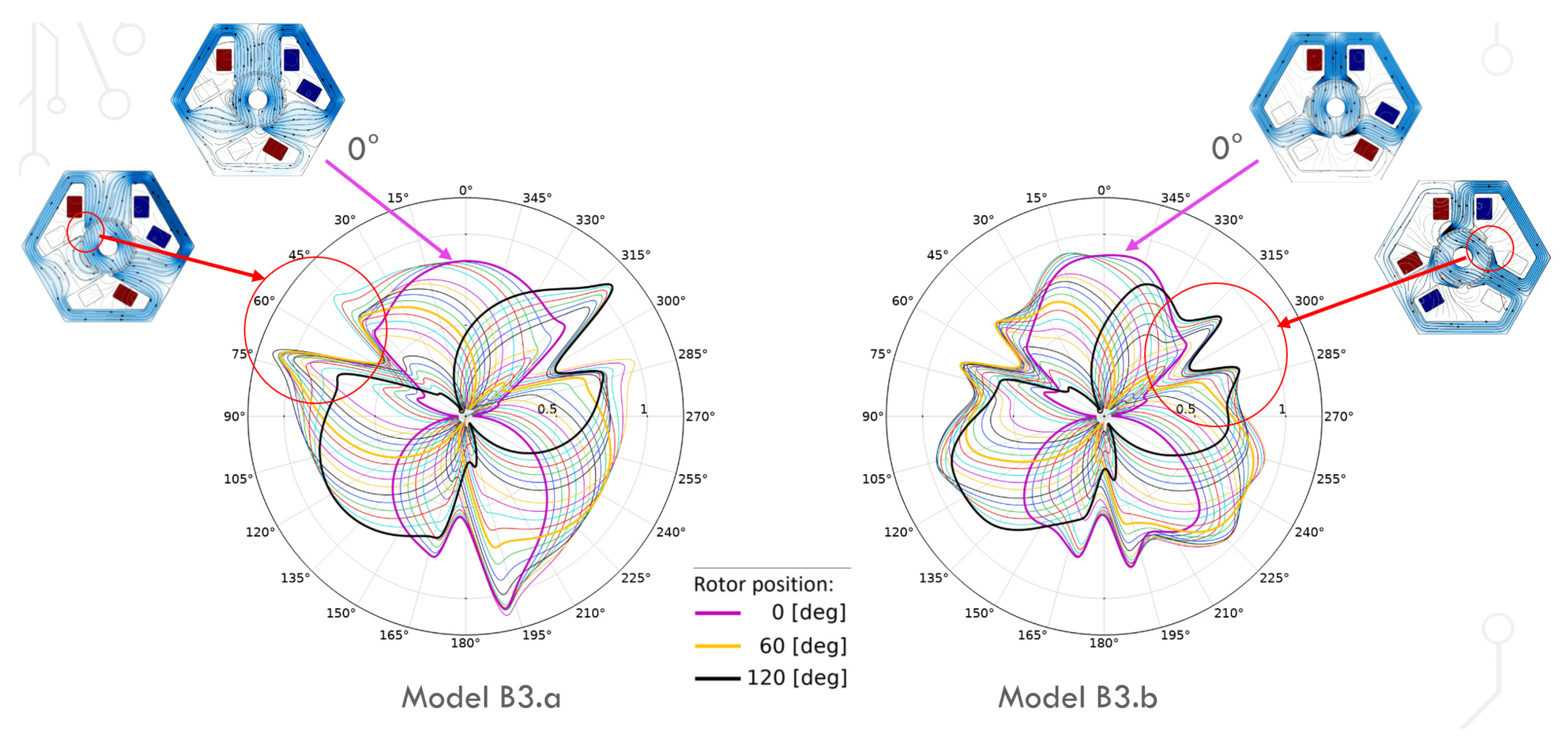
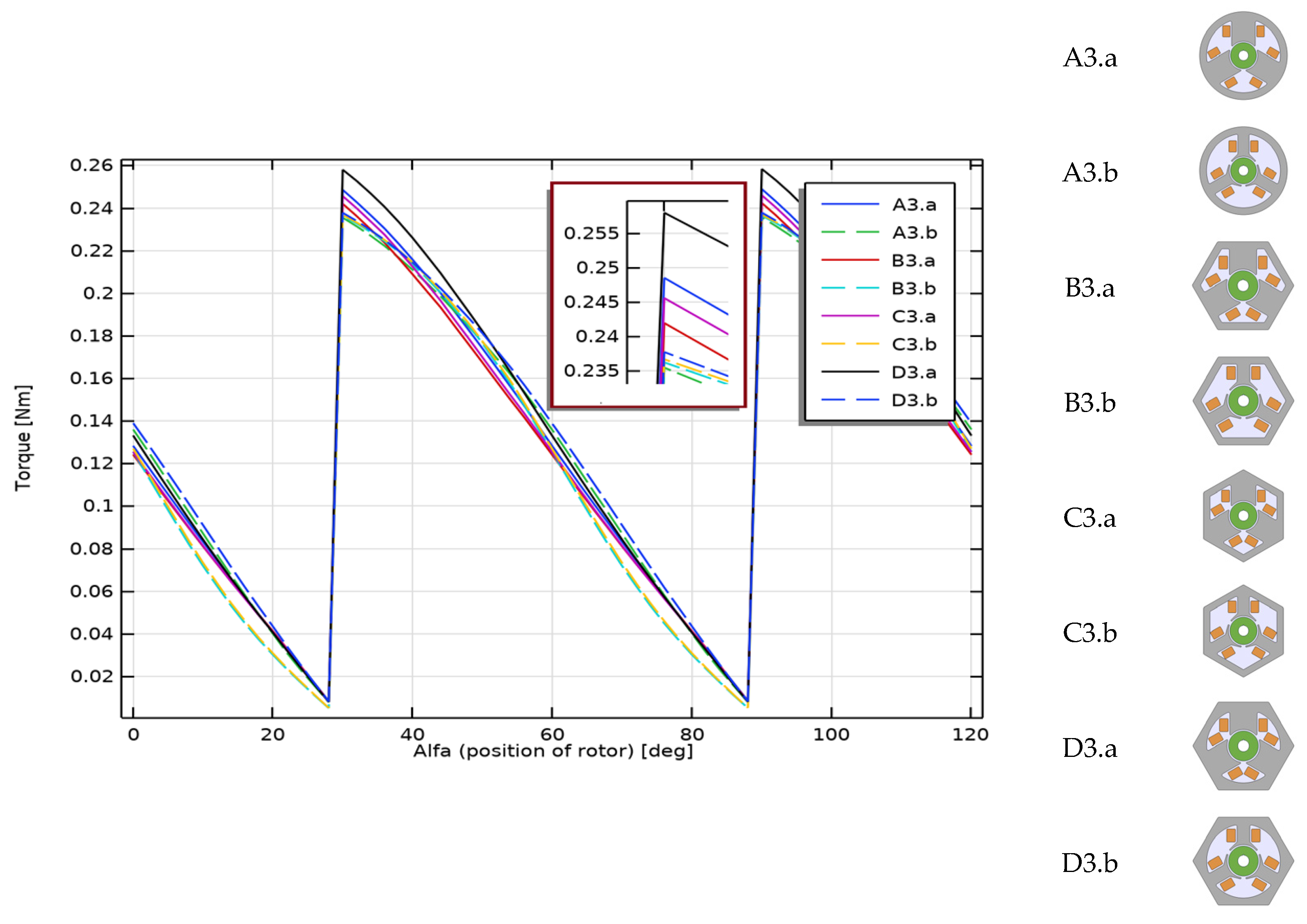
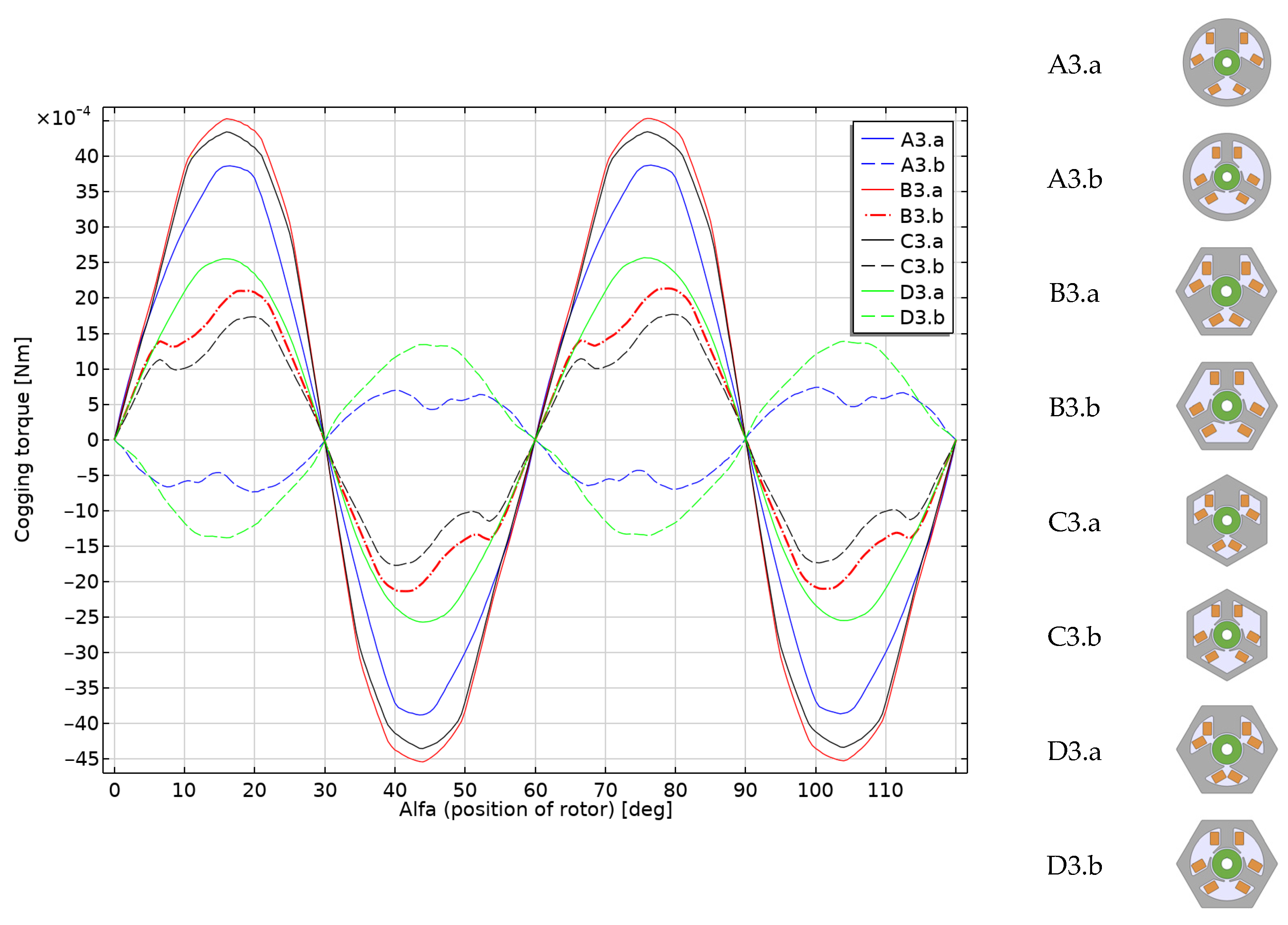
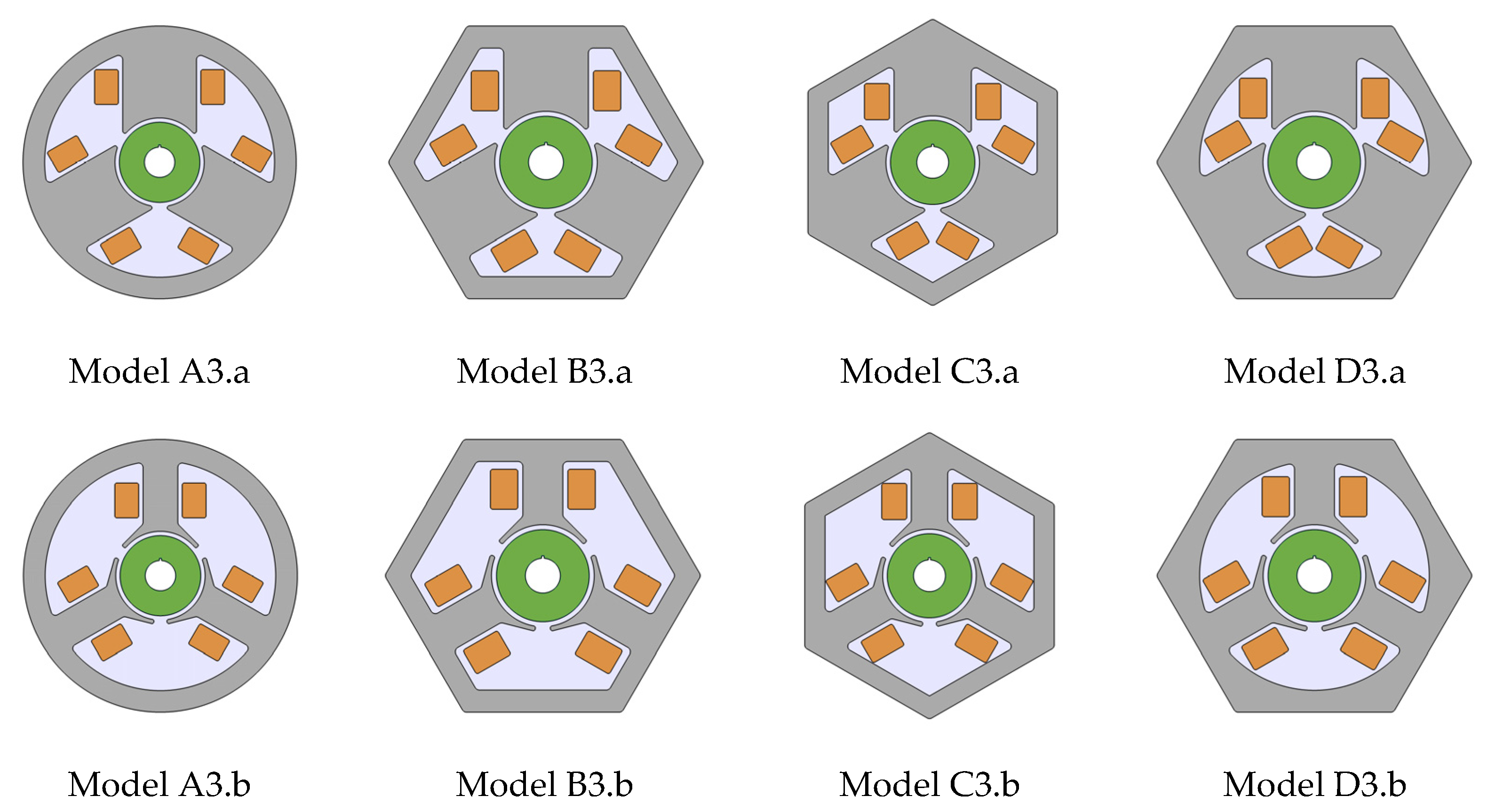
3. Models
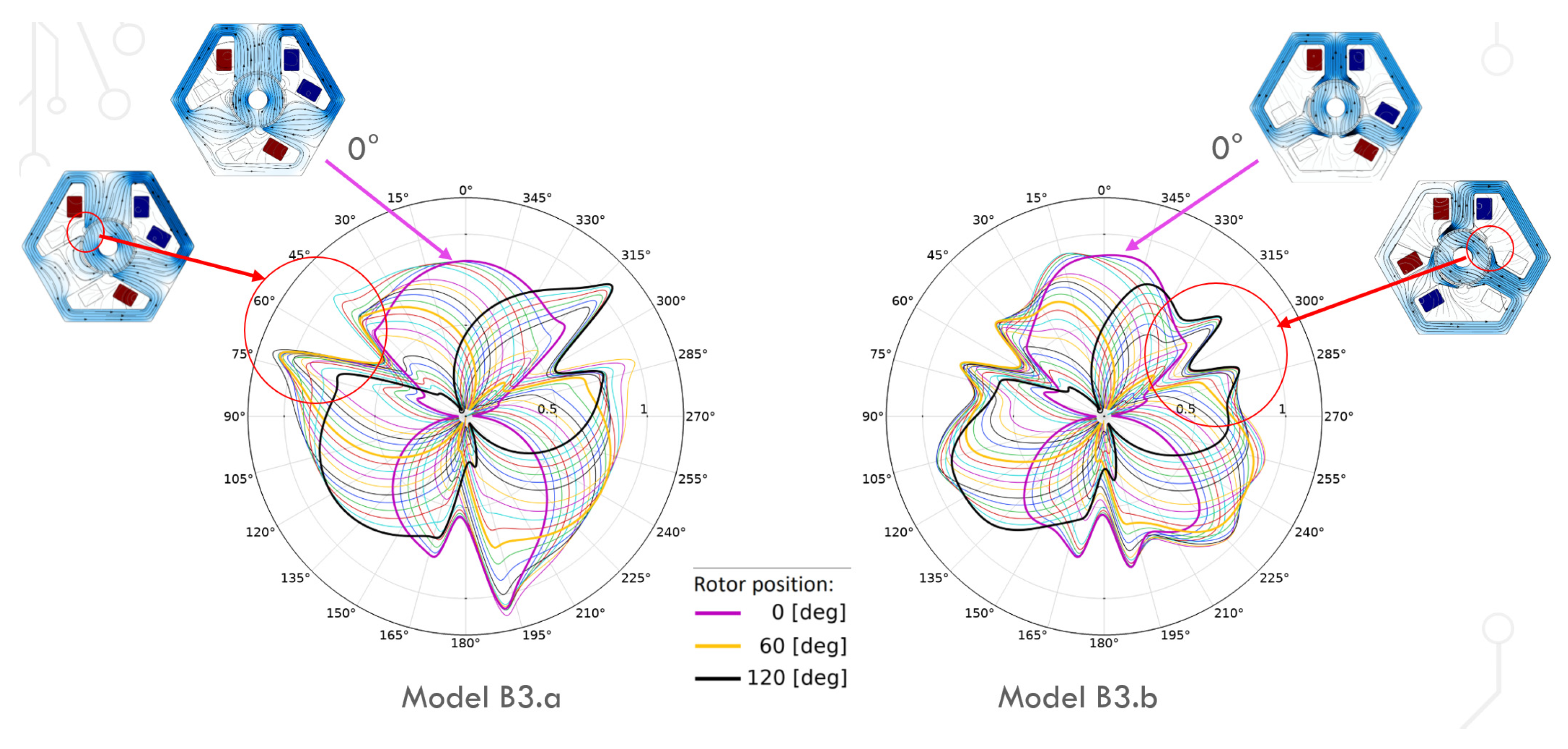
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Petkovska, L.; Cvetkovski, G. Hybrid analytical-FEM analysis of single phase Permanent Magnet Synchronous Motor. In IEEE EUROCON; IEEE: Piscataway, NJ, USA, 2009; pp. 709–716. [Google Scholar] [CrossRef]
- Novak, L.; Širok, B.; Hočevar, M.; Gatarić, P. Influence of load mass and drum speed on fabric motion and performance of a heat pump tumble dryer. Dry. Technol. 2021, 39, 950–964. [Google Scholar] [CrossRef]
- Di Barba, P.; Mognaschi, M.E.; Przybylski, M.; Rezaei, N.; Slusarek, B.; Wiak, S. Field-based analysis and optimal shape synthesis of switched reluctance motors. Lect. Notes Electr. Eng. 2018, 452, 71–85. [Google Scholar] [CrossRef]
- Nam, H.; Park, S.B.; Kang, G.H.; Hong, J.P.; Eom, J.B.; Jung, T.U. Design to improve starting performance of line-start synchronous reluctance motor for household appliances. In Conference Record of the 2004 IEEE Industry Applications Conference, Proceedings of the 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 1. [Google Scholar] [CrossRef]
- Saghin, S.M.; Ghaheri, A.; Shirzad, H.; Afjei, E. Performance optimisation of a segmented outer rotor flux switching permanent magnet motor for direct drive washing machine application. IET Electr. Power Appl. 2021, 15, 1574–1587. [Google Scholar] [CrossRef]
- Mutluer, M. Analysis and design optimization of permanent magnet motor with external rotor for direct driven mixer. J. Electr. Eng. Technol. 2021, 16, 1527–1538. [Google Scholar] [CrossRef]
- Abdeljawed, H.B.; El Amraoui, L. Simulation and rapid control prototyping of DC powered universal motors speed control: Towards an efficient operation in future DC homes. Int. J. Eng. Sci. Technol. 2022, 34, 101092. [Google Scholar] [CrossRef]
- Degano, M.; Murataliyev, M.; Shuo, W.; Barater, D.; Buticchi, G.; Jara, W.; Bianchi, N.; Galea, M.; Gerada, C. Optimised Design of Permanent Magnet Assisted Synchronous Reluctance Machines for Household Appliances. IEEE Trans. Energy Convers. 2021, 36, 3084–3095. [Google Scholar] [CrossRef]
- Arunkumar, S.; Sundaram, N.M.; Thottungal, R.; Shreya, A. A Bridge Type DC-DC Converter fed BLDC Motor Drive for Household Appliances. In Proceedings of the International Conference on Advancements in Electrical, Electronics, Communication, Computing and Automation (ICAECA), Virtual, 8–9 October 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A review of sensorless control methods for AC motor drives. CES Trans. Electr. Mach. Syst. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Hembach, H.; Evans, S.A.; Gerling, D. Systematic comparison of BLDC motors for small automotive water pump applications. In Proceedings of the 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Lee, W.J.; Sul, S.K. A new starting method of BLDC motors without position sensor. IEEE Trans. Ind. Appl. 2006, 42, 1532–1538. [Google Scholar] [CrossRef]
- Jeong, C.L.; Hur, J. A novel proposal to improve reliability of spoke-type BLDC motor using ferrite permanent magnet. IEEE Trans. Ind. Appl. 2016, 52, 3814–3821. [Google Scholar] [CrossRef]
- Krykowski, K.; Hetmańczyk, J.; Gałuszkiewicz, Z.; Miksiewicz, R. Computer analysis of high-speed PM BLDC motor properties. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2011, 30, 941–956. [Google Scholar] [CrossRef]
- Misal, S.R.; Bhasme, N.R. A review of multi-switch BLDC motor drive. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology Development of Electric Vehicles: A Review. Energies 2020, 13, 90. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.C.; Sangam, N.; Pagidipala, S.; Salkuti, S.R. Design and Analysis of BLDC Motor Driver for Hybrid Electric Vehicles. In Next Generation Smart Grids: Modeling, Control and Optimization; Salkuti, S.R., Ray, P., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2022; Volume 824. [Google Scholar] [CrossRef]
- Vidhya, H.; Allirani, S. A Literature Review on Electric Vehicles: Architecture, Electrical Machines for Power Train, Converter Topologies and Control Techniques. In Proceedings of the 2021 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 1–3 December 2021; pp. 565–575. [Google Scholar] [CrossRef]
- Kumar, D.; Gupta, R.A. A comprehensive review on BLDC motor and its control techniques. Int. J. Power Electron. 2021, 14, 292–335. [Google Scholar] [CrossRef]
- Tejaswini, K.; Qutubuddin, M.D. Simulation And Design of Novel System for BLDC Motor Using Advanced Drive System Converter Circuit. J. Eng. Sci. 2021, 12, 326–332. [Google Scholar]
- Stănică, D.M.; Bizon, N.; Arva, M.C. A brief review of sensorless motors position control. In Proceedings of the 2021 13th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Pitesti, Romania, 1–3 July 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Gamazo-Real, J.C.; Vázquez-Sánchez, E.; Gómez-Gil, J. Position and speed control of brushless DC motors using sensorless techniques and application trends. Sensors 2010, 10, 6901–6947. [Google Scholar] [CrossRef] [Green Version]
- Mohan, H.; Pathak, M.K.; Dwivedi, S.K. Sensorless control of electric drives—A technological review. IETE Tech. Rev. 2020, 37, 504–528. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.; Solsona, J. Position sensorless permanent magnet synchronous machine drives—A review. IEEE Trans. Ind. Electron. 2019, 67, 5830–5842. [Google Scholar] [CrossRef]
- Glinka, T. Electric motors with permanent magnets. Przegląd Elektrotechniczny 2008, 33, 1–7. [Google Scholar]
- Hong, J.P.; Ha, K.H.; Lee, J. Stator pole and yoke design for vibration reduction of switched reluctance motor. IEEE Trans. Magn. 2002, 38, 929–932. [Google Scholar] [CrossRef]
- Xue, S.; Xu, H.; Fang, C. The effect of stator slot and air gap length on high speed brushless PM motor. In Proceedings of the 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; Volume 1, pp. 281–285. [Google Scholar] [CrossRef]
- Kiani, M.; Salarieh, H.; Alasty, A.; Darbandi, S.M. Stabilization of a Three-Pole Active Magnetic Bearing by Hybrid Control Method in Static Mode. Int. J. Mech. Mechatron. Eng. 2016, 10, 1456–1466. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, H. Radial magnetic bearings: An overview. Results Phys. 2017, 7, 3756–3766. [Google Scholar] [CrossRef]
- Hiremath, R. Finite element study of induced Emf, cogging torque and its reductions in BLDC motor. In Proceedings of the 2017 International Conference on Intelligent Computing, Instrumentation and Control Technologies, ICICICT, Kannur, Kerala, 6–7 July 2017; pp. 1665–1668. [Google Scholar] [CrossRef]
- Yaz, M.; Cetin, E. Brushless Direct Current Motor Design and Analysis. COJ Electron. Commun. 2021, 2, COJEC.000534.2021. [Google Scholar] [CrossRef]
- Zhu, L.; Jiang, S.Z.; Zhu, Z.Q.; Chan, C.C. Analytical Methods for Minimizing Cogging Torque in Permanent-Magnet Machines. IEEE Trans. Magn. 2009, 45, 2023–2031. [Google Scholar] [CrossRef]
- Anuja, T.A.; Doss, M.A.N. Reduction of Cogging Torque in Surface Mounted Permanent Magnet Brushless DC Motor by Adapting Rotor Magnetic Displacement. Energies 2021, 14, 2861. [Google Scholar] [CrossRef]
- Anuja, T.A.; Doss, M.A.N. Asymmetrical Magnets in Rotor Structure of a Permanent Magnet Brushless DC Motor for Cogging Torque Minimization. J. Electr. Eng. Technol. 2022, 17, 1271–1279. [Google Scholar] [CrossRef]
- Li, Z.; Yu, X.; Wang, X.; Xing, X. Optimization and Analysis of Cogging Torque of Permanent Magnet Spherical Motor. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Value |
|---|---|---|
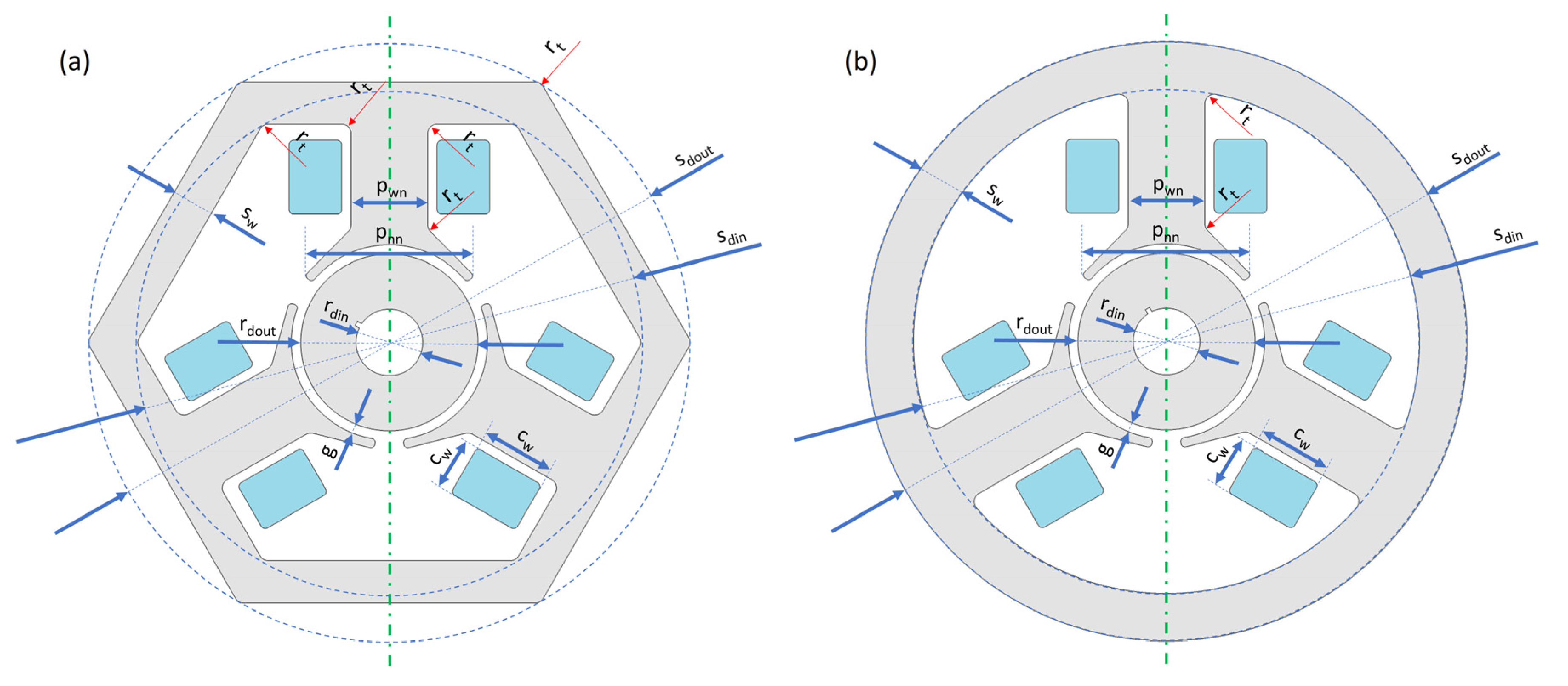
| sdout | Stator outer diameter 1 | 63 mm |
| sdin | Stator inner diameter 1 | 53 mm |
| sw | External stator width | 5 mm |
| pwn | The width of the narrow pole | 8 mm |
| pww | The width of the wide pole | 17 mm |
| g | Air gap length | 1 mm |
| rdout | Rotor outer diameter | 7 mm |
| rdin | Rotor inner diameter | 4 mm |
| mw | Motor width | 19 mm |
| rt | Technical roundings | 1 mm |
| cw | Coil width | 5.5 mm |
| ch | Coin height | 7.8 mm |
| Rc | One coil resistance | 39.6 ohm |
| U | Voltage | 54 V |
| P | Power | 30 W |
| v | Speed | 3300 r/min |
| Model | Stator Area (m2) |
|---|---|
| A3.a | 1.78 × 10−3 |
| A3.b | 1.35 × 10−3 |
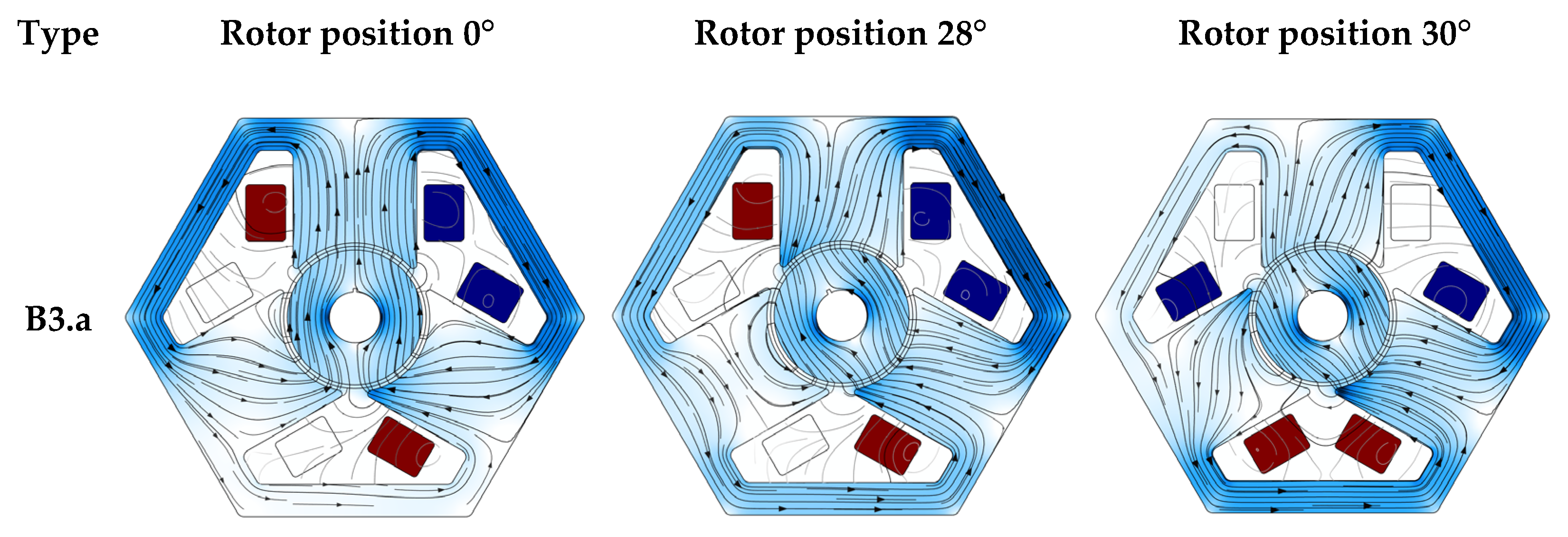
| B3.a | 1.49 × 10−3 |
| B3.b | 1.14 × 10−3 |
| C3.a | 1.55 × 10−3 |
| C3.b | 1.20 × 10−3 |
| D3.a | 1.63 × 10−3 |
| D3.b | 1.30 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smółka, K.; Firych-Nowacka, A.; Wiak, S. Comparison of the Design of 3-Pole BLDC Actuators/Motors with a Rotor Based on a Single Permanent Magnet. Sensors 2022, 22, 3759. https://doi.org/10.3390/s22103759
Smółka K, Firych-Nowacka A, Wiak S. Comparison of the Design of 3-Pole BLDC Actuators/Motors with a Rotor Based on a Single Permanent Magnet. Sensors. 2022; 22(10):3759. https://doi.org/10.3390/s22103759
Chicago/Turabian StyleSmółka, Krzysztof, Anna Firych-Nowacka, and Sławomir Wiak. 2022. "Comparison of the Design of 3-Pole BLDC Actuators/Motors with a Rotor Based on a Single Permanent Magnet" Sensors 22, no. 10: 3759. https://doi.org/10.3390/s22103759
APA StyleSmółka, K., Firych-Nowacka, A., & Wiak, S. (2022). Comparison of the Design of 3-Pole BLDC Actuators/Motors with a Rotor Based on a Single Permanent Magnet. Sensors, 22(10), 3759. https://doi.org/10.3390/s22103759