
Design of Citrus Fruit Detection System Based on Mobile Platform and Edge Computer Device



Abstract
:1. Introduction
- (1)
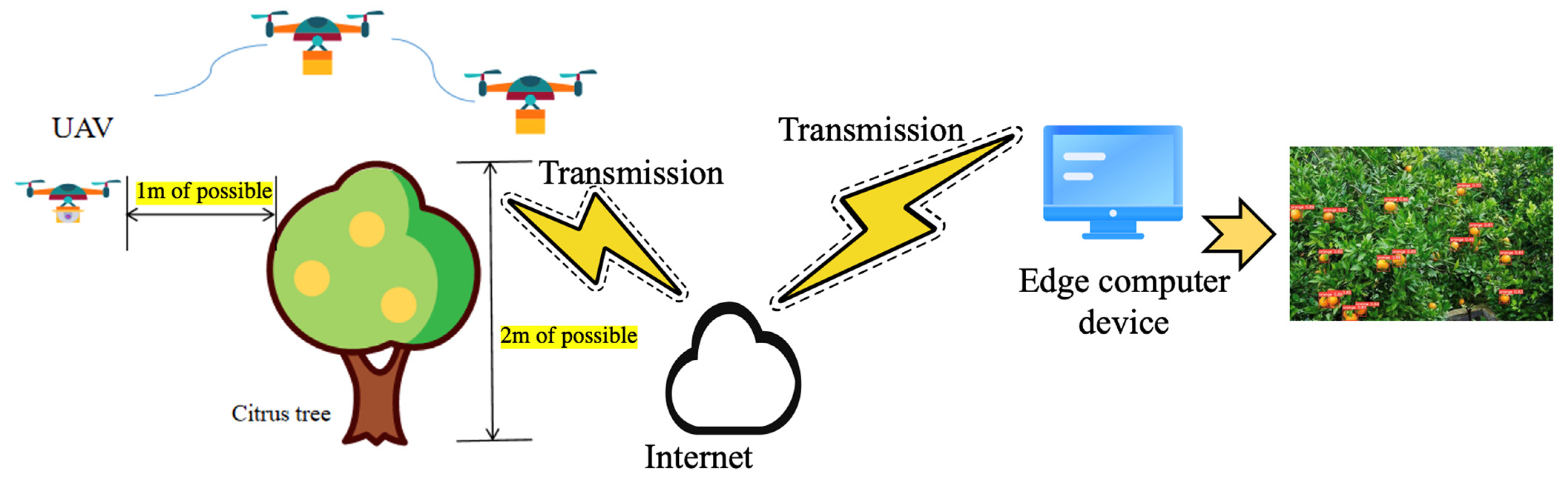
- Combined with the advantages of the mobile operating platform and edge computing equipment, the improved deep learning target detection model is used to accurately and real-time detect the omni-directional citrus fruit image taken by UAV.
- (2)
- The target detection algorithm was improved and optimized. Attention mechanism, multi-layer feature adaptive fusion, and pruning optimization are adopted to improve the accuracy and reasoning speed of the model.
2. Data Acquisition and System Design
2.1. Collection and Transmission of Citrus Fruit Data Set
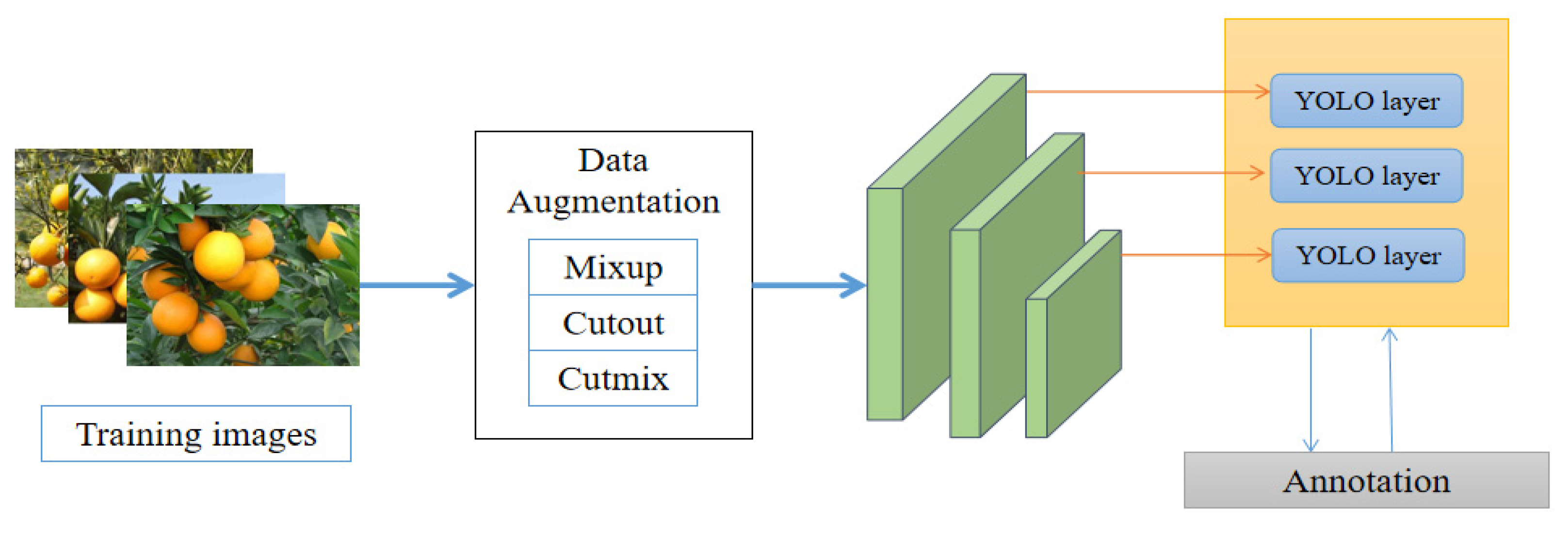
2.2. Data Enhancement
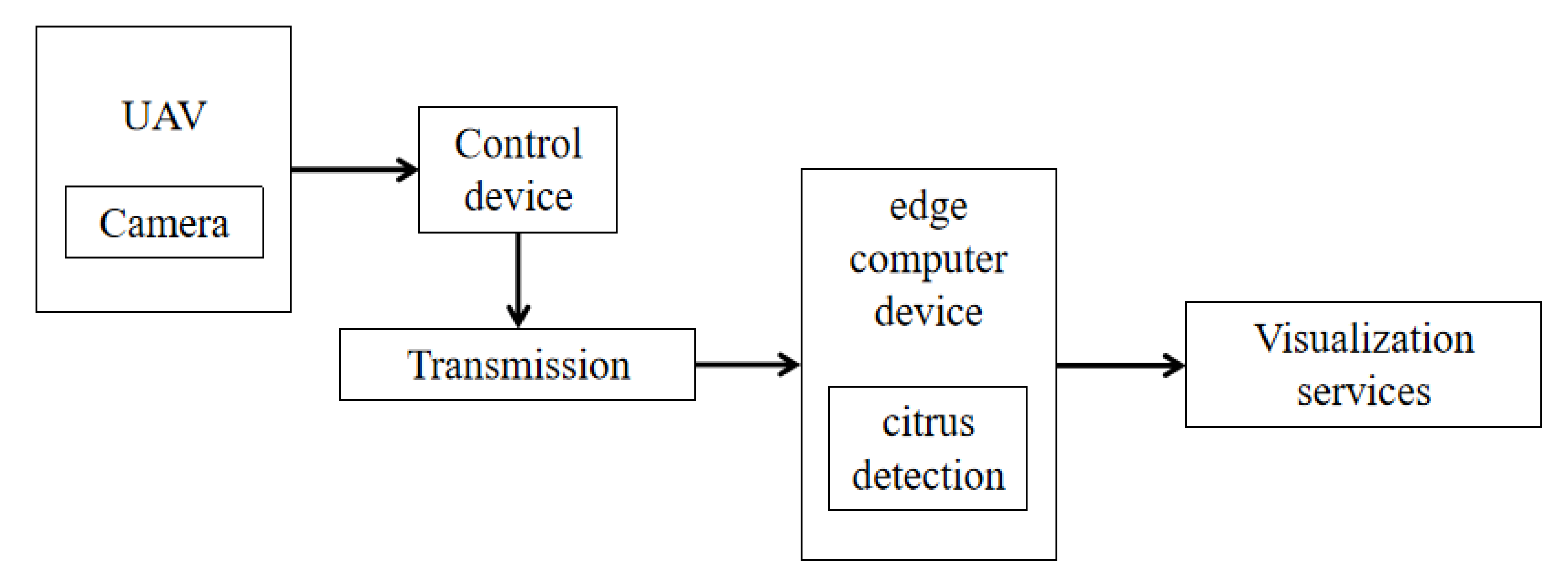
2.3. Design of Edge Computing Device
3. Construction of Citrus Target Recognition Model
3.1. Basic Model Selection
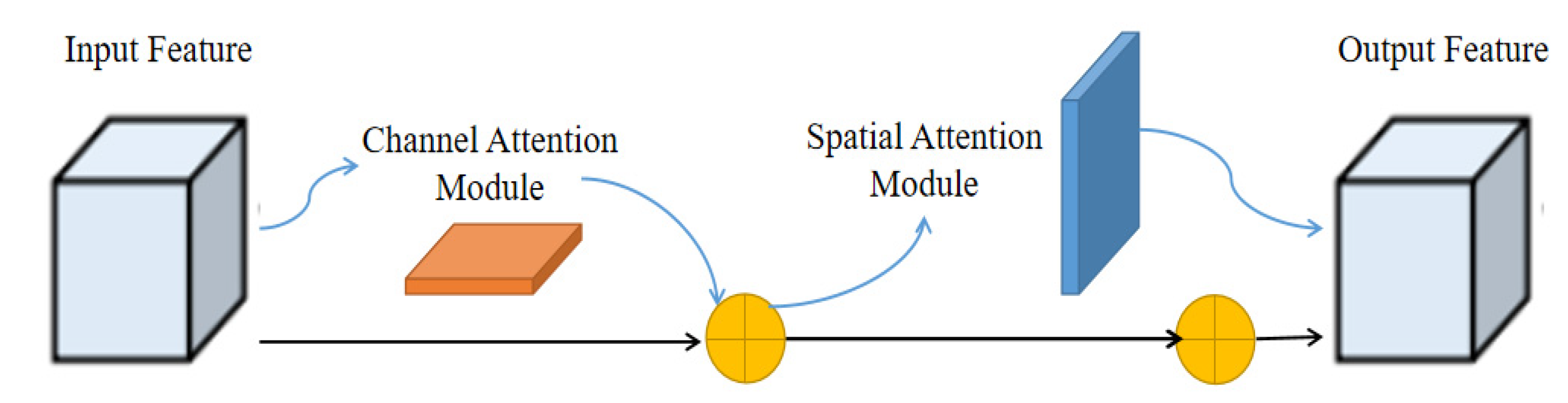
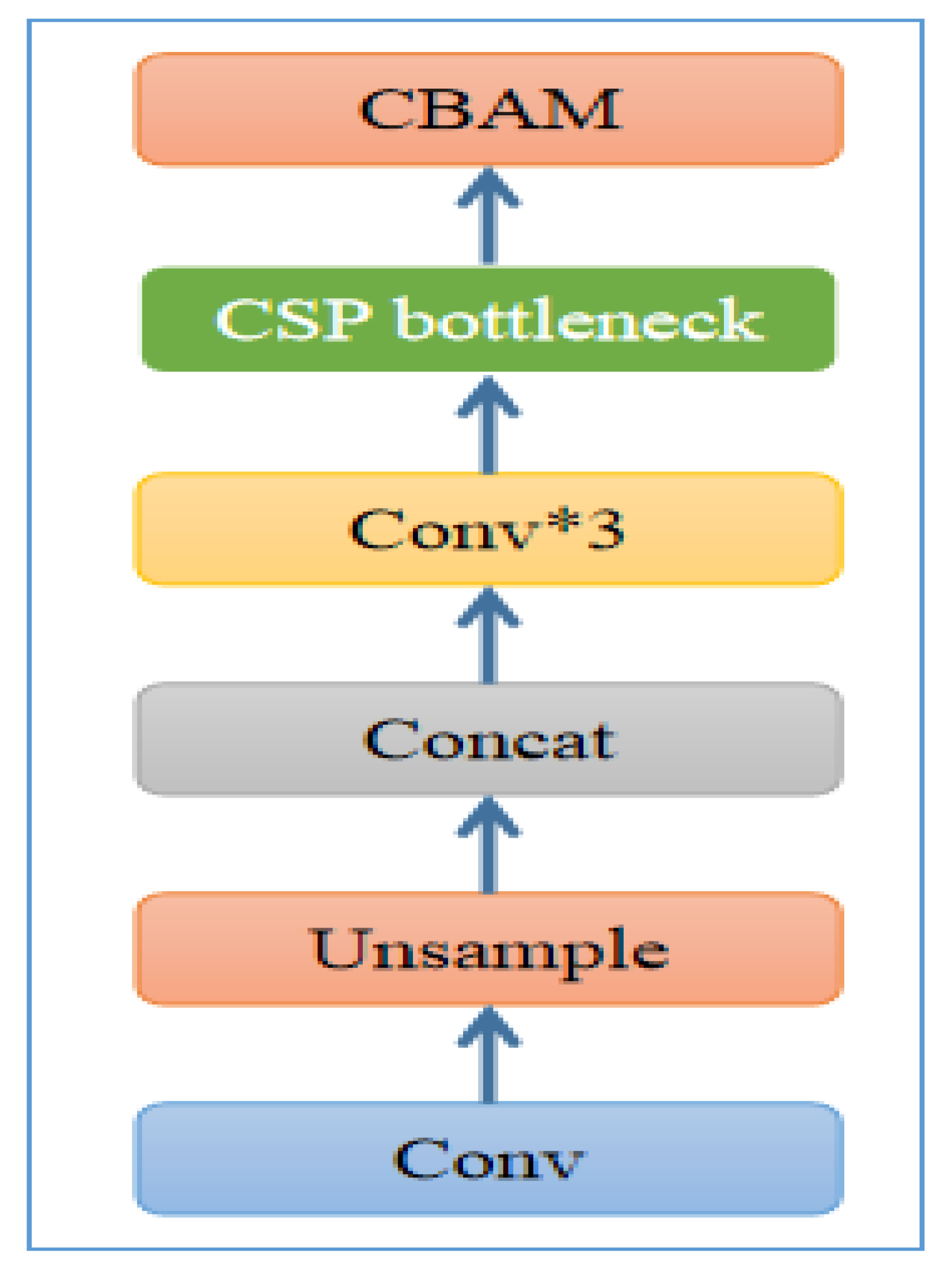
3.2. Module Design of Attention Mechanism
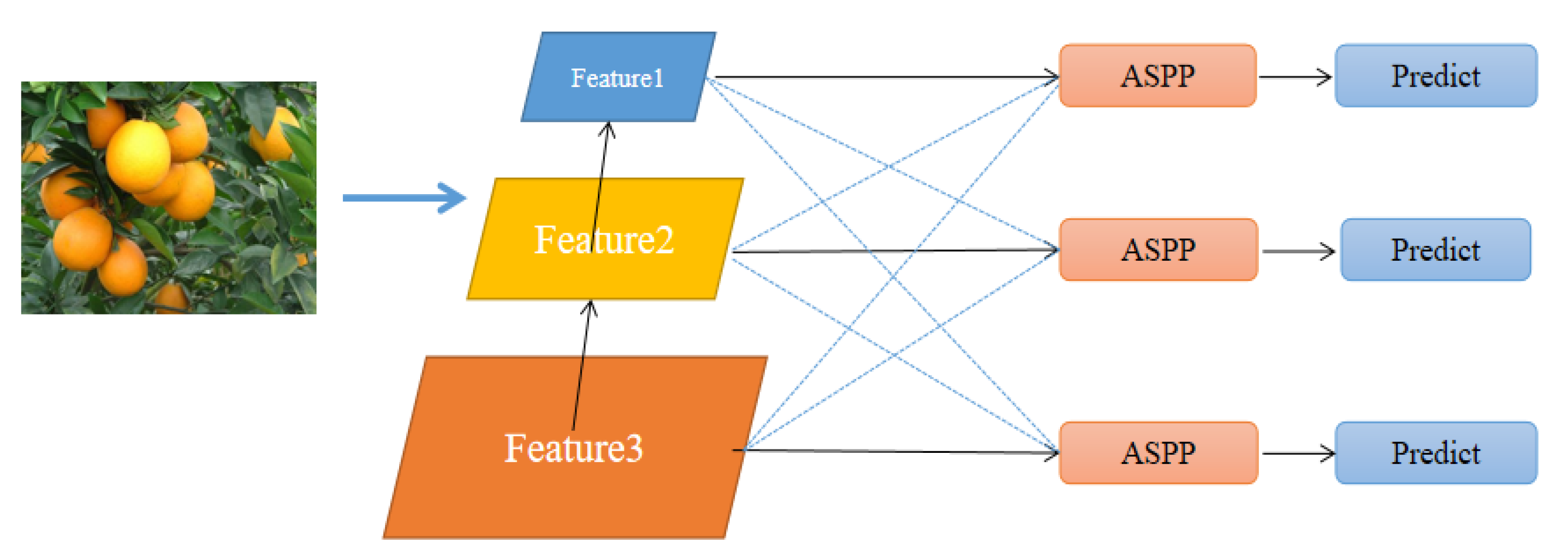
3.3. Adaptive Feature Fusion
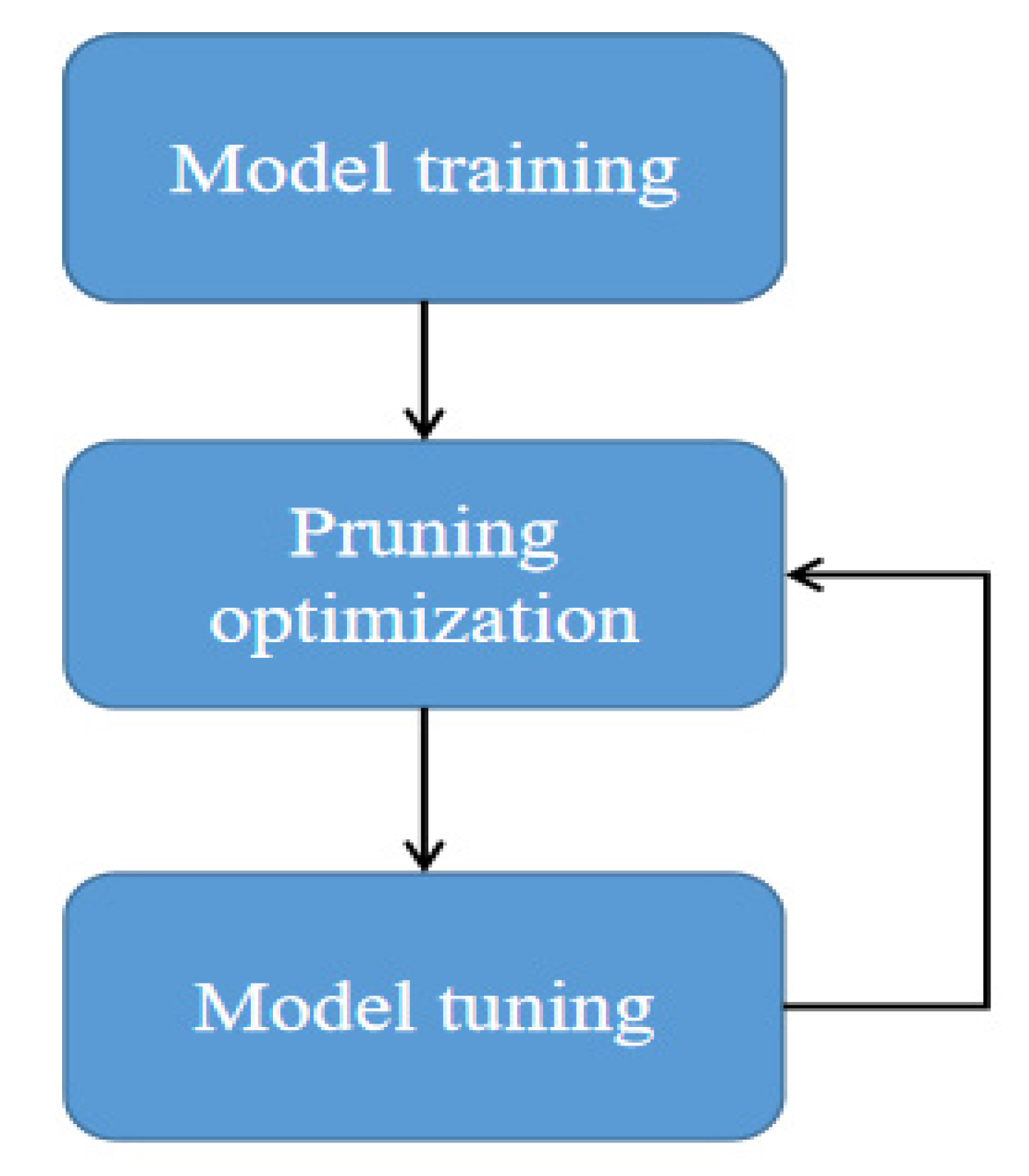
3.4. Model Pruning
4. Experiment and Results
4.1. Experimental Training Setting
4.2. Ablation Experiment
4.3. Comparative Test of Different Occlusion Degrees
4.4. Comparative Experiment of Different Target Detection Models
5. Conclusions
- Benefiting from the strong maneuverability and high security of UAV aerial images, and not limited to the actual scene of Mountain Orchard, we collected and labeled 1800 citrus images for target detection model training.
- Improve the current most advanced target detection model and use CBAM attention mechanism and data enhancement to improve the generalization and accuracy of the model; At the same time, the L2 regularization method constraint model adds to delete the redundant channel with the minimum weight of 30% and fine-tune it. It is detected in the Jetson nano edge computing device. The results are achieved. While ensuring accuracy, a faster detection speed is achieved.
6. Discussion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xing, S.; Lee, M. Classification Accuracy Improvement for Small-Size Citrus Pests and Diseases Using Bridge Connections in Deep Neural Networks. Sensors 2020, 20, 4992. [Google Scholar] [CrossRef] [PubMed]
- Harrell, R.C.; Adsit, P.D.; Munilla, R.D.; Slaughter, D.C. Robotic Picking of Citrus. Robotica 1990, 8, 269–278. [Google Scholar] [CrossRef]
- Dorj, U.-O.; Lee, M.; Yun, S.-S. An Yield Estimation in Citrus Orchards via Fruit Detection and Counting Using Image Processing. Comput. Electron. Agric. 2017, 140, 103–112. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 886–893. [Google Scholar]
- Zeng, Z.Q.; Yu, H.B.; Xu, H.R.; Xie, Y.Q.; Gao, J. Fast Training Support Vector Machines Using Parallel Sequential Minimal Optimization. In Proceedings of the 2008 3rd International Conference on Intelligent System and Knowledge Engineering, Xiamen, China, 17–19 November 2008; IEEE: Piscataway, NJ, USA, 2008; Volume 1, pp. 997–1001. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully convolutional One-Stage Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 9627–9636. [Google Scholar]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint Triplets for Object Detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 6569–6578. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. Deepfruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tian, Y.; Yang, G.; Wang, Z.; Wang, H.; Li, E.; Liang, Z. Apple Detection during Different Growth Stages in Orchards Using the Improved YOLO-V3 Model. Comput. Electron. Agric. 2019, 157, 417–426. [Google Scholar] [CrossRef]
- Chen, S.W.; Shivakumar, S.S.; Dcunha, S.; Das, J.; Okon, E.; Qu, C.; Kumar, V. Counting Apples and Oranges with Deep Learning: A Data-Driven Approach. IEEE Robot. Autom. Lett. 2017, 2, 781–788. [Google Scholar] [CrossRef]
- Koirala, A.; Walsh, K.B.; Wang, Z.; McCarthy, C. Deep Learning-Method Overview and Review of Use for Fruit Detection and Yield Estimation. Comput. Electron. Agric. 2019, 162, 219–234. [Google Scholar] [CrossRef]
- Huszár, V.D.; Adhikarla, V.K. Live Spoofing Detection for Automatic Human Activity Recognition Applications. Sensors 2021, 21, 7339. [Google Scholar] [CrossRef] [PubMed]
- Machado, M.A.; Rosado, L.S.; Mendes, N.M.; Miranda, R.M.; Santos, T.G. Multisensor Inspection of Laser-Brazed Joints in the Automotive Industry. Sensors 2021, 21, 7335. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Zhou, J.; Xu, Y. Research Progress of UAV Low Altitude Remote Sensing Monitoring Agricultural Information. J. Xinjiang Univ. (Nat. Sci. Ed.) 2021, 38, 623–631. [Google Scholar]
- Liu, S.B.; Yang, G.J.; Zhou, C.Q.; Jing, H.T.; Feng, H.K.; Xu, B.; Yang, H. Information Extraction of Maize Seedling Number Based on UAV Remote Sensing Image. J. Agric. Eng. 2018, 34, 69–77. [Google Scholar]
- Wang, Y.; Yu, P. A Fast Intrusion Detection Method for High-Speed Railway Clearance Based on Low-Cost Embedded GPUs. Sensors 2021, 21, 7279. [Google Scholar] [CrossRef] [PubMed]
- Lapegna, M.; Balzano, W.; Meyer, N.; Romano, D. Clustering Algorithms on Low-Power and High-Performance Devices for Edge Computing Environment. Sensors 2021, 21, 5395. [Google Scholar] [CrossRef] [PubMed]
- Panero Martinez, R.; Schiopu, I.; Cornelis, B.; Munteanu, A. Real-Time Instance Segmentation of Traffic Videos for Embedded Devices. Sensors 2021, 21, 275. [Google Scholar] [CrossRef] [PubMed]
- Mazzia, V.; Khaliq, A.; Salvetti, F.; Chiaberge, M. Real-Time Apple Detection System Using Embedded Systems with Hardware Accelerators: An Edge AI Application. IEEE Access 2020, 8, 9102–9114. [Google Scholar] [CrossRef]
- Sa, I.; Chen, Z.; Popović, M.; Khanna, R.; Liebisch, F.; Nieto, J.; Siegwart, R. Weednet: Dense Semantic Weed Classification Using Multispectral Images and Mav for Smart Farming. IEEE Robot. Autom. Lett. 2017, 3, 588–595. [Google Scholar] [CrossRef] [Green Version]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Liu, S.; Huang, D.; Wang, Y. Learning Spatial Fusion for Single-Shot Object Detection. arXiv 2019, arXiv:1911.09516. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | AP/% | Speed/ms | Recall/% |
|---|---|---|---|
| YOLOv5s | 91.03 | 270 | 87.13 |
| YOLOv5s + CBAM | 93.42 | 310 | 88.21 |
| YOLOv5s + CBAM + ASFF | 93.86 | 320 | 88.91 |
| YOLOv5s + CBAM + ASFF + Purning | 93.32 | 180 | 88.78 |
| Model | Model Size/MB | AP/% |
|---|---|---|
| Original | 33 | 93.86 |
| First | 27 | 93.55 |
| Second | 21 | 93.32 |
| Model | Dataset. A (AP/%) | Dataset. B (AP/%) |
|---|---|---|
| Original | 95.44 | 87.86 |
| Ours | 96.01 | 90.41 |
| Model | AP/% | FPS (In 2080ti)/s |
|---|---|---|
| FCOS | 90.76 | 47 |
| YOLOv3 | 91.21 | 69 |
| YOLOv4 | 91.97 | 73 |
| Ours | 93.32 | 83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Huang, T.; Li, Z.; Lyu, S.; Hong, T. Design of Citrus Fruit Detection System Based on Mobile Platform and Edge Computer Device. Sensors 2022, 22, 59. https://doi.org/10.3390/s22010059
Huang H, Huang T, Li Z, Lyu S, Hong T. Design of Citrus Fruit Detection System Based on Mobile Platform and Edge Computer Device. Sensors. 2022; 22(1):59. https://doi.org/10.3390/s22010059
Chicago/Turabian StyleHuang, Heqing, Tongbin Huang, Zhen Li, Shilei Lyu, and Tao Hong. 2022. "Design of Citrus Fruit Detection System Based on Mobile Platform and Edge Computer Device" Sensors 22, no. 1: 59. https://doi.org/10.3390/s22010059
APA StyleHuang, H., Huang, T., Li, Z., Lyu, S., & Hong, T. (2022). Design of Citrus Fruit Detection System Based on Mobile Platform and Edge Computer Device. Sensors, 22(1), 59. https://doi.org/10.3390/s22010059