
Inline 3D Volumetric Measurement of Moisture Content in Rice Using Regression-Based ML of RF Tomographic Imaging

 ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
2. Methodology
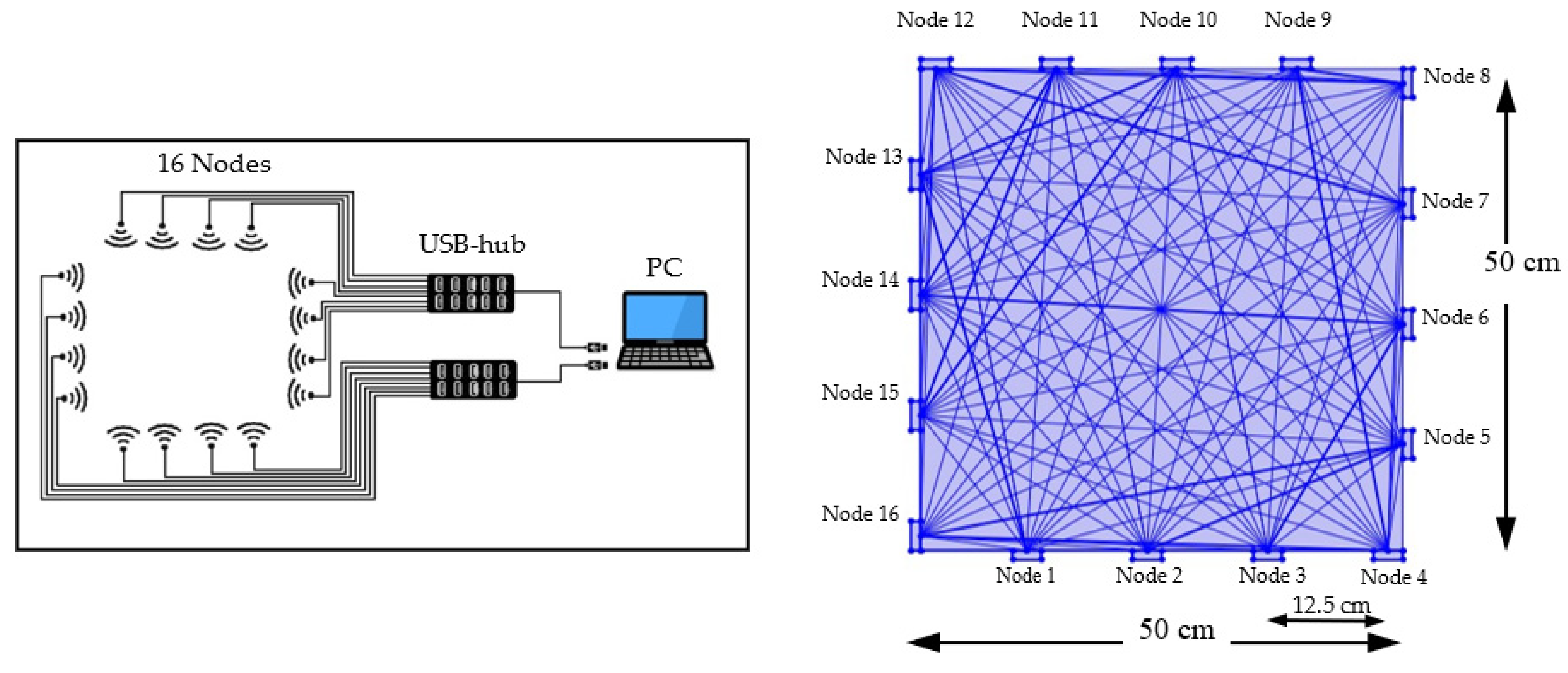
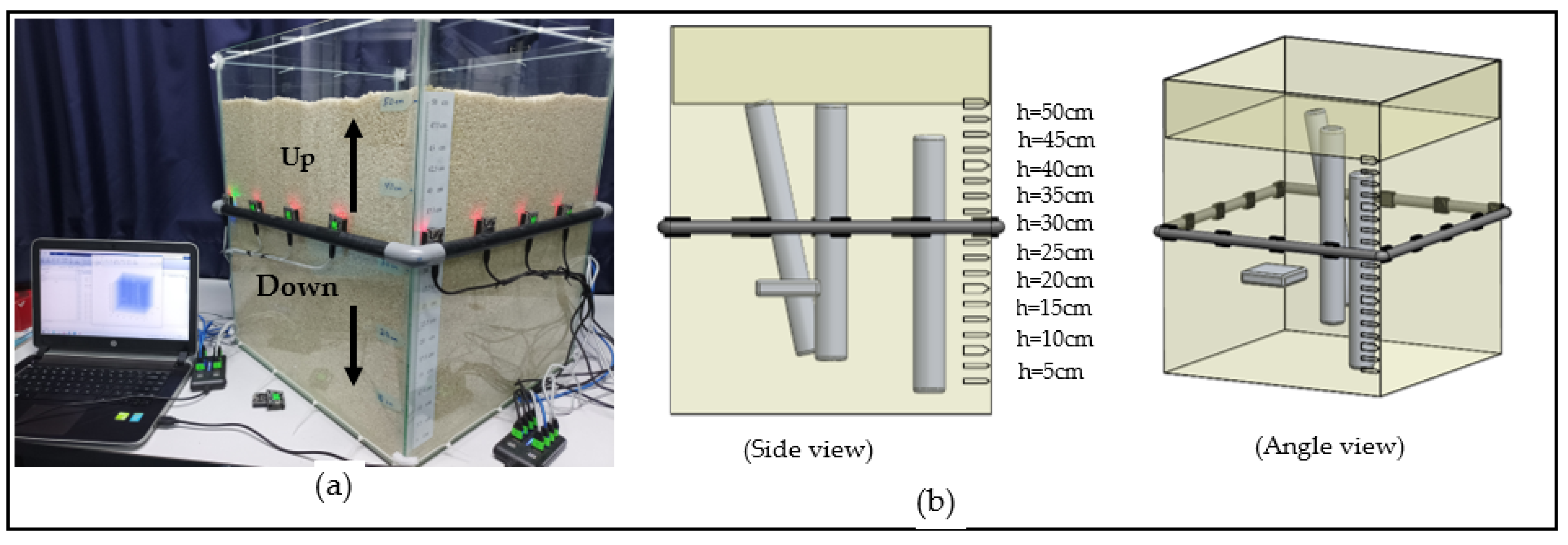
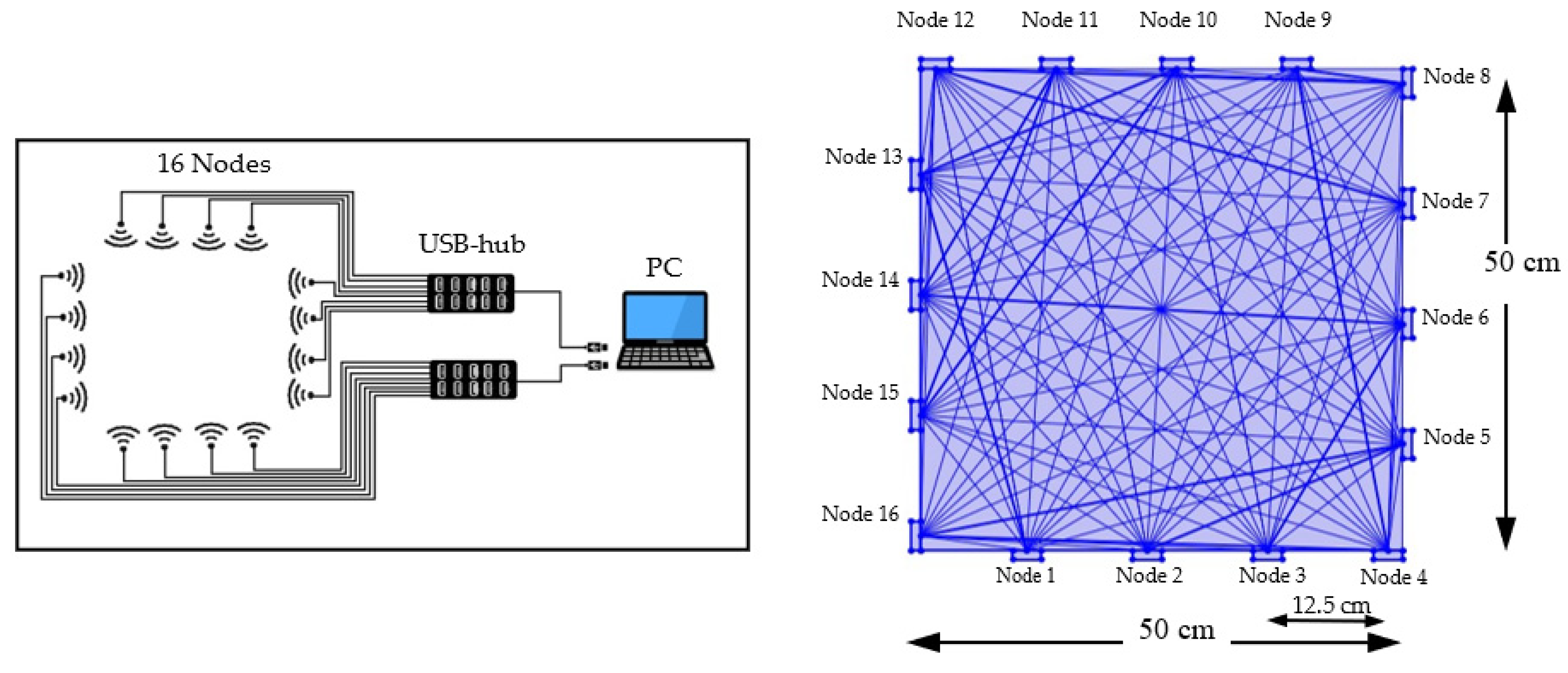
2.1. Experimental Setup
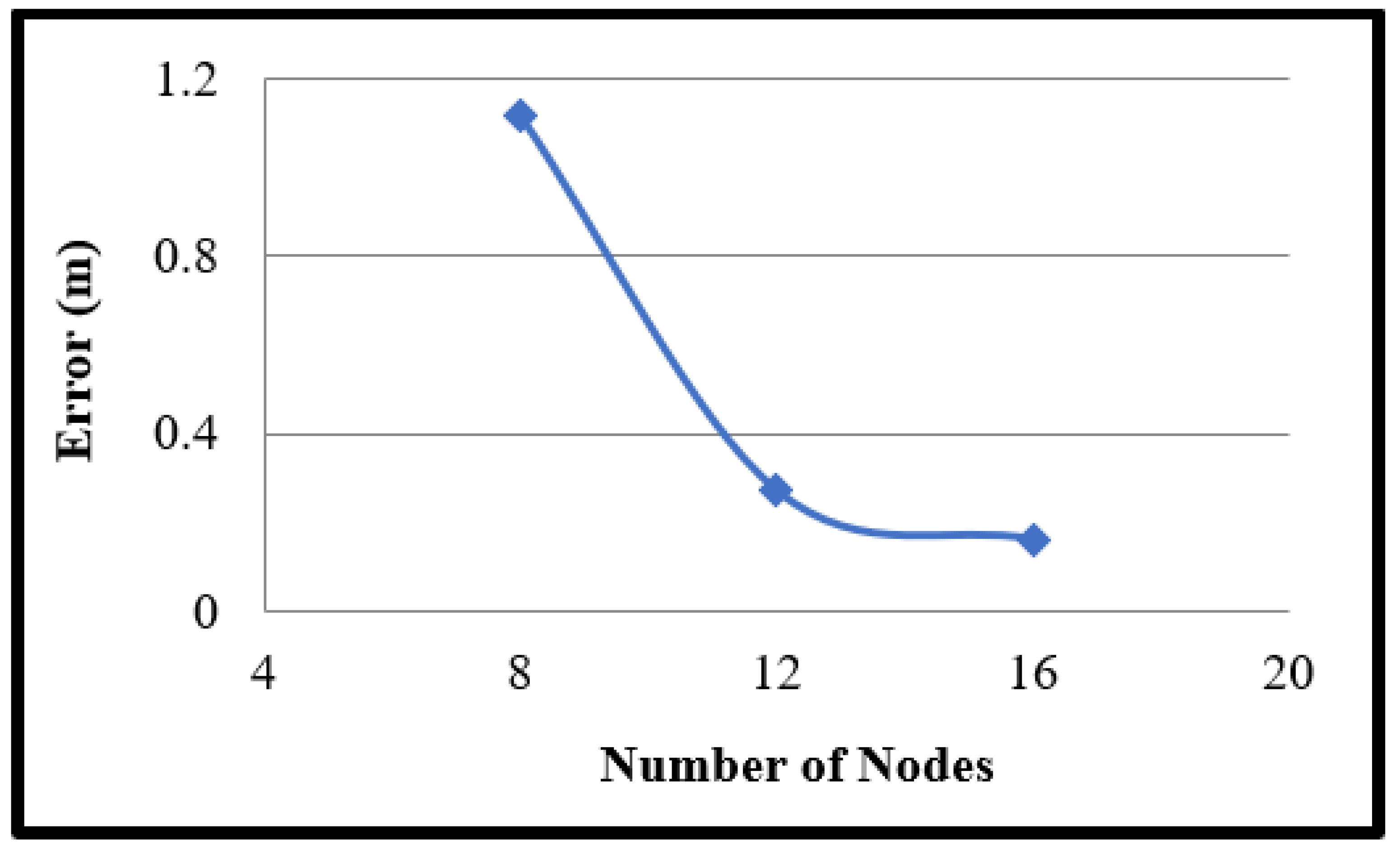
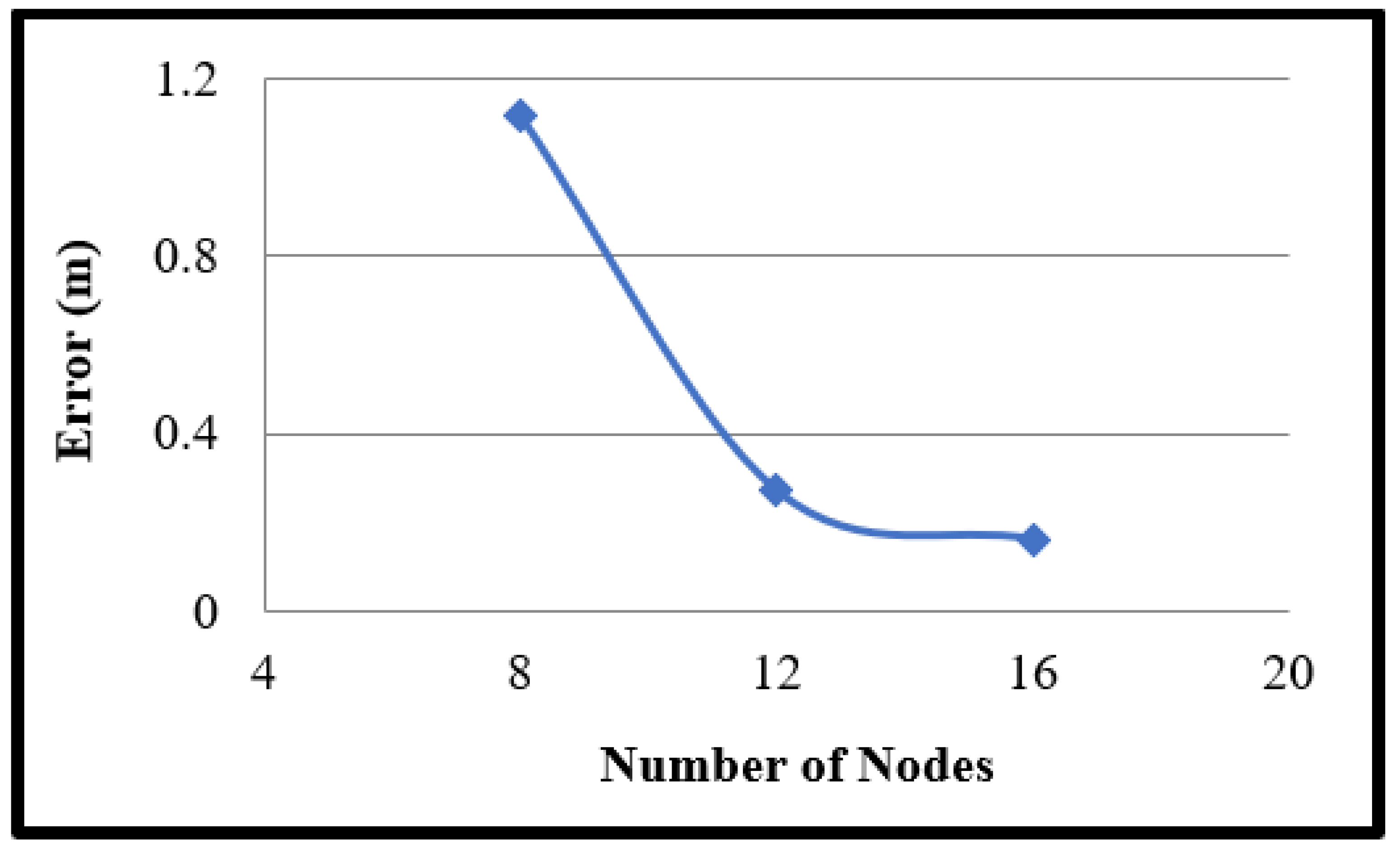
2.2. Number of Nodes
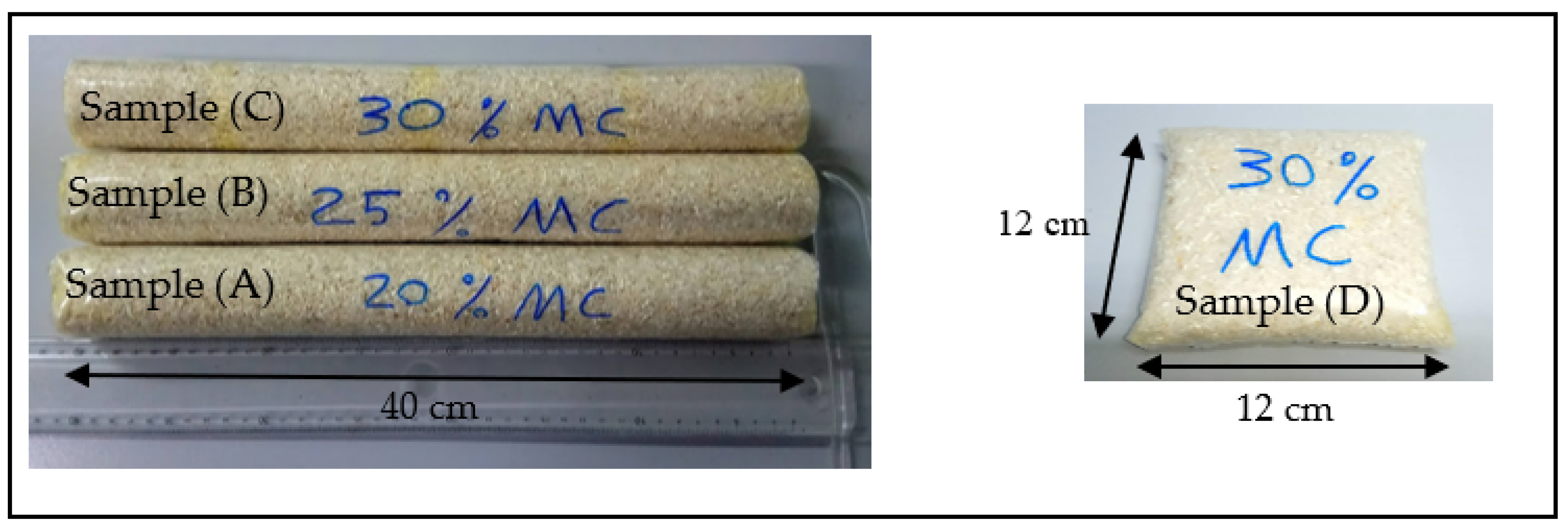
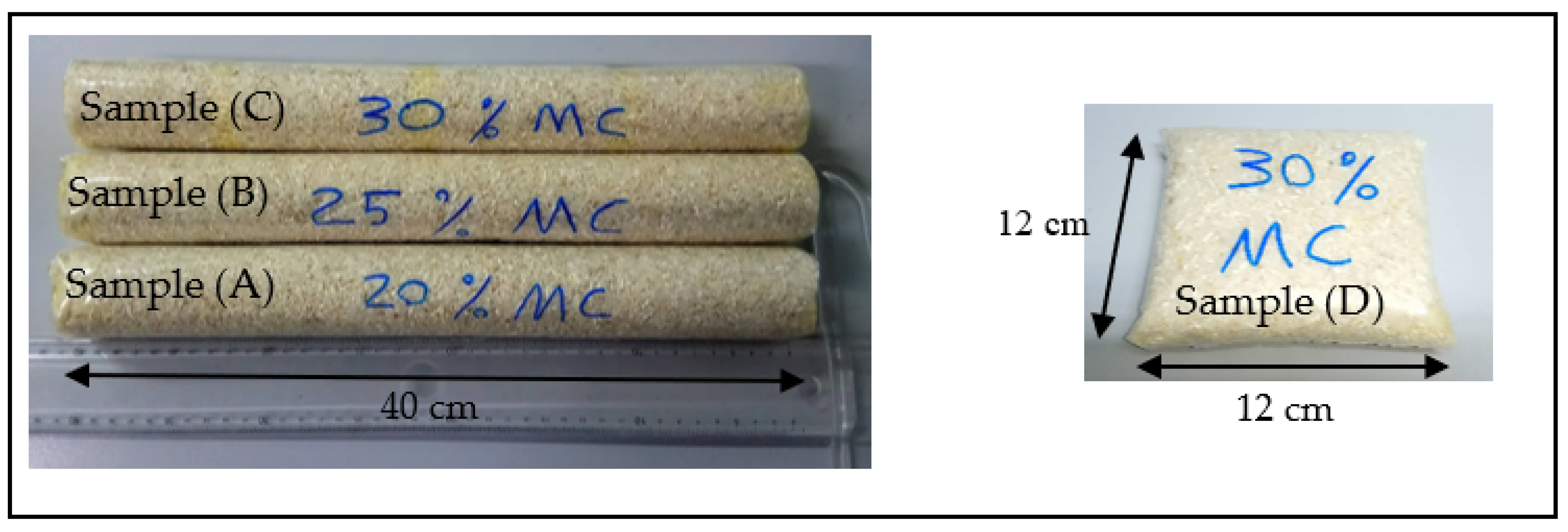
2.3. Sample Conditioning
3. Moisture Content Prediction
3.1. Signal Processing
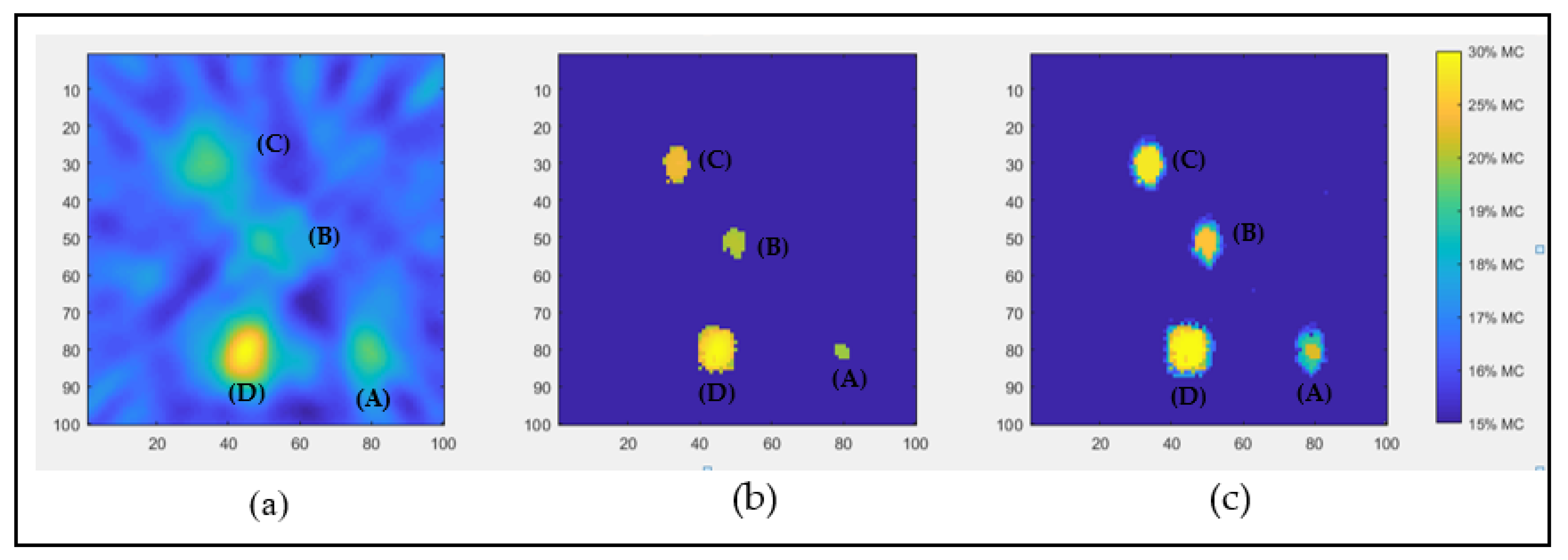
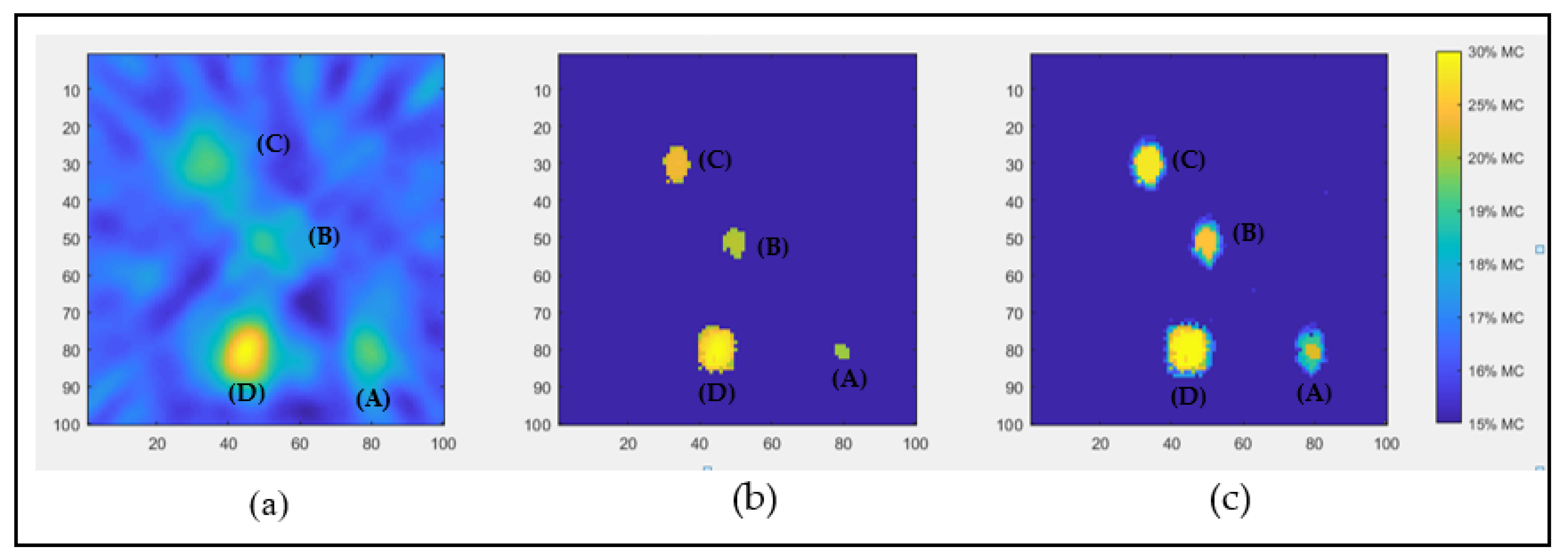
3.2. Regularization RTI
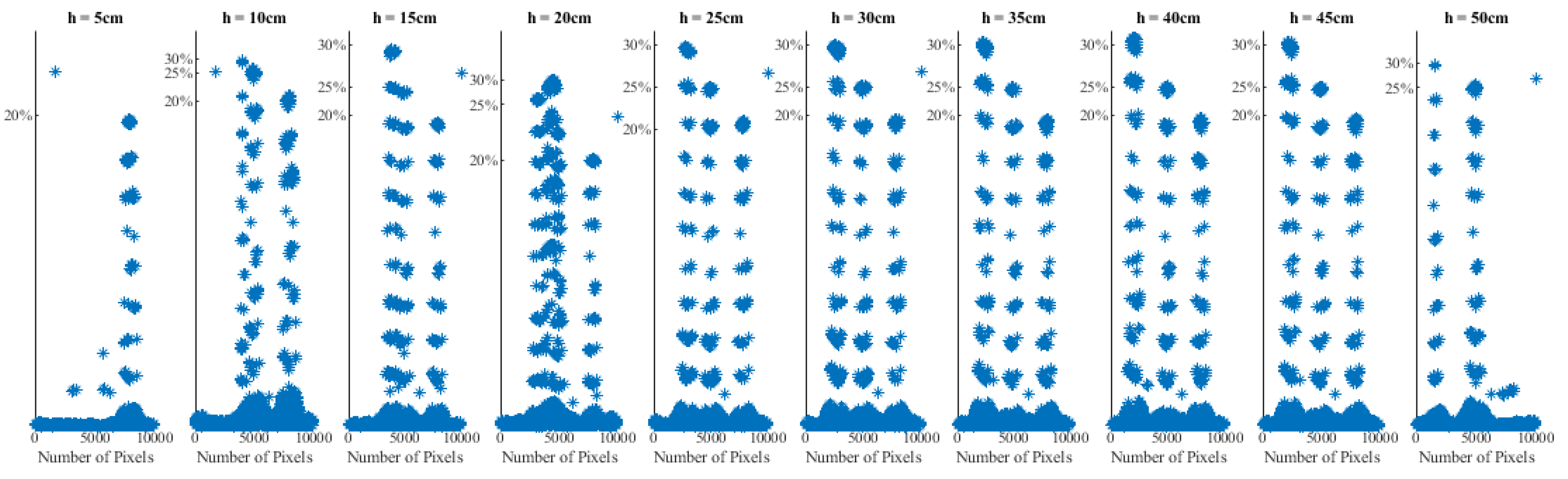
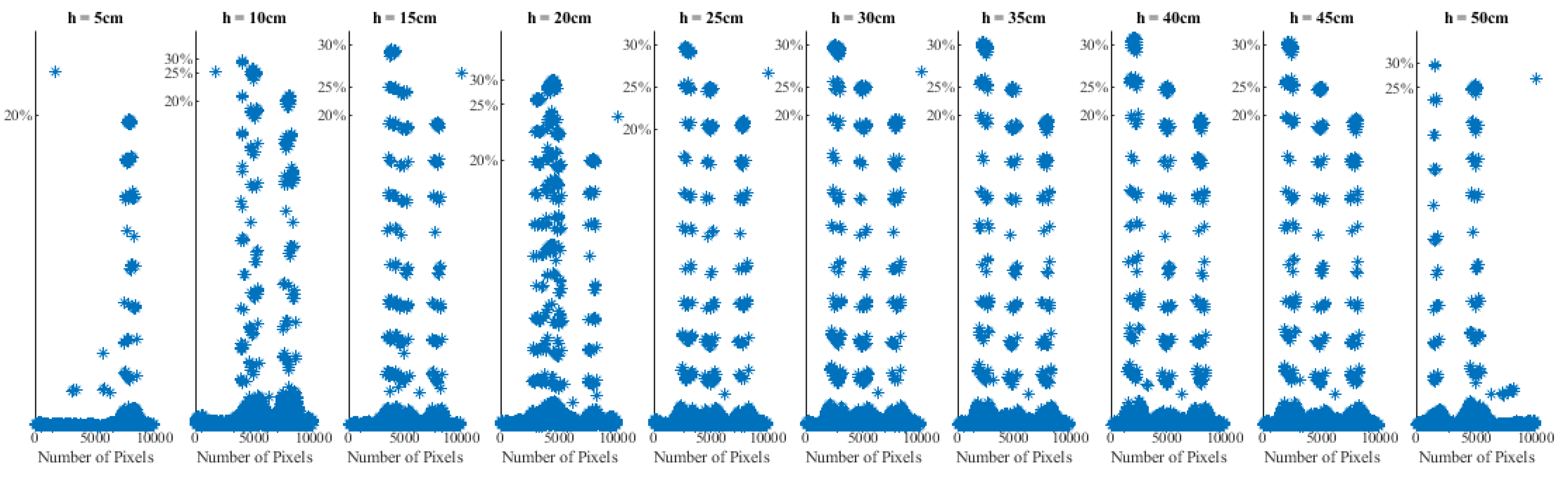
3.3. Regression Machine Learning
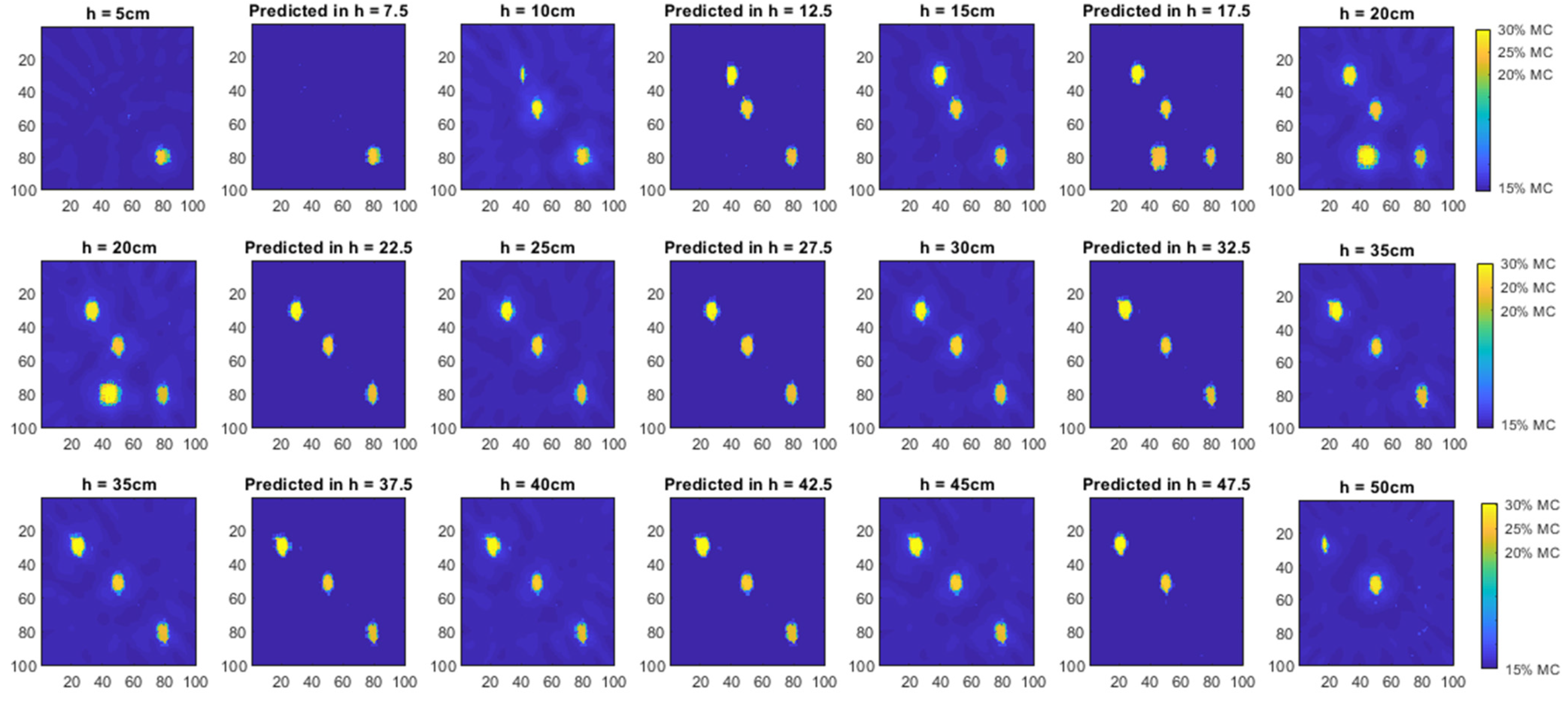
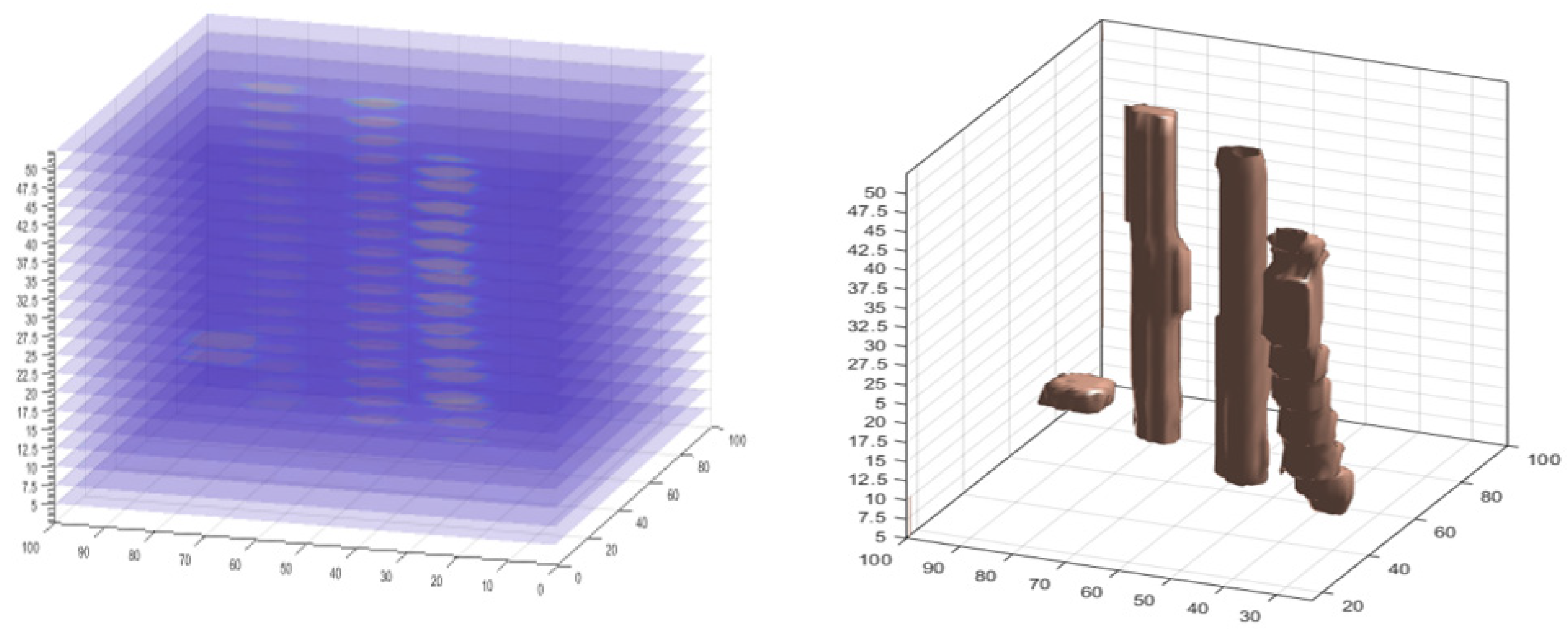
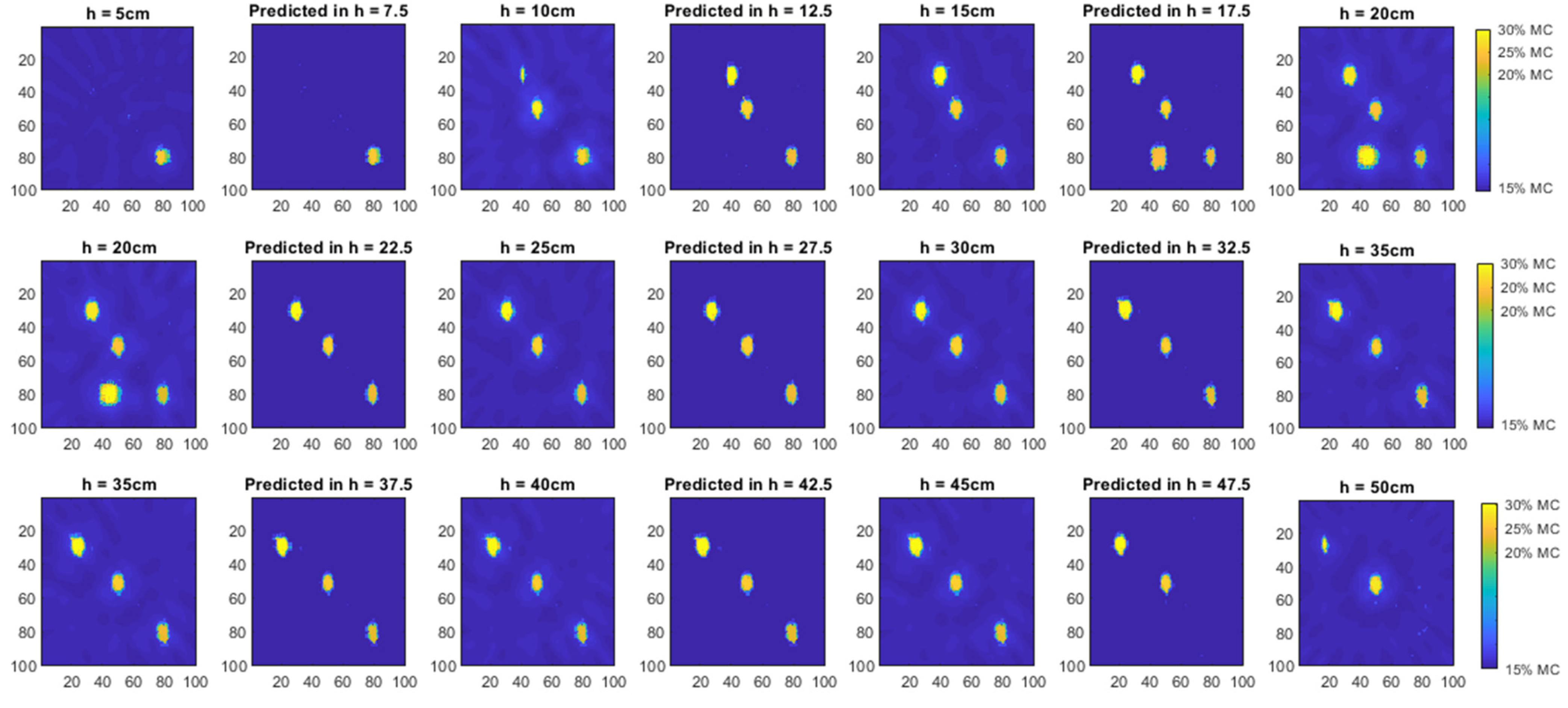
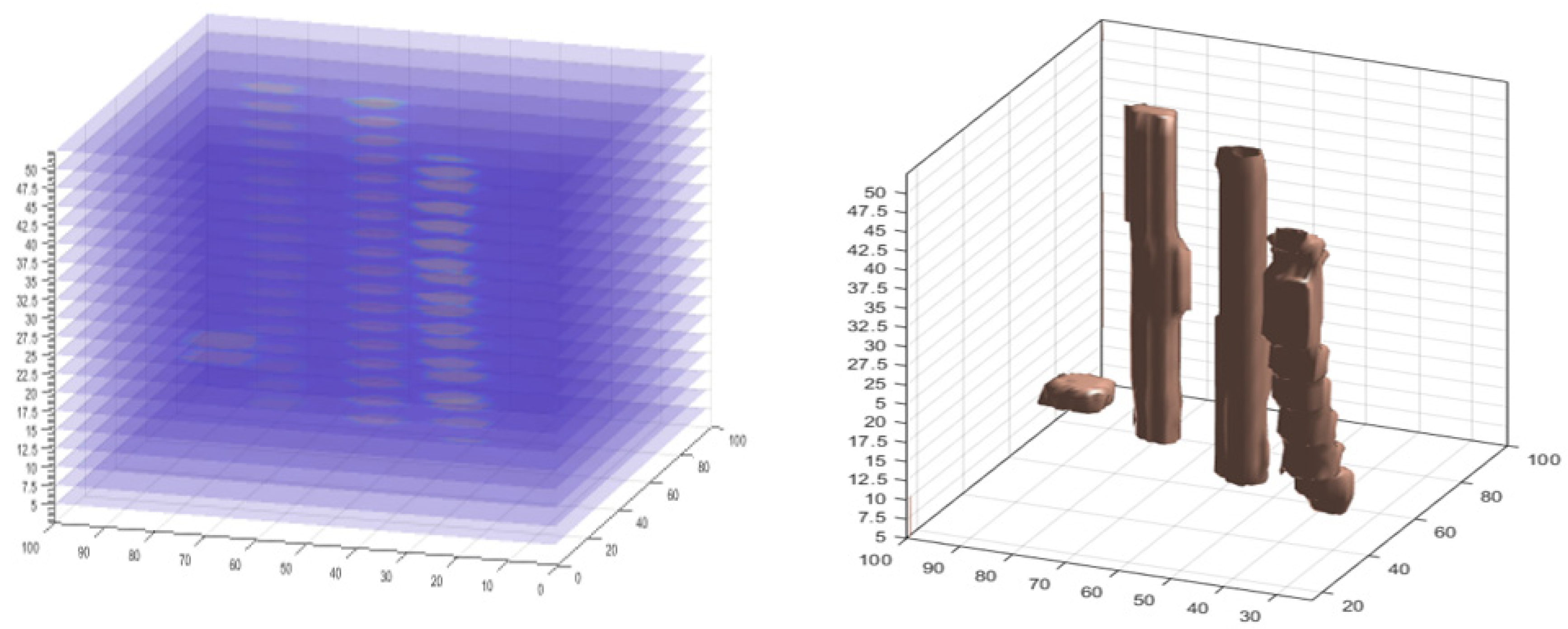
3.4. Volumetric Moisture Content
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- John, A. Rodent outbreaks and rice pre-harvest losses in Southeast Asia. Food Sec. 2014, 6, 249–260. [Google Scholar] [CrossRef]
- Nelson, S.O. Dielectric properties of agricultural products and some applications. Res. Agric. Eng. 2008, 54, 104–112. [Google Scholar] [CrossRef] [Green Version]
- Knipper, N.V. Use of High-Frequency Currents for Grain Drying. J. Agric. Eng. Res. 1959, 4, 349–360. [Google Scholar]
- Corcoran, P.T.; Stuart, O.; Nelson, L.E.S.; Corcoran, P.T.; Nelson, S.O.; Stetson, L.E.; Schlaphoff, C.W. Determining dielectric properties of grain and seed in the audiofrequency range. Trans. ASAE 1970, 13, 348–351. [Google Scholar] [CrossRef]
- Stetson, L.E.; Nelson, S.O. Audiofrequency dielectric properties of grain and seed. Trans. ASAE 1972, 15, 180–184. [Google Scholar]
- Chugh, R.K.; Stuchly, S.S.; Rzepecka, M.A. Dielectric Properties of Wheat at Microwave Frequences. Trans. ASAE 1973, 16, 906–909. [Google Scholar] [CrossRef]
- Nelson, S.O.; Russell, R.B. Models for Estimating the Dielectric Constants of Cereal Grains and Soybeans. J. Microw. Power Electromagn. Energy 1986, 21, 110–113. [Google Scholar] [CrossRef]
- Kraszewski, A.; Nelson, S.O. Composite model of the complex permittivity of cereal grain. J. Agric. Eng. Res. 1989, 43, 211–219. [Google Scholar] [CrossRef]
- Hamidisepehr, A.; Sama, M.P. Moisture content classification of soil and stalk residue samples from spectral data using machine learning. Trans. ASABE 2019, 62, 1–8. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. Radio tomographic imaging with wireless networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef] [Green Version]
- Rymarczyk, T.; Kłosowski, G.; Kozłowski, E. A non-destructive system based on electrical tomography and machine learning to analyze the moisture of buildings. Sensors 2018, 18, 2285. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaltiokallio, O.; Bocca, M.; Patwari, N. Enhancing the accuracy of radio tomographic imaging using channel diversity. In Proceedings of the 2012 IEEE 9th International Conference on Mobile Ad-Hoc and Sensor Systems (MASS 2012), Las Vegas, NV, USA, 8–11 October 2012; pp. 254–262. [Google Scholar] [CrossRef] [Green Version]
- Abo-Zahhad, M.M.; Hussein, A.I.; Mohamed, A.M. Compressive sensing algorithms for signal processing applications: A survey. Int. J. Commun. Netw. Syst. Sci. 2015, 8, 197. [Google Scholar]
- Romero, D.; Lee, D.; Giannakis, G.B. Blind radio tomography. IEEE Trans. Signal Process. 2018, 66, 2055–2069. [Google Scholar] [CrossRef]
- Ji, S.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Huang, K.; Tan, S.; Luo, Y.; Guo, X.; Wang, G. Enhanced radio tomographic imaging with heterogeneous Bayesian compressive sensing. Pervasive Mob. Comput. 2017, 40, 450–463. [Google Scholar] [CrossRef]
- Ndzi, D.L.; Harun, A.; Ramli, F.M.; Kamarudin, M.L.; Zakaria, A.; Shakaff, A.Y.M.; Jaafa, M.N.; Zhou, S.; Farook, R.S. Wireless sensor network coverage measurement and planning in mixed crop farming. Comput. Electron. Agric. 2014, 105, 83–94. [Google Scholar] [CrossRef] [Green Version]
- Kibar, H.; Öztürk, T.; Esen, B. The effect of moisture content on physical and mechanical properties of rice (Oryza sativa L.). Span. J. Agric. Res. 2010, 3, 741–749. [Google Scholar] [CrossRef] [Green Version]
- Azmi, N.; Munirah, L.; Mohamed, L.; Abdul Latiff, N.A.; Zakaria, A.; Fazalul Rahiman, M.H. Influence of Moisture Content in Rice on Radio Signal Strength Indicator Readings at 2.4 GHz. In Proceedings of the 2019 IEEE International Conference on Sensors and Nanotechnology, Penang, Malaysia, 24–25 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Azmi, N.; Kamarudin, L.M.; Zakaria, A.; Ndzi, D.L.; Rahiman, M.H.F.; Syed Zakaria, S.M.M.; Mohamed, L. RF-based moisture content determination in rice using machine learning techniques. Sensors 2021, 21, 1875. [Google Scholar] [CrossRef]
- Ramli, N.A.M.; Rahiman, M.H.F.; Kamarudin, L.M.; Zakaria, A.; Mohamed, L. A review on frequency selection in grain moisture content detection. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 705. [Google Scholar] [CrossRef]
- Chiu, C.Y.; Dujovne, D. Experimental characterization of radio tomographic imaging using Tikhonov’s regularization. In Proceedings of the 2014 IEEE Biennial Congress of Argentina (ARGENCON), Bariloche, Argentina, 11–13 June 2014; pp. 468–472. [Google Scholar] [CrossRef]
- Moisture Content Calculations—IRRI Rice Knowledge Bank. Available online: http://www.knowledgebank.irri.org/step-by-step-production/postharvest/harvesting/measuring-moisture-content/moisture-content-calculations (accessed on 15 January 2020).
- Komabayashi, T.; Zhu, Q.; Jiang, J.; Safavi, K.E.; Spångberg, L.S.W. A rapid nondestructive method for root dentin moisture measurements: In vitro pilot study. Oral Surg. Oral Med. Oral Pathol. Oral Radiol. Endodontol. 2009, 107, e107-11. [Google Scholar] [CrossRef] [Green Version]
- APLMF. APLMF Guide Document on Rice Moisture Measurement; APLMF: Sepang, Malaysia, 2017; pp. 1–62. [Google Scholar]
- Bocca, M.; Kaltiokallio, O.; Patwari, N.; Venkatasubramanian, S. Multiple target tracking with rf sensor networks. IEEE Trans. Mob. Comput. 2014, 13, 1787–1800. [Google Scholar] [CrossRef] [Green Version]
- Trabelsi, S.; Kraszewski, A.W.; Nelson, S.O. New Calibration Technique for Microwave Moisture Sensors. IEEE Trans. Instrum. Meas. 2001, 50, 877–881. [Google Scholar] [CrossRef]
- Kraszewski, A.W.; Trabelsi, S.; Nelson, S.O. Comparison of Density-independent Expressions for Moisture Content Determination in Wheat at Microwave Frequencies. J. Agric. Eng. Res. 1998, 71, 227–237. [Google Scholar] [CrossRef] [Green Version]
- Jafari, M.; Chegini, G.; Rezaeealam, B.; Akmal, A.A.S. Experimental determination of the dielectic constant of wheat grain and cluster straw in different moisture contents. Food Sci. Nutr. 2020, 8, 629–635. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.-B.; Kim, J.-H.; Lee, S.S.; Noh, S.H. Measurement of Grain Moisture Content Using Microwave Attenuation at 10.5 GHz and Moisture Density. IEEE Trans. Instrum. Meas. 2002, 51, 72–77. [Google Scholar]
- Trabelsi, S.; Kraszewski, A.W.; Nelson, S.O. Simultaneous determination of density and water content of particulate materials by microwave sensors. Electron. Lett. 1997, 33, 874–876. [Google Scholar] [CrossRef]
- Kraszewski, A.W.; Nelson, S.O. Density-Independent Moisture Determination in Wheat by Microwave Measurements, Transactions of the ASAE. Am. Soc. Agric. Eng. 1991, 34, 1176–1783. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N.; Vasquez, F.G. Regularization Methods for Radio Tomographic Imaging. In 2009 Virginia Tech Symposium on Wireless Personal Communications; Citeseer: Princeton, NJ, USA, 2009. [Google Scholar]
- Niroshan, L.; Dharmadasa, I.; Edirisinghe, S.; Suduwella, C.; Sayakkara, A.; Keppitiyagama, C.; De Zoysa, K. Enhancing the Accuracy of Wi-Fi Tomographic Imaging Using a Human-Interference Model. In Proceedings of the 18th International Conference on Advances in ICT for Emerging Regions (ICTer), Colombo, Sri Lanka, 26–29 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhao, Y.; Patwari, N. Robust Estimators for Variance-Based Device-Free Localization and Tracking. IEEE Trans. Mob. Comput. 2015, 14, 2116–2129. [Google Scholar] [CrossRef]
- Patwari, N.; Agrawal, P. Effects of correlated shadowing: Connectivity, localization, and RF tomography. In Proceedings of the 2008 International Conference on Information Processing in Sensor Networks (ipsn 2008), St. Louis, MO, USA, 22–24 April 2008; pp. 82–93. [Google Scholar] [CrossRef] [Green Version]
- Park, S.H.; Yu, H.S.; Kim, K.D.; Lee, K.J.; Baik, H.S. A proposal for a new analysis of craniofacial morphology by 3-dimensional computed tomography. Am. J. Orthod. Dentofac. Orthop. 2006, 129, 600.e23–600.e34. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Lambrichts, I.; Sun, Y.; Denis, K.; Hassan, B.; Li, L.; Pauwels, R.; Jacobs, R. A comparative evaluation of Cone Beam Computed Tomography (CBCT) and Multi-Slice CT (MSCT). Part II: On 3D model accuracy. Eur. J. Radiol. 2010, 75, 270–274. [Google Scholar] [CrossRef]
- Witowski, J.; Wake, N.; Grochowska, A.; Sun, Z.; Budzyński, A.; Major, P.; Popiela, T.J.; Pędziwiatr, M. Investigating accuracy of 3D printed liver models with computed tomography. Quant. Imaging Med. Surg. 2019, 9, 43–52. [Google Scholar] [CrossRef] [PubMed]
- Sieber, D.; Erfurt, P.; John, S.; Ribeiro Dos Santos, G.; Schurzig, D.; Sølvsten Sørensen, M.; Lenarz, T. Data Descriptor: The OpenEar library of 3D models of the human temporal bone based on computed tomography and micro-slicing Background & Summary. Sci. Data 2019. [Google Scholar] [CrossRef]
- Zhao, Y.; Patwari, N. An experimental comparison of radio transceiver and transceiver-free localization methods. J. Sens. Actuator Netw. 2016, 5, 13. [Google Scholar] [CrossRef] [Green Version]
- Zappala, S.; Mairhofer, S.; Tracy, S.; Sturrock, C.J.; Bennett, M.; Pridmore, T.; Mooney, S.J. Quantifying the effect of soil moisture content on segmenting root system architecture in X-ray computed tomography images. Plant Soil 2013, 370, 35–45. [Google Scholar] [CrossRef]
- Asefi, M.; Gilmore, C.; Jeffrey, I.; LoVetri, J.; Paliwal, J. Detection and continuous monitoring of localised high-moisture regions in a full-scale grain storage bin using electromagnetic imaging. Biosyst. Eng. 2017, 163, 37–49. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample (A) 20% MC | Sample (B) 25% MC | Sample (C) 30% MC | Sample (D) 30% MC | |
|---|---|---|---|---|
| Size (cm) | length = 40 diameter = 5 | length = 40 diameter = 5 | length = 40 diameter = 5 | length = 12 width = 12 thickness = 2 |
| Weigh (kg) | 0.65 | 0.65 | 0.65 | 0.45 |
| Added water (kg) | 0.04 | 0.086 | 0.139 | 0.096 |
| Tikhonov | LASSO | (HTL) | |
|---|---|---|---|
| Image Quality | 27% | 66% | 93% |
| RMSE | 0.14 | 0.12 | 0.08 |
| Sample (A) with 20% MC | Sample (B) with 25% MC | Sample (C) with 30% MC | Sample (D) with 30% MC | |
|---|---|---|---|---|
| Real Volume (cm3) | 785 | 785 | 785 | 288 |
| 3D Volume (cm3) | 711.03 | 729.131 | 732.87 | 241 |
| Size Quality (%) | 90.57707 | 92.88293 | 93.35924 | 83.68056 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almaleeh, A.A.; Zakaria, A.; Kamarudin, L.M.; Rahiman, M.H.F.; Ndzi, D.L.; Ismail, I. Inline 3D Volumetric Measurement of Moisture Content in Rice Using Regression-Based ML of RF Tomographic Imaging. Sensors 2022, 22, 405. https://doi.org/10.3390/s22010405
Almaleeh AA, Zakaria A, Kamarudin LM, Rahiman MHF, Ndzi DL, Ismail I. Inline 3D Volumetric Measurement of Moisture Content in Rice Using Regression-Based ML of RF Tomographic Imaging. Sensors. 2022; 22(1):405. https://doi.org/10.3390/s22010405
Chicago/Turabian StyleAlmaleeh, Abd Alazeez, Ammar Zakaria, Latifah Munirah Kamarudin, Mohd Hafiz Fazalul Rahiman, David Lorater Ndzi, and Ismahadi Ismail. 2022. "Inline 3D Volumetric Measurement of Moisture Content in Rice Using Regression-Based ML of RF Tomographic Imaging" Sensors 22, no. 1: 405. https://doi.org/10.3390/s22010405
APA StyleAlmaleeh, A. A., Zakaria, A., Kamarudin, L. M., Rahiman, M. H. F., Ndzi, D. L., & Ismail, I. (2022). Inline 3D Volumetric Measurement of Moisture Content in Rice Using Regression-Based ML of RF Tomographic Imaging. Sensors, 22(1), 405. https://doi.org/10.3390/s22010405