
Effect of Proximity, Burden, and Position on the Power Quality Accuracy Performance of Rogowski Coils





Abstract
:1. Introduction
2. Influence Quantities
2.1. Introduction
- Influence quantity, such as temperature, humidity, moisture, electromagnetic fields, pressure, altitude, burden, etc.
- Influence factor, such as the level of distortion of the measured signal (hence the quality of the source) compared to the rated, the design characteristics, etc.
2.2. Literature
2.3. Standards
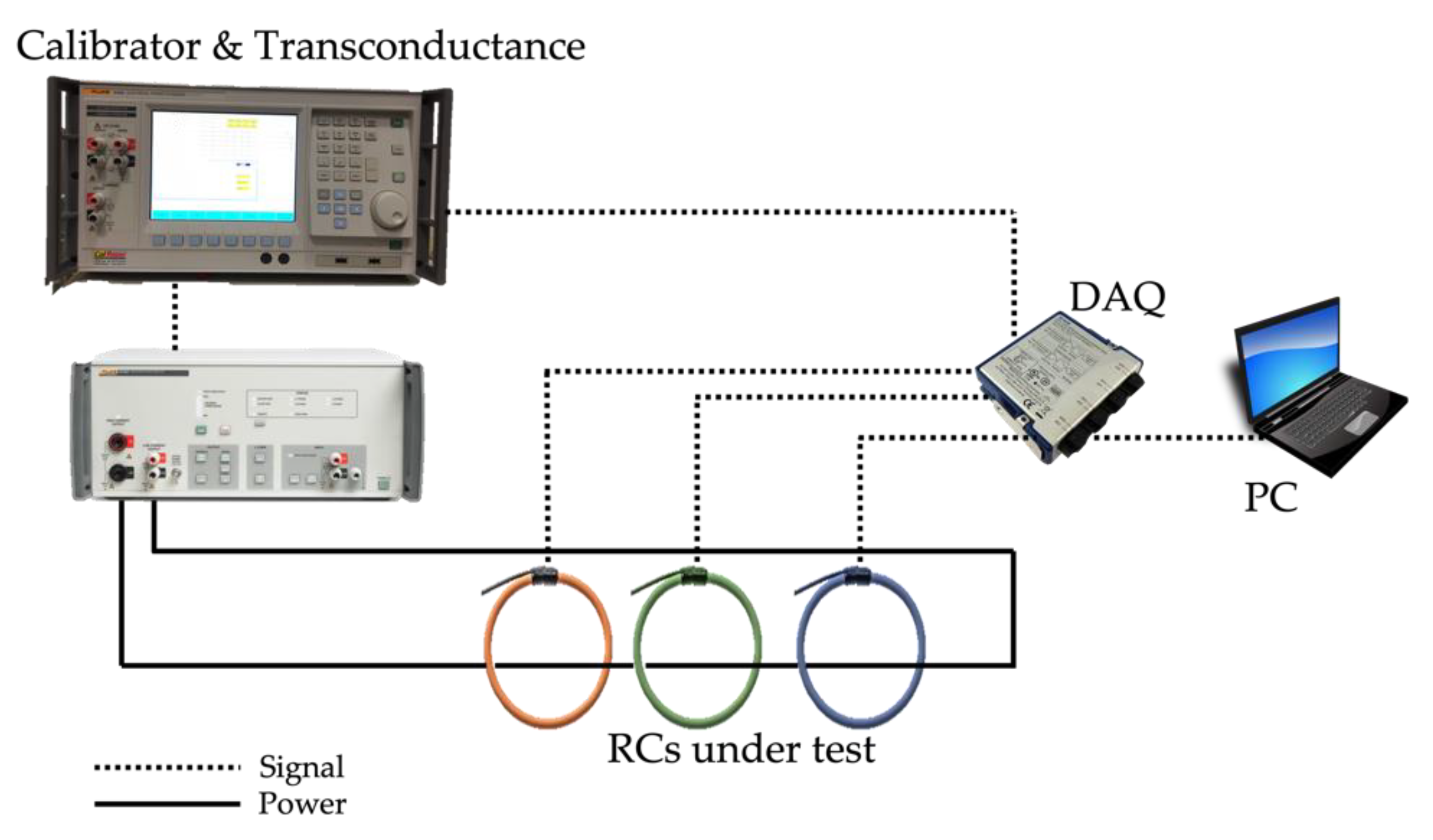
3. Measurement Setup
4. Experimental Tests
4.1. Overview
- For each test the sampling window was 200 ms, and the sampling frequency was 50 kSa/s.
- For each test 100 repetitions were performed to calculate a significant mean value.
- For each set of tests, the injected current assumed three different values: (i) a pure 50 Hz signal (referred to as signal X); (i) a 50 Hz signal with a mix of harmonics, which resulted in a THD = 4.8% (referred to as signal Y); and (iii) a 50 Hz signal with a mix of harmonics, which resulted in a THD = 9.2% (referred to as signal Z).
- For both the distorted signals, the mix of harmonics was designed according to the limits specified in [20]; hence, the included harmonics were all odd and up to the 25th. The limits in [20] hold for the voltage. However, considering both the lack of accurate standard limits for the voltage and typical power factor values, it can be assumed that those limits are reasonable even for the current.
- The amplitude of the primary current was 100 A rms for all performed tests.
- All the measurement results obtained from the tests were used to compute the ratio error and the phase displacement , which are defined as:where and are the rms of the 50 Hz component of the RC output voltage and the primary current to be measured (provided with the calibrator), respectively. is the rated transformation ratio of the RC under test. Finally, and are the phase angles of the 50 Hz component of the RC output voltage and the primary current to be measured, respectively. This procedure holds even for the distorted signals Y and Z, for which other analysis are performed, as described in what follows:
- During the results presentation the effect of proximity was included in the positioning. The reason is that the standards include this type of test among the positions in which to assess the device accuracy.
- To avoid any confusion with the values in % when subtracted among each other, the ratio error is presented in terms of its absolute value. Therefore, the results in the graphs should be multiplied by 100 to obtain the % notation.
4.2. Tests vs. Burden
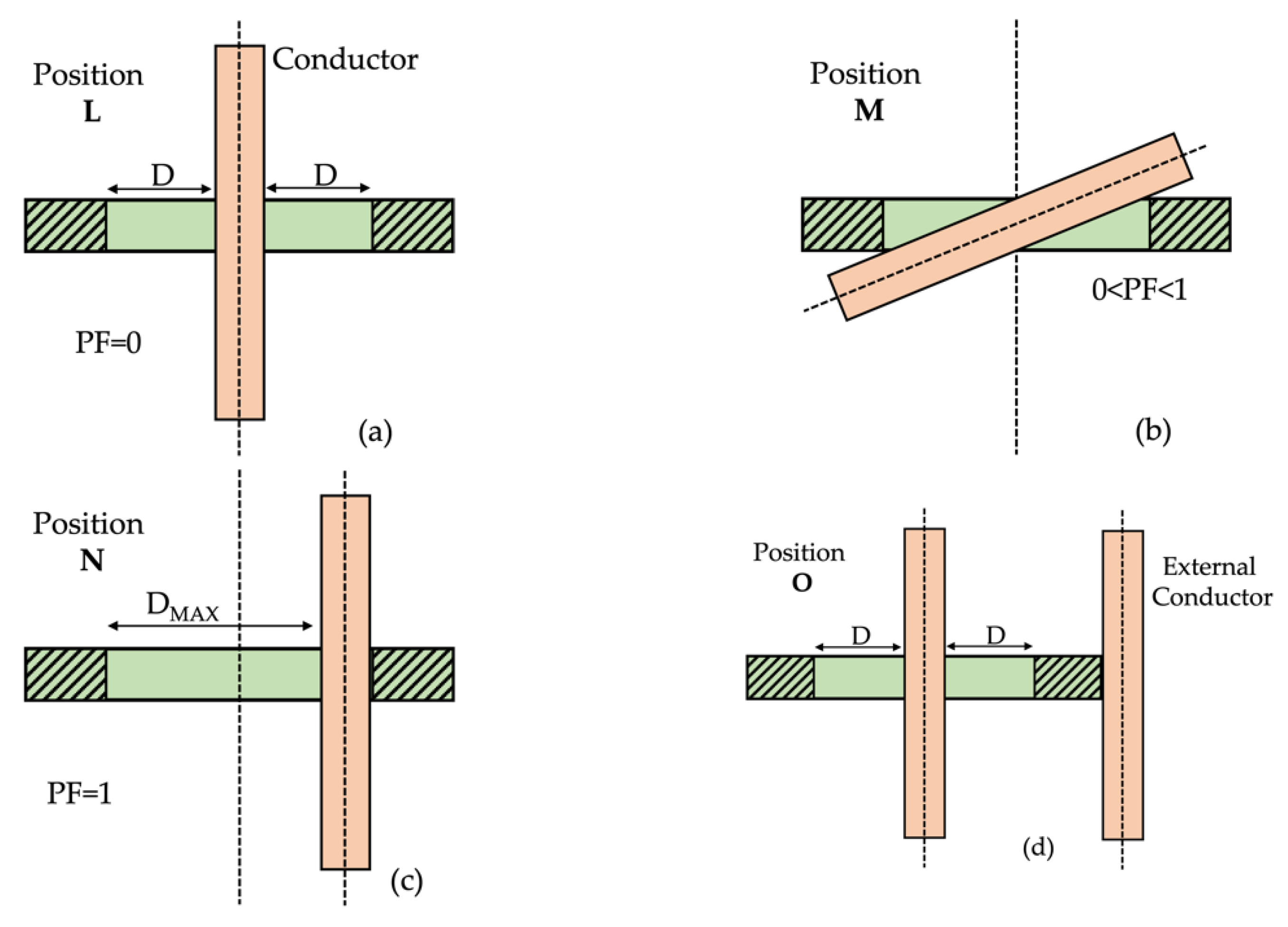
4.3. Tests vs. Position
4.4. Tests vs. Burden and Position
5. Experimental Results
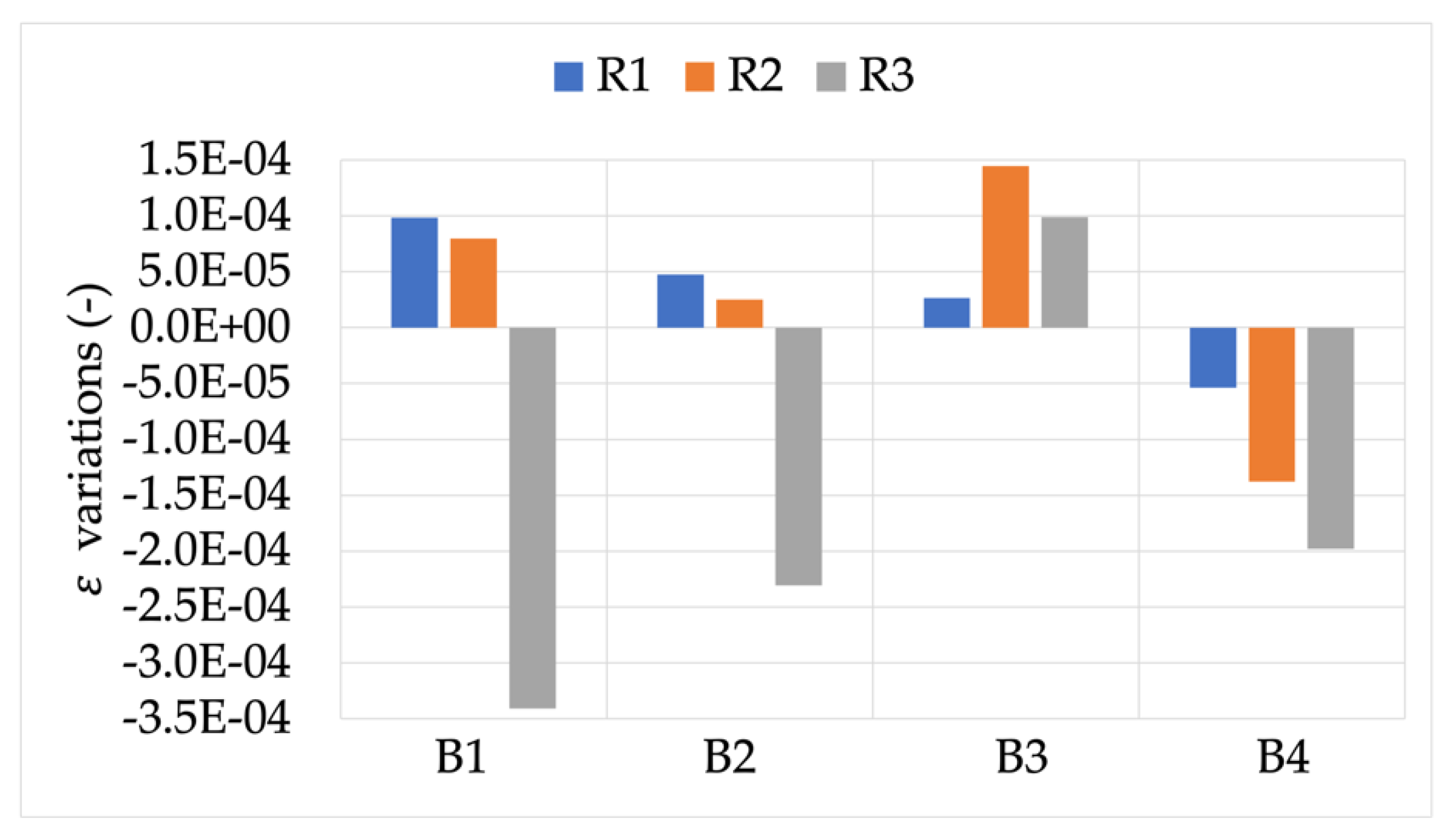
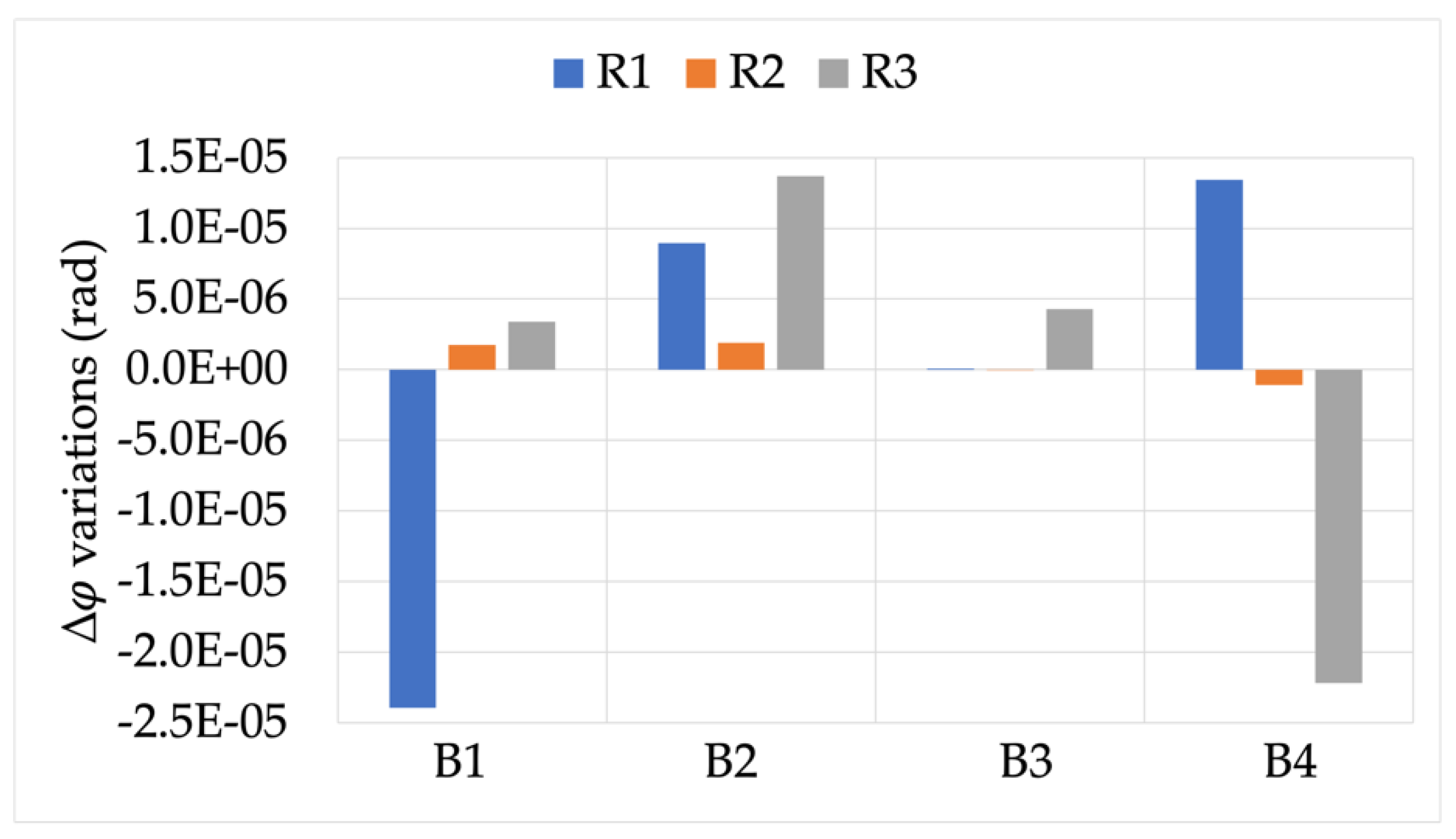
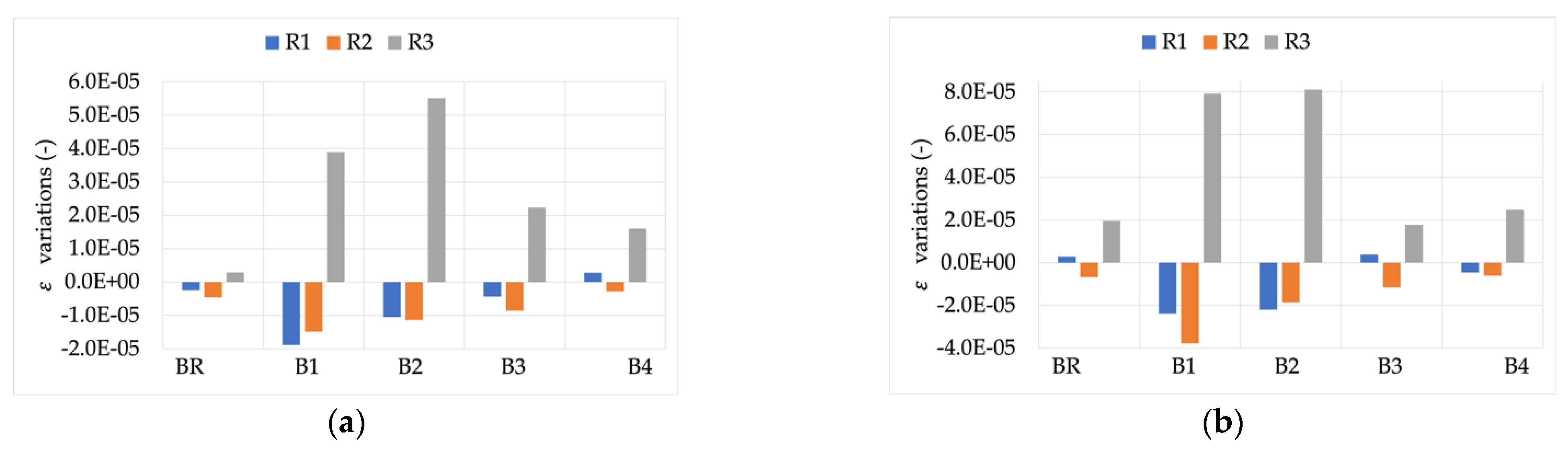
5.1. Tests vs. Burden Results
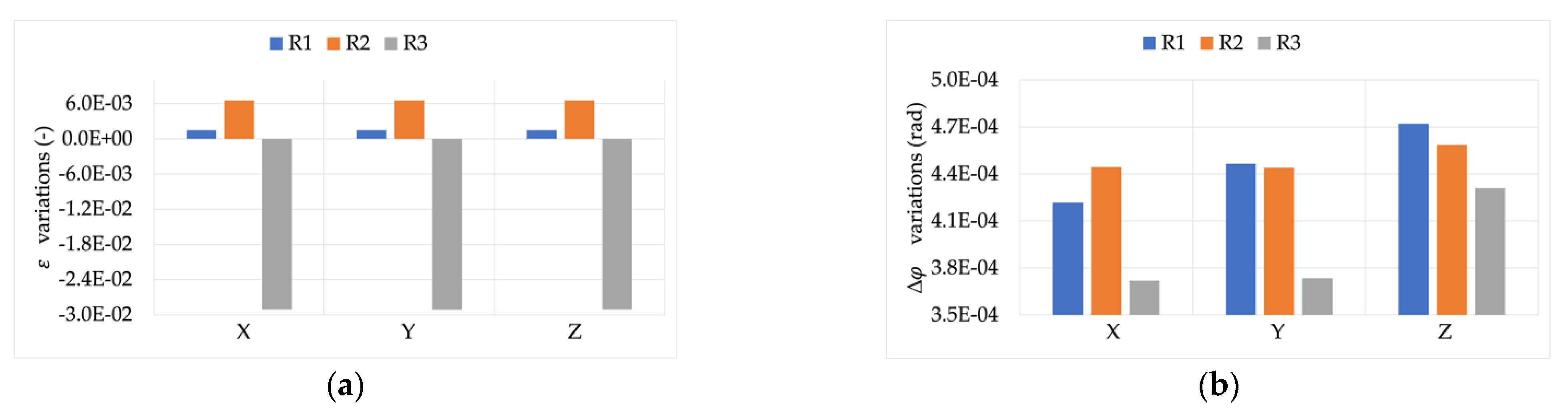
5.1.1. Signal X
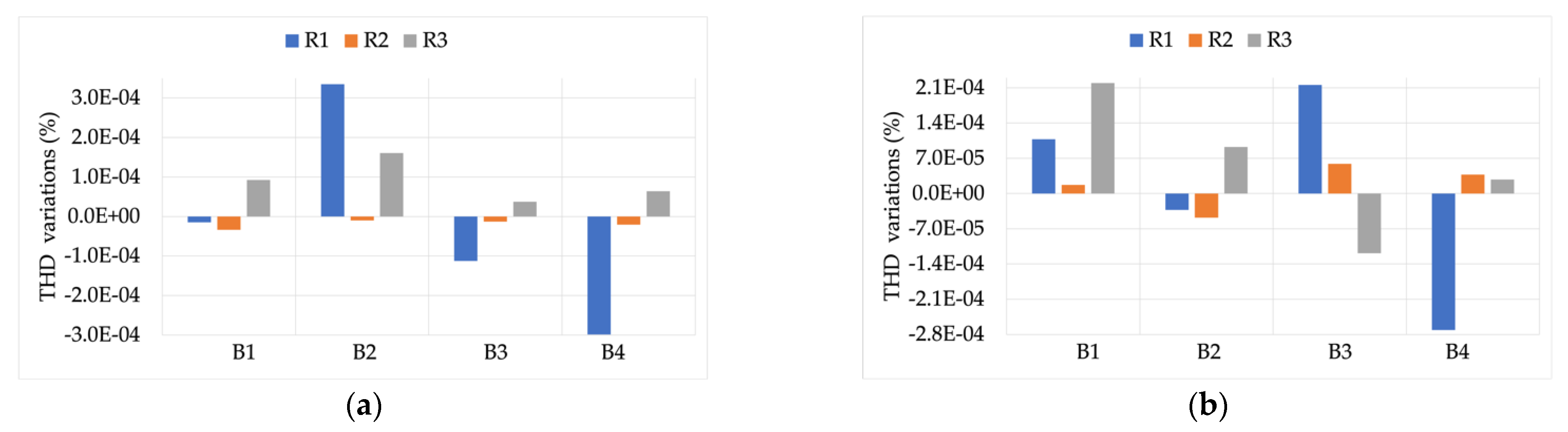
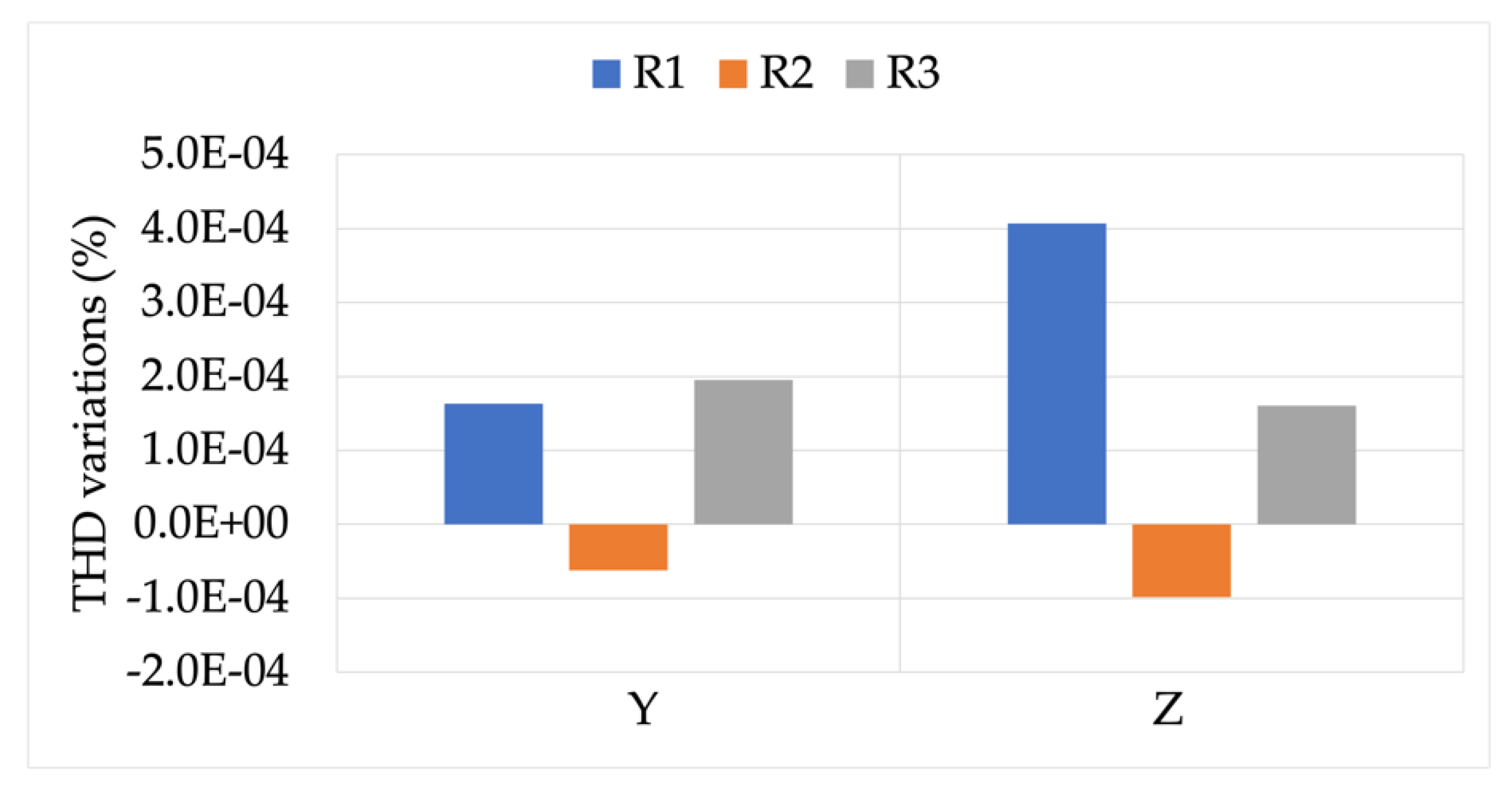
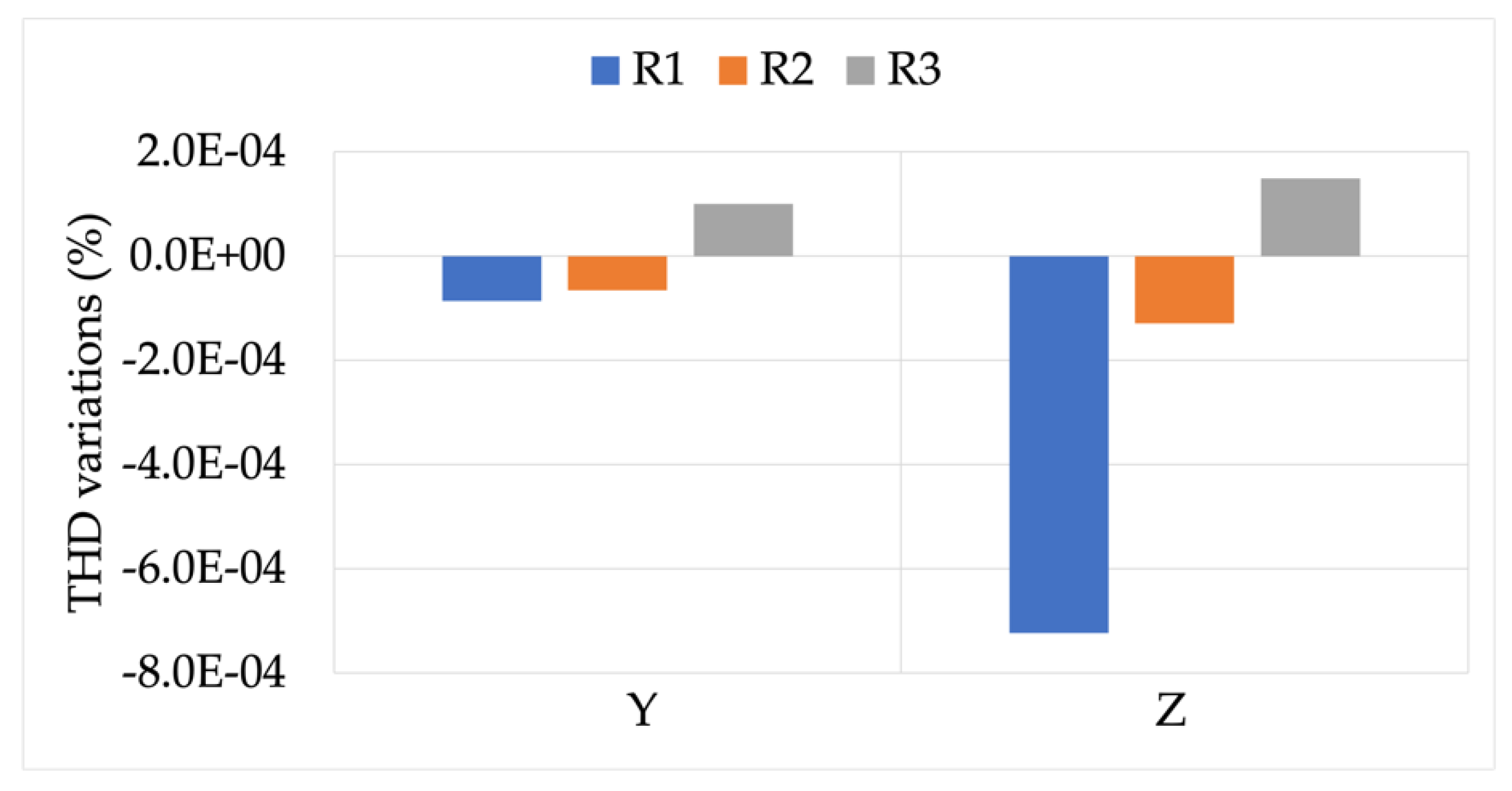
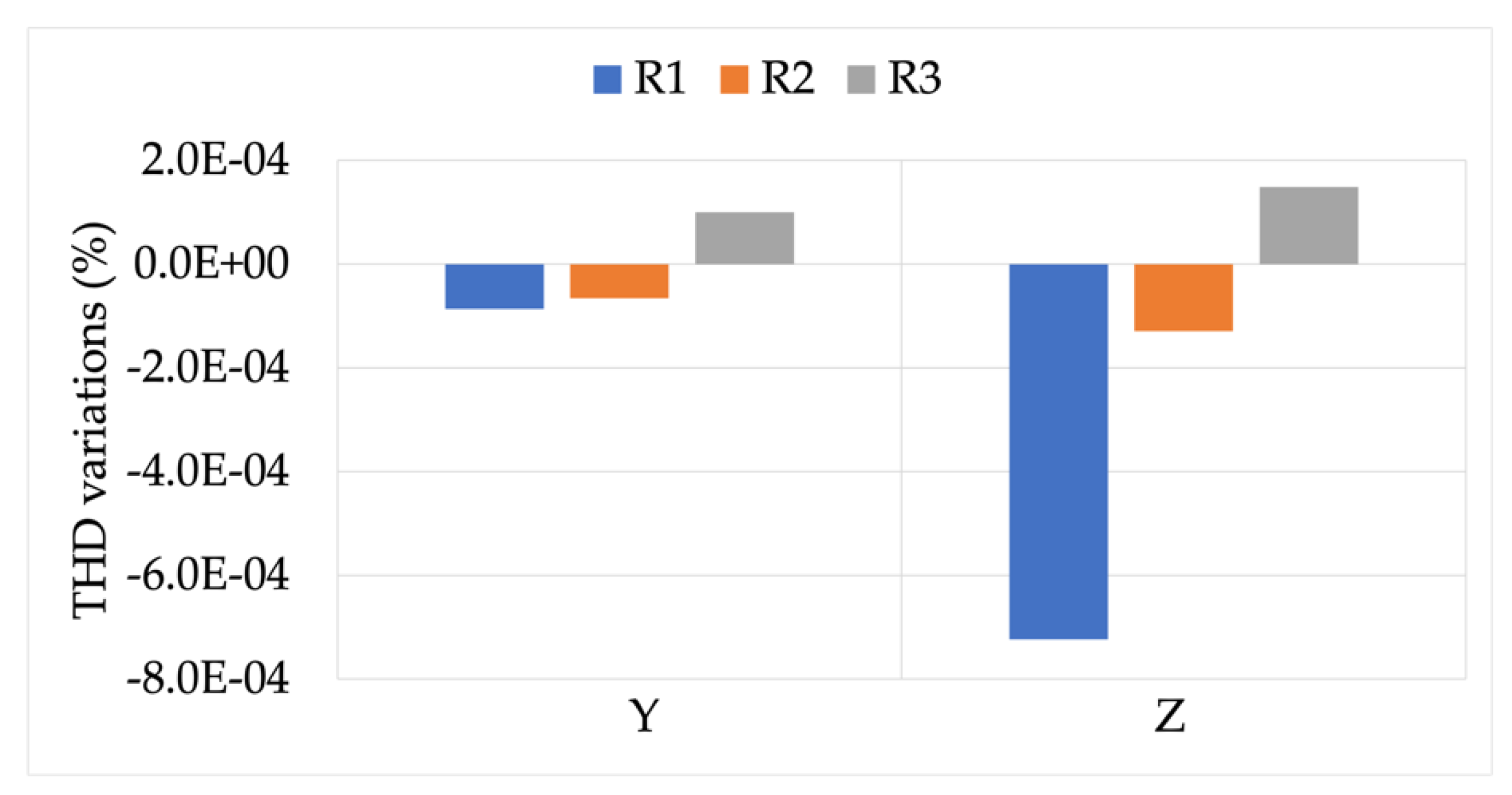
5.1.2. Signals Y and Z
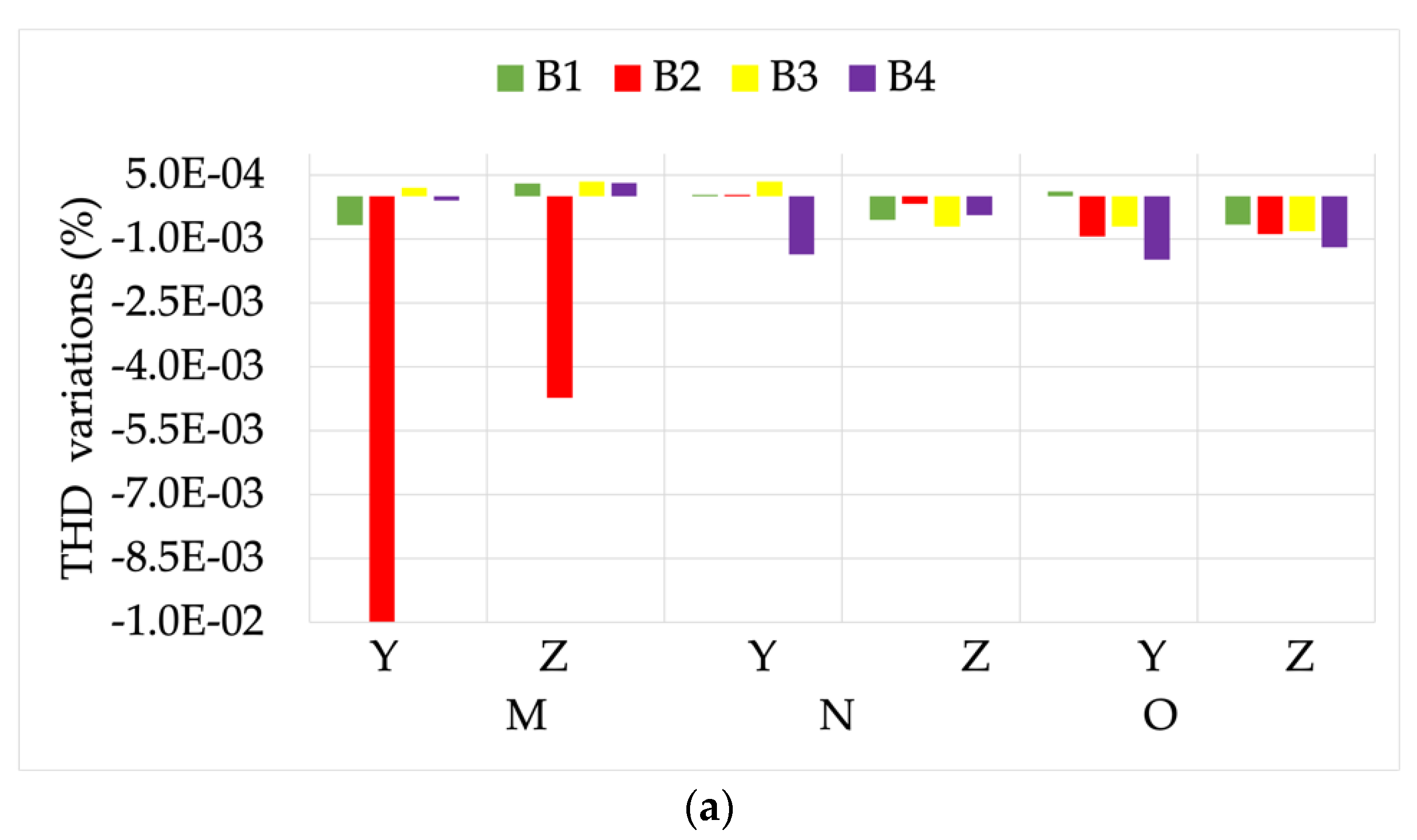
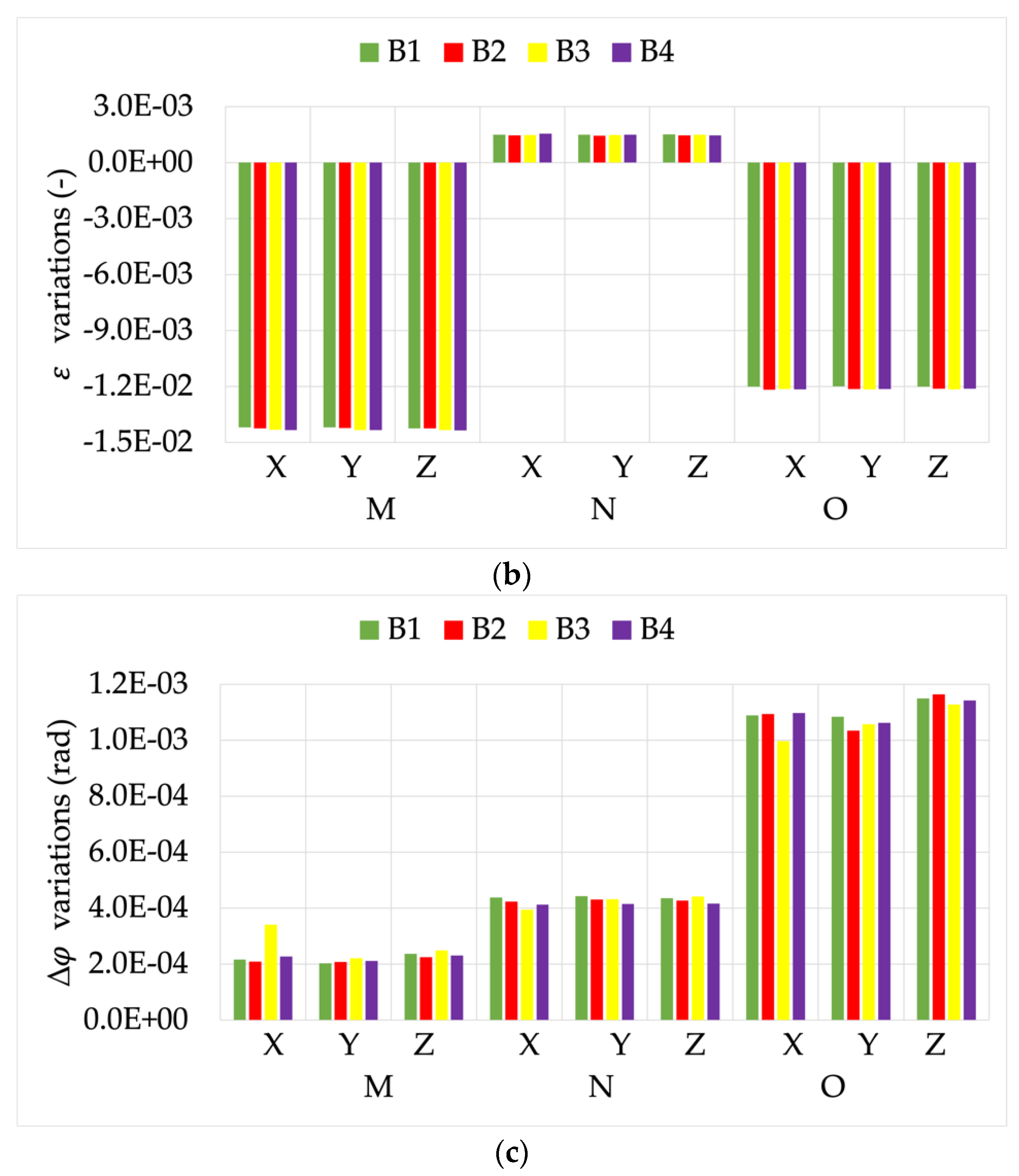
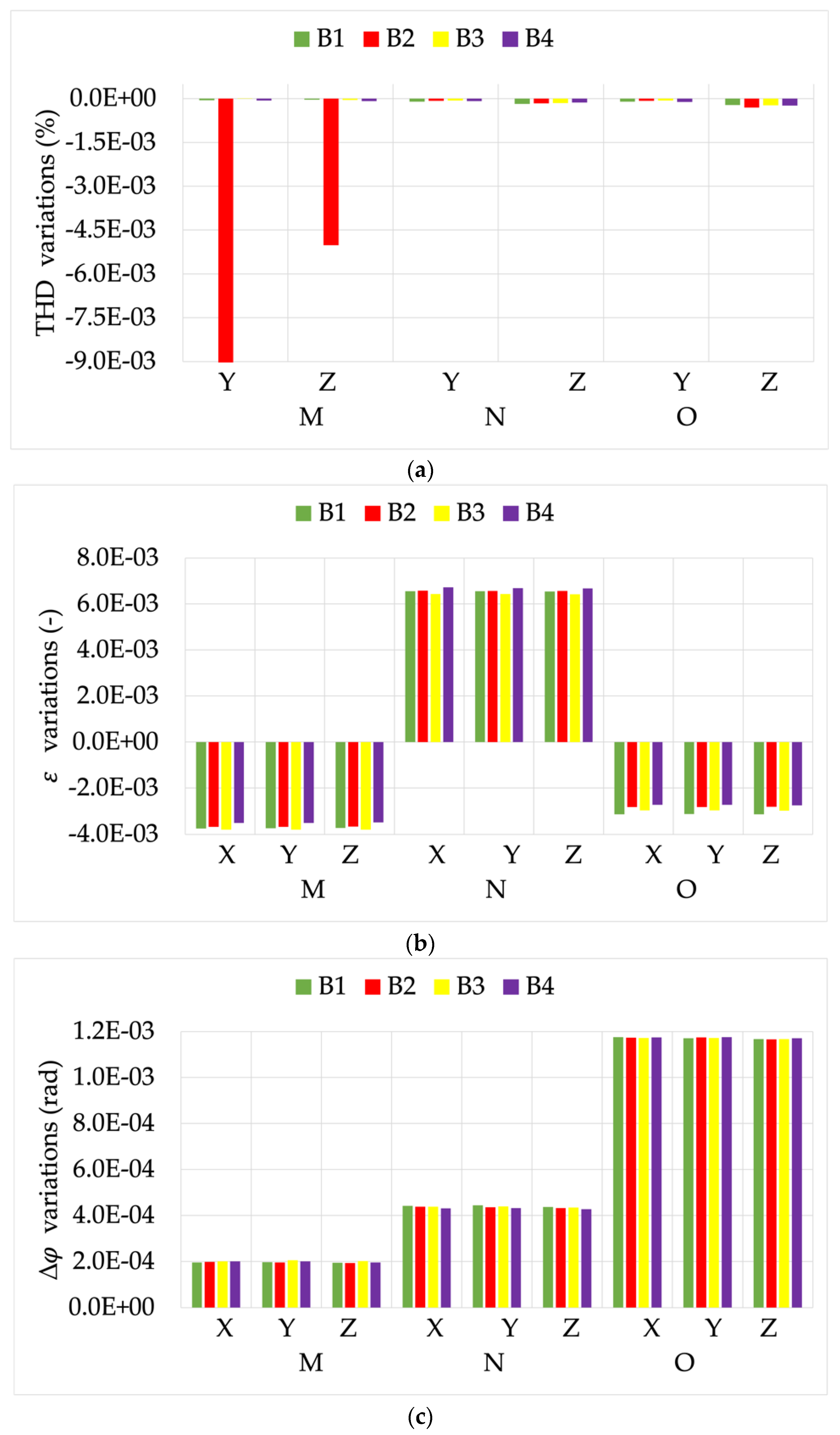
5.2. Tests vs. Position Results
5.2.1. Position M
5.2.2. Position N
5.2.3. Position O
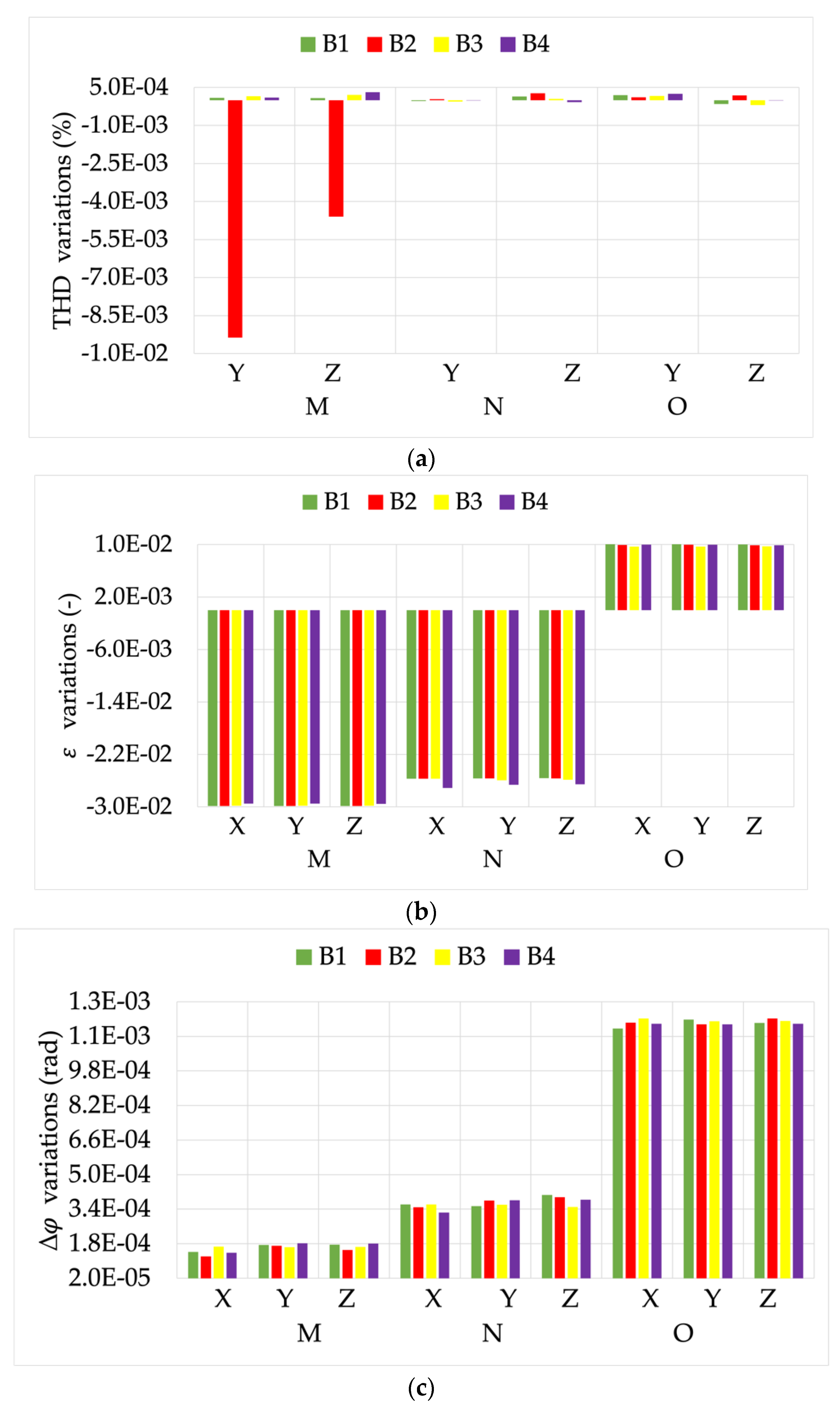
5.3. Tests vs. Burden and Position Results
- There is no unique design and manufacturing technique to produce RCs. Therefore, one cannot assume similar behavior among RCs, either for ideal or distorted conditions.
- The results obtained in the existing literature are confirmed from the new set of results, highlighting the already known criticalities in terms of accuracy.
- The effect of burden variations on RCs’ accuracy is very limited when it is evaluated alone and in presence of distorted signals. Therefore, the standard should consider loosening the requirements for RC burden.
- The presence of distortion, hence a THD 0, is not significant in most of the case for the evaluation of RC accuracy.
- The combined presence of non-rated burdens, distorted signals, and position diverse from the centered one results in behavior that is not shared among all RCs. Hence, it was worthwhile to test them to better understand the accuracy feature of the device.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chang, W.N.; Chang, C.M.; Yen, S.-K. Improvements in bidirectional power-flow balancing and electric power quality of a microgrid with unbalanced distributed generators and loads by using shunt compensators. Energies 2018, 11, 3305. [Google Scholar] [CrossRef] [Green Version]
- Moghaddam, F.A.; Kulmala, A.; Repo, S.; Azimzadeh, M.F. Managing cascade transformers equipped with on-load tap changers in bidirectional power flow environment. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Duan, N.; Huang, C.; Sun, C.; Min, L. Smart meters enabling voltage monitoring and control functionalities: The last-mile voltage stability issue. IEEE Transact. Ind. Inf. 2021, 18, 677–687. [Google Scholar] [CrossRef]
- Sanduleac, M.; Albu, M.; Martins, J.; Alacreu, M.D.; Stanescu, C. Power quality assessment in LV networks using new smart meters design. 2015. In Proceedings of the 2015 9th International Conference on Compatibility and Power Electronics, CPE 2015, Costa da Caparica, Portuga, 24-26 June 2015; pp. 106–112. [Google Scholar]
- Reid, I.E.; Stevens, H.A. Smart Meters and the Smart Grid: Privacy and Cybersecurity Considerations; Nova Science Publishers: New York, NY, USA, 2012; pp. 1–153. [Google Scholar]
- Vineeth, V.V.; Harikoushik, A.; Haripriya, P.; Harishankar, A.S.; Dharshana, C.P. Authenticated smart meter reading for a secure smart grid. J. Phys. Conf. Ser. 2016, 1916, 012212. [Google Scholar] [CrossRef]
- Ihekwaba, A.; Kim, C. Analysis of electric vehicle charging impact on grid voltage regulation. In Proceedings of the 2017 North American Power Symposium (NAPS), Morgantown, WV, USA, 17–19 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Jones, C.; Lave, M.; Vining, W.; Garcia, B. Uncontrolled Electric Vehicle Charging Impacts on Distribution Electric Power Systems with Primarily Residential, Commercial or Industrial Loads. Energies 2021, 14, 1688. [Google Scholar] [CrossRef]
- Pengxin; Zhebo, Z. Analysis of electric vehicles’ impact to the electric grid. In Proceedings of the China International Conference on Electricity Distribution, Shanghai, China, 10–14 September 2012. [Google Scholar]
- Adetokun, B.B.; Ojo, J.O.; Muriithi, C.M. Reactive Power-Voltage-Based Voltage Instability Sensitivity Indices for Power Grid With Increasing Renewable Energy Penetration. IEEE Access 2020, 8, 85401–85410. [Google Scholar] [CrossRef]
- Elsayad, N.; Shaban, K.B.; Massoud, A.; Elshatshat, R. Voltage/load Control Strategy for Smart Distribution Grids with a High Penetration of Renewable Energy Sources. Renew. Energy Power Qual. J. 2016, 441–446. [Google Scholar] [CrossRef]
- Ramljak, I. PV Plant Connection in Urban and Rural LV Grid: Comparison of Voltage Quality Results; Springer: Berlin, Germany, 2018; pp. 271–278. [Google Scholar] [CrossRef]
- Rohrig, C.; Rudion, K.; Styczynski, Z.A.; Nehrkorn, H.-J. Fulfilling the standard EN 50160 in distribution networks with a high penetration of renewable energy system. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Sanduleac, M.; Albu, M.; Stanescu, D.; Stanescu, C. Grid Storage in LV Networks—An Appropriate Solution to Avoid Network Limitations in High RES Scenarios. In Proceedings of the 2019 International Conference on Electromechanical and Energy Systems (SIELMEN), Craiova, Romania, 9–11 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mingotti, A.; Peretto, L.; Tinarelli, R. Accuracy Evaluation of an Equivalent Synchronization Method for Assessing the Time Reference in Power Networks. IEEE Trans. Instrum. Meas. 2017, 67, 600–606. [Google Scholar] [CrossRef]
- Mingotti, A.; Peretto, L.; Tinarelli, R. Uncertainty Analysis of an Equivalent Synchronization Method for Phasor Measurements. IEEE Trans. Instrum. Meas. 2018, 67, 2444–2452. [Google Scholar] [CrossRef]
- Haque, A.N.M.M.; Xiong, M.; Nguyen, P.H. Consensus algorithm for fair power curtailment of PV systems in LV networks. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia, GTD Asia, Bangkok, Thailand, 19–23 March 2019; pp. 813–818. [Google Scholar]
- Manzoni, A.; Castro, R. Microgeneration impact on LV distribution grids: A review of recent research on overvoltage mitigation techniques. Int. J. Renew. Energy Res. 2016, 6, 117–131. [Google Scholar]
- Sharma, V.; Haque, M.H.; Aziz, S.M.; Kauschke, T. Reduction of PV Curtailment through Optimally Sized Residential Battery Storage. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- EN 50160:2011. Voltage Characteristics of Electricity Supplied by Public Electricity Networks; European Committee for Standardization: Brussels, Belgium, 2017. [Google Scholar]
- Amaripadath, D.; Roche, R.; Joseph-Auguste, L.; Istrate, D.; Fortune, D.; Braun, J.P.; Gao, F. Power quality disturbances on smart grids: Overview and grid measurement configurations. In Proceedings of the 2017 52nd International Universities Power Engineering Conference, UPEC 2017, Heraklion, Greece, 28–31 August 2017. [Google Scholar]
- Sandler, R.; Brehm, M.; Slomovitz, D.; Barreto, G. Rogowski coil design for the measurement of high voltage harmonics. In Proceedings of the 2020 IEEE PES Transmission and Distribution Conference and Exhibition—Latin America, (T&D LA), Montevideo, Uruguay, 28 September–2 October 2020. [Google Scholar]
- Rane, M.G.; Shet, G.; Dwivedi, S.; Ragunath, K. Design of active integrator for rogowski coil applied in protection relay. Paper presented at the 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information and Communication Technology, RTEICT 2018-Proceedings, Bangalore, India, 18–19 May 2018; pp. 939–944. [Google Scholar]
- Solovev, D.B.; Shadrin, A.S. Instrument current transducer for measurements in asymmetrical conditions in three-phase circuits with upper harmonics. Int. J. Electr. Power Energy Syst. 2017, 84, 195–201. [Google Scholar] [CrossRef]
- Djokic, B.V. Improvements in the Performance of a Calibration System for Rogowski Coils at High Pulsed Currents. IEEE Trans. Instrum. Meas. 2016, 66, 1636–1641. [Google Scholar] [CrossRef]
- Mingotti, A.; Costa, F.; Peretto, L.; Tinarelli, R. External Magnetic Fields Effect on Harmonics Measurements with Rogowski coils. In Proceedings of the AMPS (2021), Workshop on Applied Measurements for Power System, Cagliari, Italy, 29 September–1 October 2021. [Google Scholar]
- BIPM, IEC, IFCC, ILAC, IUPAC, IUPAP, ISO, OIML. The International Vocabulary of Metrology—Basic and General Concepts and Associated Terms (VIM), 3rd ed.; JCGM: Sèvres, France, 2012. [Google Scholar]
- Li, Z.; Du, Y.; Abu-Siada, A.; Li, Z.; Zhang, T. A New Online Temperature Compensation Technique for Electronic Instrument Transformers. IEEE Access 2019, 7, 97614–97623. [Google Scholar] [CrossRef]
- Mingotti, A.; Bartolomei, L.; Peretto, L.; Tinarelli, R. On the Long-Period Accuracy Behavior of Inductive and Low-Power Instrument Transformers. Sensors 2020, 20, 5810. [Google Scholar] [CrossRef] [PubMed]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Mauri, F.; Gentilini, I. Assessment of metrological characteristics of calibration systems for accuracy vs. temperature verification of voltage transformer. In Proceedings of the AMPS 2017—IEEE International Workshop on Applied Measurements for Power Systems, Liverpool, UK, 20–22 September 2017. [Google Scholar]
- Lu, Z.; Cao, J.; Ding, J.; Yan, D. Design of an instrument for the on-line monitoring of moisture content in transformer oil based on water activity. Chin. J. Sci. Instrum. 2008, 29, 1956–1960. [Google Scholar]
- Yan, Z.H.; Ren, X.; Ren, H.; Ding, W.D. Study on Condensation of the Moisture in Current Transformers with Current Flow Considering Sharp Temperature Decrease. Appl. Mech. Mater. 2012, 241–244, 322–327. [Google Scholar] [CrossRef]
- Poljak, M.; Bojanić, B. Method for the reduction of in-service instrument transformer explosions. Eur. Trans. Electr. Power 2009, 20, 927–937. [Google Scholar] [CrossRef]
- Fan, H.; Zhu, Y.; Zheng, W.; Qin, X.; Wu, D.; Zhong, D. Research on On-line Monitoring and Regulation Technology of Pressure of High Voltage Transformer. IOP Conf. Ser. Earth Environ. Sci. 2020, 446, 042083. [Google Scholar] [CrossRef]
- Draxler, K.; Stybliková, R.; Ulvr, M. Advanced procedures for calibration of instrument transformer burdens. In Proceedings of the Proceedings—ISIE 2011: 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 983–988. [Google Scholar]
- Draxler, K.; Ulvr, M.; Styblikova, R.; Hlavacek, J. Calibration of burdens for instrument transformers. In Proceedings of the I2MTC 2020—International Instrumentation and Measurement Technology Conference, Dubrovnik, Croatia, 25–29 May 2020. [Google Scholar]
- Ma, X.; Guo, Y.; Chen, X.; Xiang, Y.; Chen, K.-L. Impact of Coreless Current Transformer Position on Current Measurement. IEEE Trans. Instrum. Meas. 2019, 68, 3801–3809. [Google Scholar] [CrossRef]
- Du, F.; Chen, W.; Zhuo, Y.; Anheuser, M. Error balance method for air core current transformer with separate coils. In Proceedings of the AMPS 2010—2010 IEEE International Conference on Applied Measurements for Power Systems, Aachen, Germany, 22–24 September 2010; pp. 18–21. [Google Scholar]
- IEC 61869-1:2010. Instrument Transformers—Part 1: General Requirements; International Standardization Organization: Geneva, Switzerland, 2010. [Google Scholar]
- IEC 61869-6. Part 6: Additional general requirements for low-power instrument transformers. In Instrument Transformers; International Standardization Organization: Geneva, Switzerland, 2016. [Google Scholar]
- IEC 61869-2:2011. Instrument Transformers—Part 2: Additional Requirements for Current Transformers; International Standardization Organization: Geneva, Switzerland, 2011. [Google Scholar]
- IEC 61869-3:2011. Instrument Transformers—Part 3: Additional Requirements for Inductive Voltage Transformers; International Standardization Organization: Geneva, Switzerland, 2011. [Google Scholar]
- IEC 61869-10. Part 10: Additional requirements for low-power passive current transformers. In Instrument Transformers; In-ternational Standardization Organization: Geneva, Switzerland, 2018. [Google Scholar]
- IEC 61869-11:2018. Instrument Transformers—Part 11: Additional Requirements for Low-Power Passive Voltage Transformers; International Standardization Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Mingotti, A.; Peretto, L.; Tinarelli, R. Effects of multiple influence quantities on rogowski-coil-type current trans-formers. IEEE Transact. Instrum. Measur. 2020, 69, 4827–4834. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Converter | 24-bit | Voltage Range | ±500 mV |
| Sampling Frequency | 50 kSa/s/Ch | Input Impedance | >1 GΩ |
| Simultaneous Channels | Yes | Gain Error | ±0.07% |
| Offset Error | ± 0.005% | Input Noise | 3.9 V |
| Name | Value (MΩ) |
|---|---|
| BR | 2 |
| B1 | 1.8 |
| B2 | 2.2 |
| B3 | 1 |
| B4 | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mingotti, A.; Costa, F.; Peretto, L.; Tinarelli, R. Effect of Proximity, Burden, and Position on the Power Quality Accuracy Performance of Rogowski Coils. Sensors 2022, 22, 397. https://doi.org/10.3390/s22010397
Mingotti A, Costa F, Peretto L, Tinarelli R. Effect of Proximity, Burden, and Position on the Power Quality Accuracy Performance of Rogowski Coils. Sensors. 2022; 22(1):397. https://doi.org/10.3390/s22010397
Chicago/Turabian StyleMingotti, Alessandro, Federica Costa, Lorenzo Peretto, and Roberto Tinarelli. 2022. "Effect of Proximity, Burden, and Position on the Power Quality Accuracy Performance of Rogowski Coils" Sensors 22, no. 1: 397. https://doi.org/10.3390/s22010397
APA StyleMingotti, A., Costa, F., Peretto, L., & Tinarelli, R. (2022). Effect of Proximity, Burden, and Position on the Power Quality Accuracy Performance of Rogowski Coils. Sensors, 22(1), 397. https://doi.org/10.3390/s22010397