
Electrical Discharges in Oil-Lubricated Rolling Contacts and Their Detection Using Electrostatic Sensing Technique


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Test Rig and Samples
2.2. Sensors and Data Acquisition Details
2.3. Testing Material
2.4. Lubricant and Additive Packages
2.5. Roughness Analysis
2.6. Calculation of Lubricant Film Thickness and Lambda
2.7. Test Matrix
3. Results
3.1. Influence of Operating Parameters on VADC
3.2. Influence of Slide-to-Roll Ratio on VADC
3.3. Influence of Supply Voltage on VADC
3.4. Quantification of Electrical Discharges
3.5. Detection of Electrical Discharges Using Electrostatic Sensing Technique
4. Discussion
4.1. Influence of Operating and Electrical Parameters on the VADC
4.2. Characteristics of Electrical Discharges
4.3. Electrical Discharges and Their Detection Using Electrostatic Sensing Technique
5. Conclusions
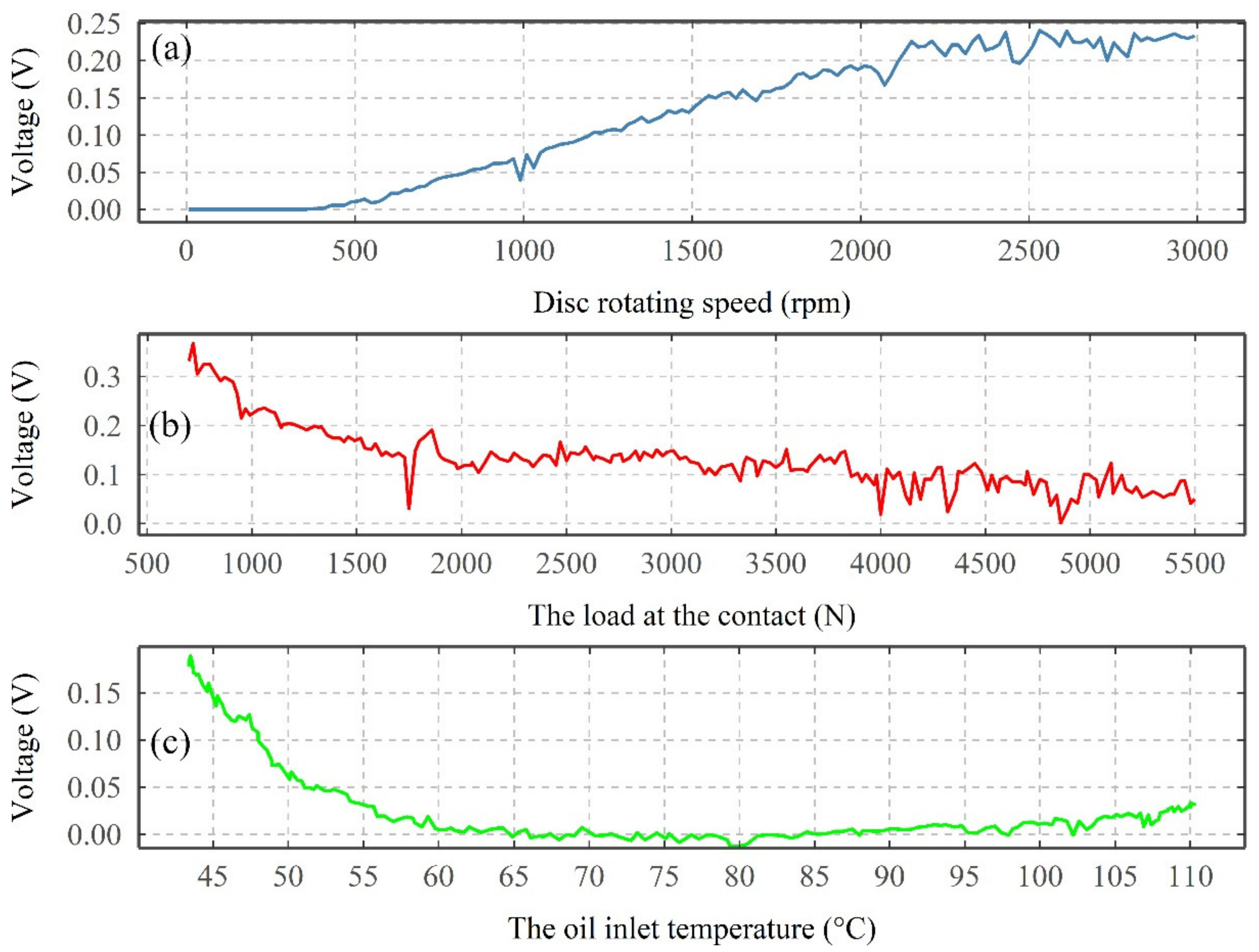
- Changing the contact conditions, e.g., load, speed, and oil temperature alters the average VADC in different ways. Increase in speed results in an increase in the VADC, while an increase in the load and oil temperature both lead to a reduction in the VADC. These changes are proposed to be driven by the change in the lubricant film thickness and contact area.
- Under all load and speed conditions, an increase of supply voltage initially leads to a rapid increase in the average VADC, until eventually reaching a plateau.
- Through high sampling rate data, it was found that operating parameters and supply voltages as well as influencing the average VADC, also influence the number and the amplitude of electrical discharges.
- Electrostatic sensors are found to detect the discharging events occurring on one of the discs (non-grounded) similar to that of the VADC. As electrostatic sensors have simple design and do not require the electronics to be embedded onto the sensors, they can be used in an oil-lubricated environment and under harsh conditions to monitor electrical discharges and diagnose WEC events.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Punga, F.; Hess, W. Eine Erscheinung an Wechsel- und Drehstromgeneratoren. Elektrotechnik und Maschinenbau 1907, 25, 615–618. [Google Scholar]
- Fleischmann, L. Ströme in Lagern und Wellen. Elektr. Kraftbetriebe Bahnen 1909, 7, 352–353. [Google Scholar]
- Alger, P.L.; Samson, H.W. Shaft currents in electric machines. Trans. Am. Inst. Electr. Eng. 1924, XLIII, 235–245. [Google Scholar] [CrossRef]
- Muetze, A.; Strangas, E.G. On inverter induced bearing currents, bearing maintenance scheduling, and prognosis. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1915–1921. [Google Scholar]
- Boyanton, H.E.; Hodges, G. Bearing fluting [motors]. IEEE Ind. Appl. Mag. 2002, 8, 53–57. [Google Scholar] [CrossRef]
- Sohre, J. Shaft riding brushes to control electric stray currents. In Proceedings of the 20th Turbomachinery Symposium, Texas A&M University, College Station, TX, USA, 17–19 September 1991; pp. 63–75. [Google Scholar]
- Ammann, C.; Reichert, K.; Joho, R.; Posedel, Z. Shaft voltages in generators with static excitation systems-problems and solution. IEEE Trans. Energy Convers. 1988, 3, 409–419. [Google Scholar] [CrossRef]
- Nippes, P.I. Early warning of developing problems in rotating Machinery as provided by monitoring shaft Voltages and grounding currents. IEEE Trans. Energy Convers. 2004, 19, 340–345. [Google Scholar] [CrossRef]
- Costello, M.J. Shaft voltages and rotating machinery. IEEE Trans. Ind. Appl. 1993, 29, 419–426. [Google Scholar] [CrossRef]
- Kerszenbaum, I. Shaft currents in electric machines fed by solid-state drives. In Proceedings of the 1992 IEEE Conference Record of the Industrial and Commercial Power Systems Technical Conference, Pittsburgh, PA, USA, 4–7 May 1992; pp. 71–79. [Google Scholar]
- Buckley, G.W.; Corkins, R.J.; Stephens, R.N. The importance of grounding brushes to the safe operation of large turbine generators. IEEE Trans. Energy Convers. 1988, 3, 607–612. [Google Scholar] [CrossRef]
- Chen, S.; Lipo, T.A.; Fitzgerald, D. Modeling of motor bearing currents in PWM inverter drives. IEEE Trans. Ind. Appl. 1996, 32, 1365–1370. [Google Scholar] [CrossRef]
- Link, P.J. Minimizing electric bearing currents in adjustable speed drive systems. In Proceedings of the Conference Record of 1998 Annual Pulp and Paper Industry Technical Conference (Cat. No.98CH36219), Portland, ME, USA, 21–26 June 1998; pp. 181–195. [Google Scholar]
- Busse, D.; Erdman, J.; Kerkman, R.J.R.; Schlegel, D.; Skibinski, G. Bearing currents and their relationship to PWM drives. IEEE Trans. Power Electron. 1997, 12, 243–252. [Google Scholar] [CrossRef] [Green Version]
- Busse, D.; Erdman, J.; Kerkman, R.J.; Schlegel, D.; Skibinski, G. The effects of PWM voltage source inverters on the mechanical performance of rolling bearings. IEEE Trans. Ind. Appl. 1997, 33, 567–576. [Google Scholar] [CrossRef]
- Erdman, J.M.; Kerkman, R.J.; Schlegel, D.W.; Skibinski, G.L. Effect of PWM inverters on AC motor bearing currents and shaft voltages. IEEE Trans. Ind. Appl. 1996, 32, 250–259. [Google Scholar] [CrossRef]
- Busse, D.; Erdman, J.; Kerkman, R.; Schlegel, D.; Skibinski, G. Characteristics of shaft voltage and bearing currents. IEEE Ind. Appl. Mag. 1997, 3, 21–32. [Google Scholar] [CrossRef]
- Plazenet, T.; Boileau, T.; Caironi, C.; Nahid-Mobarakeh, B. An overview of shaft voltages and bearing currents in rotating machines. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016; pp. 1–8. [Google Scholar]
- Loos, J.; Bergmann, I.; Goss, M. Influence of currents from electrostatic charges on WEC formation in rolling bearings. Tribol. Trans. 2015, 59, 865–875. [Google Scholar] [CrossRef]
- Esmaeili, K.; Zuercher, M.; Wang, L.; Harvey, T.; Holweger, W.; White, N.; Schlücker, E. A study of white etching crack bearing failure detection using electrostatic sensing in wind turbine gearboxes. Int. J. Cond. Monit. 2018, 8, 82–88. [Google Scholar] [CrossRef]
- Zuercher, M.; Heinzler, V.; Schlücker, E.; Esmaeili, K.; Harvey, T.J.J.; Holweger, W.; Wang, L. Early failure detection for bearings in electrical environments. Int. J. Cond. Monit. 2018, 8, 24–29. [Google Scholar] [CrossRef]
- Holweger, W.; Wolf, M.; Merk, D.; Blass, T.; Goss, M.; Loos, J.; Barteldes, S.; Jakovics, A. White etching crack root cause investigations. Tribol. Trans. 2015, 58, 59–69. [Google Scholar] [CrossRef]
- Tasbaz, O.D.; Wood, R.J.K.; Browne, M.; Powrie, H.E.G.; Denuault, G. Electrostatic monitoring of oil lubricated sliding point contacts for early detection of scuffing. Wear 1999, 230, 86–97. [Google Scholar] [CrossRef]
- Craig, M.; Harvey, T.J.; Wood, R.J.K.; Masuda, K.; Kawabata, M.; Powrie, H.E.G. Advanced condition monitoring of tapered roller bearings, Part 1. Tribol. Int. 2009, 42, 1846–1856. [Google Scholar] [CrossRef]
- ASTM 52100 Bearing Steel. Available online: http://www.astmsteel.com/product/52100-bearing-steel-aisi/ (accessed on 10 October 2021).
- Züllich, J. Untersuchungen zur Entstehung von White Etching Cracks in Kugellagern im Zusammenhang mit der Additivierung von Schmierstoffen. Master’s Thesis, Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen, Germany, 2016. [Google Scholar]
- Hamrock, B.J.; Dowson, D. Ball Bearing Lubrication: The Elastohydrodynamics of Elliptical Contacts; John Wiley Sons: New York, NY, USA, 1981. [Google Scholar]
- Hamrock, B.J.; Dowson, D. Isothermal Elastohydrodynamic Lubrication of Point Contacts: Part III—Fully Flooded Results. J. Lubr. Technol. 1977, 99, 264–275. [Google Scholar] [CrossRef]
- Prashad, H. Tribology in Electrical Environments, 1st ed.; Elsevier: Oxford, UK, 2005; ISBN 0080521584. [Google Scholar]
- Shimizu, Y.; Spikes, H.A. The influence of slide–roll ratio on ZDDP tribofilm formation. Tribol. Lett. 2016, 64, 19. [Google Scholar] [CrossRef] [Green Version]
- Spikes, H. The history and mechanisms of ZDDP. Tribol. Lett. 2004, 17, 469–489. [Google Scholar] [CrossRef]
- Georges, J.M.; Martin, J.M.; Mathia, T.; Kapsa, P.; Meille, G.; Montes, H. Mechanism of boundary lubrication with zinc dithiophosphate. Wear 1979, 53, 9–34. [Google Scholar] [CrossRef]
- Harvey, T.J.; Wood, R.J.K.; Denuault, G.; Powrie, H.E.G. Investigation of electrostatic charging mechanisms in oil lubricated tribo-contacts. Tribol. Int. 2002, 35, 605–614. [Google Scholar] [CrossRef]
- Zuercher, M. Influence of Operating Parameters on WEC Formation; University of Southampton: Southampton, UK, 27 January 2016. [Google Scholar]
- Grimm, S. Theoretische und Praktische Untersuchungen zum Durchschlagsverhalten Ölisolierter Elektrodenanordnungen. Master’s Thesis, University of Karlsruhe, Karlsruhe, Germany, 1992. [Google Scholar]
- Suresh, K.K.S. Electric Circuits and Networks (for Gtu); Pearson Education India: New Delhi, India, 2010; ISBN 8131755118. [Google Scholar]
- Komatsuzaki, S.; Uematsu, T.; Nakano, F. Bearing damage by electrical wear and its effect on deterioration of lubricating greases. Lubr. Eng. 1987, 43, 25–30. [Google Scholar]
- Xie, G.; Guo, D.; Luo, J. Lubrication under charged conditions. Tribol. Int. 2015, 84, 22–35. [Google Scholar] [CrossRef]
- Eschmann, P.; Hasbargen, L.; Weigand, K.; Brändlein, J. Ball and Roller Bearings: Theory, Design, and Application; John Wiley Sons: New York, NY, USA, 1985. [Google Scholar]
- Stachowiak, G.W.; Batchelor, A.W. Engineering Tribology, 4th ed.; Elsevier: Oxford, UK, 2013; ISBN 9780123977762. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Content (%) |
|---|---|
| Iron, Fe | 96.5–97.32 |
| Chromium, Cr | 1.35–1.60 |
| Carbon, C | 0.93–1.05 |
| Manganese, Mn | 0.25–0.45 |
| Silicon, Si | 0.15–0.35 |
| Sulfur, S | ≤0.015 |
| Phosphorous, P | ≤0.025 |
| Properties | Metric |
|---|---|
| Bulk modulus | 140 GPa |
| Shear modulus | 80 GPa |
| Elastic modulus | 210 GPa |
| Poisson’s ratio | 0.27–0.30 |
| Density | 7.81 g/cm3 |
| Melting point | 1424 °C |
| Properties | Value | Unit |
|---|---|---|
| Density at 15 °C | 883 | kg/m3 |
| Dielectric strength | 26.4 | kV/mm |
| Kinematic viscosity at 40 °C | 60.34 | mm2/s |
| Kinematic viscosity at 100 °C | 8.69 | mm2/s |
| Pressure–viscosity coefficient | 8 | GPa−1 |
| Influence of | Bottom Disc Speed (rpm) | Load/Contact Pressure (Max) (N/GPa) | Oil Inlet Temperature (°C) | Slide-to-Roll Ratio (%) | Supply Voltage (V) | Maximum Current (µA) |
|---|---|---|---|---|---|---|
| Disc rotating speed | 0–3000 1 | 1145/1.75 | 40 | 0 | 10 | 200 |
| Load | 3000 | 500–5570/1.3–3 2 | 40 | 0 | 10 | 200 |
| Oil temperature | 3000 | 1145/1.75 | 40–110 3 | 0 | 10 | 200 |
| Slide-to-roll ratio | 3000 | 1145/1.75 | 40 | 0–15 4 | 10 | 200 |
| supply voltage | 1500 | 1145/1.75 1720/2.00 3340/2.50 5570/3.00 | 40 | 0 | 0–15 5 | 0–300 |
| 2000 | as above | 0 | ||||
| 2500 | as above | 0 | ||||
| 3000 | as above | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Esmaeili, K.; Wang, L.; Harvey, T.J.; White, N.M.; Holweger, W. Electrical Discharges in Oil-Lubricated Rolling Contacts and Their Detection Using Electrostatic Sensing Technique. Sensors 2022, 22, 392. https://doi.org/10.3390/s22010392
Esmaeili K, Wang L, Harvey TJ, White NM, Holweger W. Electrical Discharges in Oil-Lubricated Rolling Contacts and Their Detection Using Electrostatic Sensing Technique. Sensors. 2022; 22(1):392. https://doi.org/10.3390/s22010392
Chicago/Turabian StyleEsmaeili, Kamran, Ling Wang, Terry J. Harvey, Neil M. White, and Walter Holweger. 2022. "Electrical Discharges in Oil-Lubricated Rolling Contacts and Their Detection Using Electrostatic Sensing Technique" Sensors 22, no. 1: 392. https://doi.org/10.3390/s22010392
APA StyleEsmaeili, K., Wang, L., Harvey, T. J., White, N. M., & Holweger, W. (2022). Electrical Discharges in Oil-Lubricated Rolling Contacts and Their Detection Using Electrostatic Sensing Technique. Sensors, 22(1), 392. https://doi.org/10.3390/s22010392