1. Introduction
The GeoSLAM ZEB Horizon GeoSLAM ZEB Horizon (GeoSLAM Ltd., Nottingham, UK) LiDAR scanner is a form of handheld mobile mapping system (MMS) and has been applied on many occasions, due to its compact size, cost-effectiveness, and high performance [
1]. Due to its use of the simultaneous localization and mapping (SLAM) algorithm [
1,
2,
3] with IMU (inertial measurement unit) data for positioning without using GNSS data [
4], it can avoid environmental limits and be used in narrow and winding alleys, indoors, and in other areas where GNSS signals cannot be received. Compared to the total station and terrestrial LiDAR scanner, it also demonstrates high performance in collecting terrain data in general areas, such as in non-narrow alleys. Hence, it has been employed in different fields (e.g., cultural asset preservation in ancient cities [
5], forest investigations [
4,
6,
7], mine monitoring [
1,
8], disaster site reconstruction [
9], tunnel surveying [
10], topographic surveying [
11], and the mapping of building interior structures [
5,
12]).
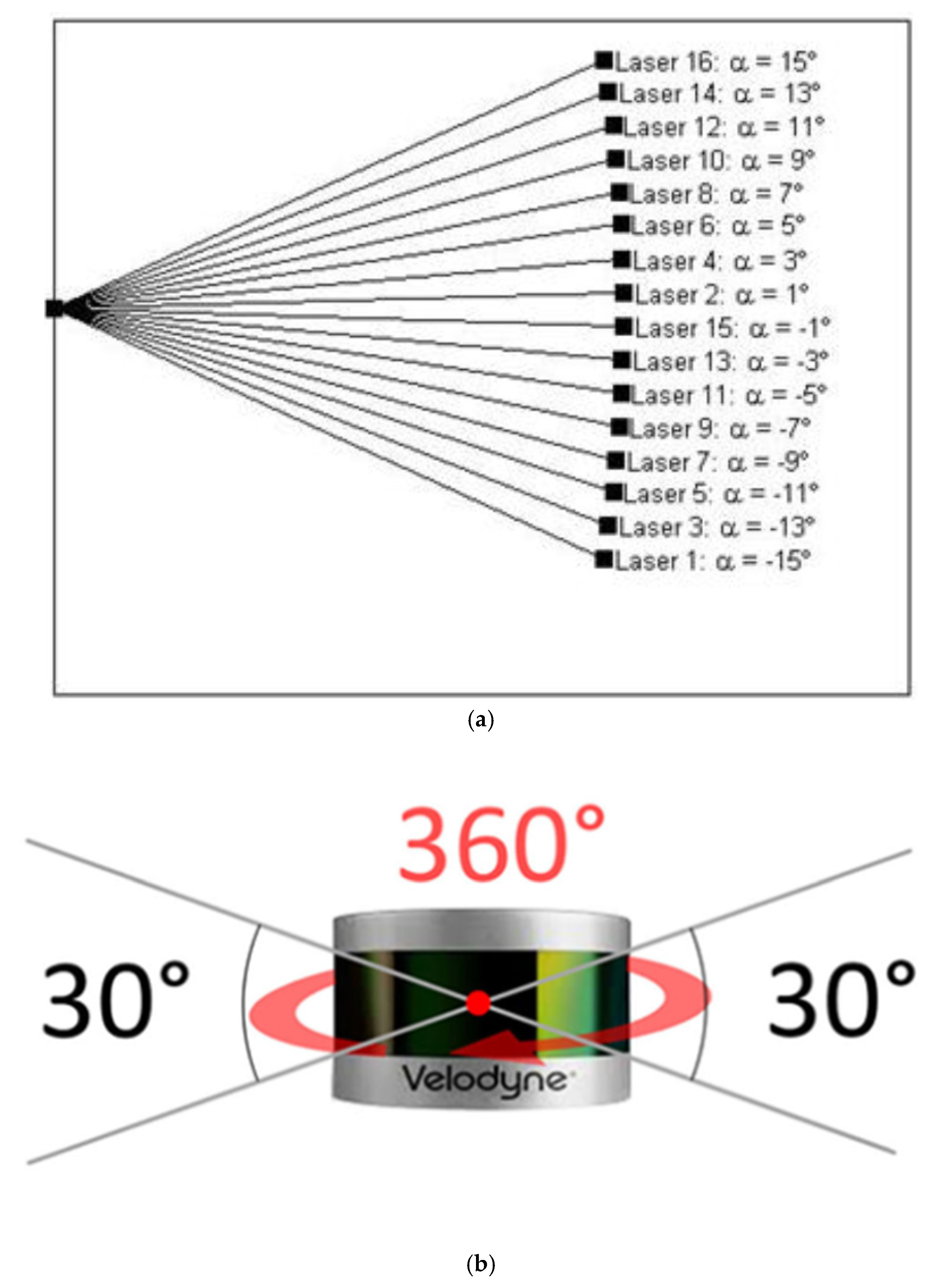
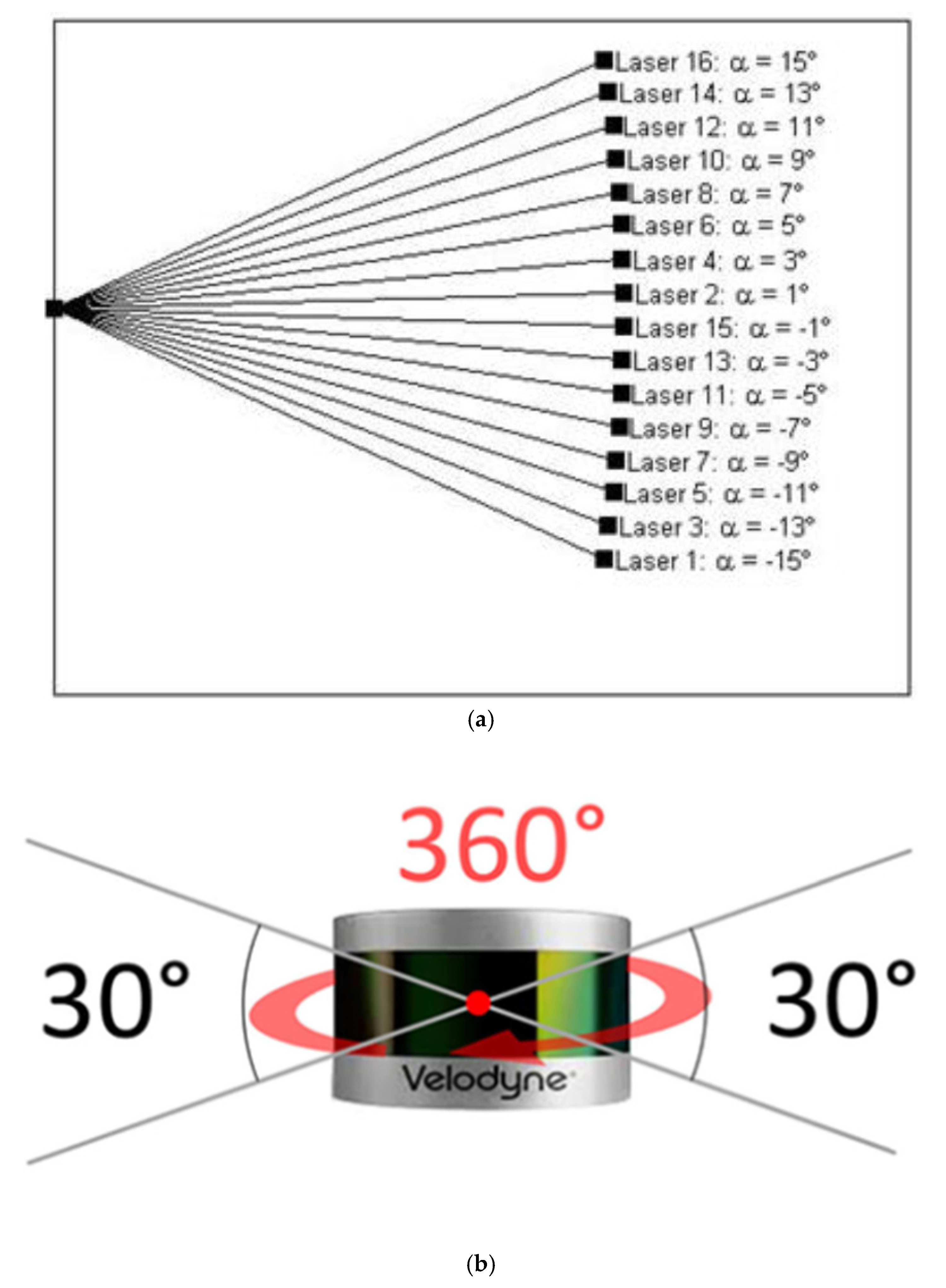
The Velodyne VLP-16 multibeam LiDAR sensor (Velodyne Lidar Inc., San Jose, CA, USA) is embedded in the GeoSLAM ZEB Horizon LiDAR scanner as the data collector. The Velodyne VLP-16 sensor comprises 16 individual laser transmitter pairs, which are individually aimed in 2° increments over the 30° field of view of the laser scanner (
Figure 1).
The performance and calibration of the VLP-16, as one of the most popular multibeam spinning LiDAR sensors currently available on the market, have been studied and reported in the literature. The studies indicate that the calibration of the manufacturer’s Velodyne multibeam LiDAR sensor is not quite complete. After laboratory calibration, the accuracy of the point cloud could be further improved. One of the prerequisites for accuracy improvement of point clouds collected by the Velodyne multibeam LiDAR sensor is to eliminate the system error of the multibeam LiDAR sensors by calibration [
15,
16,
17].
The calibration methods of the multibeam LiDAR sensors or scanners can be classified based on the method of obtaining the calibration data. One is called static calibration; the other is called dynamic calibration. In order to reduce the influence of the error caused by the incident angle and intensity value, and to obtain various ranging measurements and angle observation data, static calibration must place the sensor or scanner for calibration at different stations for data collection. For example, Glennie et al. [
16] performed static calibration for the VLP-16 with planar features and studied its temporal stability. It was reported that the accuracy had increased by about 20% after calibration in a single collection. Chan et al. [
13] considered the range scale factor of the range measurement in the static calibration of the VLP-16. The results showed that both the rangefinder offset and the range scale factor were considered; the RMSE of the check plane could be reduced by 30%. Meanwhile, the results were better than those with only either the rangefinder offset or the range scale factor considered. In summary, these studies demonstrated that self-calibration can further reduce the systematic error of the VLP-16. Since the range accuracy of the VLP-16 contributes significantly to the final data quality, it has been intensively studied with self-calibration experiments for the GeoSLAM ZEB Horizon.
Glennie [
17] and Nouira et al. [
18] installed the multibeam LiDAR sensor on a vehicle. They used the dynamically collected point cloud data for calibration, that is a dynamic calibration or kinematic calibration, eliminating the scanning demand on multiple stations to obtain point cloud data with different ranging measurements and improving the calibration efficiency.
The past study showed that the system error parameters could be more steadily calibrated if the calibration data contained uniformly distributed point cloud data at different ranging measurements. Although the accuracy of the specific ranging measurements would be significantly improved, the point cloud outside the specific ranging measurements would have a negative impact if the calibration data only contained certain specific ranging measurements [
19].
In terms of system error parameter selection, system error parameters can generally be divided into physical correction parameters that have physically interpretable geometric meanings or empirical correction parameters that are obtained by statistical methods and can be explained empirically [
20,
21]. However, the empirical parameters require long-term statistical analysis, and the empirical parameters of different styles of scanners are not necessarily the same. In terms of physical parameters, Muhammad and Lacroix [
19] supposed the rotating multibeam LiDAR consists of five system error parameters, which are the ranging system error ∆
r, vertical angle error ∆α, horizontal angle error ∆β, vertical offset
, and the horizontal offset
for each laser. Velodyne also sets five system error parameters for each laser of its multibeam LiDAR sensor HDL-64E S2 [
15]. However, Glennie and Lichti [
15], Glennie et al. [
16] and Glennie [
17] found that the vertical angle error ∆α and the horizontal angle error ∆β are highly correlated with the vertical offset
and horizontal offset
from the scanner frame origin for each laser in the static and dynamic calibration results. Glennie et al. [
16] and Chan and Lichti [
22] also indicated that the laser transmitter was a fixed component in the LiDAR scanner, precisely installed in the LiDAR scanner by the manufacturer. Thus, the vertical offset
, the horizontal offset
for each laser, and the vertical angle error Δα are remarkably small compared to the ranging system error, which could be ignored in the system error parameters. Chan and Lichti [
22] stated that the vertical offset
can be regarded as the radial distance
between the scanning center, and the origin multiplied by
, and
can be regarded as part of the ranging system error ∆
r. Therefore, the vertical offset
can be absorbed by
and can be removed from the system error parameters.
In the calibration results of Chan et al. [
13], it was found, on the contrary, that in the VLP-16 ranging system error parameter, if only a single parameter of the range scale factor or the rangefinder offset was included in each beam, it would have a negative impact on the RMSE of the check planes after calibration. The error of the ranging system must be included in the range scale factor and the rangefinder offset at the same time in each beam to stably reduce the RMSE of the check planes. However, the correlation coefficient would probably be too high between the range scale factor and the rangefinder offset while the scanning distance is less than 50 m. If the range scale factor and the rangefinder offset are considered simultaneously, the long-ranging measurement calibration data must be appropriately increased [
15].
Considering the scanning point density of the VLP-16, it is more feasible to use geometric features instead of calibration targets. Plane features are the most easily obtained features of an indoor environment. The GeoSLAM ZEB Horizon can directly use dynamic scanning to collect data for calibration, avoiding the scanning problem of multiple stations while saving time [
17]. Meanwhile, dynamic scanning can obtain more various ranging measurements and increase the reliability of calibration. The autorotation of the multibeam LiDAR scanner can avoid the limitation where the multibeam LiDAR scanner must be scanned at different tilt angles to obtain calibration data from different angles. The horizontal offset
and the vertical angle error ∆α are less significant than other parameters. On the other hand, the horizontal angle error ∆β only has a significant impact on long-distance observations [
17]. Moreover, the GeoSLAM ZEB Horizon is usually for short-distance scanning, and the angle error has a low impact (e.g., data collection in narrow and winding alleys for building information). Therefore, the horizontal angle error Δβ could be ignored, and the system error calibration is only performed for the range scale factor and the rangefinder offset for the GeoSLAM ZEB Horizon. However, the literature has focused on the multibeam LiDAR scanner. Each laser transmitter in the scanner has a different set of system error parameters [
13,
16]. The VLP-16 has 16 laser transmitters; that is, there are 16 sets of system error parameters. Moreover, the GeoSLAM ZEB Horizon installs the Velodyne VLP-16 in a rotating mechanism, which rotates while scanning. Therefore, it is difficult to convert the horizontal angle error in the horizontal state. Additionally, the GeoSLAM ZEB Horizon cannot output the laser transmitter parameters in the scanning results. In particular, the laser transmitter of each point data cannot be identified. Thus, only a set of system error parameters could be assumed for all data. Therefore, the ranging system error ∆
r is described by the range scale factor (
S) and the rangefinder offset (
C).
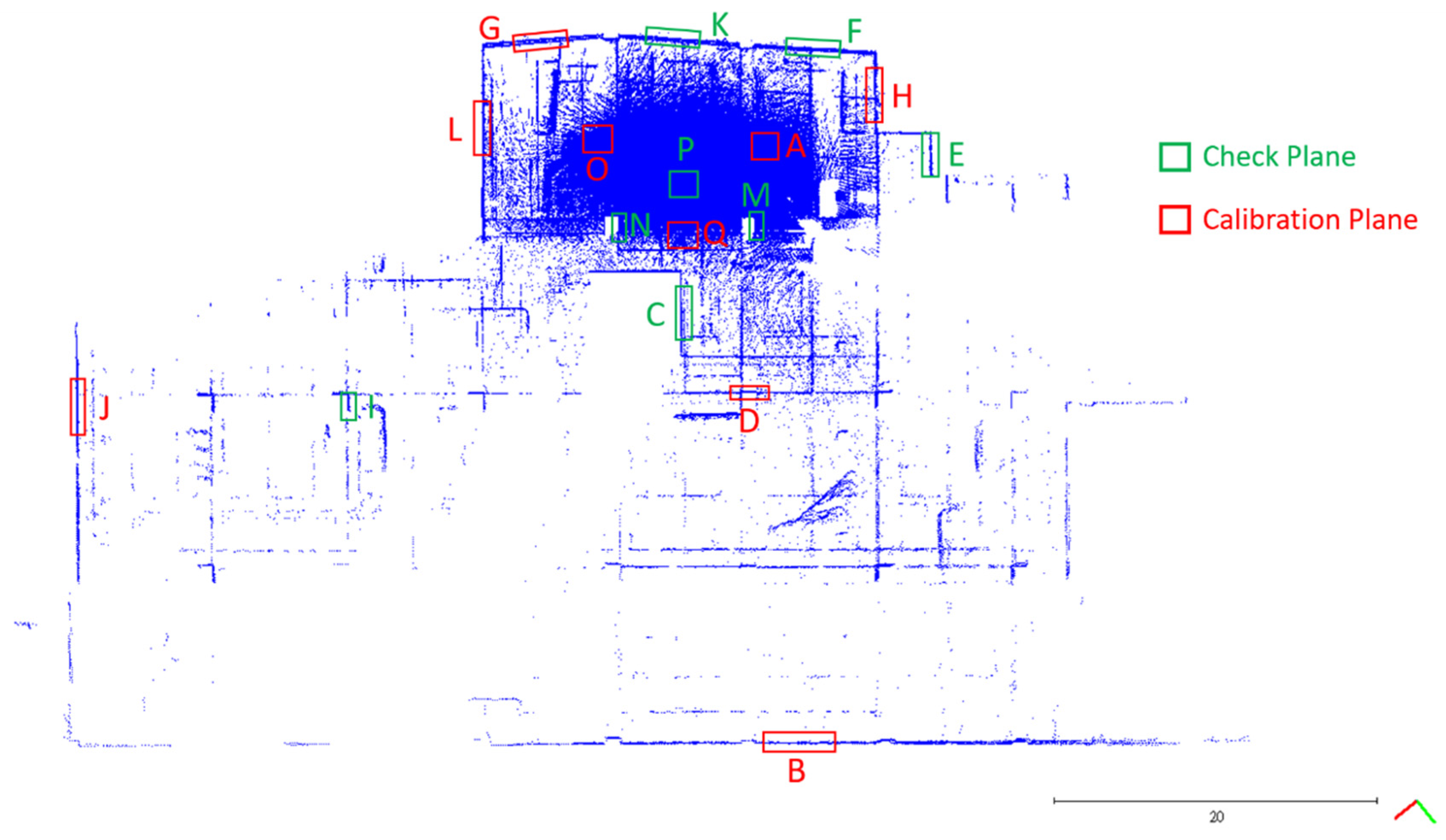
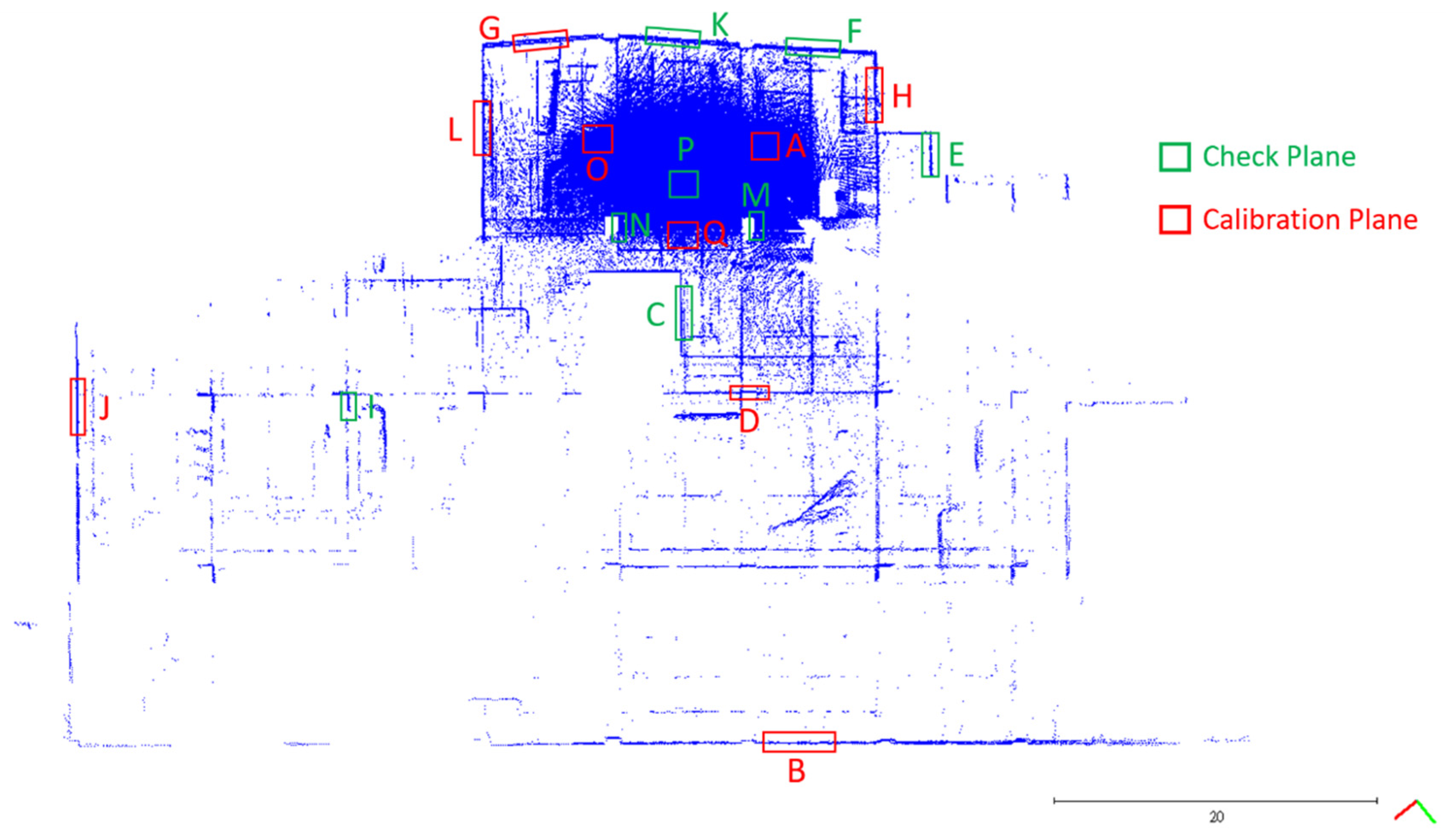
Accordingly, a plane-based dynamic calibration method for the GeoSLAM ZEB Horizon was proposed by the previous study [
23] to calculate the systematic errors, including the range scale factor (
S) and the rangefinder offset (
C), and an indoor environment with sufficient space was selected as the calibration field. The plane parameters were estimated from the higher precision ground-based LiDAR scanner for calibration planes and check planes. Calibration points on the surfaces of planar features were collected kinematically, extracted manually, and noise point clouds were removed by the RANSAC algorithm [
24]. The proposed calibration method estimated the range scale factor (
S) and the rangefinder offset (
C) of the GeoSLAM ZEB Horizon simultaneously with the coordinate transformation parameters by transforming the corrected handheld point clouds to lie on the surfaces of calibration planar features in order to minimize the sum of the square of the residuals. Although the results verified that the residuals could be reduced, and the check plane accuracy improved by an average of 41% by calibrated ranging system error correction, the calibration data with only short-ranging measurements were used. Furthermore, only one preliminary test was presented, and no more advanced study was investigated. Therefore, this study used calibration data with long-ranging measurements to further investigate the calibration results using calibration data collected on different dates and at different times on the same date.
4. Conclusions
This study investigated the calibration results on different dates and at different times on the same date from the three datasets using the plane-based dynamic calibration method proposed by the previous study [
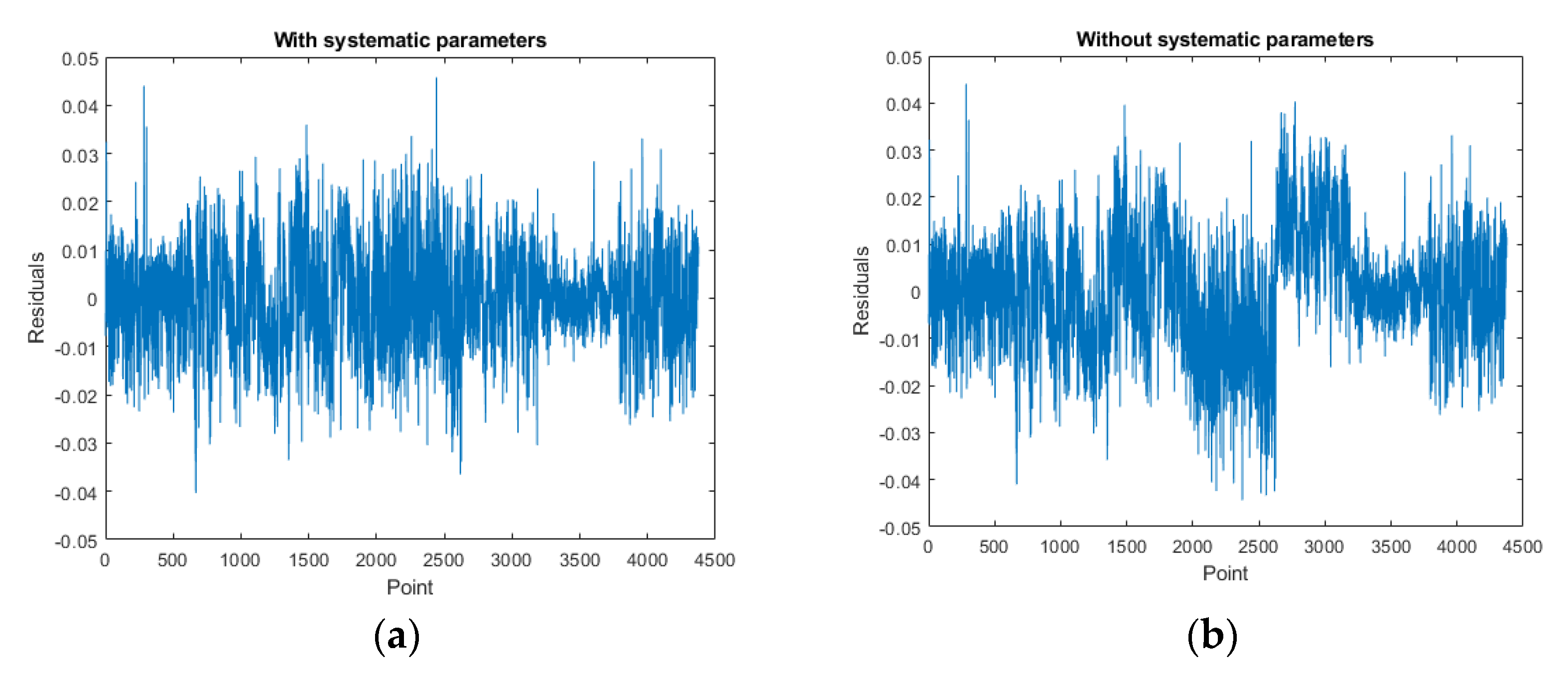
23] for the GeoSLAM ZEB Horizon LiDAR scanner. Without considering the angle system error of the handheld LiDAR scanner, only two ranging system error parameters, including the range scale factor and the rangefinder offset, were calibrated.
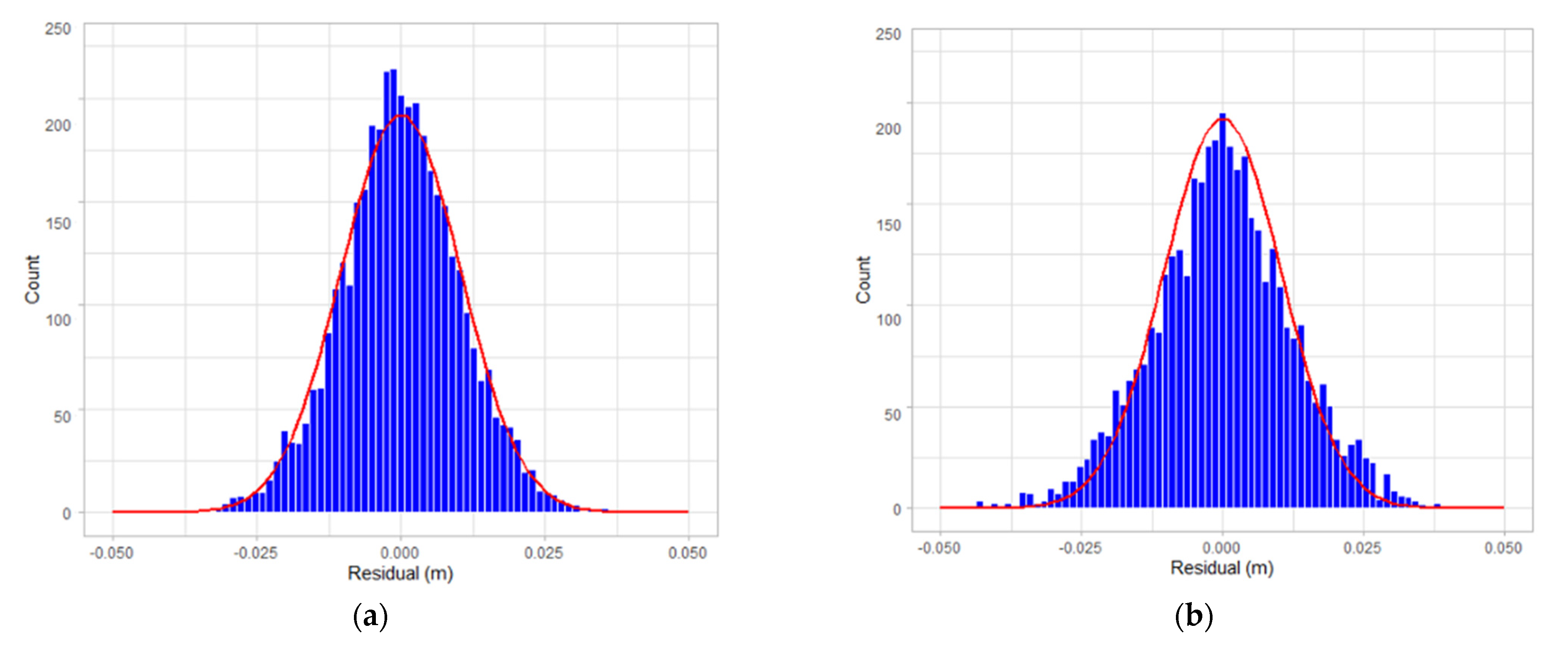
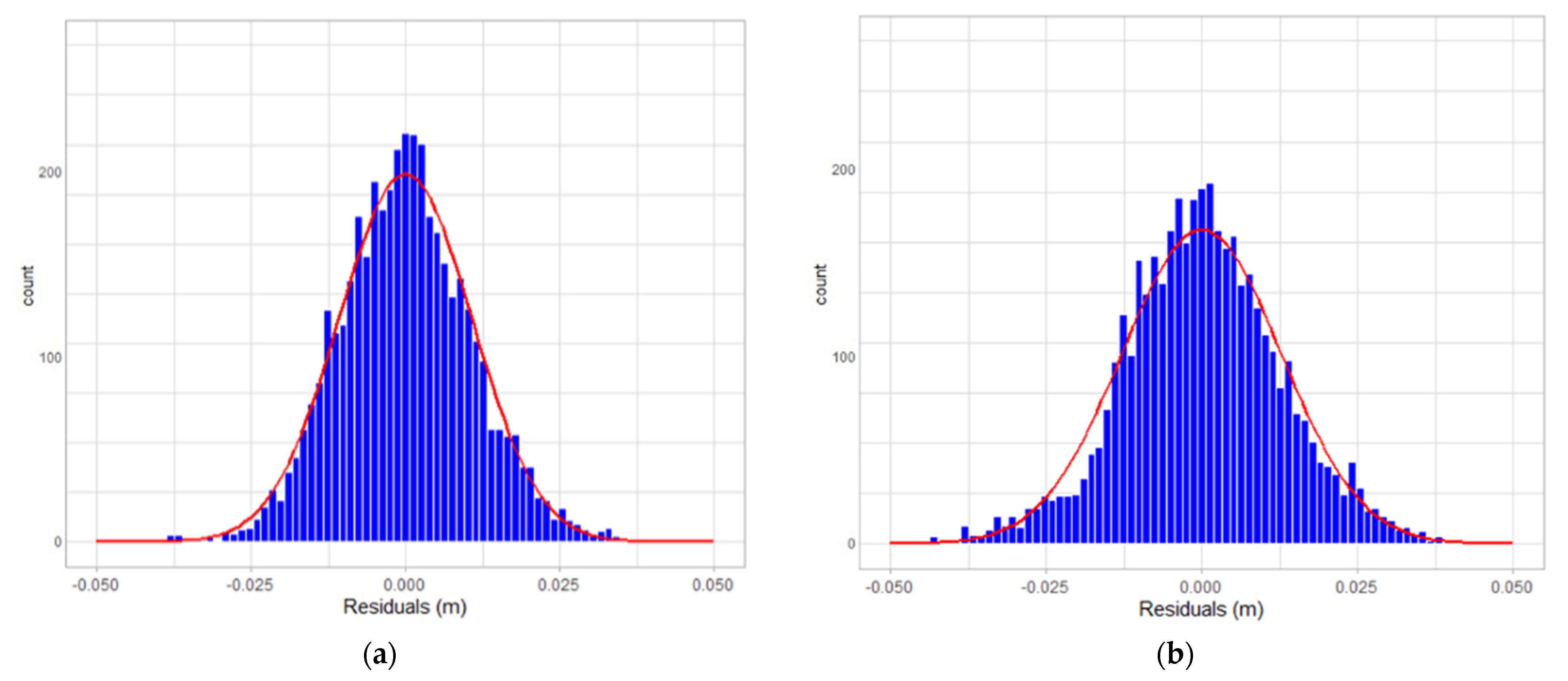
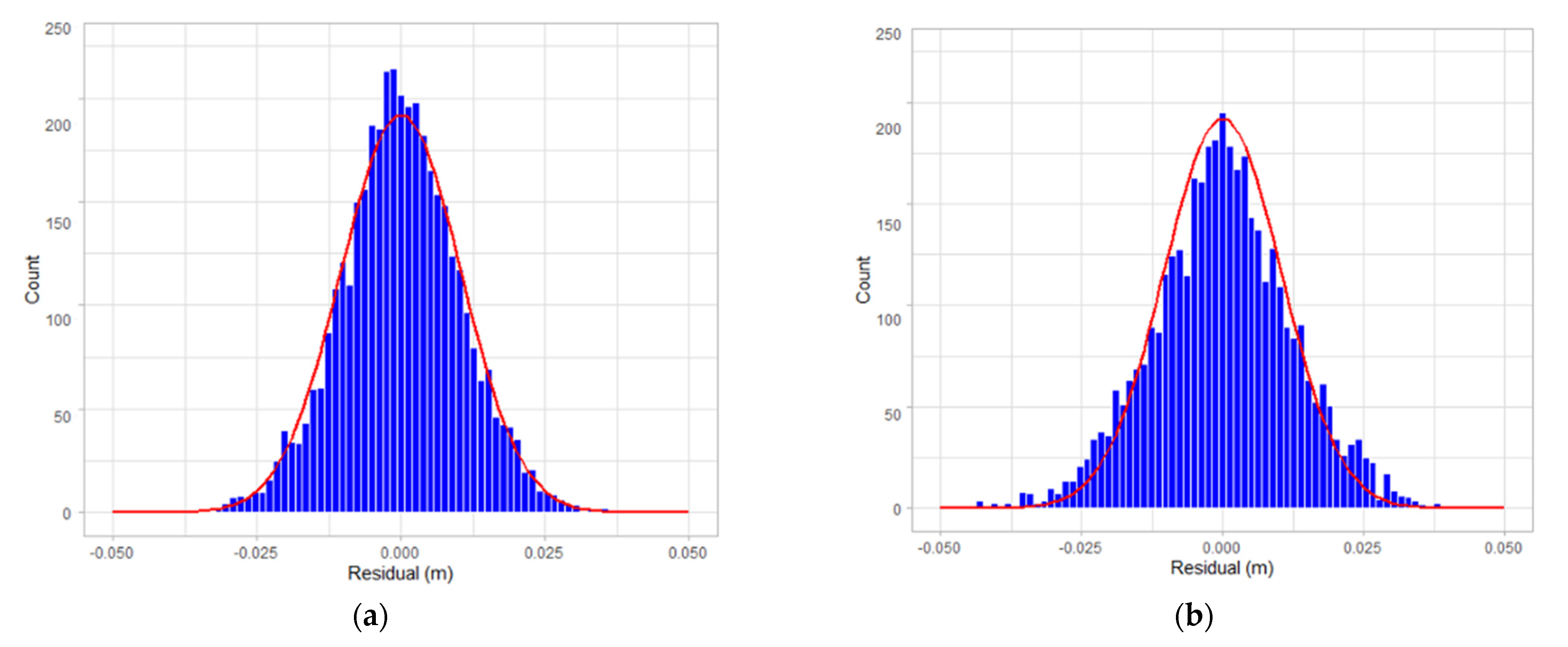
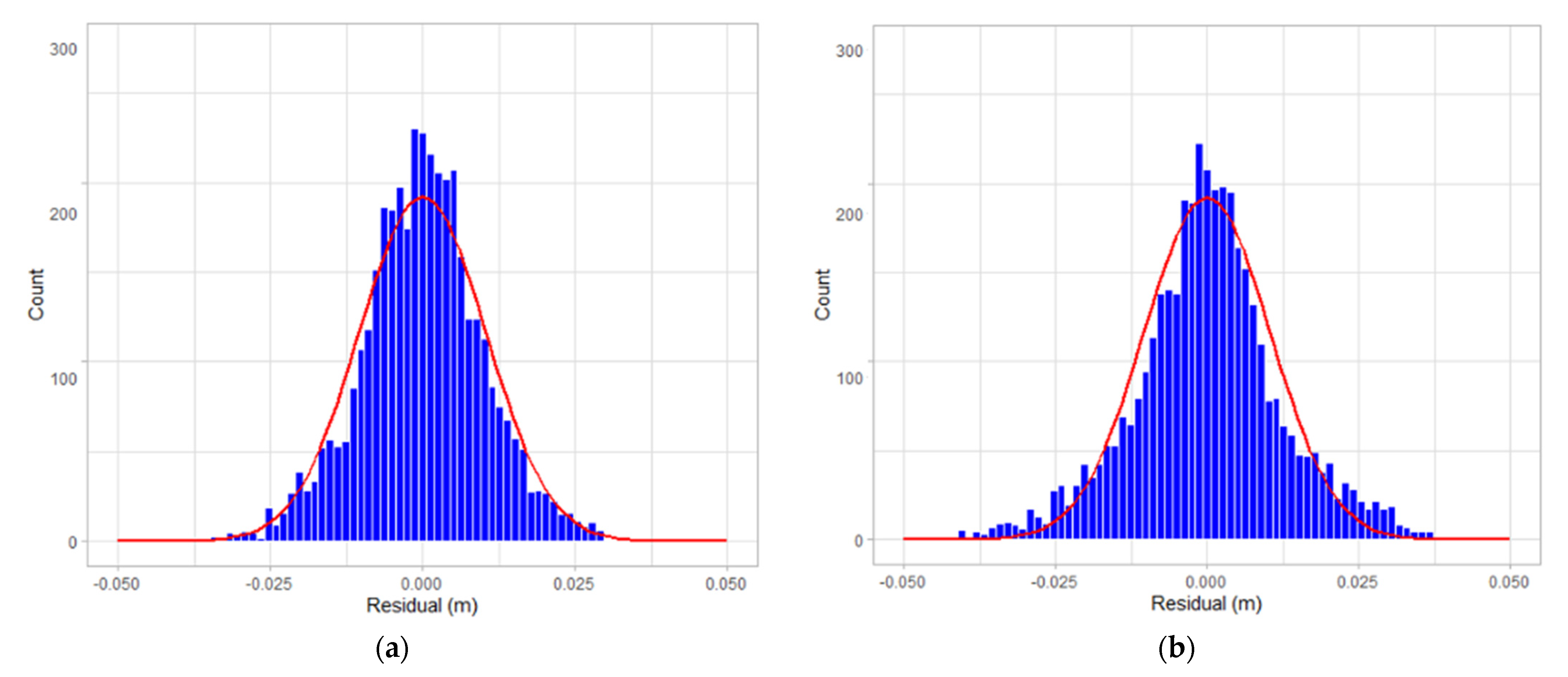
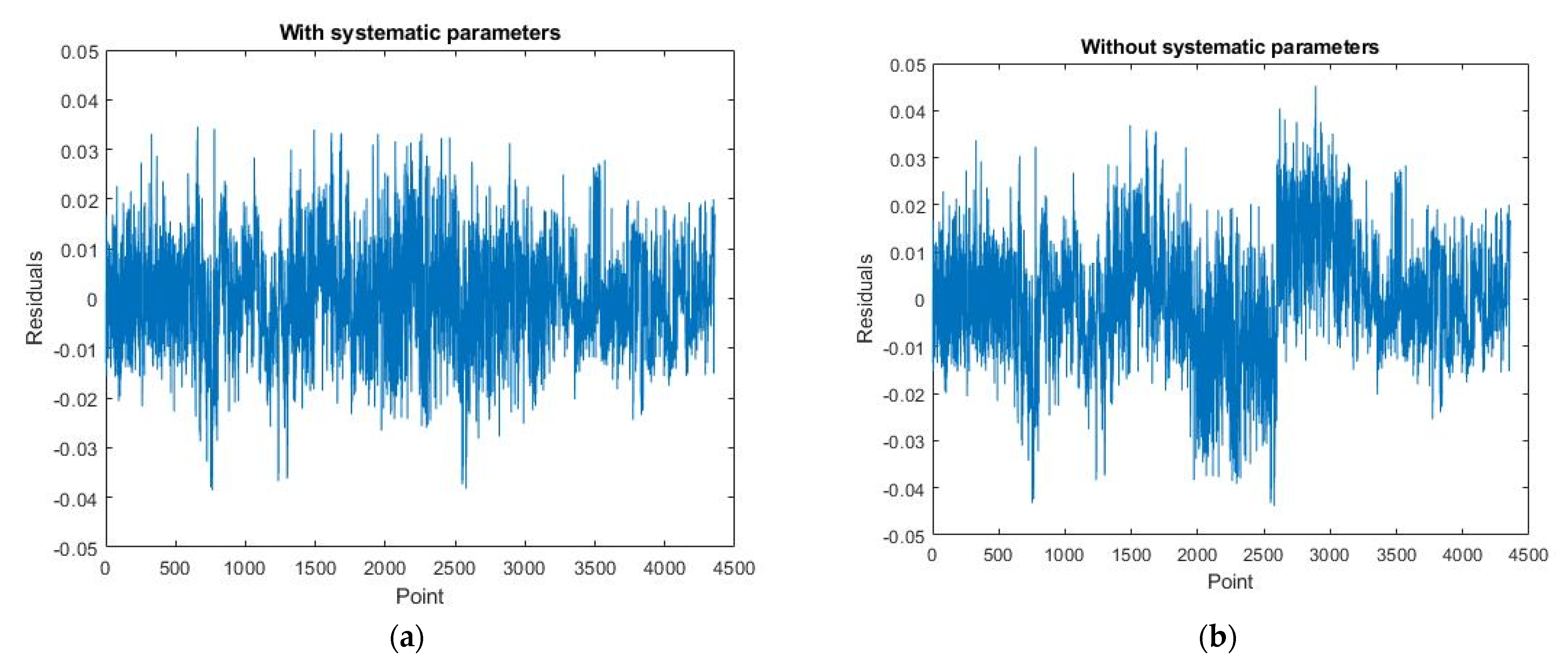
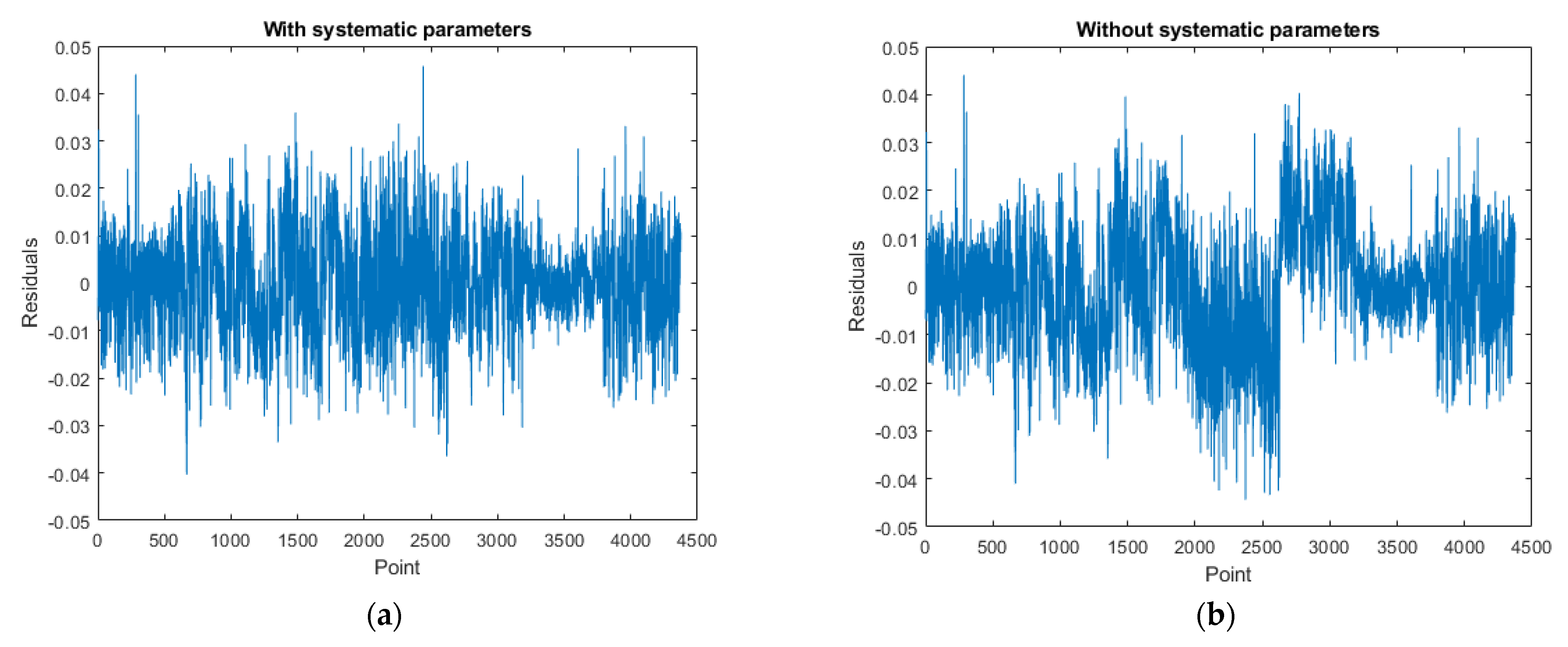
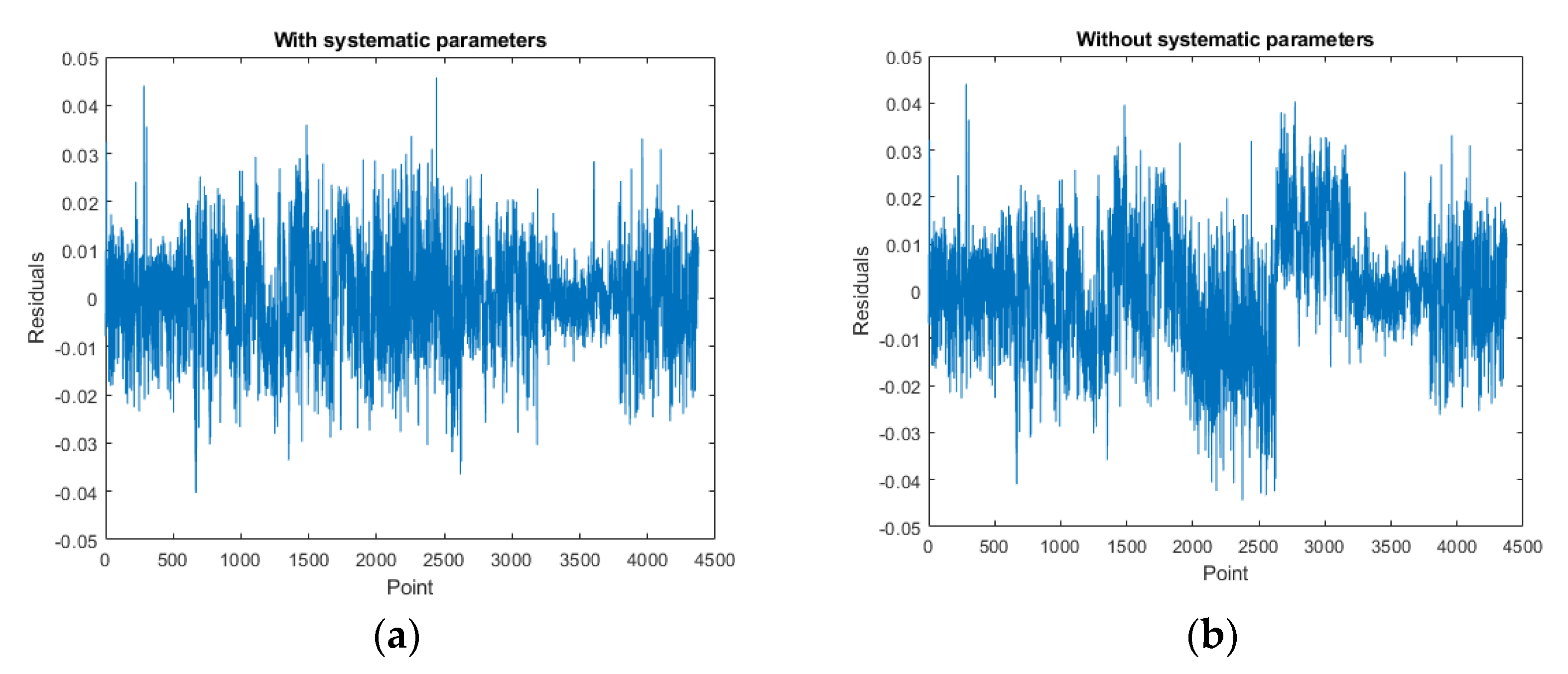
After calibration, the distribution of residuals was more concentrated at 0, and the residual distribution was more in line with the normal distribution curve for the calibration data of the three datasets collected on different dates and at different times on the same date. For the three datasets, the average residuals were closer to 0, and the
a posterior unit weight standard deviation became smaller, both of which were improved, compared to those without the additional ranging parameter in the adjustment. Therefore, the plane-based dynamic calibration method proposed by the previous study [
23] used in this study could eliminate most of the GeoSLAM ZEB Horizon’s ranging system errors.
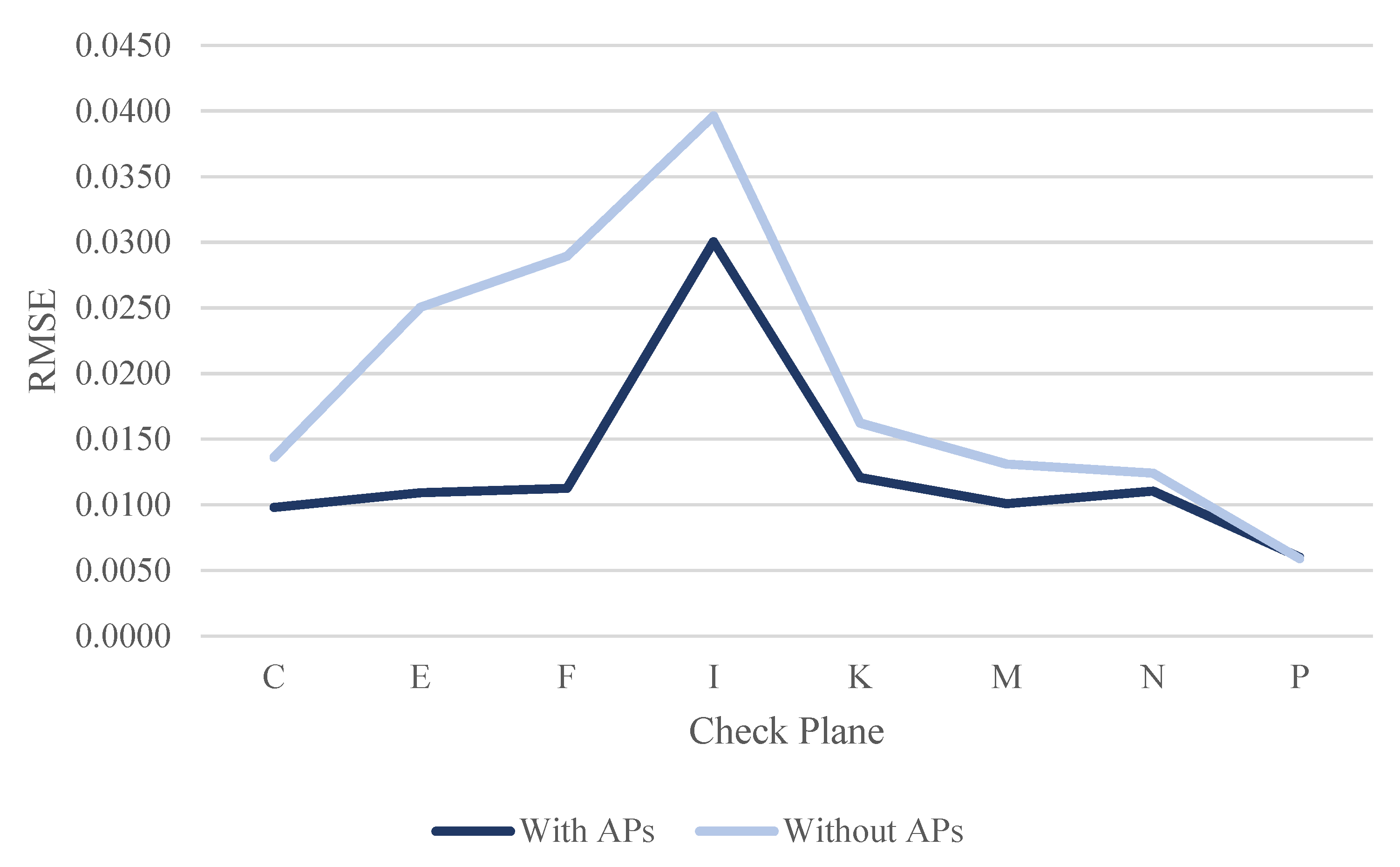
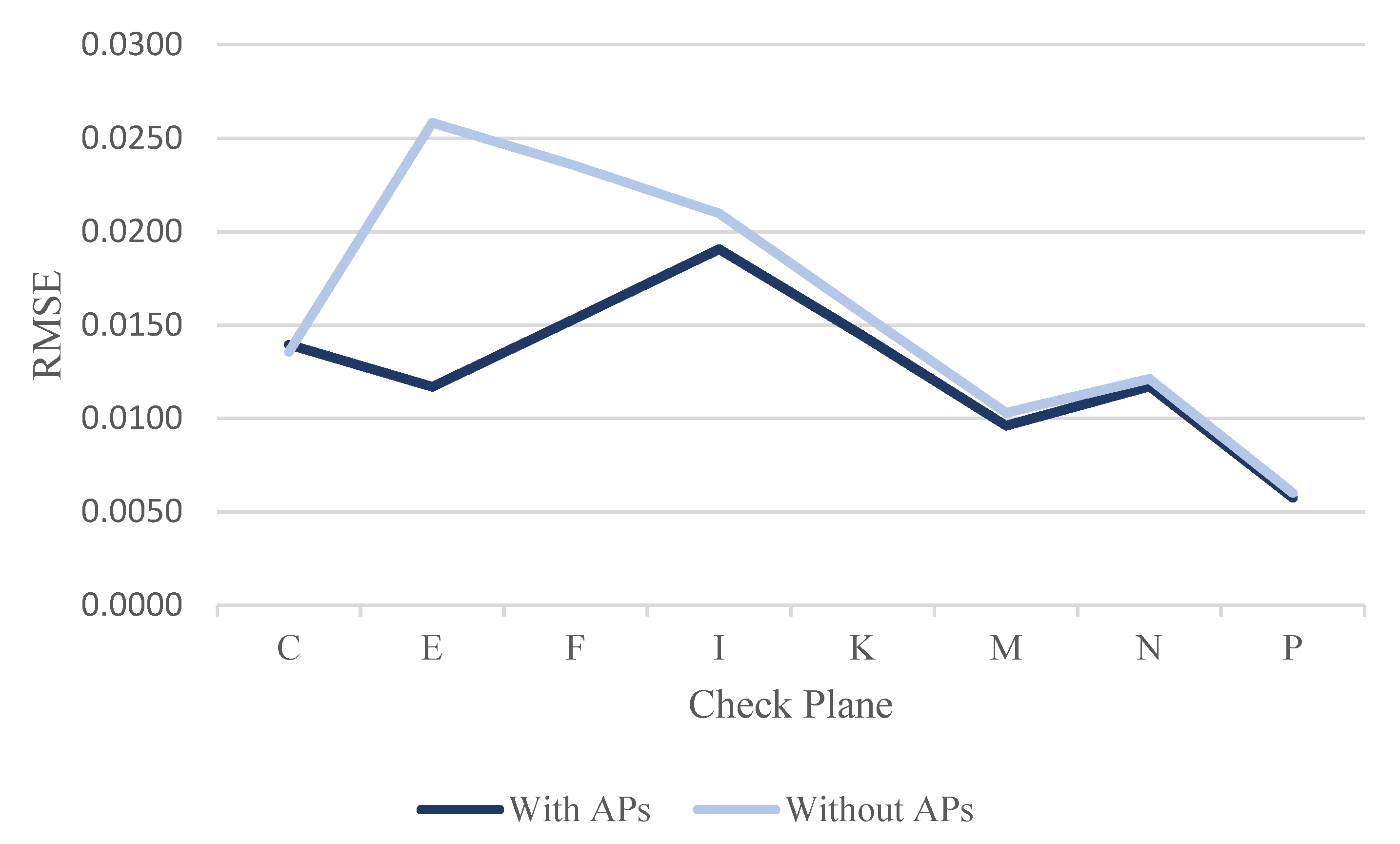
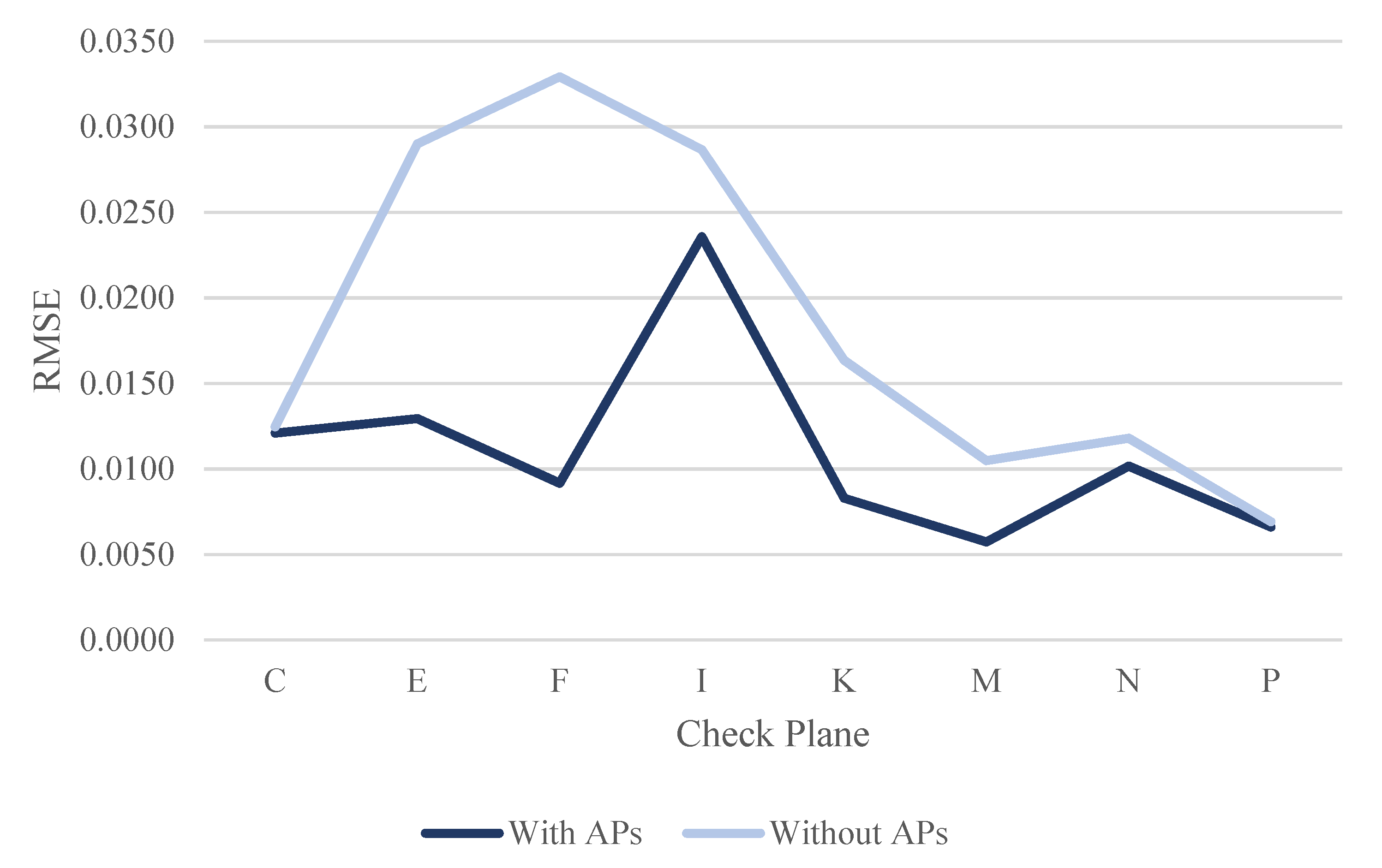
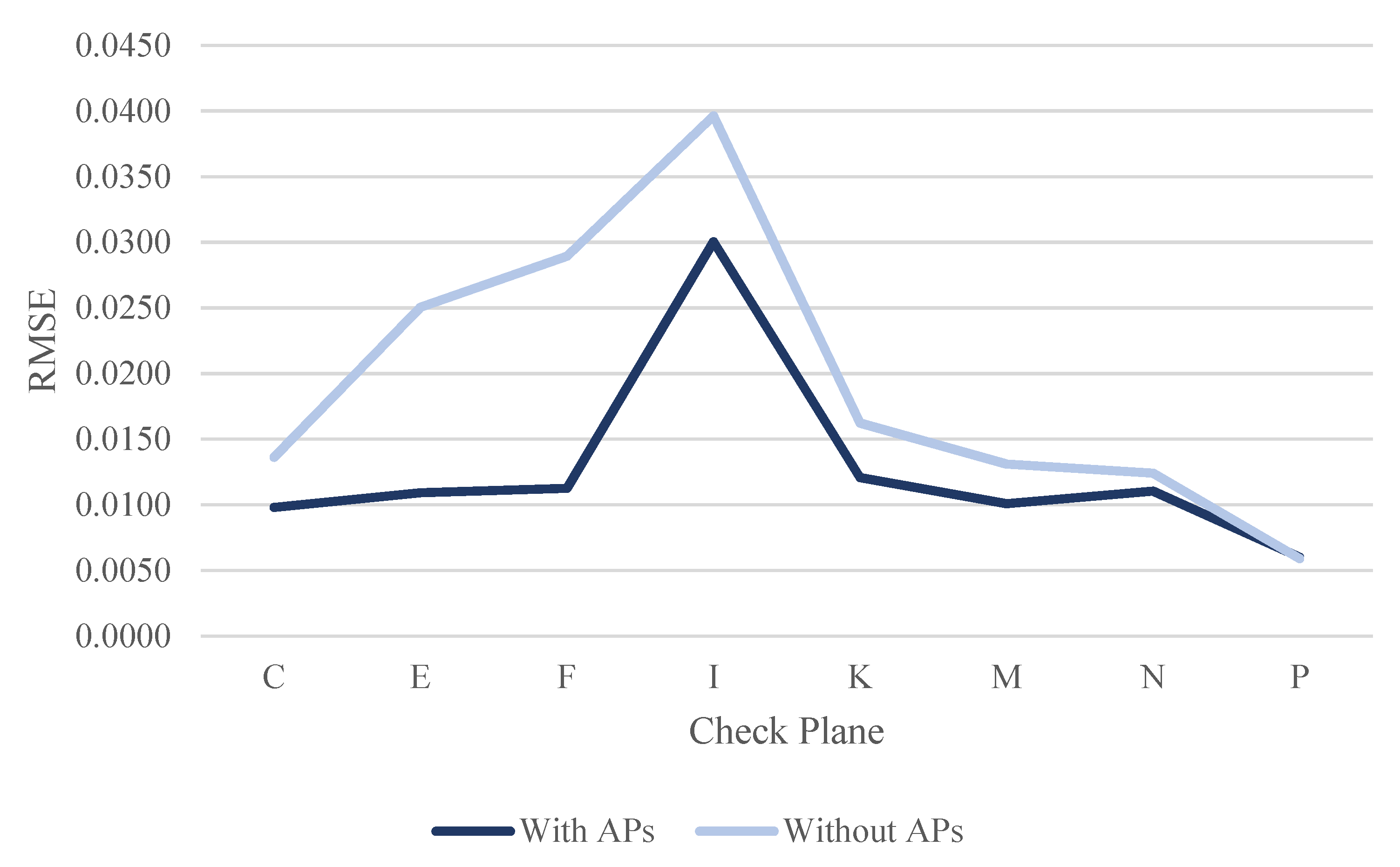
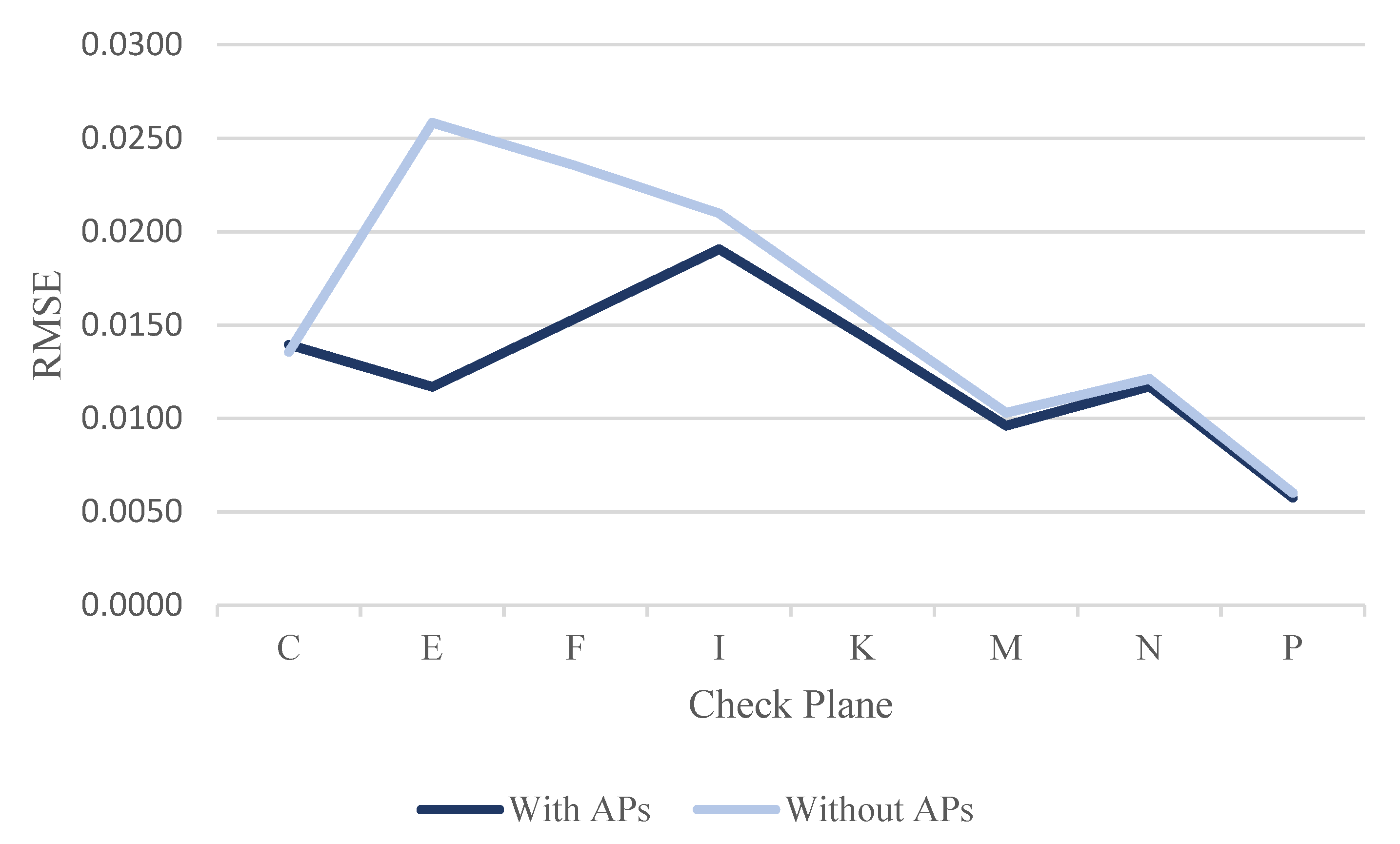
Based on the analysis of the RMSE results, the RMSE of all check planes was improved after correcting the ranging system error for the dataset DATA1. With up to 72.12% in one plane, an increase of about 2.4 cm was reached. The overall average improvement was 32.61%. For the dataset DATA2, with up to 61.08% in one plane, an increase of about 1.8 cm was reached. The overall average improvement was 28.44%. For the dataset DATA3, with up to 54.77% in one plane, an increase of about 1.4 cm was reached. The overall average improvement was 14.70%. Although the improvement of the dataset DATA3 was less than that of the dataset DATA2, the quality of the former’s point cloud was better than that of the dataset DATA2. The improvement is highly correlated with the quality of calibration data. The improvement of the RMSE of the check planes demonstrated again that the proposed calibration approach could effectively improve the overall point cloud accuracy of the GeoSLAM ZEB Horizon.
From the comparison of the RMSE difference of each check plane for the three calibration datasets, after calibration on different dates and at different times on the same date, the difference in the mean RMSE difference of the two sets of results was 0.0016 m, using data collected on different dates. On the other hand, the difference in the mean RMSE difference was only 0.0001 m when using calibration data on the same date but at different times to calibrate. There was no difference in the calibration results, showing the stable calibration on the different dates and at different times on the same date. This finding also demonstrated the efficiency of the proposed calibration approach and the calibration results during these two different dates.
From the investigation of the correlation between the additional ranging parameters
S and
C, the negative correlation between the ranging additional parameters
S and
C was −0.82, −0.81, and −0.79 for the three calibration datasets (DATA1, DATA2, and DATA3). The lower negative correlation between the ranging additional parameters makes the solution results of the ranging additional parameters
S and
C more reliable. Calibration data (DATA3) with longer calculated ranging measurements for calibration made the negative correlation between the ranging additional parameters,
S and
C, the least (−0.79). It demonstrated that the dataset with long calculated ranging measurements for calibration would reduce the negative correlation between the ranging APs; the negative correlation of the dataset DATA3 was lower than those of the datasets DATA2 and DATA1. Meanwhile, the calibration data of these three datasets employed about a 40–45 m longer calculated ranging measurements for calibration; the calibration data used in the previous study [
23] employed only about 20 m calculated ranging measurements for calibration. Therefore, the negative correction in the previous study [
23] is extremely high (−0.985), higher than those of the datasets used in this study. However, −0.79 was also high; if a larger calibration site or suitable plan for scanning is available for collecting the handheld LiDAR points with more, longer calculated ranging measurements for calibration in the future, it is believed that the negative correlation would be reduced, and the solutions of
S and
C would be more reliable.
The analysis of ranging systematic error parameters S and C concluded that when scanning by a handheld LiDAR scanner, the closer to the target, the lesser the correction. However, even if it were 2 meters, the correction would be 1–2 cm for ranging measurement. When using a handheld LiDAR scanner for precise surveying (e.g., cadastral surveying), these ranging system errors should be corrected to obtain more accurate results. The difference of the correction on different dates (the datasets DATA1 and DATA2, DATA1 and DATA3) at different distances was about 1–2 cm. On the other hand, the difference of the correction at different times on the same date (the datasets DATA2 and DATA3) at different distances was less than 1 mm. There was no difference in the calibration results, reiterating the stable calibration on the different dates and at different times on the same date in this study. Moreover, it demonstrated the efficiency of the proposed calibration approach.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

