
Wearable Sensors Based on Force-Sensitive Resistors for Touch-Based Collaborative Digital Gaming

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
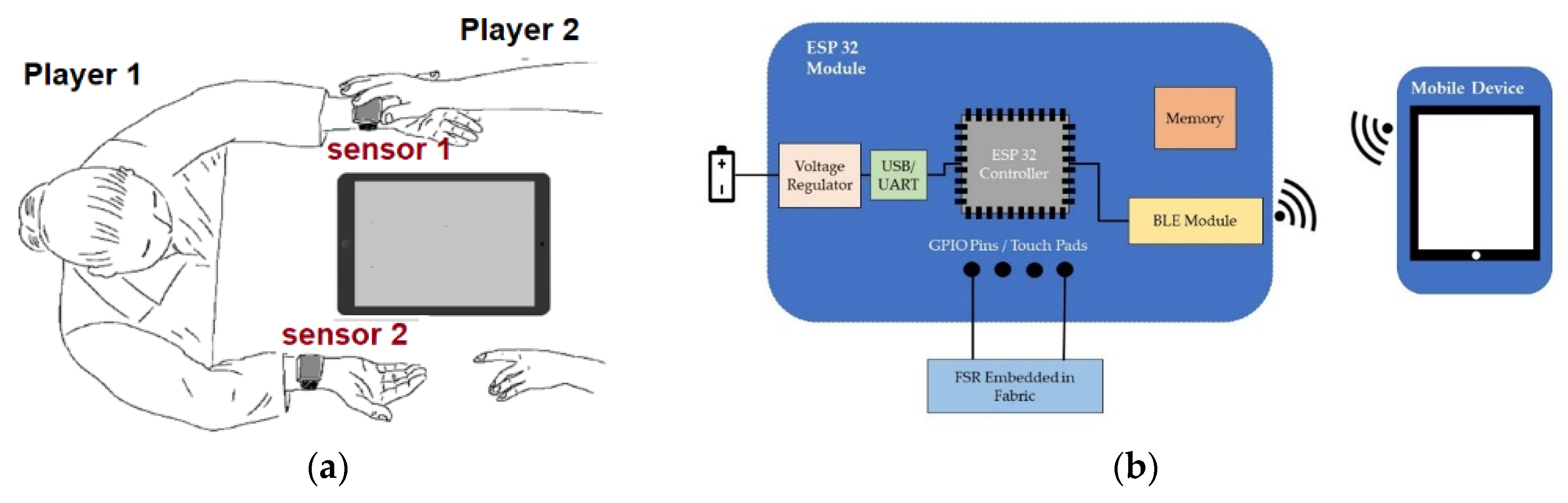
2.1. System Overview
2.2. Research Design
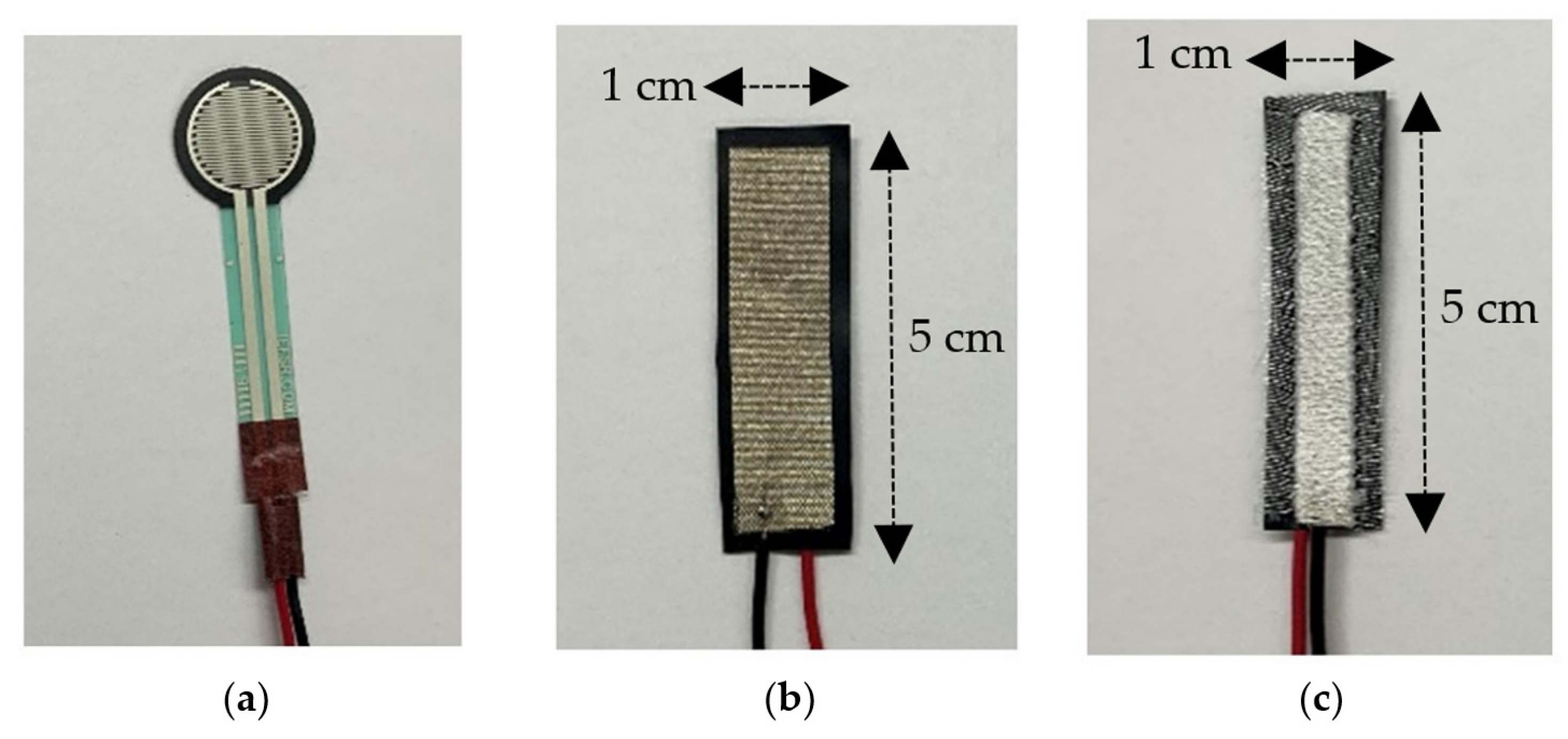
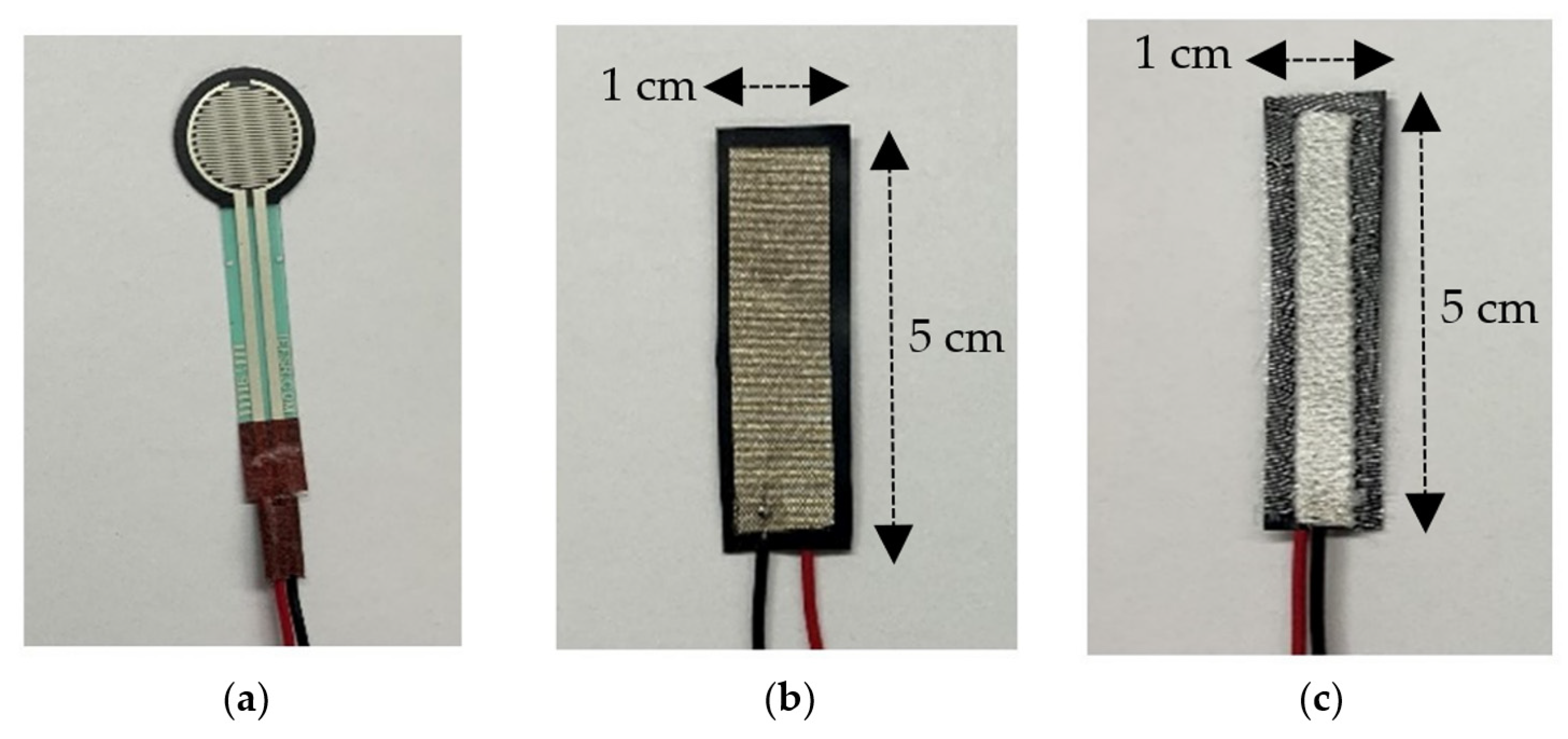
- The first implementation shown in Figure 3b uses woven conductive fabric from Adafruit Industries, LLC made of copper, and nickel-plated polyester with a surface resistivity of 0.05 Ω/sq [44]. Velostat of 0.1 mm thickness is sandwiched between the two conducting sheets using a permanent fabric adhesive to form the FSR.
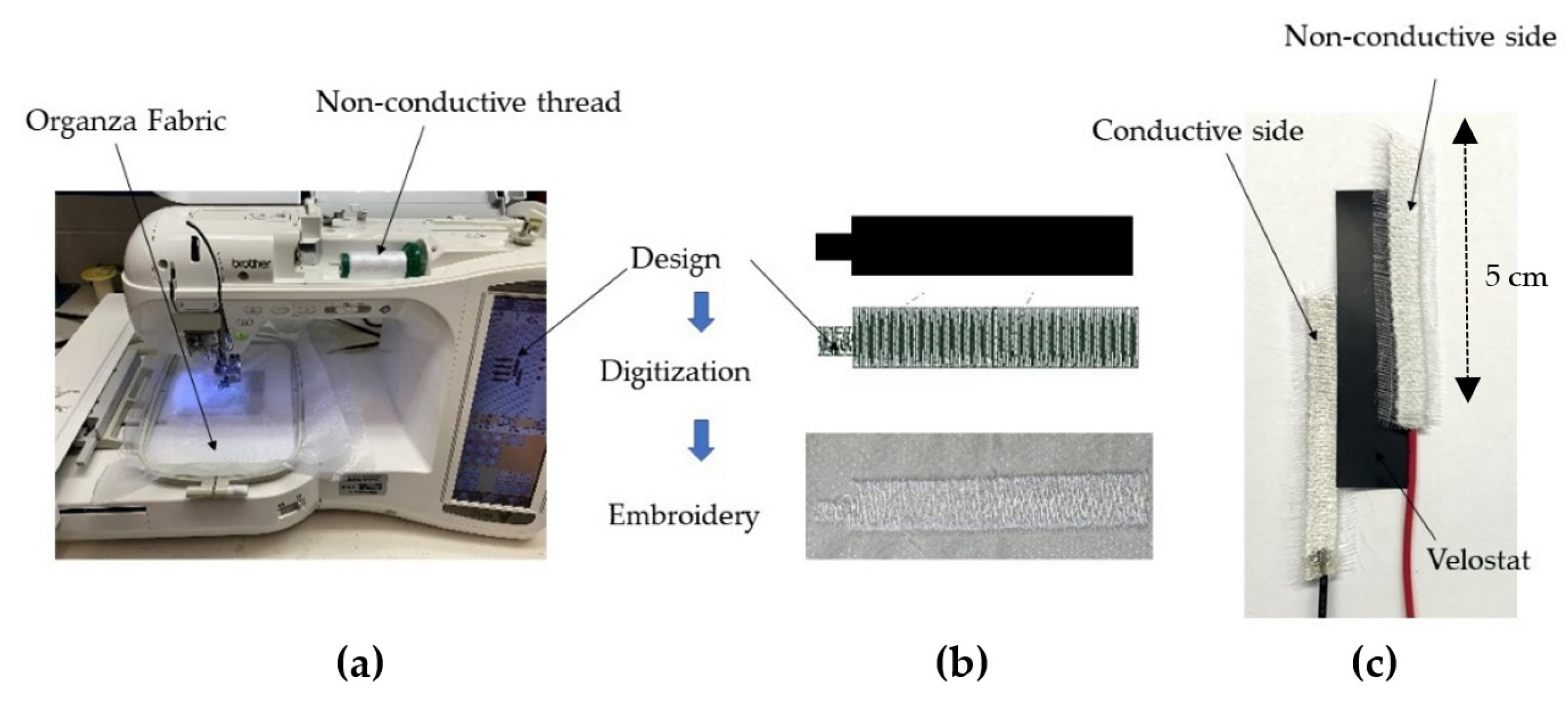
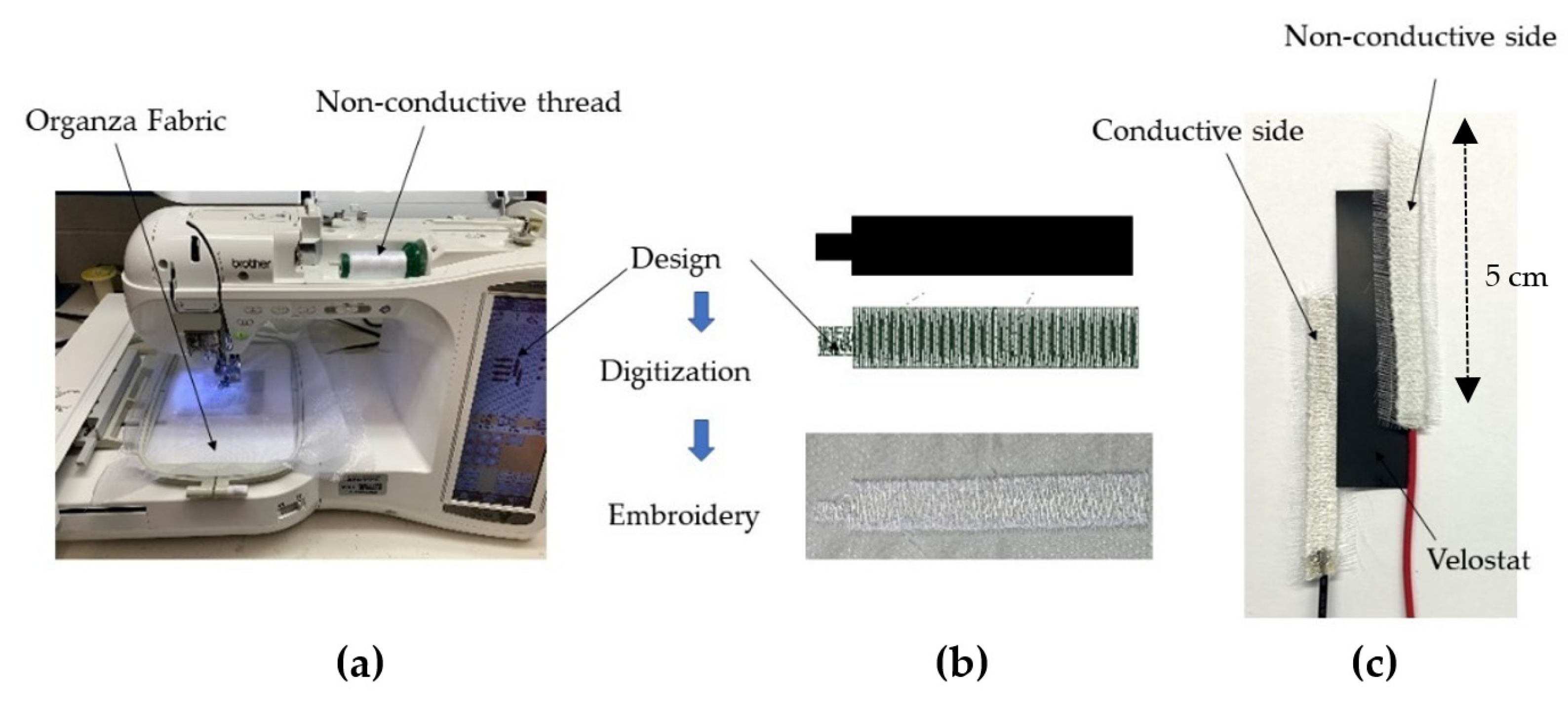
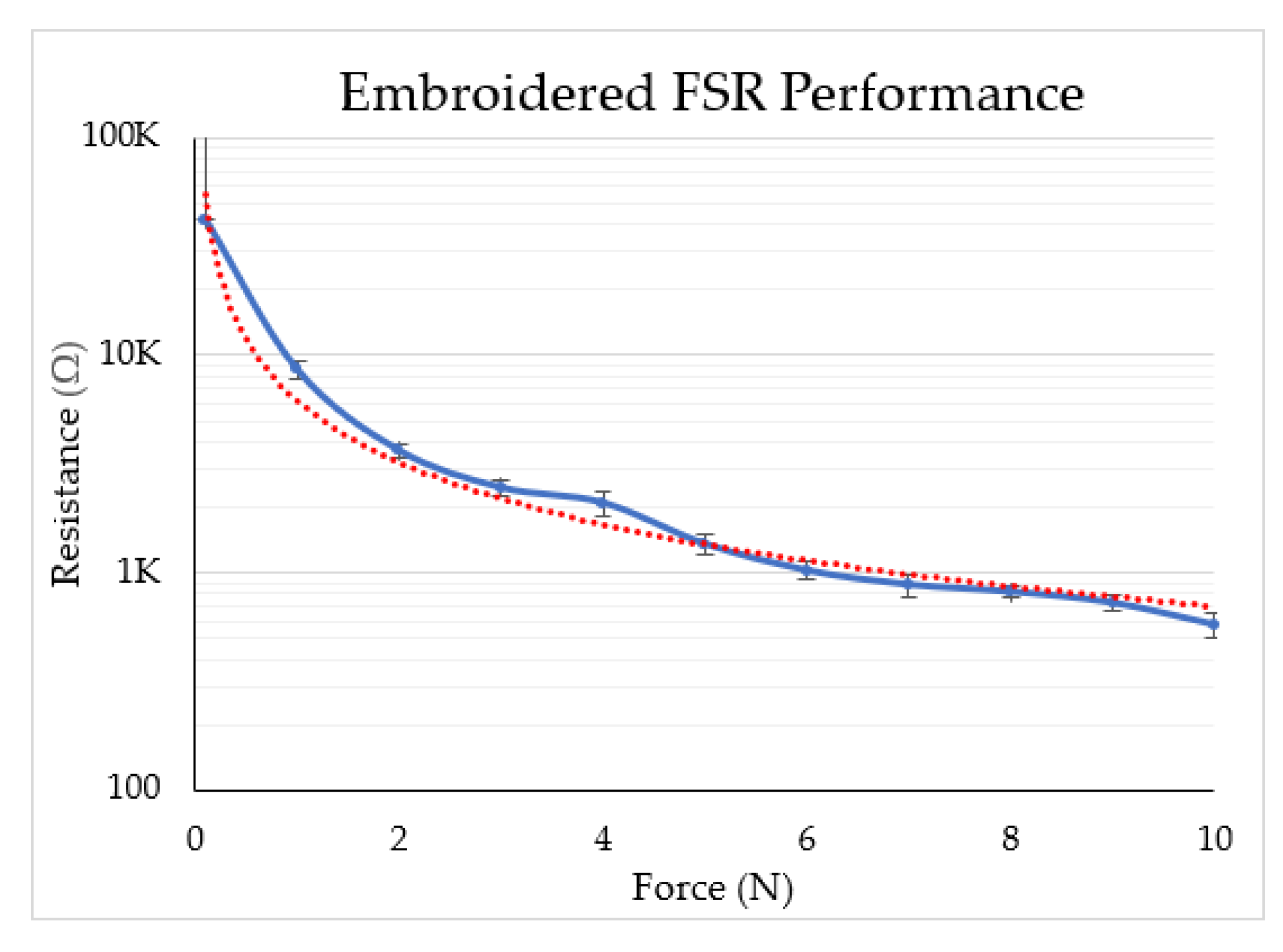
- The second implementation shown in Figure 3c relies on the embroidery of seven-filament silver-plated copper Elektrisola e-threads exhibiting a very low resistivity of 1.9 Ω/m and a fine diameter of 0.12 mm. These e-threads are placed in the bobbin case of an automated Brother 4500D embroidery machine, whereas the non-conductive polyester threads are placed in the spool pin. Referring to Figure 5, the target design is first digitized (i.e., the path of the needle is determined) and then embroidered in an automated manner. As discussed in Section 3, the selection of high-conductivity e-threads (see the resistivity comparison in Table 1) is the key to boosting the FSR’s sensitivity at low applied forces. Similarly to the above, we prototype two conductive sides and adhere Velostat in-between them using fabric adhesive. We expect that the improved conductivity of the embroidered (vs. the woven) surface, as has been extensively validated in the past [45,46], will improve the FSR’s performance. E-threads are also known to be much more tolerant to mechanical deformations, high/low temperatures, and laundering, adding to the superiority of the embroidered FSR.
3. Results
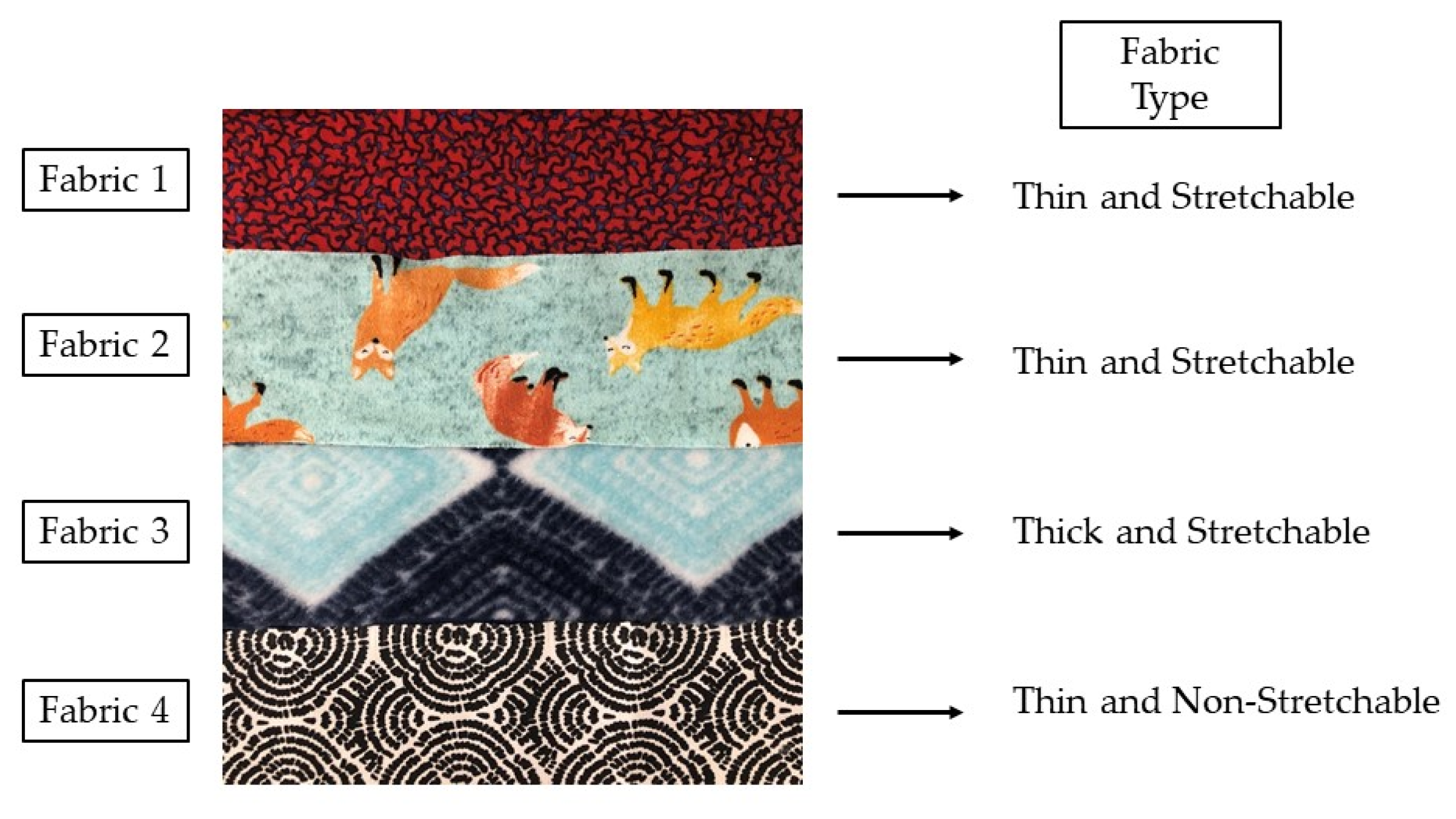
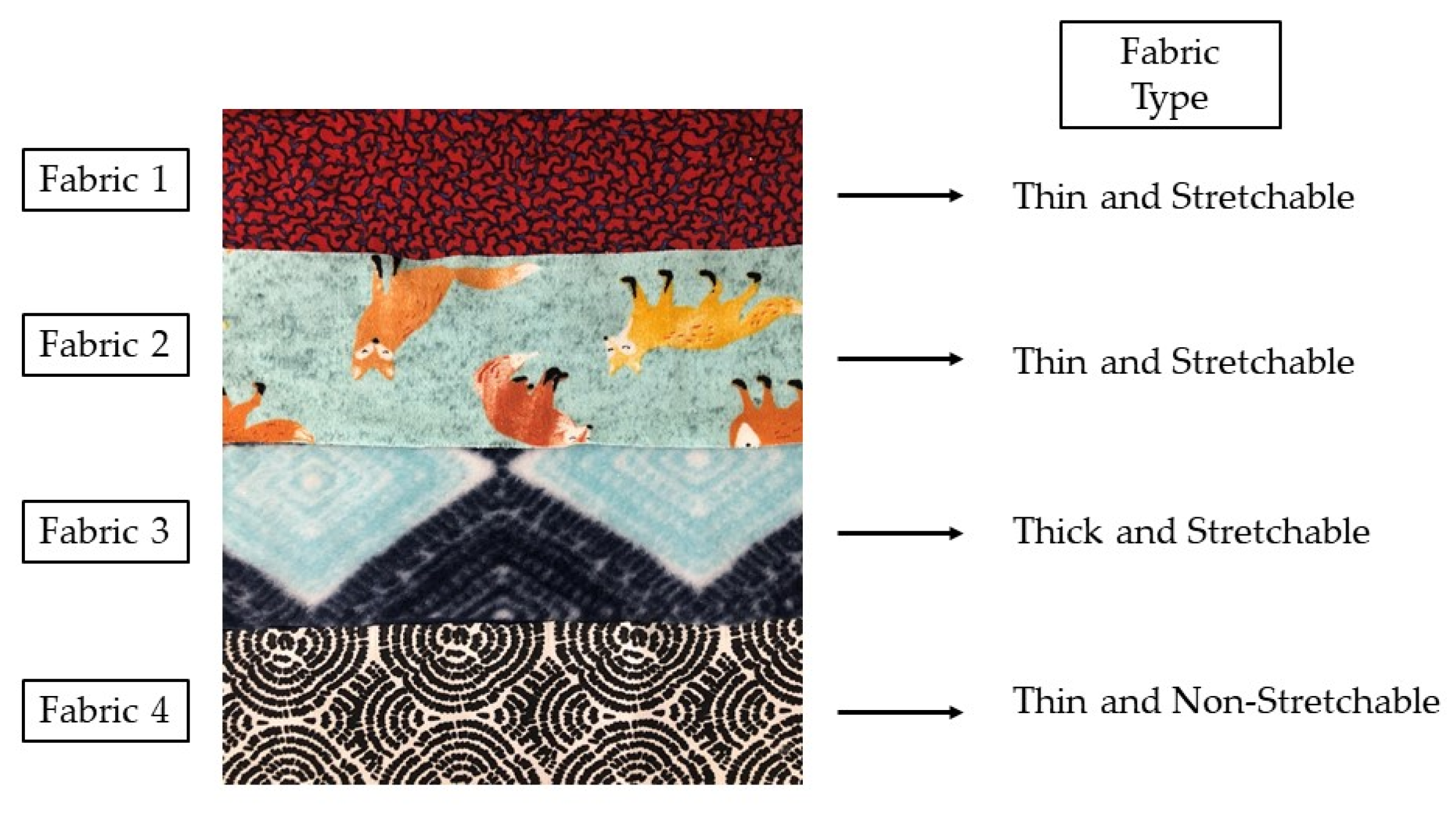
3.1. Optimization of the Fabric Selection
3.2. Optimization of the Sensor Placement
3.3. Demonstration of the Improved Sensitivity of the Embroidered FSR
3.4. Optimization of the Embroidery Density
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Nijhof, S.L.; Vinkers, C.H.; van Geelen, S.M.; Duijff, S.N.; Achterberg, E.J.M.; van der Net, J.; Veltkamp, R.C.; Grootenhuis, M.A.; van de Putte, E.M.; Hillegers, M.H.J.; et al. Healthy play, better coping: The importance of play for the development of children in health and disease. Neurosci. Biobehav. Rev. 2018, 95, 421–429. [Google Scholar] [CrossRef] [PubMed]
- ChildStats. Child Population, Table 1. 2018. Available online: https://www.childstats.gov/americaschildren/tables.asp (accessed on 4 June 2021).
- Kraus, L.; Lauer, E.; Coleman, R.; Houtenville, A. 2017 Disability Statistics Annual Report; University of New Hampshire: Durham, NH, USA, 2018. [Google Scholar]
- Zablotsky, B.; Black, L.; Maenner, M.; Schieve, L.; Danielson, M.; Bitsko, R.; Blumberg, S.; Kogan, M.; Boyle, C. Prevalence and Trends of Developmental Disabilities among Children in the United States: 2009–2017. Pediatrics 2019, 144, e20190811. [Google Scholar] [CrossRef] [PubMed]
- Gormley, M.E., Jr. Treatment of neuromuscular and musculoskeletal problems in cerebral palsy. Pediatr. Rehabil. 2001, 4, 5–16. [Google Scholar]
- Bilde, P.; Kliim-Due, M.; Rasmussen, B.; Petersen, L.; Petersen, T.; Nielsen, J. Individualized, home-based interactive training of cerebral palsy children delivered through the Internet. BMC Neurol. 2011, 11, 32. [Google Scholar] [CrossRef]
- Parkes, J.; McCusker, C. Common psychological problems in cerebral palsy. Paediatr. Child Health 2008, 18, 427–431. [Google Scholar] [CrossRef]
- Ginsburg, K. The Importance of Play in Promoting Healthy Child Development and Maintaining Strong Parent-Child Bonds. Pediatrics 2007, 119, 182–191. [Google Scholar] [CrossRef] [Green Version]
- Office of the United Nations High Commissioner for Human Rights. Convention on the Rights of the Child. General Assembly Resolution 44/25 of 20 November 1989. Available online: www.unhchr.ch/html/menu3/b/k2crc.htm (accessed on 6 June 2021).
- Tamis-LeMonda, C.; Shannon, J.; Cabrera, N.; Lamb, M. Fathers and Mothers at Play With Their 2- and 3-Year-Olds: Contributions to Language and Cognitive Development. Child Dev. 2004, 75, 1806–1820. [Google Scholar] [CrossRef]
- Lockhart, S. Play: An Important Tool for Cognitive Development. Ext. Curric. Newsl. Highscope 2010, 24, 1–8. [Google Scholar]
- Salonius-Pasternak, D.; Gelfond, H. The Next Level of Research on Electronic Play: Potential Benefits and Contextual Influences for Children and Adolescents. Hum. Technol. 2005, 1, 5–22. [Google Scholar] [CrossRef]
- Blumberg, F.C.; Deater-Deckard, K.; Calvert, S.L.; Flynn, R.M.; Green, C.S.; Arnold, D.; Brooks, P.J. Digital Games as a Context for Children’s Cognitive Development: Research Recommendations and Policy Considerations. Soc. Policy Rep. 2019, 32, 1–33. [Google Scholar] [CrossRef] [Green Version]
- Kanitkar, A.; Szturm, T.; Parmar, S.; Gandhi, D.B.; Rempel, G.R.; Restall, G.; Sharma, M.; Narayan, A.; Pandian, J.; Naik, N.; et al. The Effectiveness of a Computer Game-Based Rehabilitation Platform for Children With Cerebral Palsy: Protocol for a Randomized Clinical Trial. JMIR Res. Protoc. 2017, 6, e93. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, N.; Jearanaitanakij, K.; Selamat, A.; Trawiński, B.; Chittayasothorn, S. Intelligent Information and Database Systems; Springer: Cham, Swtizerland, 2020. [Google Scholar]
- Akhutina, T.; Foreman, N.; Krichevets, A.; Matikka, L.; Narhi, V.; Pylaeva, N.; Vahakuopus, J. Improving spatial functioning in children with cerebral palsy using computerized and traditional game tasks. Disabil. Rehabil. 2003, 25, 1361–1371. [Google Scholar] [CrossRef]
- Yan, F. A sunny day: Ann and Ron’s World an iPad Application for Children with Autism. In Serious Games Development and Applications, Proceedings of the Second International Conference, SGDA 2011, Lisbon, Portugal, 19–20 September 2011; Ma, M., Fradinho Oliveira, M., Madeiras Pereira, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 6944. [Google Scholar] [CrossRef]
- Whalen, C.; Moss, D.; Ilan, A.; Vaupel, M.; Fielding, P.; Macdonald, K.; Cernich, S.; Symon, J. Efficacy of TeachTown: Basics computer-assisted intervention for the Intensive Comprehensive Autism Program in Los Angeles Unified School District. Autism 2010, 14, 179–197. [Google Scholar] [CrossRef]
- Marwecki, S.; Rädle, R.; Reiterer, H. Encouraging collaboration in hybrid therapy games for autistic children. In Proceedings of the CHI’13 Extended Abstracts on Human Factors in Computing Systems CHI EA’13, Paris, France, 27 April–2 May 2013. [Google Scholar] [CrossRef] [Green Version]
- Ben-Sasson, A.; Lamash, L.; Gal, E. To enforce or not to enforce? The use of collaborative interfaces to promote social skills in children with high functioning autism spectrum disorder. Autism 2012, 17, 608–622. [Google Scholar] [CrossRef]
- Piper, A.M.; O’Brien, E.; Morris, M.R.; Winograd, T. SIDES: A Cooperative Tabletop Computer Game for Social Skills Development. In Proceedings of the 2006 20th Anniversary Conference on Computer Supported Cooperative Work—CSCW’06, Banff, AB, Canada, 4–8 November 2006. [Google Scholar] [CrossRef]
- Xbox Adaptive Controller. Available online: https://www.xbox.com/en-US/accessories/controllers/xbox-adaptive-controller (accessed on 14 June 2021).
- Controllers. Available online: https://store-jp.nintendo.com/list/hardware-accessory/controller/ (accessed on 14 June 2021).
- Combating Social Isolation through Play. Available online: https://ablegamers.org (accessed on 15 June 2021).
- Special Effect: The Games’ Charity. Available online: https://www.specialeffect.org.uk (accessed on 15 June 2021).
- Providing Enabling Solutions and Independence to Our Wounded & Severely Disabled Warfighters. Available online: https://warfighterengaged.org (accessed on 15 June 2021).
- Zain, N.H.B.M.; Jaafar, A. Integrating Digital Games Based Learning Environments with Eye Gaze-based Interaction. In Proceedings of the 2011 International Conference on Pattern Analysis and Intelligent Robotics, Putrajaya, Malaysia, 28–29 June 2011. [Google Scholar]
- Adamson, L.B.; Bakeman, R.; Deckner, D.F.; Romski, M. Joint engagement and the emergence of language in children with autism and Down syndrome. J. Autism Dev. Disord. 2009, 39, 84–96. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riquelme, I.; Hatem, S.M.; Montoya, P. Abnormal Pressure Pain, Touch Sensitivity, Proprioception, and Manual Dexterity in Children with Autism Spectrum Disorders. Neural Plast. 2016, 2016, 1723401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- David, F.J.; Baranek, G.T.; Wiesen, C.; Miao, A.F.; Thorpe, D.E. Coordination of precision grip in 2–6 years-old children with autism spectrum disorders compared to children developing typically and children with developmental disabilities. Front. Integr. Neurosci. 2012, 6, 122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lidstone, D.E.; Miah, F.Z.; Poston, B.; Beasley, J.F.; Dufek, J.S. Manual dexterity in children with autism spectrum disorder: A cross-syndrome approach. Res. Autism Spectr. Disord. 2020, 73, 101546. [Google Scholar] [CrossRef]
- Asakawa, D.; Crocker, G.; Schmaltz, A.; Jindrich, D. Fingertip forces and completion time for index finger and thumb touchscreen gestures. J. Electromyogr. Kinesiol. 2017, 34, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Aigner, R.; Pointner, A.; Preindl, T.; Parzer, P.; Haller, M. Embroidered Resistive Pressure Sensors: A Novel Approach for Textile Interfaces. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–13. [Google Scholar] [CrossRef]
- Rofouei, M.; Xu, W.; Sarrafzadeh, M. Computing with uncertainty in a smart textile surface for object recognition. In Proceedings of the 2010 IEEE Conference on Multisensor Fusion and Integration, Salt Lake City, UT, USA, 5–7 September 2010; pp. 174–179. [Google Scholar] [CrossRef]
- Honda, S.; Zhu, Q.; Satoh, S.; Arie, T.; Akita, S.; Takei, K. Textile-Based Flexible Tactile Force Sensor Sheet. Adv. Funct. Mater. 2019, 29, 1807957. [Google Scholar] [CrossRef]
- Saenz-Cogollo, J.F.; Pau, M.; Fraboni, B.; Bonfiglio, A. Pressure Mapping Mat for Tele-Home Care Applications. Sensors 2016, 16, 365. [Google Scholar] [CrossRef] [Green Version]
- Gu, G.; Xu, H.; Peng, S.; Li, L.; Chen, S.; Lu, T.; Guo, X. Integrated Soft Ionotronic Skin with Stretchable and Transparent Hydrogel–Elastomer Ionic Sensors for Hand-Motion Monitoring. Soft Robot. 2019, 6, 368–376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cai, G.; Wang, J.; Qian, K.; Chen, J.; Li, S.; Lee, P. Extremely Stretchable Strain Sensors Based on Conductive Self-Healing Dynamic Cross-Links Hydrogels for Human-Motion Detection. Adv. Sci. 2016, 4, 1600190. [Google Scholar] [CrossRef] [Green Version]
- Cameron, N. ESP32 microcontroller features. In Electronics Projects with the ESP8266 and ESP32; Apress: Berkeley, CA, USA, 2021. [Google Scholar] [CrossRef]
- Espressif Systems. ESP32 Series, Datasheet. 2021. Available online: https://www.espressif.com/sites/default/files/documentation/esp32_datasheet_en.pdf (accessed on 6 June 2021).
- Espressif Systems. ESP32 Technical Reference Manual. 2021. Available online: https://www.espressif.com/sites/default/files/documentation/esp32_technical_reference_manual_en.pdf (accessed on 2 June 2021).
- Costaud. Esp-iot Solution—Touch Sensor Application Note. Available online: https://github.com/espressif/esp-iot-solution/blob/release/v1.0/documents/touch_pad_solution/touch_sensor_design_en.md#touch-sensor-application-note (accessed on 12 June 2021).
- Adafruit Industries. Adafruit Learning System, Force Sensitive Resistor (FSR). Interlink 402 Model Datasheet. 2020. Available online: https://cdn-learn.adafruit.com/downloads/pdf/force-sensitive-resistor-fsr.pdf (accessed on 9 June 2021).
- Adafruit Industries, Shzhou Wanhe Electronic Co. Ltd., Conductive Fabric Plain. Part PT230 Datasheet. 2013. Available online: https://cdn-shop.adafruit.com/product-files/1168/Pn1168_Datasheet.pdf (accessed on 9 June 2021).
- Kiourti, A.; Lee, C.; Volakis, J. Fabrication of Textile Antennas and Circuits With 0.1 mm Precision. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 151–153. [Google Scholar] [CrossRef]
- Abbas, S.; Desai, S.; Esselle, K.; Volakis, J.; Hashmi, R. Design and Characterization of a Flexible Wideband Antenna Using Polydimethylsiloxane Composite Substrate. Int. J. Antennas Propag. 2018, 2018, 4095765. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Application | Dynamic Range Explored | Sensitivity 1 (Change in Resistance) from 0 to 5 N | E-Thread Resistivity (Ω/m) |
|---|---|---|---|---|
| This work | Collaborative gaming | <5 N | >8000 | 1.9 |
| [33] | Driving gloves | 0–20 N | 80 | 127 |
| [34] | Object Recognition | 0–30 N | 1000 | 200 (Ω/m2) |
| [35] | Respiration/Posture Monitoring | 0.56–56.7 N | 40 | - |
| [36] | Mobility Detection | 0–5 N | 1800 | 120 |
| Value in ESP32 GPIO/Touch Pin Register | ||||||
|---|---|---|---|---|---|---|
| Direct Skin | Fabric 1 | Fabric 2 | Fabric 3 | Fabric 4 | ||
| no touch | (a) | 15–18 | 23–24 | 26–27 | 26–27 | 24–26 |
| 1-finger touch | (b) | 0–2 | 1–3 | 1–2 | 1–2 | 1–2 |
| 2-finger touch | (c) | 0–1 | 1–2 | 1–2 | 0–1 | 1–2 |
| palmar side of hand touch | (d) | 0–1 | 1–2 | 1–3 | 0–2 | 1–2 |
| dorsal side of hand touch | (e) | 0–2 | 1–3 | 1–3 | 1–2 | 1–3 |
| Max. change in register value | (c)–(a) | 14–18 | 21–23 | 24–26 | 25–27 | 22–25 |
| Value in ESP32 GPIO/Touch Pin Register | |||||||
|---|---|---|---|---|---|---|---|
| Direct Skin | Fabric 1 | Fabric 2 | Fabric 3 | Fabric 4 | |||
| forearm | no touch | (a) | 15–18 | 23–24 | 26–27 | 26–27 | 24–26 |
| 1-finger touch | (b) | 0–2 | 1–3 | 1–2 | 1–2 | 1–2 | |
| palmar side of hand | no touch | (c) | 13–16 | 24–25 | 26–27 | 28–29 | 27–28 |
| 1-finger touch | (d) | 0–1 | 1–2 | 0–2 | 1–2 | 1–2 | |
| dorsal side of hand | no touch | (e) | 24–25 | 24–26 | 25–27 | 26–27 | 26–28 |
| 1-finger touch | (f) | 0–2 | 0–2 | 0–1 | 1–3 | 1–2 | |
| Max. change in register value | 22–25 (e)–(f) | 22–26 (e)–(f) | 24–27 (c)–(d) | 26–28 (c)–(d) | 25–27 (c)–(d) | ||
| Value in ESP32 GPIO/Touch Pin Register | ||||
|---|---|---|---|---|
| Off-the-Shelf FSR | Woven Fabric FSR | Embroidered FSR | ||
| no touch | (a) | 26–27 | 19–21 | 57–58 |
| 1-finger touch | (b) | 1–2 | 0–2 | 0–1 |
| 2-finger touch | (c) | 0–1 | 0–1 | 0–1 |
| palmar side of hand touch | (d) | 0–2 | 0–1 | 0–1 |
| dorsal side of hand touch | (e) | 1–2 | 0–1 | 0–1 |
| Max. change in register value | (a)–(c) | 25–27 | 18–21 | 56–58 |
| Off-the-Shelf FSR | Woven Fabric FSR | Embroidered FSR | |||||
|---|---|---|---|---|---|---|---|
| Trials | No. of Touches Registered | % Error | No. of Touches Registered | % Error | No. of Touches Registered | % Error | |
| 1-finger precision touch | 50 | 48 | 4% | 47 | 6% | 49 | 2% |
| 2-finger precision touch | 50 | 49 | 2% | 46 | 8% | 49 | 2% |
| 1-finger partial touch | 50 | 45 | 10% | 46 | 8% | 47 | 6% |
| 2-finger partial touch | 50 | 43 | 14% | 44 | 12% | 48 | 4% |
| random palm touch | 50 | 49 | 2% | 47 | 6% | 49 | 2% |
| center of palm touch | 50 | 26 | 48% | 36 | 28% | 42 | 16% |
| Value in ESP32 GPIO/Touch Pin Register | |||
|---|---|---|---|
| 1 e-Thread/mm | 4 e-Threads/mm | 7 e-Threads/mm | |
| no touch | 43–44 | 49–50 | 39–41 |
| 1-finger touch | 19–21 | 0–1 | 0–1 |
| Max. change in register value | 22–25 | 48–50 | 38–41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dontha, B.; Swearingen, K.; Swearingen, S.; Thrane, S.E.; Kiourti, A. Wearable Sensors Based on Force-Sensitive Resistors for Touch-Based Collaborative Digital Gaming. Sensors 2022, 22, 342. https://doi.org/10.3390/s22010342
Dontha B, Swearingen K, Swearingen S, Thrane SE, Kiourti A. Wearable Sensors Based on Force-Sensitive Resistors for Touch-Based Collaborative Digital Gaming. Sensors. 2022; 22(1):342. https://doi.org/10.3390/s22010342
Chicago/Turabian StyleDontha, Balaji, Kyoung Swearingen, Scott Swearingen, Susan E. Thrane, and Asimina Kiourti. 2022. "Wearable Sensors Based on Force-Sensitive Resistors for Touch-Based Collaborative Digital Gaming" Sensors 22, no. 1: 342. https://doi.org/10.3390/s22010342
APA StyleDontha, B., Swearingen, K., Swearingen, S., Thrane, S. E., & Kiourti, A. (2022). Wearable Sensors Based on Force-Sensitive Resistors for Touch-Based Collaborative Digital Gaming. Sensors, 22(1), 342. https://doi.org/10.3390/s22010342