
Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion


Abstract
:1. Introduction
2. Signal Model
2.1. LTE Positioning Signal Structure
2.1.1. Downlink Signal
2.1.2. Uplink Signal
2.2. Observable Calculation
2.2.1. Observable Based on Time of Arrival
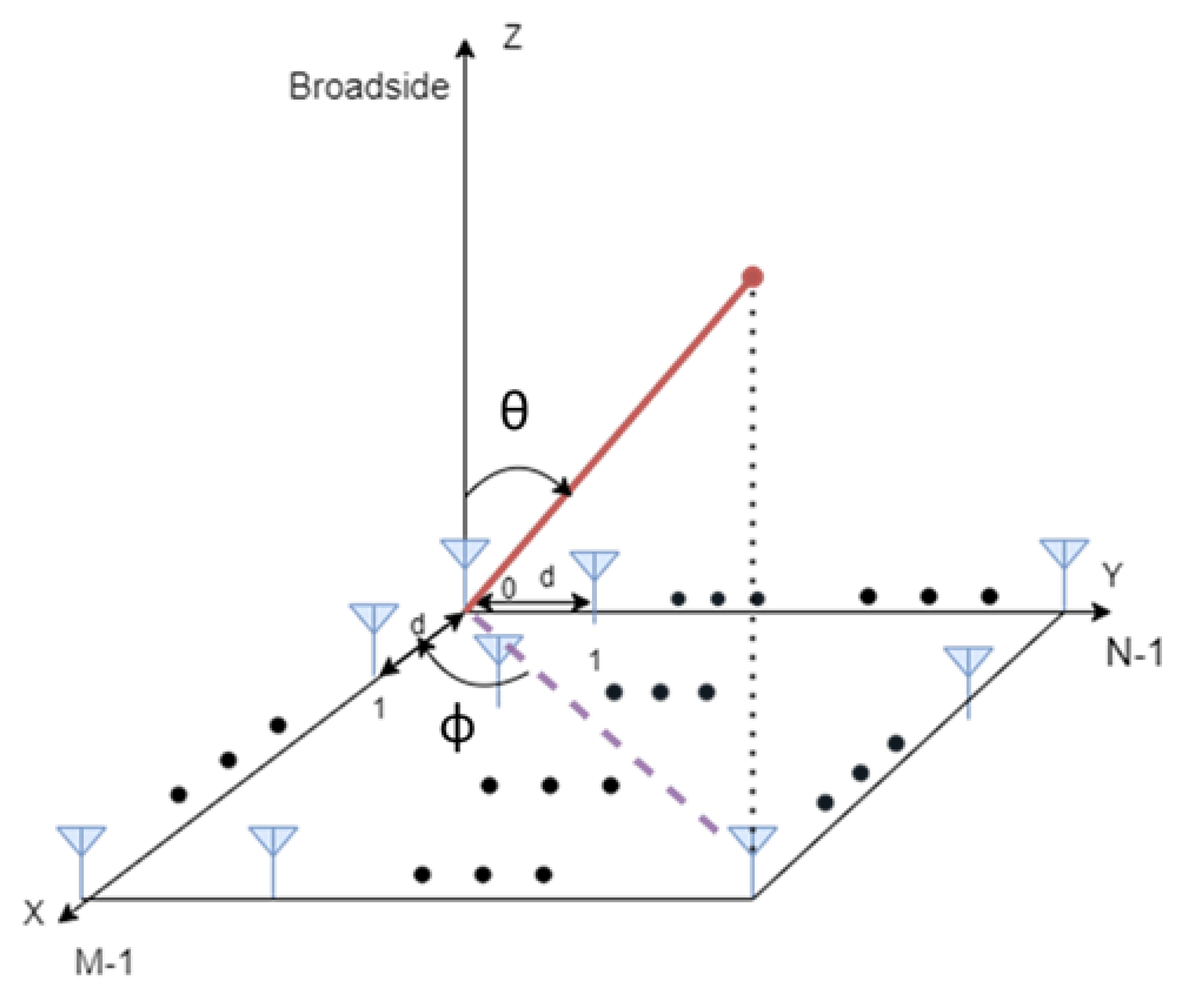
2.2.2. Observable Based on Angle of Arrival
3. Position Solution and Measurement Exclusion
3.1. Location Solution Based on Time of Arrival
3.2. Location Solution Based on Angle of Arrival
3.3. NLoS BS Exlusion Mechanism
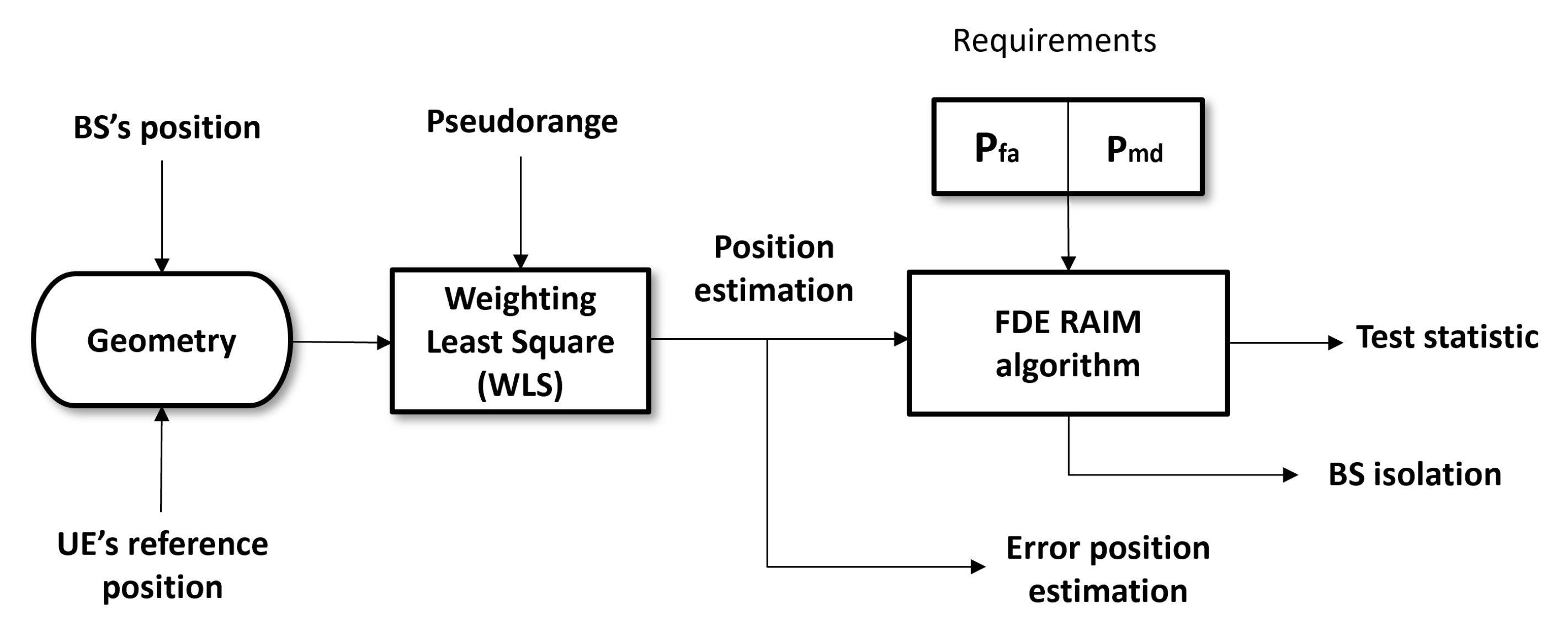
- Calculate the pseudo-range residuals using all BSs in the scenario. Large residuals indicate that a measurement error (bias) might be present. Generally, to perform a fault detection, there must be at least one redundant observation available. Since we are working with TDoA measurements, a minimum of four BSs are needed to compute a 3D position, five BSs to detect a failure and six BSs to detect and exclude the faulty BS.
- In order to distinguish between bias-free measurements and those subject to abnormal measurements, a measurable scalar parameter is defined to provide information about pseudo-range measurement errors. This parameter, named test statistic, is related to pseudo-range observations, and it is calculated as the normalized root sum square of the pseudo-range measurement residuals.
- The test statistic is then compared with a detection threshold T. If the test statistic exceeds the given threshold, a bias might be present in the measurements and the faulty BS identification is performed. Otherwise, the solution with all the BSs is used in the scenario.
- If a failure is detected, we create subsets of BSs by setting one BS as serving for the TDoA measurements and removing one BS from the rest of BSs at a time, so that there will be subsets, each having BSs. The detection of the failure is achieved by performing a consistency check through the test statistic parameter for each of the subsets. The subset with the minimum test statistic that does not exceeds the given threshold is chosen to perform the location computation.
- If the presence of degraded measurement errors is detected, but the faulty BS cannot be identified, the set of BSs that is used for the computation is selected to be the one whose test statistic is the smallest. The candidates’ BSs sets (on which the test statistic is calculated) include the subsets and also the original set with all the available BS in the scenario. In any case, in such situation when the faulty BS cannot be identified, we recognize that the positioning accuracy remains degraded and does not improve as expected.
3.3.1. Computation of Test Statistic
- : is accepted (no biased measurement error),
- : is accepted (biased measurement error).
3.3.2. The Selection of Threshold Parameter
| Algorithm 1 NLoS BS detection and exclusion. Procedure from 1 to 20 performs the algorithm with all the available BS, while procedure from 22 to 27 performs the algorithm excluding one BS at a time when the computed test statistic with all the available BS exceeds the given threshold |
Input: , , , , , , where Output:
|
4. Simulation Results and Evaluation
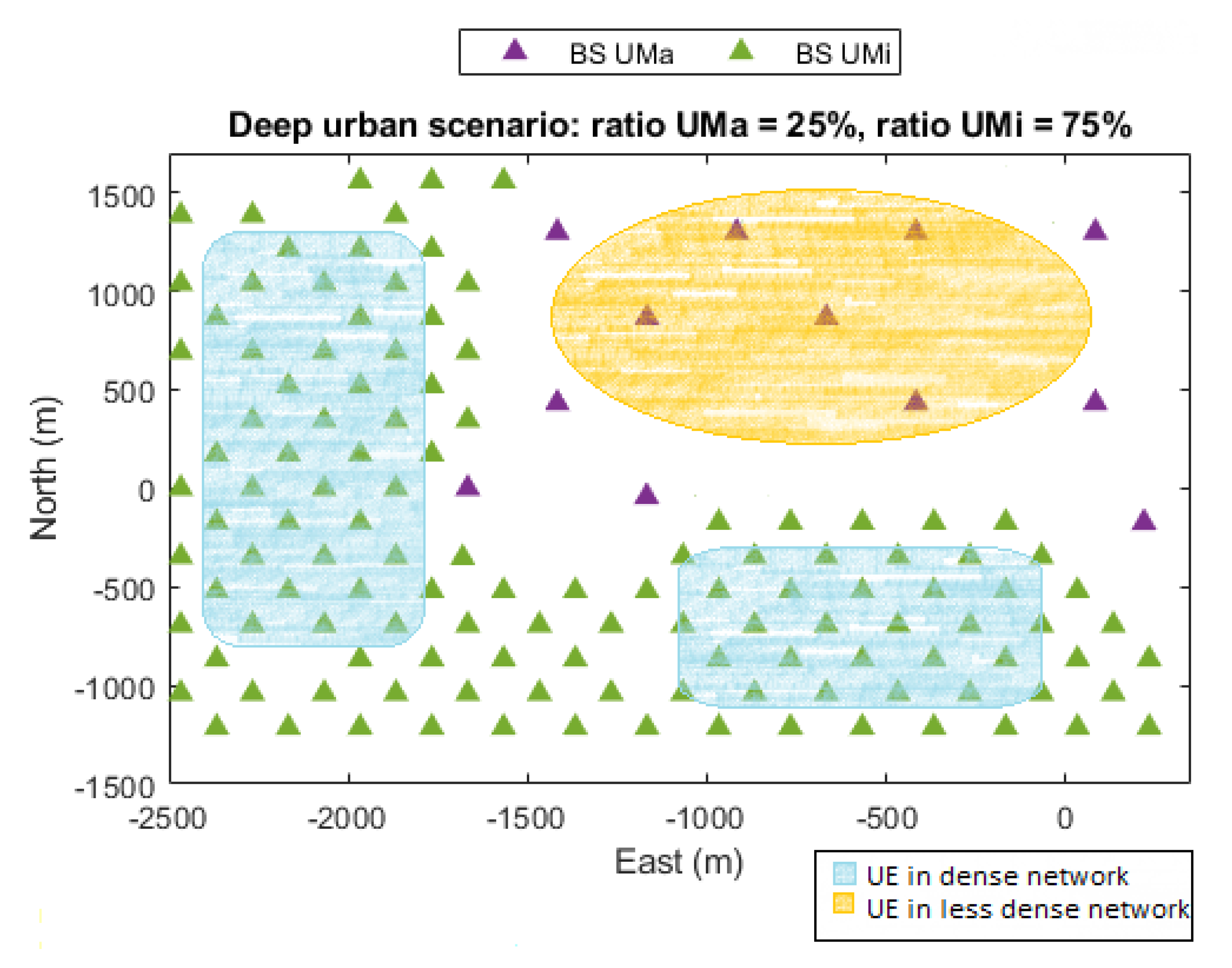
4.1. Scenario Definition
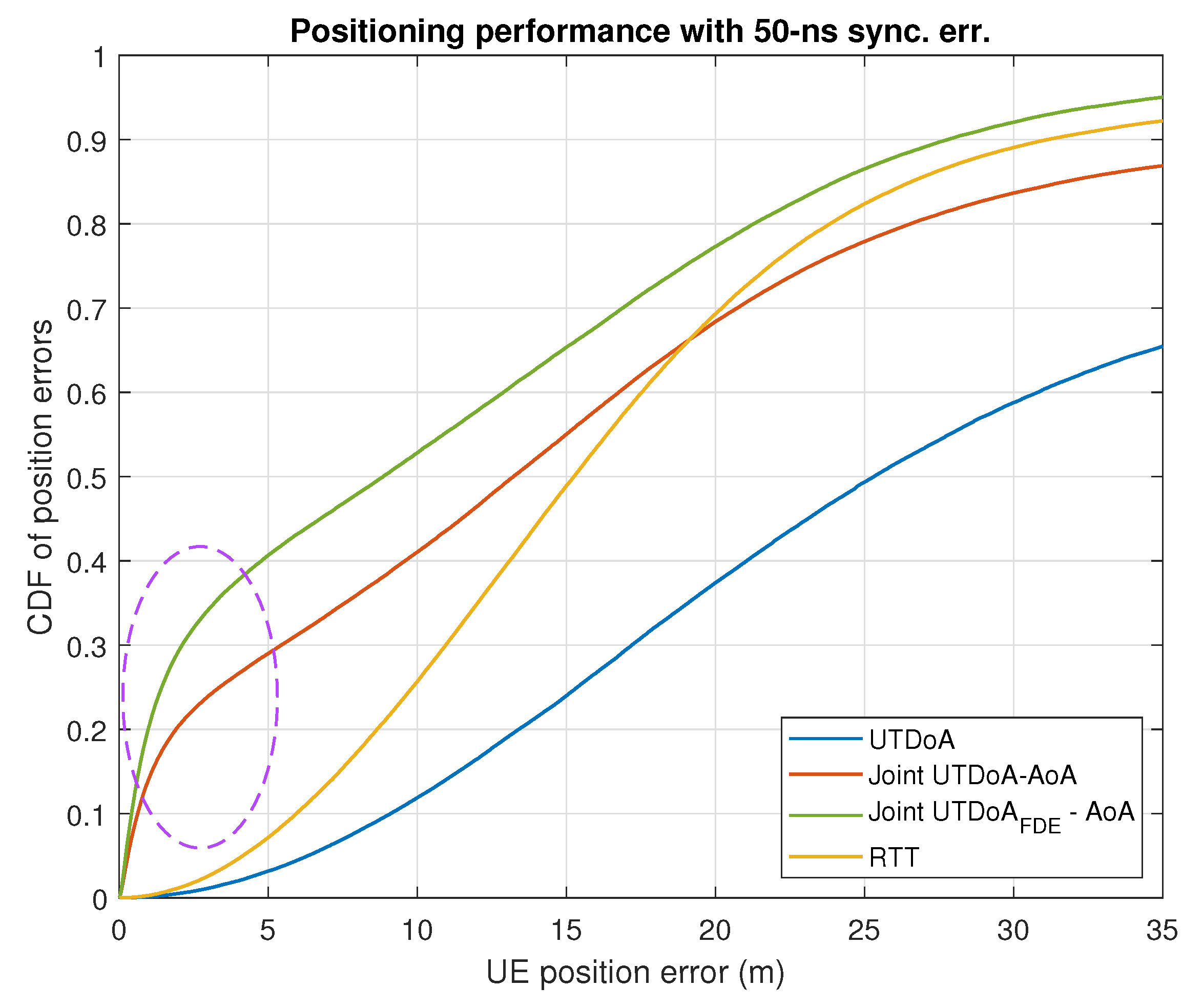
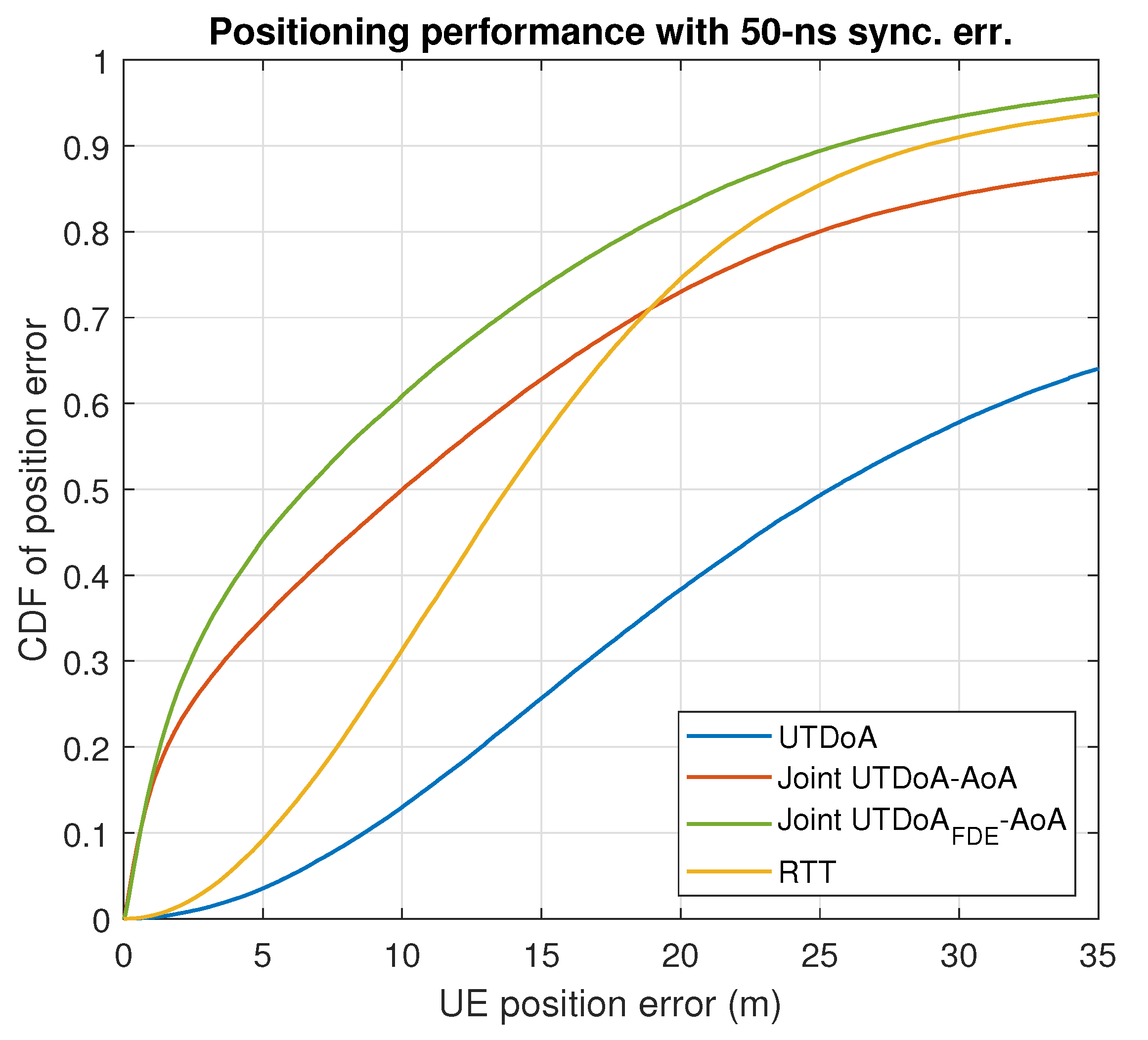
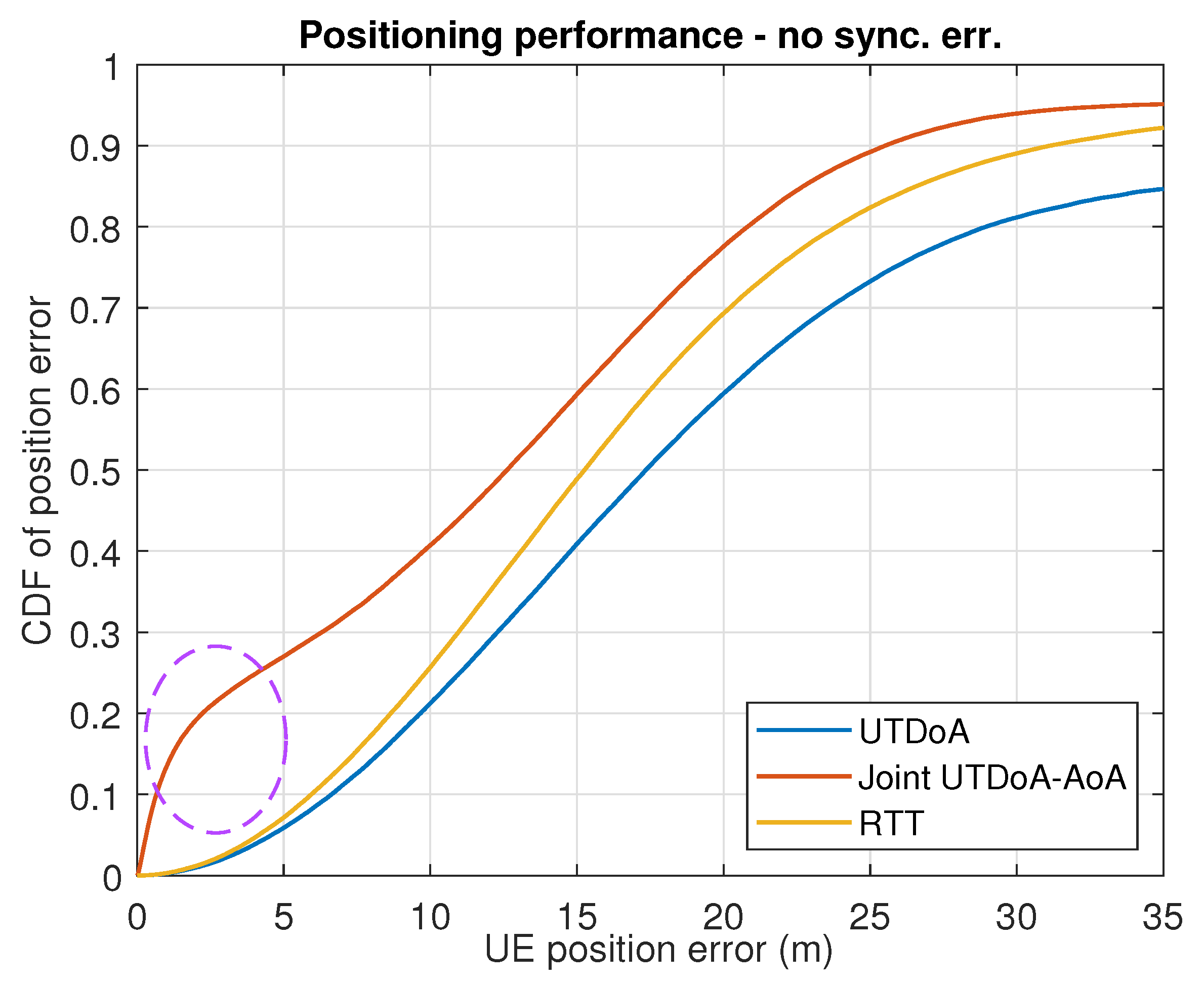
4.2. Performance Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- 3GPP. Study on Positioning Use Cases, Stage 1; Technical Report TR 22.872, V16.1.0; 3GPP: Sophia Antipolis, France, 2019. [Google Scholar]
- Ioannides, R.T.; Pany, T.; Gibbons, G. Known Vulnerabilities of Global Navigation Satellite Systems, Status, and Potential Mitigation Techniques. Proc. IEEE 2016, 104, 1174–1194. [Google Scholar] [CrossRef]
- De Angelis, G.; Baruffa, G.; Cacopardi, S. GNSS/Cellular Hybrid Positioning System for Mobile Users in Urban Scenarios. IEEE Trans. Intell. Transp. Syst. 2013, 14, 313–321. [Google Scholar] [CrossRef]
- Christian Mensing, S.S.; Dammann, A. Hybrid Data Fusion and Tracking for Positioning with GNSS and 3GPP-LTE. Int. J. Navig. Obs. 2010, 131–142. [Google Scholar] [CrossRef]
- Botteron Cyril, Firouzi Elham, F.P.A. Performance Analysis of Mobile Station Location Using Hybrid GNSS and Cellular Network Measurements. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 2458–2467. [Google Scholar]
- Dammann, A.; Raulefs, R.; Zhang, S. On prospects of positioning in 5G. In Proceedings of the IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 1207–1213. [Google Scholar]
- 3GPP. Study on NR Positioning; Technical Report TR 38.855, Rel. 16; 3GPP: Sophia Antipolis, France, 2019. [Google Scholar]
- del Peral-Rosado, J.A.; Gunnarsson, F.; Dwivedi, S.; Razavi, S.M.; Renaudin, O.; López-Salcedo, J.A.; Seco-Granados, G. Exploitation of 3D City Maps for Hybrid 5G RTT and GNSS Positioning Simulations. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 9205–9209. [Google Scholar] [CrossRef]
- Yin, J.; Wan, Q.; Yang, S.; Ho, K.C. A Simple and Accurate TDOA-AOA Localization Method Using Two Stations. IEEE Signal Process. Lett. 2016, 23, 144–148. [Google Scholar] [CrossRef]
- Bishop, A.N.; Fidan, B.; Doğançay, K.; Anderson, B.D.; Pathirana, P.N. Exploiting geometry for improved hybrid AOA/TDOA-based localization. Signal Process. 2008, 88, 1775–1791. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef] [Green Version]
- del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G.; Zanier, F.; Crisci, M. Achievable localization accuracy of the positioning reference signal of 3GPP LTE. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Starnberg, Germany, 25–27 June 2012; pp. 1–6. [Google Scholar]
- Shamaei, K.; Kassas, Z.M. LTE receiver design and multipath analysis for navigation in urban environments. Navigation 2018, 65, 655–675. [Google Scholar] [CrossRef]
- Wang, G.; Chen, H.; Li, Y.; Ansari, N. NLOS Error Mitigation for TOA-Based Localization via Convex Relaxation. IEEE Trans. Wirel. Commun. 2014, 13, 4119–4131. [Google Scholar] [CrossRef]
- 3GPP. 5G; NR; Physical Channels and Modulation; Technical Report TS 38.211, Rel. 16; 3GPP: Sophia Antipolis, France, 2020. [Google Scholar]
- del Peral-Rosado, J.A.; Renaudin, O.; Gentner, C.; Raulefs, R.; Dominguez-Tijero, E.; Fernandez-Cabezas, A.; Blazquez-Luengo, F.; Cueto-Felgueroso, G.; Chassaigne, A.; Bartlett, D.; et al. Physical-Layer Abstraction for Hybrid GNSS and 5G Positioning Evaluations. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- 3GPP. Study on Channel Model for Frequencies from 0.5 to 100 GHz; Technical Report TR 38.901, Re.14; 3GPP: Sophia Antipolis, France, 2017. [Google Scholar]
- Shamaei, K.; Kassas, Z.M. A Joint TOA and DOA Acquisition and Tracking Approach for Positioning With LTE Signals. IEEE Trans. Signal Process. 2021, 69, 2689–2705. [Google Scholar] [CrossRef]
- Xhafa, A.; del Peral-Rosado, J.A.; Seco-Granados, G.; López-Salcedo, J.A. Performance of NLOS Base Station Exclusion in cmWave 5G Positioning. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Axelrad, P. Autonomous GPS integrity monitoring using the pseudorange residual. Navigation 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Sturza, M. Fault Detection and Isolation (FDI) techniques for guidance and control systems. In NATO AGARD Graph GCP/AG.314, Analysis, Design and Synthesis Methods for Guidance and Control Systems; Science & Technology (S&T); NATO AGARD: Neuilly sur Seine, France, 1988. [Google Scholar]
- Grover Brown, R.; Chin, G.Y. Calculation of Thresholds and Protection Radius using Chi square methods-A geometric approach. Navigation 1997, V, 155–179. [Google Scholar]
- De Heus, J. Data-Snooping in control networks. In Proceedings of the Survey Control Networks, Meeting of the Study Group 5B, Aalborg, Denmark, 7–9 July 1982; pp. 211–224. [Google Scholar]
- Li, B.; Zhao, K.; Shen, X. Dilution of Precision in Positioning Systems Using Both Angle of Arrival and Time of Arrival Measurements. IEEE Access 2020, 8, 192506–192516. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Scenario 1 FR1, 20 MHz | Scenario 2 FR1, 50 MHz |
|---|---|---|
| Channel model | Baseline Channel Model based on common assumptions defined related to the channel models of 3GPP TR 38.901 | |
| Carrier frequency | 4 GHz | |
| System Bandwidth | 20 MHz | 50 MHz |
| Reference Signal | 1-symbol PRS, SRS | |
| Number of subcarrier | 1200 | 3300 |
| Number of sites | 7 (3-sector each) | |
| Antenna elements | M = N = 11 | |
| Network synchronization assumptions | Perfect sync. and realistic Sync. with T1 = 50 nsec | |
| Applied positioning algorithm | UTDoA, AoA, RTT joint UTDoA-AoA, joint UTDoA+FDE-AoA, Gauss–Newton algorithm | |
| Scenario 1 (%) | Scenario 2 (%) | ||
|---|---|---|---|
| UTDoA measurements | Sync. err. | 81.86 | |
| No sync. err. | 18.14 | ||
| BS for UTDoA positioning | One BS with sync. err. | 38.75 | |
| More than one BS with sync. err. | 43.11 | ||
| No BS with sync. err. | 18.14 | ||
| FDE performance | BS exclusion | 55.46 | 56.47 |
| BS no exclusion | 6.9 | 6.85 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xhafa, A.; del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G. Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion. Sensors 2022, 22, 101. https://doi.org/10.3390/s22010101
Xhafa A, del Peral-Rosado JA, López-Salcedo JA, Seco-Granados G. Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion. Sensors. 2022; 22(1):101. https://doi.org/10.3390/s22010101
Chicago/Turabian StyleXhafa, Alda, José A. del Peral-Rosado, José A. López-Salcedo, and Gonzalo Seco-Granados. 2022. "Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion" Sensors 22, no. 1: 101. https://doi.org/10.3390/s22010101
APA StyleXhafa, A., del Peral-Rosado, J. A., López-Salcedo, J. A., & Seco-Granados, G. (2022). Evaluation of 5G Positioning Performance Based on UTDoA, AoA and Base-Station Selective Exclusion. Sensors, 22(1), 101. https://doi.org/10.3390/s22010101