
V-Spline: An Adaptive Smoothing Spline for Trajectory Reconstruction



Abstract
1. Introduction
2. V-Spline
2.1. Objective Function
2.2. Basis Functions
2.3. Computing the V-Spline
2.4. Adaptive V-Spline
3. Parameter Selection and Cross-Validation
4. Simulation Study
5. Inference of Tractor Trajectory
5.1. The V-Spline in d-Dimensions
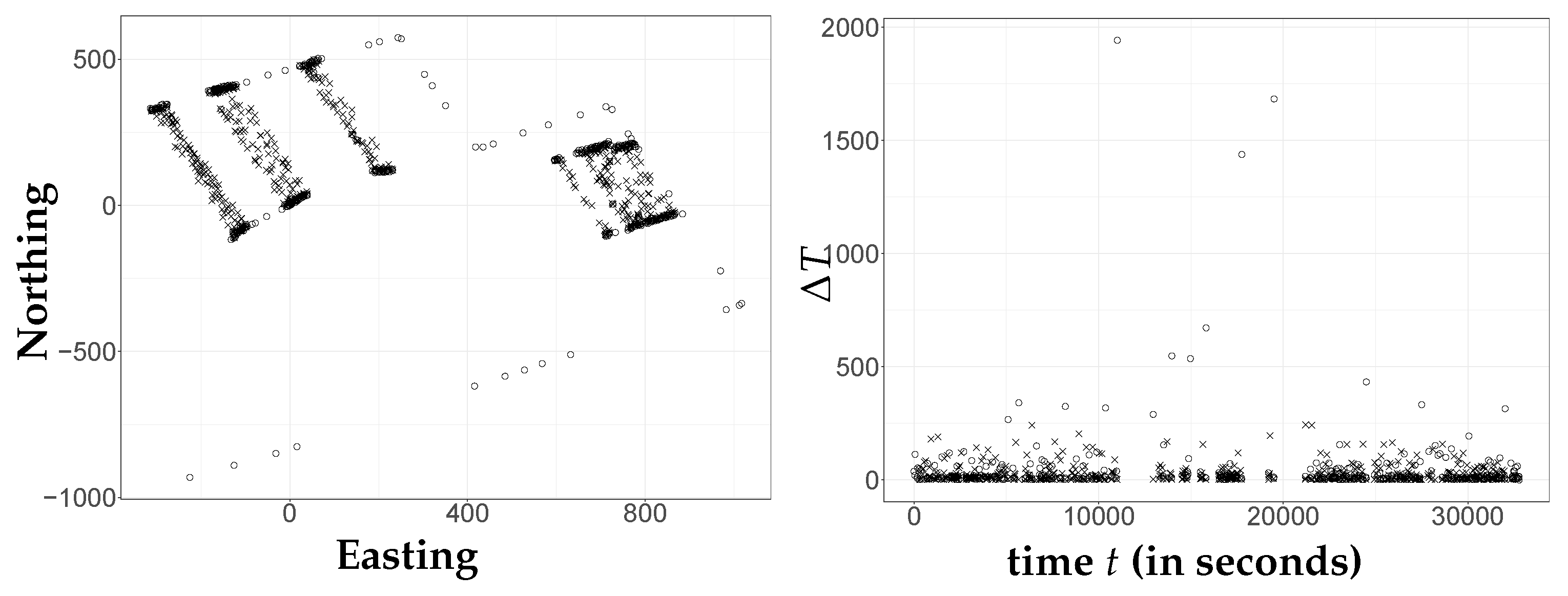
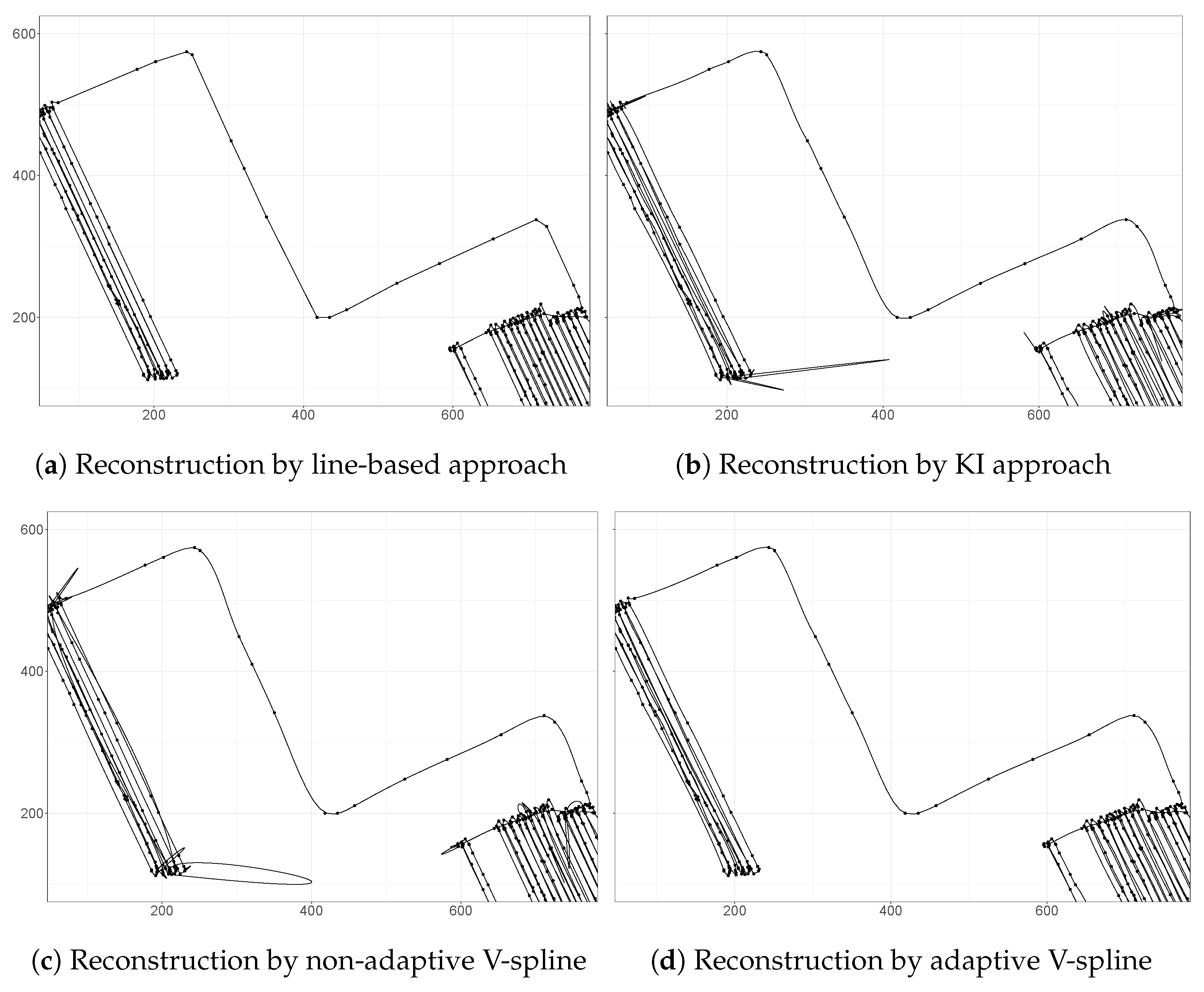
5.2. Two-Dimensional Trajectory Reconstruction
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GPS | Global Positioning System |
| CNC | Computer (or Computerised) Numerical Control |
| KI | Kinematic Interpolation |
| RSS | Residual Sum of Squares |
| CV | Cross Validation |
| GCV | Generalised Cross Validation |
| TMSE | True Mean Squared Errors |
| mNSE | modified Nash–Sutcliffe efficiency |
| SNR | Signal-to-Noise Ratio |
| UTM | Universal Transverse Mercator |
Appendix A. Penalty Matrix in (10)
Appendix B. Proof of Theorem 1
Appendix C. Proof of Theorem 2
References
- Grengs, J.; Wang, X.; Kostyniuk, L. Using GPS Data to Understand Driving Behavior. J. Urban Technol. 2008, 15, 33–53. [Google Scholar] [CrossRef]
- Kubo, N.; Hou, R.; Suzuki, T. Decimeter Level Vehicle Navigation Combining Multi-GNSS with Existing Sensors in Dense Urban Areas. In Proceedings of the 2014 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 450–459. [Google Scholar]
- Neményi, M.; Mesterházi, P.Á.; Pecze, Z.; Stépán, Z. The Role of GIS and GPS in Precision Farming. Comput. Electron. Agric. 2003, 40, 45–55. [Google Scholar] [CrossRef]
- Sun, Q.C.; Odolinski, R.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Validating the Efficacy of GPS Tracking Vehicle Movement for Driving Behaviour Assessment. Travel Behav. Soc. 2017, 6, 32–43. [Google Scholar] [CrossRef]
- Martin, A.; Parry, M.; Soundy, A.W.R.; Panckhurst, B.J.; Brown, P.; Molteno, T.C.A.; Schumayer, D. Improving Real-Time Position Estimation Using Correlated Noise Models. Sensors 2020, 20, 5913. [Google Scholar] [CrossRef]
- Zito, R.; D’este, G.; Taylor, M.A.P. Global Positioning Systems in the Time Domain: How Useful a Tool for Intelligent Vehicle-Highway Systems? Transp. Res. Part C Emerg. Technol. 1995, 3, 193–209. [Google Scholar] [CrossRef]
- Gates, T.J.; Schrock, S.D.; Bonneson, J.A. Comparison of Portable Speed Measurement Devices. Transp. Res. Rec. J. Transp. Res. 2004, 1870, 139–146. [Google Scholar] [CrossRef]
- Ye, Q.; Szeto, W.Y.; Wong, S.C. Short-Term Traffic Speed Forecasting Based on Data Recorded at Irregular Intervals. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1727–1737. [Google Scholar] [CrossRef]
- Jun, J.; Guensler, R.; Ogle, J.H. Smoothing Methods to Minimize Impact of Global Positioning System Random Error on Travel Distance, Speed, and Acceleration Profile Estimates. Transp. Res. Rec. 2006, 1972, 141–150. [Google Scholar] [CrossRef]
- Komoriya, K.; Tanie, K. Trajectory Design and Control of a Wheel-Type Mobile Robot Using B-Spline Curve. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems ’. (IROS ’89) ’The Autonomous Mobile Robots and Its Applications, Tsukuba, Japan, 4–6 September 1989; pp. 398–405. [Google Scholar] [CrossRef]
- Ben-Arieh, D.; Chang, S.; Rys, M.; Zhang, G. Geometric Modeling of Highways Using Global Positioning System Data and B-Spline Approximation. J. Transp. Eng. 2004, 130, 632–636. [Google Scholar] [CrossRef]
- Erkorkmaz, K.; Altintas, Y. High Speed CNC System Design. Part I: Jerk Limited Trajectory Generation and Quintic Spline Interpolation. Int. J. Mach. Tools Manuf. 2001, 41, 1323–1345. [Google Scholar] [CrossRef]
- Yu, B.; Kim, S.H.; Bailey, T.; Gamboa, R. Curve-Based Representation of Moving Object Trajectories. In Database Engineering and Applications Symposium, 2004. IDEAS’04. Proceedings International; IEEE: Coimbra, Portugal, 2004; pp. 419–425. [Google Scholar] [CrossRef]
- Zhang, K.; Guo, J.X.; Gao, X.S. Cubic Spline Trajectory Generation with Axis Jerk and Tracking Error Constraints. Int. J. Precis. Eng. Manuf. 2013, 14, 1141–1146. [Google Scholar] [CrossRef]
- Walambe, R.; Agarwal, N.; Kale, S.; Joshi, V. Optimal Trajectory Generation for Car-Type Mobile Robot Using Spline Interpolation. IFAC-PapersOnLine 2016, 49, 601–606. [Google Scholar] [CrossRef]
- Long, J.A. Kinematic Interpolation of Movement Data. Int. J. Geogr. Inf. Sci. 2016, 30, 854–868. [Google Scholar] [CrossRef]
- Ma, L.; Tian, S.; Song, Y.; Wu, Z.; Yue, M. An Approach of ACARS Trajectory Reconstruction Based on Adaptive Cubic Spline Interpolation. In International Conference on Security, Privacy and Anonymity in Computation, Communication and Storage; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11637, pp. 245–252. [Google Scholar] [CrossRef]
- Hintzen, N.T.; Piet, G.J.; Brunel, T. Improved Estimation of Trawling Tracks Using Cubic Hermite Spline Interpolation of Position Registration Data. Fish. Res. 2010, 101, 108–115. [Google Scholar] [CrossRef]
- Jia, R.Q.; Liu, S.T. Wavelet Bases of Hermite Cubic Splines on the Interval. Adv. Comput. Math. 2006, 25, 23–39. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, J.M. Ideal Spatial Adaptation by Wavelet Shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Craven, P.; Wahba, G. Smoothing Noisy Data with Spline Functions. Numer. Math. 1978, 31, 377–403. [Google Scholar] [CrossRef]
- Green, P.J.; Silverman, B.W. Nonparametric Regression and Generalized Linear Models: A Roughness Penalty Approach; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar] [CrossRef]
- Aydin, D.; Tuzemen, M.S. Smoothing Parameter Selection Problem in Nonparametric Regression Based on Smoothing Spline: A Simulation Study. J. Appl. Sci. 2012, 12, 636. [Google Scholar] [CrossRef][Green Version]
- Schwarz, K.P. Geodesy Beyond 2000: The Challenges of the First Decade, IAG General Assembly Birmingham, July 19–30, 1999; Springer Science & Business Media: New York, NY, USA, 2012; Volume 121. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2009; p. 533. [Google Scholar] [CrossRef]
- Gu, C. Model Indexing and Smoothing Parameter Selection in Nonparametric Function Estimation. Stat. Sin. 1998, 8, 607–623. [Google Scholar]
- Donoho, D.L.; Johnstone, I.M. Adapting to Unknown Smoothness via Wavelet Shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200–1224. [Google Scholar] [CrossRef]
- Abramovich, F.; Sapatinas, T.; Silverman, B.W. Wavelet Thresholding via a Bayesian Approach. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 1998, 60, 725–749. [Google Scholar] [CrossRef]
- Krivobokova, T.; Crainiceanu, C.M.; Kauermann, G. Fast Adaptive Penalized Splines. J. Comput. Graph. Stat. 2008, 17, 1–20. [Google Scholar] [CrossRef][Green Version]
- Ruppert, D.; Wand, M.P.; Carroll, R.J. Semiparametric Regression; Cambridge Series in Statistical and Probabilistic Mathematics; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar] [CrossRef]
- Wiesenfarth, M.; Krivobokova, T.; Klasen, S.; Sperlich, S. Direct Simultaneous Inference in Additive Models and Its Application to Model Undernutrition. J. Am. Stat. Assoc. 2012, 107, 1286–1296. [Google Scholar] [CrossRef][Green Version]
- Wood, S.N.; Pya, N.; Säfken, B. Smoothing Parameter and Model Selection for General Smooth Models. J. Am. Stat. Assoc. 2016, 111, 1548–1563. [Google Scholar] [CrossRef]
- Wood, S.N. Generalized Additive Models: An Introduction with R, 2nd ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Nason, G. Wavelet Methods in Statistics with R; Springer Science & Business Media: New York, NY, USA, 2010. [Google Scholar]
- Krause, P.; Boyle, D.P.; Bäse, F. Comparison of Different Efficiency Criteria for Hydrological Model Assessment. In Advances in Geosciences; Copernicus GmbH: Antalya, Turkey, 2005; Volume 5, pp. 89–97. [Google Scholar] [CrossRef]
- Team, R.C. R: A Language and Environment for Statistical Computing. In R Foundation for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TMSE () | SNR | Adpt VS | Non-Adpt VS | VS | P-Spline | gam | KI |
|---|---|---|---|---|---|---|---|
| Blocks | 7 | 1.753 * | 1.778 | 54.257 | 52.702 | 53.224 | 826.497 |
| 3 | 17.036 | 15.339 * | 152.391 | 145.118 | 154.467 | 4499.818 | |
| Bumps | 7 | 1.701 | 1.568 * | 23.436 | 23.447 | 23.446 | 219.259 |
| 3 | 8.865 * | 8.980 | 77.774 | 78.808 | 76.080 | 1193.743 | |
| HeaviSine | 7 | 1.558 * | 1.562 | 7.768 | 9.337 | 7.873 | 207.412 |
| 3 | 4.360 * | 8.557 | 33.492 | 34.361 | 33.132 | 1129.242 | |
| Doppler | 7 | 1.516 | 0.956 * | 6.668 | 6.406 | 6.435 | 56.910 |
| 3 | 8.092 * | 8.255 | 22.135 | 22.088 | 22.655 | 309.842 |
| mNSE | SNR | Adpt VS | Non-Adpt VS | VS | P-Spline | gam | KI |
|---|---|---|---|---|---|---|---|
| Blocks | 7 | 0.9954 * | 0.9953 | 0.9749 | 0.9750 | 0.9752 | 0.9037 |
| 3 | 0.9864 * | 0.9870 | 0.9562 | 0.9569 | 0.9555 | 0.7753 | |
| Bumps | 7 | 0.9917 | 0.9921 * | 0.9700 | 0.9700 | 0.9703 | 0.9097 |
| 3 | 0.9811 * | 0.9810 | 0.9442 | 0.9428 | 0.9443 | 0.7893 | |
| HeaviSine | 7 | 0.9915 * | 0.9915 | 0.9820 | 0.9802 | 0.9818 | 0.9058 |
| 3 | 0.9855 * | 0.9802 | 0.9624 | 0.9617 | 0.9625 | 0.7803 | |
| Doppler | 7 | 0.9820 | 0.9857 * | 0.9646 | 0.9648 | 0.9646 | 0.8928 |
| 3 | 0.9579 * | 0.9575 | 0.9347 | 0.9333 | 0.9323 | 0.7499 |
| SNR | True Value | f Known | V-Spline |
|---|---|---|---|
| Blocks | 7 | 6.9442 | 6.9485 |
| 3 | 2.9761 | 2.9817 | |
| Bumps | 7 | 6.9442 | 6.9548 |
| 3 | 2.9761 | 2.9953 | |
| HeaviSine | 7 | 6.9442 | 6.9207 |
| 3 | 2.9761 | 2.9891 | |
| Doppler | 7 | 6.9442 | 6.8757 |
| 3 | 2.9761 | 2.9372 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Z.; Bryant, D.; Molteno, T.C.A.; Fox, C.; Parry, M. V-Spline: An Adaptive Smoothing Spline for Trajectory Reconstruction. Sensors 2021, 21, 3215. https://doi.org/10.3390/s21093215
Cao Z, Bryant D, Molteno TCA, Fox C, Parry M. V-Spline: An Adaptive Smoothing Spline for Trajectory Reconstruction. Sensors. 2021; 21(9):3215. https://doi.org/10.3390/s21093215
Chicago/Turabian StyleCao, Zhanglong, David Bryant, Timothy C.A. Molteno, Colin Fox, and Matthew Parry. 2021. "V-Spline: An Adaptive Smoothing Spline for Trajectory Reconstruction" Sensors 21, no. 9: 3215. https://doi.org/10.3390/s21093215
APA StyleCao, Z., Bryant, D., Molteno, T. C. A., Fox, C., & Parry, M. (2021). V-Spline: An Adaptive Smoothing Spline for Trajectory Reconstruction. Sensors, 21(9), 3215. https://doi.org/10.3390/s21093215