
Tackling Heterogeneous Color Registration: Binning Color Sensors



Abstract
1. Introduction
2. Materials and Methods
2.1. Sensor-Based Color Registration and Related Issues
2.2. New Binning Approach for Color Sensors
3. Results
3.1. Impact of Probe Stimuli on Cluster Results
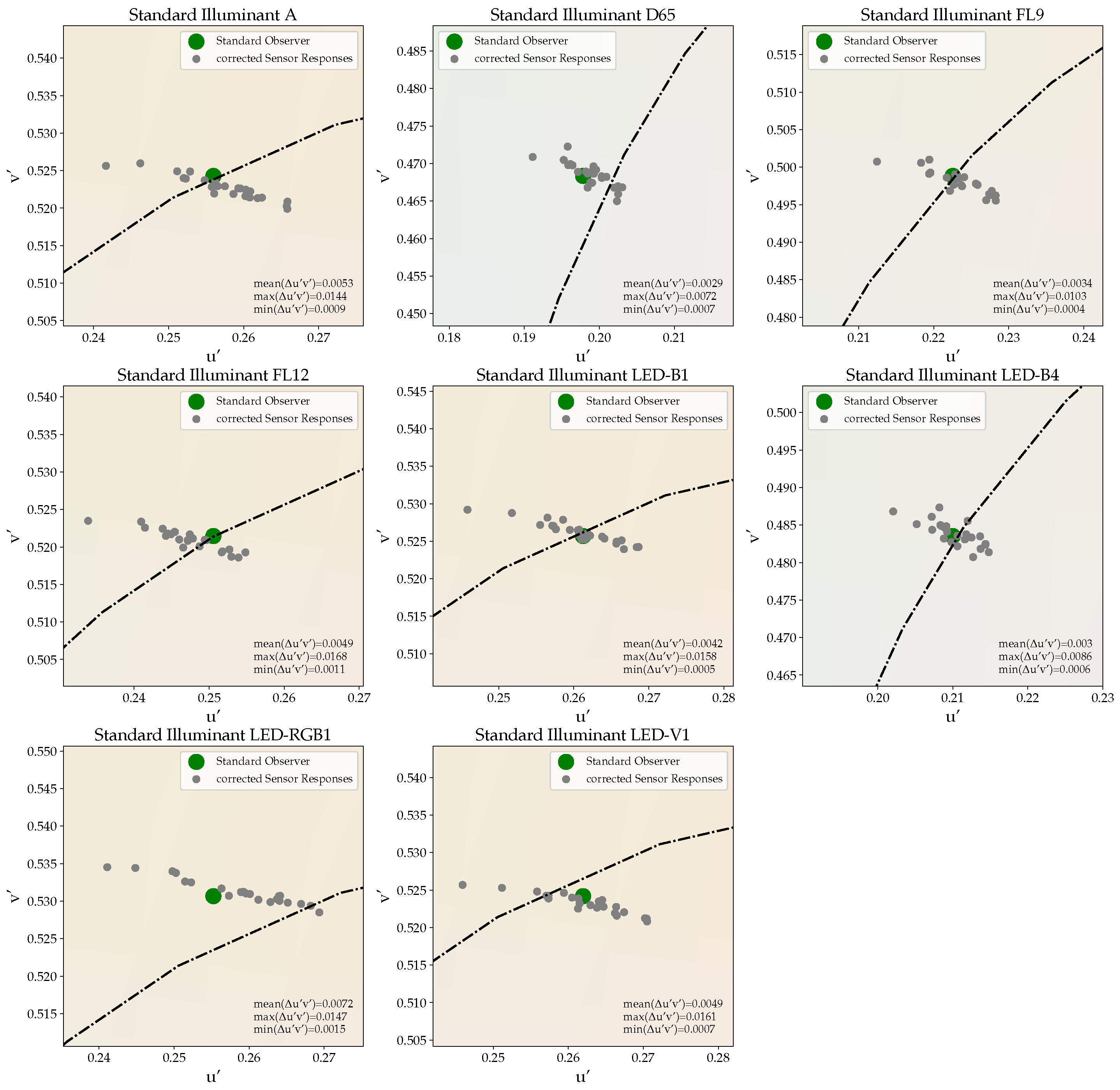
3.2. Performance Evaluation of Sensor Binning
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LED | Light-emitting diode |
| CCT | Correlated color temperature |
| CIE | Commission Internationale de l’Éclairage |
| CMOS | Complementary metal-oxide-semiconductor |
| IES | Illuminating Engineering Society |
| TM | Technical memorandum |
| FWHM | Full width at half maximum |
| PTFE | Polytetrafluoroethylene |
| ANOVA | Analysis of variance |
| ANSI | American National Standards Institute |
| PAR | Photosynthetically active radiation |
References
- Zandi, B.; Eissfeldt, A.; Herzog, A.; Khanh, T.Q. Melanopic limits of metamer spectral optimisation in multi-channel smart lighting systems. Energies 2021, 14, 527. [Google Scholar] [CrossRef]
- Chew, I.; Kalavally, V.; Tan, C.P.; Parkkinen, J. A spectrally tunable smart LED lighting system with closed-loop control. IEEE Sens. J. 2016, 16, 4452–4459. [Google Scholar] [CrossRef]
- Kandasamy, N.K.; Karunagaran, G.; Spanos, C.; Tseng, K.J.; Soong, B.H. Smart lighting system using ANN-IMC for personalized lighting control and daylight harvesting. Build. Environ. 2018, 139, 170–180. [Google Scholar] [CrossRef]
- Beccali, M.; Bonomolo, M.; Ciulla, G.; Lo Brano, V. Assessment of indoor illuminance and study on best photosensors’ position for design and commissioning of Daylight Linked Control systems. A new method based on artificial neural networks. Energy 2018, 154, 466–476. [Google Scholar] [CrossRef]
- Pandharipande, A.; Newsham, G.R. Lighting controls: Evolution and revolution. Light. Res. Technol. 2018, 50, 115–128. [Google Scholar] [CrossRef]
- Li, S.; Pandharipande, A.; Willems, F.M.J. Daylight Sensing LED Lighting System. IEEE Sens. J. 2016, 16, 3216–3223. [Google Scholar] [CrossRef]
- Maiti, P.K.; Roy, B. Evaluation of a daylight-responsive, iterative, closed-loop light control scheme. Light. Res. Technol. 2020, 50, 257–273. [Google Scholar] [CrossRef]
- Seyedolhosseini, A.; Masoumi, N.; Modarressi, M.; Karimian, N. Daylight adaptive smart indoor lighting control method using artificial neural networks. J. Build. Eng. 2020, 29, 101141. [Google Scholar] [CrossRef]
- Galasiu, A.D.; Veitch, J.A. Occupant preferences and satisfaction with the luminous environment and control systems in daylit offices: A literature review. Energy Build. 2006, 38, 728–742. [Google Scholar] [CrossRef]
- Nicol, F.; Wilson, M.; Chiancarella, C. Using field measurements of desktop illuminance in European offices to investigate its dependence on outdoor conditions and its effect on occupant satisfaction, and the use of lights and blinds. Energy Build. 2006, 38, 802–813. [Google Scholar] [CrossRef]
- Bunjongjit, S.; Ngaopitakkul, A. Feasibility study and impact of daylight on illumination control for energy-saving lighting systems. Sustainability 2018, 10, 4075. [Google Scholar] [CrossRef]
- Shailesh, K.R.; Kurian, C.P.; Kini, S.G. Understanding the reliability of LED luminaires. Light. Res. Technol. 2018, 50, 1179–1197. [Google Scholar] [CrossRef]
- Padmasali, A.N.; Kini, S.G. A lifetime performance analysis of LED luminaires under real-operation profiles. IEEE Trans. Electron Devices 2020, 67, 146–153. [Google Scholar] [CrossRef]
- Zhang, R.; Wu, X.; Chung, H.S.H.; Pan, X. A color-theory-based chromaticity coordinates tracking strategy for LED color-mixing system. IEEE Trans. Power Electron. 2021, 36, 3269–3278. [Google Scholar] [CrossRef]
- Hughes, R.F.; Dhannu, S.S. Substantial energy savings through adaptive lighting. In Proceedings of the 2008 IEEE Canada Electric Power Conference, Vancouver, BC, Canada, 6–7 October 2008. [Google Scholar] [CrossRef]
- Fernández-Montes, A.; Gonzalez-Abril, L.; Ortega, J.A.; Morente, F.V. A study on saving energy in artificial lighting by making smart use of wireless sensor networks and actuators. IEEE Netw. 2009, 23, 16–20. [Google Scholar] [CrossRef]
- Matta, S.; Mahmud, S.M. An intelligent light control system for power saving. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 3316–3321. [Google Scholar] [CrossRef]
- Chiogna, M.; Mahdavi, A.; Albatici, R.; Frattari, A. Energy efficiency of alternative lighting control systems. Light. Res. Technol. 2012, 44, 397–415. [Google Scholar] [CrossRef]
- Caicedo, D.; Pandharipande, A. Daylight and occupancy adaptive lighting control system: An iterative optimization approach. Light. Res. Technol. 2016, 48, 661–675. [Google Scholar] [CrossRef]
- Kompier, M.; Smolders, K.; de Kort, Y. A systematic literature review on the rationale for and effects of dynamic light scenarios. Build. Environ. 2020, 186, 107326. [Google Scholar] [CrossRef]
- Figueiro, M.G.; Steverson, B.; Heerwagen, J.; Kampschroer, K.; Hunter, C.M.; Gonzales, K.; Plitnick, B.; Rea, M.S. The impact of daytime light exposures on sleep and mood in office workers. Sleep Health 2017, 3, 204–215. [Google Scholar] [CrossRef]
- Stefani, O.; Freyburger, M.; Veitz, S.; Basishvili, T.; Meyer, M.; Weibel, J.; Kobayashi, K.; Shirakawa, Y.; Cajochen, C. Changing color and intensity of LED lighting across the day impacts on circadian melatonin rhythms and sleep in healthy men. J. Pineal Res. 2020, 70, e12714. [Google Scholar] [CrossRef]
- Papatsimpa, C.; Linnartz, J.P. Personalized office lighting for circadian health and improved sleep. Sensors 2020, 20, 4569. [Google Scholar] [CrossRef]
- de Kort, Y.A.W.; Smolders, K.C.H.J. Effects of dynamic lighting on office workers: First results of a field study with monthly alternating settings. Light. Res. Technol. 2010, 42, 345–360. [Google Scholar] [CrossRef]
- Aries, M.B.C.; Beute, F.; Fischl, G. Assessment protocol and effects of two dynamic light patterns on human well-being and performance in a simulated and operational office environment. J. Environ. Psychol. 2020, 69, 101409. [Google Scholar] [CrossRef]
- Khanh, T.Q.; Bodrogi, P.; Guo, X.; Vinh, Q.T.; Fischer, S. Colour Preference, Naturalness, Vividness and Colour Quality Metrics, Part 5: A Colour Preference Experiment at 2000 lx in a Real Room. Light. Res. Technol. 2019, 51, 262–279. [Google Scholar] [CrossRef]
- Bodrogi, P.; Guo, X.; Stojanovic, D.; Fischer, S.; Khanh, T.Q. Observer preference for perceived illumination chromaticity. Color Res. Appl. 2018, 43, 506–516. [Google Scholar] [CrossRef]
- Khanh, T.Q.; Bodrogi, P.; Guo, X.; Anh, P.Q. Towards a user preference model for interior lighting. Part 2: Experimental results and modelling. Light. Res. Technol. 2019, 51, 1030–1043. [Google Scholar] [CrossRef]
- Babilon, S.; Lenz, J.; Beck, S.; Myland, P.; Klabes, J.; Klir, S.; Khanh, T.Q. Task-related luminance distributions for office lighting scenarios. Light Eng. 2021, 29, 115–128. [Google Scholar] [CrossRef]
- American National Standards Institute, Inc. American National Standard for Electric Lamps—Specifications for the Chromaticity of Solid-State Lighting Products. ANSI C78.377-2015; American National Standards Institute, Inc: New York, NY, USA, 2015. [Google Scholar]
- Botero-Valencia, J.S.; López-Giraldo, F.E.; Vargas-Bonilla, J.F. Classification of artificial light sources and estimation of Color Rendering Index using RGB sensors, K Nearest Neighbor and Radial Basis Function. Int. J. Smart Sens. Intell. Syst. 2015, 8, 1505–1524. [Google Scholar] [CrossRef]
- Botero-Valencia, J.S.; López-Giraldo, F.E.; Vargas-Bonilla, J.F. Calibration method for Correlated Color Temperature (CCT) measurement using RGB color sensors. In Proceedings of the Symposium of Signals, Images and Artificial Vision—2013: STSIVA, Bogota, Colombia, 11–13 September 2013; pp. 3–8. [Google Scholar] [CrossRef]
- Ashibe, M.; Miki, M.; Hiroyasu, T. Distributed optimization algorithm for lighting color control using chroma sensors. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 174–178. [Google Scholar] [CrossRef]
- Woodstock, T.; Sanderson, A.C. Fusion of color and range sensors for occupant recognition and tracking. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Korea, 16–18 November 2017; pp. 366–371. [Google Scholar] [CrossRef]
- Vora, P.L.; Farrell, J.E.; Tietz, J.D.; Brainard, D.H. Digital Color Cameras-1-Response Models; Hewlett-Packard Laboratories: Palo Alto, CA, USA, 1997. [Google Scholar]
- Luther, R. Aus dem Gebiet der Farbreizmetrik (On color stimulus metrics). Z. Tech. Phys. 1927, 12, 540–558. [Google Scholar]
- Fischer, S.; Myland, P.; Szarafanowicz, M.; Bodrogi, P.; Khanh, T.Q. Strengths and limitations of a uniform 3D-LUT approach for digital camera characterization. In Proceedings of the 24th Color and Imaging Conference (CIC), San Diego, CA, USA, 7–11 November 2016; Society for Imaging Science and Technology: Springfield, VA, USA, 2016; Volume 24, pp. 315–322. [Google Scholar] [CrossRef]
- Smet, K.A.G. Tutorial: The LuxPy Python Toolbox for Lighting and Color Science. LEUKOS 2020, 16, 179–201. [Google Scholar] [CrossRef]
- Illuminating Engineering Society of North America. ANSI/IES-TM-30-18 Method for Evaluating Light Source Colour Rendition. Available online: https://www.ies.org/product/ies-method-for-evaluating-light-source-color-rendition/ (accessed on 22 June 2020).
- Urban, P.; Desch, M.; Happel, K.; Spiehl, D. Recovering Camera Sensitivities Using Target-Based Reflectances Captured under Multiple LED-Illuminations; German Color Group: Ilmenau, Germany, 2010; Volume 2010, pp. 9–16. [Google Scholar]
- Jiang, J.; Liu, D.; Gu, J.; Susstrunk, S. What is the space of spectral sensitivity functions for digital color cameras? In Proceedings of the 2013 IEEE Workshop on Applications of Computer Vision (WACV), Clearwater Beach, FL, USA, 15–17 January 2013; pp. 168–179. [Google Scholar] [CrossRef]
- Walowit, E.; Buhr, H.; Wüller, D. Multidimensional Estimation of Spectral Sensitivities. In Proceedings of the 25th Color and Imaging Conference (CIC), Lillehammer, Norway, 11–15 September 2017; Society for Imaging Science and Technology: Springfield, VA, USA, 2017; Volume 25, pp. 1–6. [Google Scholar]
- Finlayson, G.; Darrodi, M.M.; Mackiewicz, M. Rank-based camera spectral sensitivity estimation. J. Opt. Soc. Am. A 2016, 33, 589–599. [Google Scholar] [CrossRef]
- EMVA. EMVA Standard 1288: Standard for Characterization of Image Sensors and Cameras, Release 3.1; European Machine Vision Association: Barcelona, Spain, 2016. [Google Scholar]
- Vora, P.L.; Farrell, J.E.; Tietz, J.D.; Brainard, D.H. Digital Color Cameras—2—Spectral Response; Hewlett-Packard Laboratories: Palo Alto, CA, USA, 1997. [Google Scholar]
- Hubel, P.M.; Sherman, D.; Farrell, J.E. A comparison of methods of sensor spectral sensitivity estimation. In Proceedings of the 2nd Color and Imaging Conference (CIC), Scottsdale, AZ, USA, 15–18 November 1994; Society for Imaging Science and Technology: Springfield, VA, USA, 1994; Volume 2, pp. 45–48. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Asano, Y.; Fairchild, M.D.; Blondé, L.; Morvan, P. Color matching experiment for highlighting interobserver variability. Color Res. Appl. 2016, 41, 530–539. [Google Scholar] [CrossRef]
- Ramanath, R. Minimizing observer metamerism in display systems. Color Res. Appl. 2009, 34, 391–398. [Google Scholar] [CrossRef]
- Commission Internationale de L’Eclairage. CIE 015:2018 Colorimetry, 4th ed.; CIE: Vienna, Austria, 2018. [Google Scholar]
- Bestech Australia. Understanding Colour Sensors: Working Principle and Applications. 2019. Available online: https://www.bestech.com.au/blogs/understanding-colour-sensors-working-principle-and-applications/ (accessed on 13 April 2021).
- Ramasubramanian, M.K.; Venditti, R.A.; Ammineni, C.; Mallapragada, V. Optical sensor for noncontact measurement of lignin content in high-speed moving paper surfaces. IEEE Sensors J. 2005, 5, 1132–1139. [Google Scholar] [CrossRef]
- Jawahar, M.; Divya, K.C.; Thankaiselvan, V. Sensor based color sorting system for leather shoe components. In Proceedings of the 3rd International Conference on Sensing, Signal Processing and Security (ICSSS), Chennai, India, 4–5 May 2017; pp. 296–300. [Google Scholar] [CrossRef]
- Copîndean, R.; Holonec, R.; Drǎgan, F. The PLC implementation of an automated sorting system using optical sensors. Acta Electroteh. 2018, 58, 312–316. [Google Scholar] [CrossRef]
- Şengül, Ö.; Öztürk, S.; Kuncan, M. Color based object separation in conveyor belt using PLC. Eur. J. Sci. Technol. 2020, 18, 401–412. [Google Scholar] [CrossRef][Green Version]
- Pladellorens, J.; Pintó, A.; Segura, J.; Cadevall, C.; Antó, J.; Pujol, J.; Vilaseca, M.; Coll, J. A device for the color measurement and detection of spots on the skin. Ski. Res. Technol. 2008, 14, 65–70. [Google Scholar] [CrossRef]
- Dimitriadis, N.; Grychtol, B.; Theuring, M.; Behr, T.; Sippel, C.; Deliolanis, N.C. Spectral and temporal multiplexing for multispectral fluorescence and reflectance imaging using two color sensors. Opt. Express 2017, 25, 12812–12829. [Google Scholar] [CrossRef] [PubMed]
- Kap, Ö.; Kiliç, V.; Hardy, J.G.; Horzum, N. Smartphone-based colorimetric detection systems for glucose monitoring in the diagnosis and management of diabetes. Analyst 2021. [Google Scholar] [CrossRef]
- Majumder, S.; Deen, M.J. Smartphone sensors for health monitoring and diagnosis. Sensors 2019, 19, 2164. [Google Scholar] [CrossRef]
- Figueiro, M.G.; Hamner, R.; Bierman, A.; Rea, M.S. Comparisons of three practical field devices used to measure personal light exposures and activity levels. Light. Res. Technol. 2013, 45, 421–434. [Google Scholar] [CrossRef] [PubMed]
- Borisov, S.M.; Wolfbeis, O.S. Optical biosensors. Chem. Rev. 2008, 108, 423–461. [Google Scholar] [CrossRef]
- Zhou, X.; Lee, S.; Xu, Z.; Yoon, J. Recent progress on the development of chemosensors for gases. Chem. Rev. 2015, 115, 7944–8000. [Google Scholar] [CrossRef] [PubMed]
- Schmittmann, O.; Schulze Lammers, P. A true-color sensor and suitable evaluation algorithm for plant recognition. Sensors 2017, 17, 1823. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhu, X. White balance tester with color sensor for industrial applications. In International Conference on Holography and Optical Information Processing (ICHOIP ’96); Mu, G., Jin, G., Sincerbox, G.T., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1996; Volume 2866, pp. 443–445. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, L.; Akbarzadeh, A.; Yang, R. Multi-Projector Display with Continuous Self-Calibration. In Proceedings of the 5th ACM/IEEE International Workshop on Projector Camera Systems—PROCAMS’08, New York, NY, USA, 10 August 2008; Association for Computing Machinery: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Li, X.W. A Color Management Model for Color Sensors of Liquid Crystal Display. Key Eng. Mater. 2010, 428–429, 394–397. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Probe Stimuli | Source | # | Mean | Max | Min |
|---|---|---|---|---|---|
| Warmwhite | own measurement | 1 | 0.0023 | 0.0076 | 0.0002 |
| Coldwhite | own measurement | 1 | 0.0027875 | 0.0096 | 0.0001 |
| TM-30-18 | [38,39] | 318 | 0.002375 | 0.0092 | 0.0001 |
| Illuminant A | CIE A [38,50] | 1 | 0.0024375 | 0.0081 | 0.0001 |
| RGB Mix | CIE RGB1 [38,50] | 1 | 0.0025625 | 0.0093 | 0.0001 |
| Fluorescence | CIE FL12 [38,50] | 1 | 0.0024625 | 0.0115 | 0.0001 |
| R,G,B | own measurements | 3 | 0.0035125 | 0.0128 | 0.0001 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Myland, P.; Babilon, S.; Khanh, T.Q. Tackling Heterogeneous Color Registration: Binning Color Sensors. Sensors 2021, 21, 2950. https://doi.org/10.3390/s21092950
Myland P, Babilon S, Khanh TQ. Tackling Heterogeneous Color Registration: Binning Color Sensors. Sensors. 2021; 21(9):2950. https://doi.org/10.3390/s21092950
Chicago/Turabian StyleMyland, Paul, Sebastian Babilon, and Tran Quoc Khanh. 2021. "Tackling Heterogeneous Color Registration: Binning Color Sensors" Sensors 21, no. 9: 2950. https://doi.org/10.3390/s21092950
APA StyleMyland, P., Babilon, S., & Khanh, T. Q. (2021). Tackling Heterogeneous Color Registration: Binning Color Sensors. Sensors, 21(9), 2950. https://doi.org/10.3390/s21092950