
The Smart-Insole Dataset: Gait Analysis Using Wearable Sensors with a Focus on Elderly and Parkinson’s Patients

 ,
, 

Abstract
1. Introduction
2. The Smart-Insole Dataset
2.1. Data Acquisition Details
- The timestamp (ms)
- The pressure from 1 to 16 sensors (N/cm2)
- The acceleration in the x,y,z axes (g)
- The angular rate in ωx, ωy, ωz (dps)
- The computed center of pressure in the x,y coordinates (−0.5…+0.5 (related to insole length/width))
- The computed by Moticon, total force (N)
2.2. Measurement Protocol Details
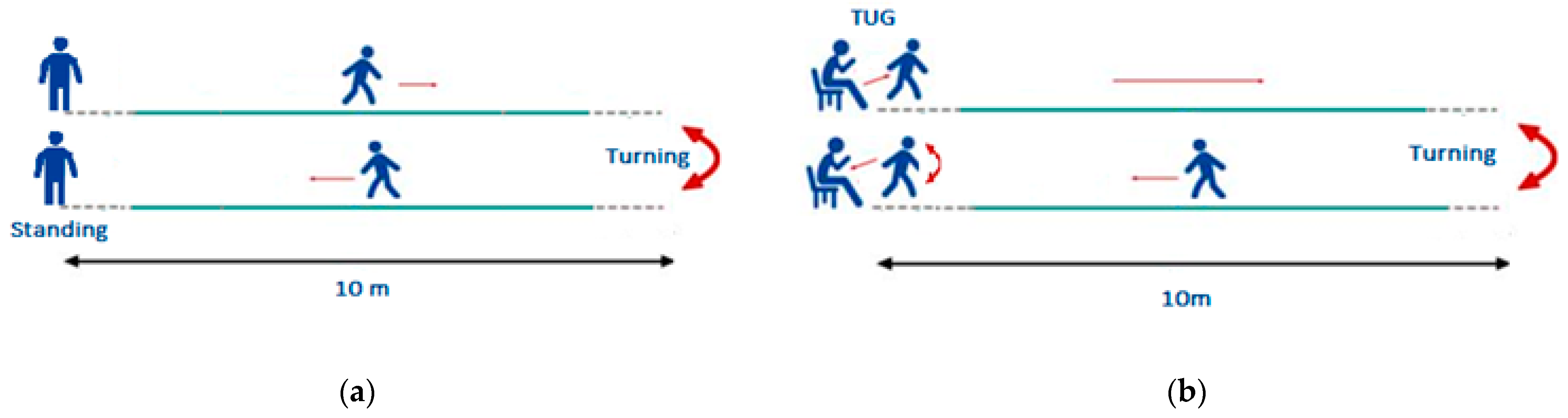
2.2.1. The Walk Straight and Turn Test
2.2.2. The modified Timed Up and Go Test
2.3. Dataset Participants
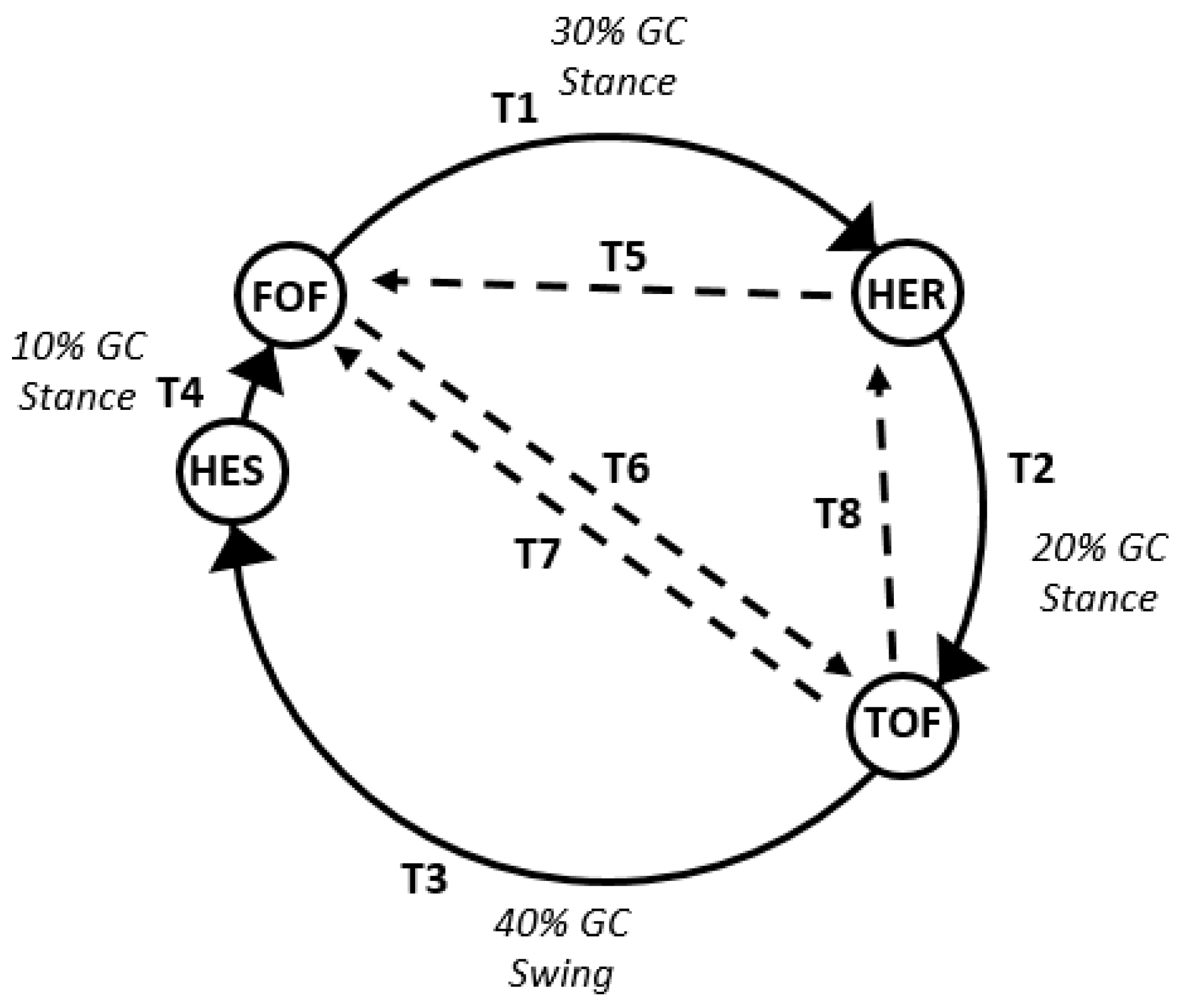
2.4. Smart-Insole Dataset Annotation
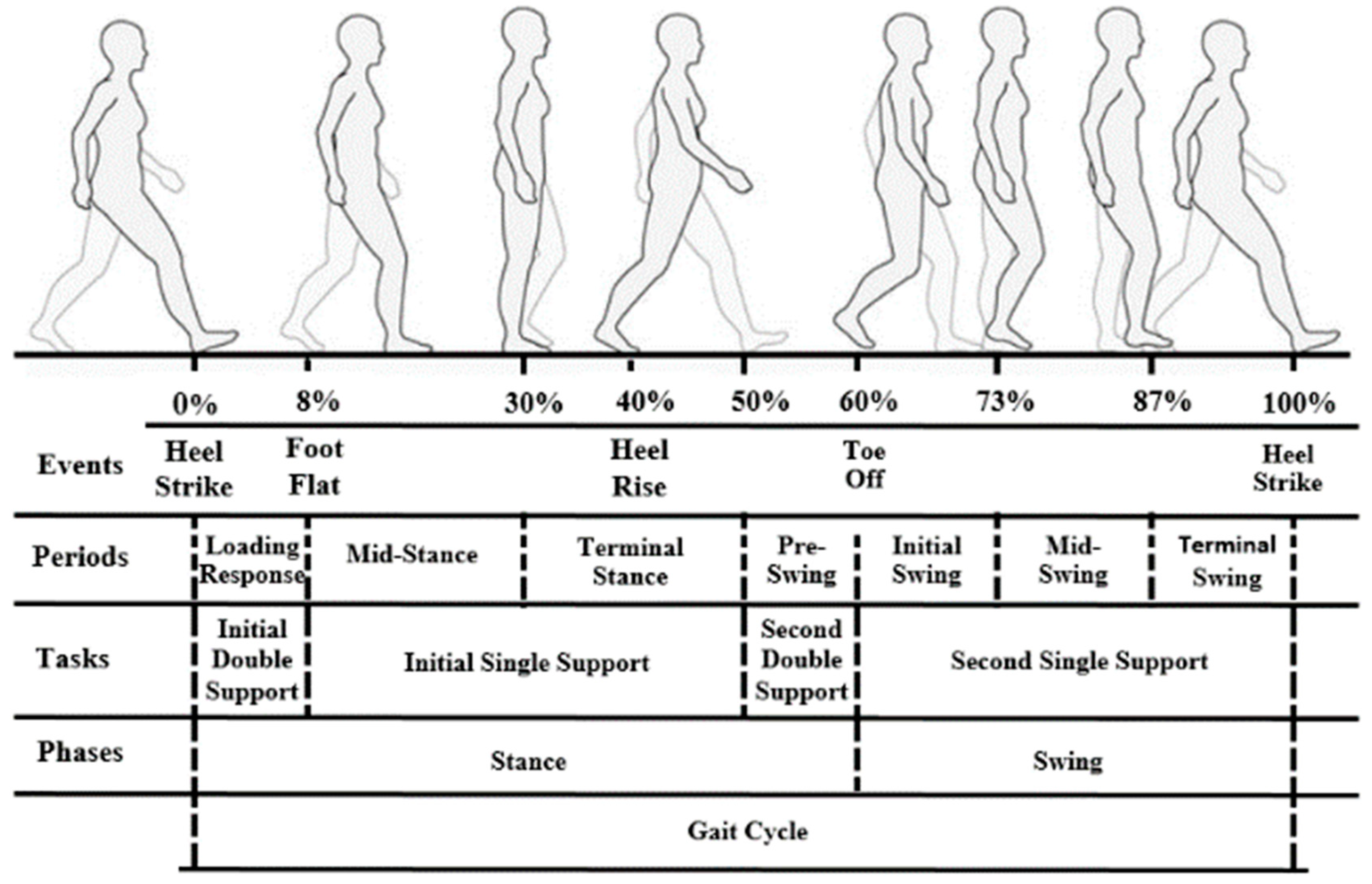
3. Gait Analysis Methodology
- The Step Time (s), which is described as the time between two successive Heel Strikes of different foot.
- The Stride Time (s), which is equal to the time between two successive Heel Strikes of the same foot.
- The Stance Time (s, %), which describes the total time during a gait cycle where the foot is in contact with the ground. Specifically, it is described as the time where the heel of one foot, contacts the ground until the toe of the same foot leaves the ground.
- The Single Support Time (s, %), which describes the time from the Toe Off of the one foot until the Heel Strike of the other foot.
- The Double Support Time (s, %), which describes the time from the Heel Strike of the one foot until the Toe Off of the other foot.
- The Swing Time (s, %), which describes the time from the Toe Off of the one foot until the Heel Strike of the same foot.
- The Gait Velocity (m/s), which describes the displacement in the unit of time, is given by the ratio of the total distance to the total time, or by the ratio of the mean values of stride length to stride time.
- The Step Length (m) is calculated by dividing the total distance covered (20 m) to the total number of steps (Steps Number) which is specified as the number of Heel Strikes during gait.
- The Stride Length (m) is calculated by dividing the total distance covered (20 m) to the total number of strides (Strides Number).
- The Step Frequency (steps/min) also called cadence or walking rate, describes the number of steps in the unit of time. It is given by the ratio of the steps number to the time of gait, multiplied by 60 to be expressed in minutes.
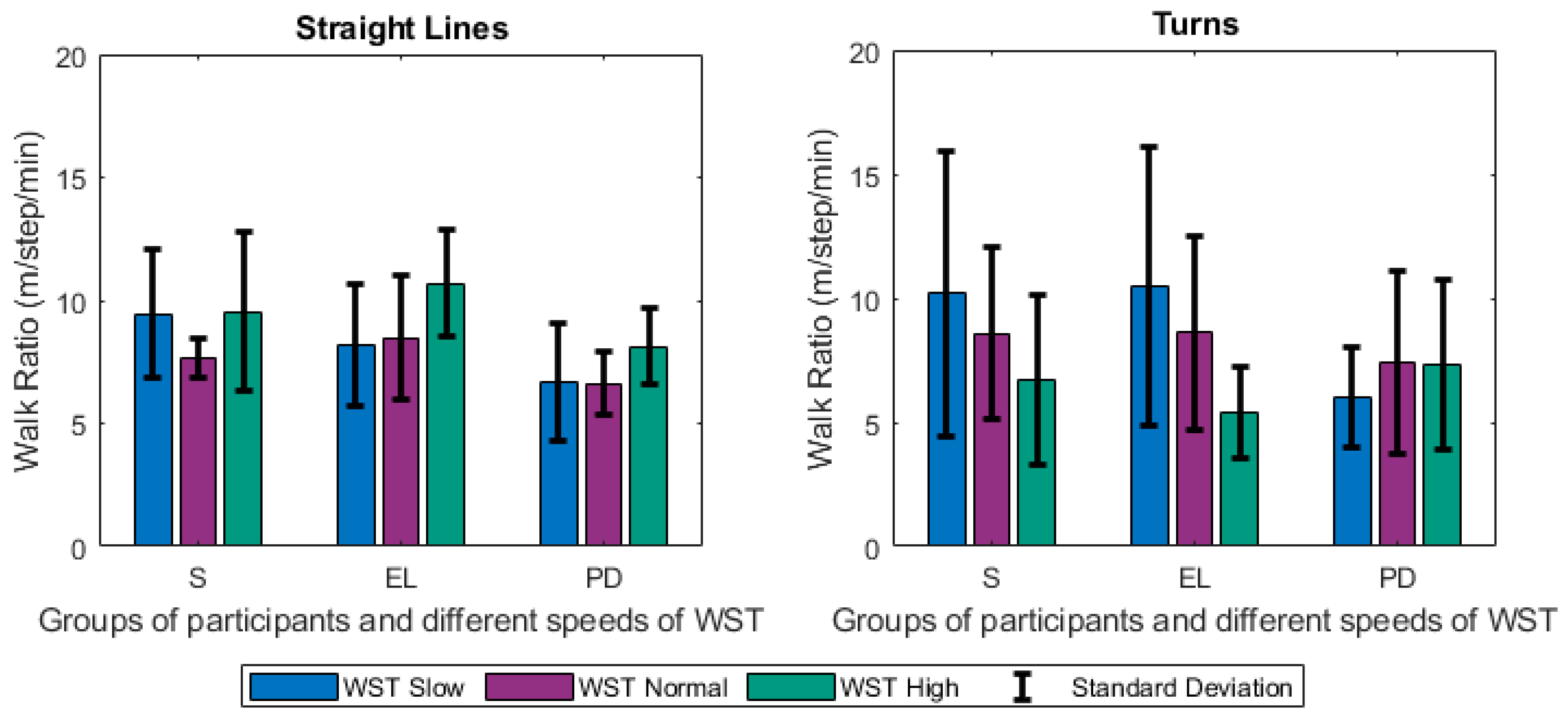
- The Walk Ratio (mm/step/min) represents the relationship between the width (base of gait) and the frequency of steps and is given by the ratio of step length to Step Frequency.
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Horst, F.; Mildner, M.; Schöllhorn, W.I. One-year persistence of individual gait patterns identified in a follow-up study—A call for individualised diagnose and therapy. Gait Posture 2017, 58, 476–480. [Google Scholar] [CrossRef]
- Alkhatib, R.; Diab, M.; Moslem, B.; Corbier, C.; Badaoui, M. El Gait-Ground Reaction Force Sensors Selection Based on ROC Curve Evaluation. J. Comput. Commun. 2015, 3, 13–19. [Google Scholar] [CrossRef]
- Whittle, M.W. Gait Analysis—An Intoduction, 4th ed.; Butterworth-Heinemann Ltd.: Oxford, UK, 2007. [Google Scholar]
- Müller, B.; Wolf, S.I. Handbook of Human Motion; Springer International Publishing: Cham, Switzerland, 2018; ISBN 9783319144177. [Google Scholar]
- Wall, J.C.; Charteris, J.; Turnbull, G.I. Two steps equals one stride equals what? The applicability of normal gait nomenclature to abnormal walking patterns. Clin. Biomech. 1987, 2, 119–125. [Google Scholar] [CrossRef]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait partitioning methods: A systematic review. Sensors 2016, 16, 66. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Lu, K.; Yan, S.; Sun, M.; Lester, D.K.; Zhang, K. Gait phase varies over velocities. Gait Posture 2014, 39, 756–760. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lach, J.; Member, S.; Lo, B.; Member, S. Toward pervasive gait analysis with wearable sensors: A systematic review. IEEE J. Biomed. Health Inform. 2016, 20, 1521–1537. [Google Scholar] [CrossRef] [PubMed]
- Díaz, S.; Stephenson, J.B.; Labrador, M.A. Use of wearable sensor technology in gait, balance, and range of motion analysis. Appl. Sci. 2020, 10, 234. [Google Scholar] [CrossRef]
- Saboor, A.; Kask, T.; Kuusik, A.; Alam, M.M.; Le Moullec, Y.; Niazi, I.K.; Zoha, A.; Ahmad, R. Latest Research Trends in Gait Analysis Using Wearable Sensors and Machine Learning: A Systematic Review. IEEE Access 2020, 8, 167830–167864. [Google Scholar] [CrossRef]
- Vu, H.T.T.; Gomez, F.; Cherelle, P.; Lefeber, D.; Nowé, A.; Vanderborght, B. ED-FNN: A new deep learning algorithm to detect percentage of the gait cycle for powered prostheses. Sensors 2018, 18, 2389. [Google Scholar] [CrossRef]
- Neumann, D. Kinesiology of the Musculoskeletal System, 2nd ed.; Mosby: Maryland Heights, MI, USA, 2009; ISBN 978-0323039895. [Google Scholar]
- Webster, J.B.; Darter, B.J. 4-Principles of Normal and Pathologic Gait. In Atlas of Orthoses and Assistive Devices, 5th ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2019; pp. 49–62. ISBN 9780323483230. [Google Scholar]
- Moticon-SCIENCE. Available online: https://www.moticon.de/ (accessed on 14 December 2020).
- Braun, B.J.; Veith, N.T.; Hell, R.; Döbele, S.; Roland, M.; Rollmann, M.; Holstein, J.; Pohlemann, T. Validation and reliability testing of a new, fully integrated gait analysis insole. J. Foot Ankle Res. 2015, 8, 54. [Google Scholar] [CrossRef]
- Stöggl, T.; Martiner, A. Validation of Moticon’s OpenGo sensor insoles during gait, jumps, balance and cross-country skiing specific imitation movements. J. Sports Sci. 2017, 35, 196–206. [Google Scholar] [CrossRef]
- Kakarla, T.P.; Varma, K.A.; Preejith, S.P.; Joseph, J.; Sivaprakasam, M. Accuracy Enhancement of Total Force by Capacitive Insoles. In Medical Measurements and Applications, MeMeA 2019—Symposium Proceedings; Institute of Electrical and Electronics Engineers Inc.: Istanbul, Turkey, 2019. [Google Scholar]
- Podsiadlo, D.; Richardson, S. The timed “Up & Go”: A test of basic functional mobility for frail elderly persons. J. Am. Geriatr. Soc. 1991, 39, 142–148. [Google Scholar] [PubMed]
- Herman, T.; Giladi, N.; Hausdorff, J.M. Properties of the “Timed Up and Go” test: More than meets the eye. Gerontology 2011, 57, 203–210. [Google Scholar] [CrossRef]
- McGrath, D.; Greene, B.R.; Doheny, E.P.; McKeown, D.J.; De Vito, G.; Caulfield, B. Reliability of quantitative TUG measures of mobility for use in falls risk assessment. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 466–469. [Google Scholar]
- Mariani, B.; Jiménez, M.C.; Vingerhoets, F.J.G.; Aminian, K. On-shoe wearable sensors for gait and turning assessment of patients with parkinson’s disease. IEEE Trans. Biomed. Eng. 2013, 60, 155–158. [Google Scholar] [CrossRef] [PubMed]
- Nieuwboer, A.; De Weerdt, W.; Dom, R.; Peeraer, L.; Lesaffre, E.; Hilde, F.; Baunach, B. Plantar force distribution in Parkinsonian gait: A comparison between patients and age-matched control subjects. Scand. J. Rehabil. Med. 1999, 31, 185–192. [Google Scholar] [CrossRef]
- Snijders, A.H.; Weerdesteyn, V.; Hagen, Y.J.; Duysens, J.; Giladi, N.; Bloem, B.R. Obstacle avoidance to elicit freezing of gait during treadmill walking. Mov. Disord. 2010, 25, 57–63. [Google Scholar] [CrossRef]
- Moore, S.T.; Yungher, D.A.; Morris, T.R.; Dilda, V.; Macdougall, H.G.; Shine, J.M.; Naismith, S.L.; Lewis, S.J. Autonomous identification of freezing of gait in Parkinson’s disease from lower-body segmental accelerometry. J. Neuroeng. Rehabil. 2013, 10, 1. [Google Scholar] [CrossRef]
- Moon, Y.; Wajda, D.A.; Motl, R.W.; Sosnoff, J.J. Stride-Time Variability and Fall Risk in Persons with Multiple Sclerosis. Mult. Scler. Int. 2015, 2015, 1–7. [Google Scholar] [CrossRef]
- Fino, P.C.; Parrington, L.; Pitt, W.; Martini, D.N.; Chesnutt, J.C.; Chou, L.S.; King, L.A. Detecting gait abnormalities after concussion or mild traumatic brain injury: A systematic review of single-task, dual-task, and complex gait. Gait Posture 2018, 62, 157–166. [Google Scholar] [CrossRef]
- Jacobs, J.V.; Horak, F.B.; Tran, V.K.; Nutt, J.G. Multiple balance tests improve the assessment of postural stability in subjects with Parkinson’s disease. J. Neurol. Neurosurg. Psychiatry 2006, 77, 322–326. [Google Scholar] [CrossRef]
- Brauer, S.G.; Woollacott, M.H.; Lamont, R.; Clewett, S.; O’Sullivan, J.; Silburn, P.; Mellick, G.D.; Morris, M.E. Single and dual task gait training in people with Parkinson’s Disease: A protocol for a randomised controlled trial. BMC Neurol. 2011, 11, 90. [Google Scholar] [CrossRef]
- Goetz, C.G.; Tilley, B.C.; Shaftman, S.R.; Stebbins, G.T.; Fahn, S.; Martinez-Martin, P.; Poewe, W.; Sampaio, C.; Stern, M.B.; Dodel, R.; et al. Movement Disorder Society-Sponsored Revision of the Unified Parkinson’s Disease Rating Scale (MDS-UPDRS): Scale presentation and clinimetric testing results. Mov. Disord. 2008, 23, 2129–2170. [Google Scholar] [CrossRef] [PubMed]
- Kluge, F.; Gaßner, H.; Hannink, J.; Pasluosta, C.; Klucken, J.; Eskofier, B.M. Towards mobile gait analysis: Concurrent validity and test-retest reliability of an inertial measurement system for the assessment of spatio-temporal gait parameters. Sensors 2017, 17, 1522. [Google Scholar] [CrossRef]
- Combs, S.A.; Diehl, M.D.; Filip, J.; Long, E. Short-distance walking speed tests in people with Parkinson disease: Reliability, responsiveness, and validity. Gait Posture 2014, 39, 784–788. [Google Scholar] [CrossRef]
- Goetz, C.G.; Fahn, S.; Martinez-Martin, P. The MDS-sponsored Revision of the Unified Parkinson’s Disease Rating Scale. J. Mov. Disord. 2008, 1, 1–33. [Google Scholar]
- Dorsey, E.R.; Darwin, K.C.; Mohammed, S.; Donohue, S.; Tethal, A.; Achey, M.A.; Ward, S.; Caughey, E.; Conley, E.D.; Eriksson, N.; et al. Virtual research visits and direct-to-consumer genetic testing in Parkinson’s disease. Digit. Health 2015, 1. [Google Scholar] [CrossRef]
- Dorsey, E.R.; Wagner, J.D.; Bull, M.T.; Rizzieri, A.; Grischkan, J.; Achey, M.A.; Sherer, T.; Chowdhury, S.; Meunier, C.; Cappelletti, L.; et al. Feasibility of virtual research visits in fox trial finder. J. Parkinson’s Dis. 2015, 5, 505–515. [Google Scholar] [CrossRef]
- Schneider, R.B.; Omberg, L.; Macklin, E.A.; Daeschler, M.; Bataille, L.; Anthwal, S.; Myers, T.L.; Baloga, E.; Duquette, S.; Snyder, P.; et al. Design of a virtual longitudinal observational study in Parkinson’s disease (AT-HOME PD). Ann. Clin. Transl. Neurol. 2020, 8, 308–320. [Google Scholar] [CrossRef]
- Stillerova, T.; Liddle, J.; Gustafsson, L.; Lamont, R.; Silburn, P. Remotely assessing symptoms of Parkinson’s disease using videoconferencing: A feasibility study. Neurol. Res. Int. 2016, 2016, 4802570. [Google Scholar] [CrossRef] [PubMed]
- Tarolli, C.; Andrzejewski, K.; Bull, M.; Goldenthal, S.; O’Brien, M.; Simuni, T.; Zimmerman, G.; Biglan, K.; Dorsey, E.R. Virtual research visits in individuals with Parkinson disease enrolled in a clinical trial: REACT-PD Study Interim Analysis (P4.005). Neurology 2017, 88. Available online: http://n.neurology.org/content/88/16_Supplement/P4.005.abstract (accessed on 10 February 2021).
- Chatzaki, C.; Pediaditis, M.; Vavoulas, G.; Tsiknakis, M. Human Daily Activity and Fall Recognition Using a Smartphone’s Acceleration Sensor. In Information and Communication Technologies for Ageing Well and e-Health; Röcker, C., O’Donoghue, J., Ziefle, M., Helfert, M., Molloy, W., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 100–118. [Google Scholar]
- Pappas, I.P.I.; Popovic, M.R.; Keller, T.; Dietz, V.; Morari, M. A reliable gait phase detection system. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 113–125. [Google Scholar] [CrossRef]
- Tekscan Research Software User Manual; Tekscan Inc.: Boston, MA, USA, 2004.
- Catalfamo, P.; Moser, D.; Ghoussayni, S.; Ewins, D. Detection of gait events using an F-Scan in-shoe pressure measurement system. Gait Posture 2008, 28, 420–426. [Google Scholar] [CrossRef]
- Pappas, I.P.I.; Keller, T.; Mangold, S. A reliable, gyroscope based gait phase detection sensor embedded in a shoe insole. Proc. IEEE Sens. 2002, 2, 1085–1088. [Google Scholar]
- Alvarez, C.; De Vera, M.; Beauchamp, R.; Ward, V.; Black, A. Classification of idiopathic toe walking based on gait analysis: Development and application of the ITW severity classification. Gait Posture 2007, 26, 428–435. [Google Scholar] [CrossRef]
- Hase, K.; Stein, R.B. Turning strategies during human walking. J. Neurophysiol. 1999, 81, 2914–2922. [Google Scholar] [CrossRef]
- Wu, A.R.; Simpson, C.S.; van Asseldonk, E.H.F.; van der Kooij, H.; Ijspeert, A.J. Mechanics of very slow human walking. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Murakami, R.; Otaka, Y. Estimated lower speed boundary at which the walk ratio constancy is broken in healthy adults. J. Phys. Ther. Sci. 2017, 29, 722–725. [Google Scholar] [CrossRef] [PubMed]
- Goldberger, A.L.; Amaral, L.A.N.; Glass, L.; Hausdorff, J.M.; Ivanov, P.C.; Mark, R.G.; Mietus, J.E.; Moody, G.B.; Peng, C.; Stanley, H.E. PhysioBank, PhysioToolkit, and PhysioNet: Components of a new research resource for complex physiologic signals. Circulation 2000, 101, e215–e220. [Google Scholar] [CrossRef]
- Shimmer. Available online: http://www.shimmersensing.com/ (accessed on 8 February 2021).
- Chereshnev, R.; Kertész-Farkas, A. HuGaDB: Human gait database for activity recognition from wearable inertial sensor networks. In Analysis of Images, Social Networks and Texts; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2017; Volume 10716, pp. 131–141. [Google Scholar]
- Zheng, S.; Huang, K.; Tan, T.; Tao, D. A cascade fusion scheme for gait and cumulative foot pressure image recognition. Pattern Recognit. 2012, 45, 3603–3610. [Google Scholar] [CrossRef]
- Kobayashi, M.M.Y.; Hida, N.; Nakajima, K.; Fujimoto, M. 2019: AIST Gait Database 2019. Available online: https://unit.aist.go.jp/harc/ExPART/GDB2019.html (accessed on 5 December 2020).
- Chui, K.K.; Lusardi, M.M. Spatial and temporal parameters of self-selected and fast walking speeds in healthy community-living adults aged 72–98 years. J. Geriatr. Phys. Ther. 2010, 33, 173–178. [Google Scholar] [CrossRef]
- Jerome, G.J.; Ko, S.; Kauffman, D.; Studenski, S.A.; Ferrucci, L.; Simonsick, E.M. Gait Characteristics Associated with Walking Speed Decline in Older Adults: Results from the Baltimore Longitudinal Study of Aging; Elsevier Ireland Limited: Shannon, Ireland, 2015; Volume 60. [Google Scholar]
- Wahid, F.; Begg, R.K.; Hass, C.J.; Halgamuge, S.; Ackland, D.C. Classification of Parkinson’s disease gait using spatial-temporal gait features. IEEE J. Biomed. Health Inform. 2015, 19, 1794–1802. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | No. of Recordings | Average Age (Years) | Age Span (Years) | Height (cm) | Weight (Kg) | Gender |
|---|---|---|---|---|---|---|
| Healthy adults (S) | 13 | 38 | 20–58 | 176 | 81 | 2 Females, 11 Males |
| Elderly (EL) | 9 | 74 | 60–85 | 173 | 80 | All Males |
| PD patients (PD) | 8 | 72 | 63–83 | 172 | 80 | All Males |
| Participant * | “MDS-UPDRS-3.9” Arising from Chair | “MDS-UPDRS-3.10” Gait | “MDS-UPDRS-3.11” Freezing of Gait | “MDS-UPDRS-3.14” Global Spontaneity of Movement |
|---|---|---|---|---|
| PD001 | 2 | 3 | 1 | 2 |
| PD002 | 0 | 1 | 0 | 1 |
| PD003 | 4 | 4 | 4 | 4 |
| PD004 | 1 | 1 | 0 | 1 |
| PD005 | 3 | 2 | 1 | 3 |
| PD006 | 0 | 1 | 0 | 1 |
| PD007 | 1 | 2 | 0 | 2 |
| PD008 | 4 | 3 | 0 | 3 |
| EL001 | 0 | 0 | 0 | 0 |
| EL002 | 1 | 1 | 0 | 1 |
| EL003 | 1 | 0 | 0 | 0 |
| EL004 | 1 | 0 | 0 | 0 |
| EL006 | 0 | 0 | 0 | 0 |
| EL007 | 1 | 1 | 0 | 1 |
| EL008 | 0 | 0 | 0 | 0 |
| EL009 | 0 | 0 | 0 | 0 |
| EL010 | 0 | 0 | 0 | 0 |
| S001 | 0 | 0 | 0 | 0 |
| S002 | 0 | 0 | 0 | 0 |
| S003 | 0 | 0 | 0 | 0 |
| S004 | 0 | 0 | 0 | 0 |
| S005 | 0 | 1 | 0 | 0 |
| S006 | 0 | 0 | 0 | 0 |
| S007 | 0 | 0 | 0 | 0 |
| S008 | 0 | 0 | 0 | 0 |
| S009 | 0 | 0 | 0 | 0 |
| S010 | 0 | 0 | 0 | 0 |
| S011 | 0 | 0 | 0 | 0 |
| S012 | 0 | 1 | 0 | 0 |
| S013 | 0 | 0 | 0 | 0 |
| Label | Activity | Description |
|---|---|---|
| STD | Standing | Standing with subtle movements |
| STE | Standing Eyes closed | Standing with eyes closed |
| WAL | Walking | Normal walking |
| WAS | Walking Slow | Walking in a slow rhythm |
| WAF | Walking Fast | Walking in a fast rhythm |
| SCH | Sit on chair | Sitting on a chair |
| CHU | Chair up | Getting up from a chair |
| SIT | Sitting | Sitting with subtle movements |
| TUR | Turning | Turning 180 degrees at a normal speed at the end of the 10 m aisle. |
| TUS | Turning Slow | Turning 180 degrees at a slow speed at the end of the 10 m aisle. |
| TUF | Turning Fast | Turning 180 degrees at a fast speed at the end of the 10 m aisle. |
| Label | Activity | Description |
|---|---|---|
| HES | Heel Strike | Heel contacts the floor |
| HER | Heel Rise | Heel rises of the floor |
| TOF | Toe Off | Toe leaves the floor |
| FOF | Foot Flat | Foot is flat on the floor; both heel and toe contact the floor. |
| Label | Condition Check |
|---|---|
| HES | |
| FOF | |
| HER | |
| TOF | |
| FOF (from HER) | |
| TOF (from FOF) | |
| FOF (from TOF) | |
| HER (from TOF) |
| Type of Test | WST Slow | WST Normal | WST High | TUG | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Group of Participants | S | EL | PD | S | EL | PD | S | EL | PD | S | EL | PD |
| Number of Recordings | 52 | 36 | 14 | 52 | 36 | 14 | 52 | 34 | 14 | 52 | 36 | 22 |
| Left Step Duration (s) | 0.75 ± 0.13 | 0.76 ± 0.17 | 0.70 ± 0.10 | 0.55 ± 0.05 | 0.58 ± 0.07 | 0.62 ± 0.15 | 0.48 ± 0.10 | 0.51 ± 0.12 | 0.51 ± 0.11 | 0.55 ± 0.15 | 0.44 ± 0.14 | 0.54 ± 0.09 |
| Right Step Duration (s) | 0.75 ± 0.14 | 0.77 ± 0.15 | 0.73 ± 0.14 | 0.57 ± 0.06 | 0.58 ± 0.08 | 0.58 ± 0.06 | 0.54 ± 0.09 | 0.49 ± 0.12 | 0.53 ± 0.07 | 0.57 ± 0.10 | 0.62 ± 0.14 | 0.63 ± 0.18 |
| Step Duration (s) | 0.75 ± 0.13 | 0.76 ± 0.14 | 0.72 ± 0.09 | 0.56 ± 0.04 | 0.58 ± 0.05 | 0.60 ± 0.09 | 0.51 ± 0.06 | 0.50 ± 0.05 | 0.52 ± 0.06 | 0.57 ± 0.08 | 0.54 ± 0.03 | 0.58 ± 0.10 |
| Stride Duration (s) | 1.50 ± 0.26 | 1.54 ± 0.28 | 1.44 ± 0.20 | 1.13 ± 0.08 | 1.18 ± 0.10 | 1.20 ± 0.20 | 1.02 ± 0.13 | 1.00 ± 0.09 | 1.04 ± 0.12 | 1.12 ± 0.16 | 1.07 ± 0.08 | 1.18 ± 0.23 |
| Steps Number | 15.70 ± 2.38 | 22.47 ± 5.60 | 22.28 ± 5.30 | 14.45 ± 1.15 | 20.11 ± 5.80 | 19.57 ± 4.07 | 12.75 ± 1.48 | 14.91 ± 1.86 | 17.07 ± 3.60 | 12.78 ± 1.99 | 17.61 ± 3.90 | 17.30 ± 5.00 |
| Single Support Time (s) | 1.26 ± 0.11 | 1.27 ± 0.24 | 1.16 ± 0.24 | 0.91 ± 0.10 | 0.87 ± 0.08 | 0.98 ± 0.24 | 0.84 ± 0.12 | 0.83 ± 0.08 | 0.77 ± 0.12 | 0.89 ± 0.13 | 0.83 ± 0.05 | 0.91 ± 0.23 |
| Double Support Time (s) | 0.27 ± 0.13 | 0.36 ± 0.16 | 0.39 ± 0.16 | 0.22 ± 0.08 | 0.30 ± 0.10 | 0.29 ± 0.09 | 0.18 ± 0.07 | 0.17 ± 0.11 | 0.27 ± 0.09 | 0.22 ± 0.09 | 0.24 ± 0.09 | 0.25 ± 0.09 |
| Stance Time (s) | 0.86 ± 0.17 | 0.93 ± 0.19 | 0.89 ± 0.16 | 0.67 ± 0.06 | 0.72 ± 0.09 | 0.72 ± 0.15 | 0.59 ± 0.11 | 0.56 ± 0.08 | 0.65 ± 0.09 | 0.63 ± 0.08 | 0.63 ± 0.01 | 0.77 ± 0.43 |
| Swing Time (s) | 0.61 ± 0.10 | 0.57 ± 0.08 | 0.50 ± 0.04 | 0.45 ± 0.04 | 0.42 ± 0.03 | 0.45 ± 0.04 | 0.45 ± 0.04 | 0.45 ± 0.02 | 0.41 ± 0.07 | 0.43 ± 0.04 | 0.40 ± 0.05 | 0.40 ± 0.04 |
| Single Support (%) | 86.49 ± 10.26 | 83.45 ± 8.77 | 81.94 ± 11.88 | 80.64 ± 7.15 | 76.62 ± 8.57 | 82.72 ± 8.78 | 81.54 ± 8.02 | 82.74 ± 11.05 | 73.27 ± 8.17 | 82.99 ± 9.07 | 79.91 ± 8.10 | 78.82 ± 8.17 |
| Double Support (%) | 16.76 ± 7.86 | 21.91 ± 7.57 | 20.92 ± 10.34 | 19.82 ± 6.45 | 25.90 ± 7.39 | 24.06 ± 4.10 | 17.94 ± 5.40 | 16.04 ± 9.12 | 25.97 ± 9.00 | 20.15 ± 7.45 | 23.25 ± 6.88 | 21.99 ± 7.72 |
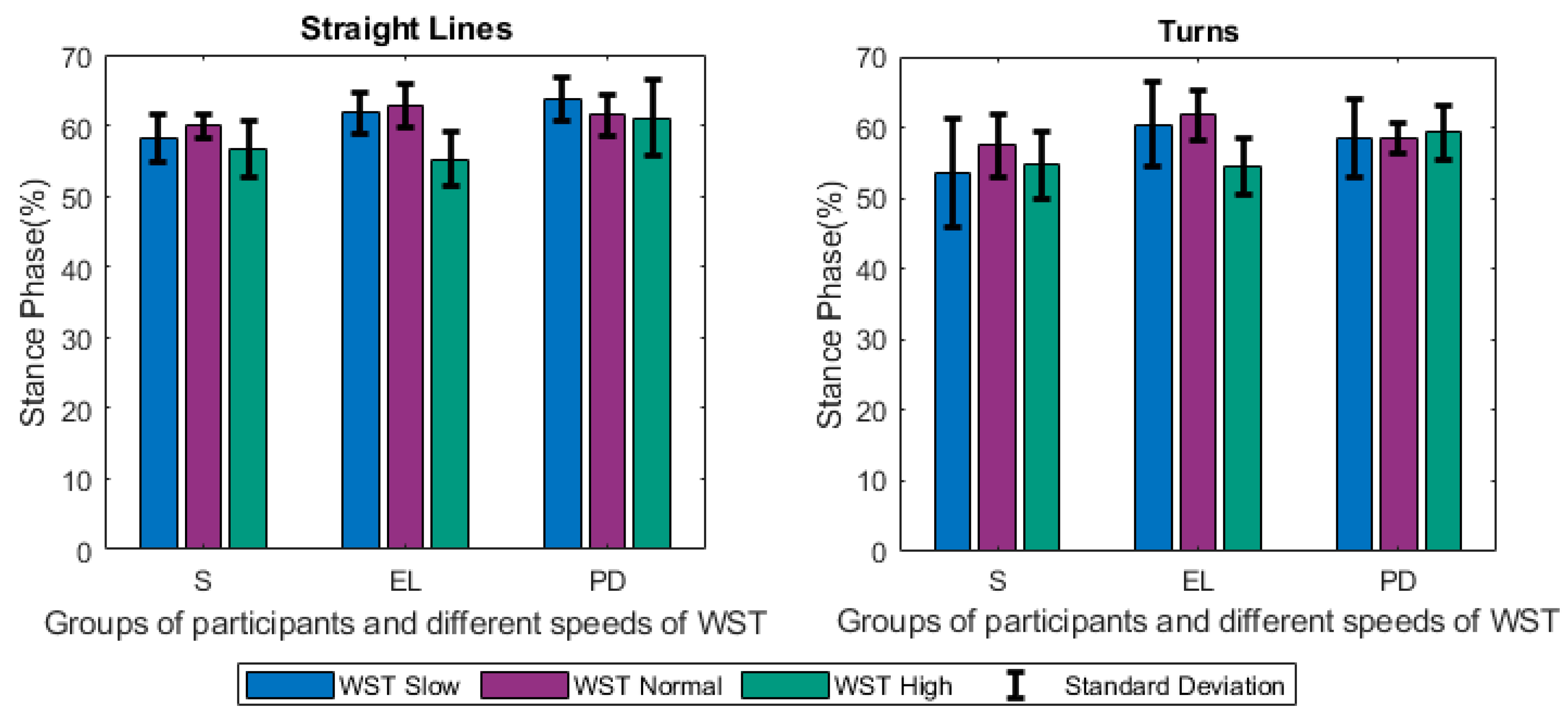
| Stance Phase (%) | 58.26 ± 3.37 | 61.74 ± 2.81 | 63.69 ± 3.04 | 59.88 ± 1.79 | 62.86 ± 3.10 | 61.48 ± 2.95 | 56.57 ± 4.01 | 55.21 ± 3.85 | 61.09 ± 5.25 | 59.21 ± 2.78 | 61.21 ± 2.79 | 63.84 ± 6.01 |
| Swing Phase (%) | 41.74 ± 3.37 | 38.26 ± 2.81 | 36.31 ± 3.04 | 40.12 ± 1.79 | 37.14 ± 3.10 | 38.52 ± 2.95 | 43.45 ± 4.01 | 44.79 ± 3.85 | 38.91 ± 5.25 | 40.79 ± 2.78 | 38.79 ± 2.79 | 36.16 ± 6.01 |
| Gait Velocity (m/s) | 0.99 ± 0.20 | 0.77 ± 0.26 | 0.71 ± 0.20 | 1.39 ± 0.17 | 1.21 ± 0.34 | 1.00 ± 0.29 | 1.79 ± 0.28 | 1.72 ± 0.35 | 1.31 ± 0.35 | 1.67 ± 0.37 | 1.47 ± 0.36 | 1.25 ± 0.45 |
| Step Length (m) | 0.70 ± 0.11 | 0.56 ± 0.14 | 0.50 ± 0.12 | 0.75 ± 0.06 | 0.68 ± 0.16 | 0.56 ± 0.11 | 0.87 ± 0.14 | 0.82 ± 0.12 | 0.65 ± 0.12 | 0.88 ± 0.18 | 0.75 ± 0.16 | 0.70 ± 0.35 |
| Stride Length (m) | 1.44 ± 0.25 | 1.14 ± 0.29 | 1.00 ± 0.26 | 1.56 ± 0.15 | 1.40 ± 0.34 | 1.16 ± 0.23 | 1.82 ± 0.36 | 1.70 ± 0.27 | 1.33 ± 0.27 | 1.86 ± 0.43 | 1.57 ± 0.37 | 1.52 ± 0.92 |
| Step Frequency (steps/min) | 76.67 ± 12.43 | 63.21 ± 9.11 | 67.59 ± 8.14 | 98.18 ± 7.17 | 72.47 ± 6.24 | 74.19 ± 8.09 | 80.00 ± 8.76 | 79.68 ± 7.23 | 83.21 ± 4.01 | 100.67 ± 12.24 | 71.45 ± 8.14 | 65.18 ± 19.87 |
| Walk Ratio (mm/step/min) | 9.46 ± 2.65 | 8.16 ± 2.48 | 6.69 ± 2.41 | 7.68 ± 0.78 | 8.49 ± 2.56 | 6.63 ± 1.27 | 9.55 ± 3.21 | 10.68 ± 2.17 | 8.12 ± 1.53 | 9.07 ± 3.37 | 13.14 ± 3.46 | 26.02 ± 53.65 |
| Type of Test | WST Slow | WST Normal | WST High | TUG | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Group of Participants | S | EL | PD | S | EL | PD | S | EL | PD | S | EL | PD |
| Number of Recordings | 26 | 18 | 7 | 26 | 18 | 7 | 26 | 17 | 7 | 26 | 18 | 11 |
| Left Step Duration (s) | 0.77 ± 0.23 | 0.80 ± 0.25 | 0.77 ± 0.28 | 0.59 ± 0.16 | 0.60 ± 0.09 | 0.62 ± 0.12 | 0.52 ± 0.16 | 0.56 ± 0.17 | 0.58 ± 0.13 | 0.61 ± 0.17 | 0.45 ± 0.25 | 0.65 ± 0.24 |
| Right Step Duration (s) | 0.79 ± 0.30 | 0.88 ± 0.38 | 0.70 ± 0.48 | 0.59 ± 0.21 | 0.63 ± 0.16 | 0.50 ± 0.18 | 0.58 ± 0.13 | 0.50 ± 0.17 | 0.49 ± 0.20 | 0.58 ± 0.11 | 0.63 ± 0.17 | 0.81 ± 0.79 |
| Step Duration (s) | 0.78 ± 0.19 | 0.85 ± 0.22 | 0.69 ± 0.22 | 0.60 ± 0.11 | 0.61 ± 0.01 | 0.63 ± 0.15 | 0.55 ± 0.11 | 0.52 ± 0.08 | 0.60 ± 0.16 | 0.59 ± 0.09 | 0.56 ± 0.08 | 0.72 ± 0.48 |
| Stride Duration (s) | 1.56 ± 0.41 | 1.69 ± 0.44 | 1.49 ± 0.52 | 1.19 ± 0.27 | 1.24 ± 0.19 | 1.13 ± 0.14 | 1.11 ± 0.22 | 1.06 ± 0.20 | 1.08 ± 0.21 | 1.19 ± 0.19 | 1.09 ± 0.19 | 1.46 ± 0.97 |
| Steps Number | 3.75 ± 0.79 | 4.10 ± 1.12 | 4.70 ± 0.48 | 3.68 ± 0.62 | 3.77 ± 0.80 | 4.42 ± 1.13 | 4.07 ± 0.79 | 4.35 ± 0.60 | 4.16 ± 0.75 | 3.80 ± 0.78 | 4.11 ± 0.83 | 4.25 ± 0.75 |
| Single Support Time (s) | 0.97 ± 0.22 | 1.17 ± 0.27 | 1.01 ± 0.17 | 0.88 ± 0.14 | 0.88 ± 0.20 | 0.92 ± 0.23 | 0.79 ± 0.14 | 0.86 ± 0.12 | 0.81 ± 0.19 | 0.89 ± 0.10 | 0.76 ± 0.17 | 0.98 ± 0.49 |
| Double Support Time (s) | 0.30 ± 0.24 | 0.46 ± 0.26 | 0.36 ± 0.28 | 0.33 ± 0.14 | 0.35 ± 0.13 | 0.32 ± 0.11 | 0.24 ± 0.14 | 0.23 ± 0.13 | 0.33 ± 0.18 | 0.26 ± 0.11 | 0.37 ± 0.15 | 0.34 ± 0.23 |
| Stance Time (s) | 0.73 ± 0.25 | 0.91 ± 0.31 | 0.73 ± 0.23 | 0.62 ± 0.12 | 0.69 ± 0.11 | 0.63 ± 0.10 | 0.55 ± 0.11 | 0.55 ± 0.09 | 0.63 ± 0.09 | 0.60 ± 0.10 | 0.64 ± 0.10 | 0.82 ± 0.61 |
| Swing Time (s) | 0.61 ± 0.11 | 0.57 ± 0.08 | 0.50 ± 0.04 | 0.45 ± 0.04 | 0.42 ± 0.03 | 0.45 ± 0.04 | 0.45 ± 0.04 | 0.45 ± 0.02 | 0.43 ± 0.04 | 0.44 ± 0.05 | 0.40 ± 0.05 | 0.43 ± 0.13 |
| Single Support (%) | 73.54 ± 14.96 | 74.66 ± 12.17 | 81.75 ± 13.24 | 79.89 ± 12.67 | 72.70 ± 12.13 | 76.16 ± 12.52 | 79.29 ± 12.23 | 80.46 ± 8.04 | 71.16 ± 13.90 | 80.35 ± 8.07 | 68.75 ± 13.52 | 74.40 ± 9.75 |
| Double Support (%) | 18.19 ± 13.64 | 26.40 ± 11.75 | 17.89 ± 15.19 | 25.65 ± 12.97 | 31.78 ± 10.60 | 23.73 ± 9.56 | 21.05 ± 12.32 | 21.61 ± 10.34 | 25.71 ± 18.01 | 21.11 ± 8.48 | 33.84 ± 12.29 | 28.88 ± 10.07 |
| Stance Phase (%) | 53.62 ± 7.72 | 60.47 ± 5.97 | 58.48 ± 5.64 | 57.43 ± 4.51 | 61.80 ± 3.57 | 58.41 ± 2.21 | 54.65 ± 4.89 | 54.52 ± 4.00 | 59.26 ± 3.74 | 57.49 ± 3.87 | 61.12 ± 4.56 | 62.86 ± 11.57 |
| Swing Phase (%) | 46.38 ± 7.72 | 39.53 ± 5.97 | 41.52 ± 5.64 | 42.57 ± 4.51 | 38.20 ± 3.57 | 41.59 ± 2.21 | 45.35 ± 4.89 | 45.48 ± 4.00 | 40.74 ± 3.74 | 42.51 ± 3.87 | 38.88 ± 4.56 | 37.14 ± 11.57 |
| Gait Velocity (m/s) | 0.93 ± 0.38 | 0.78 ± 0.27 | 0.67 ± 0.20 | 1.28 ± 0.40 | 1.16 ± 0.25 | 1.14 ± 0.33 | 1.19 ± 0.32 | 1.17 ± 0.50 | 1.21 ± 0.51 | 1.12 ± 0.29 | 1.24 ± 0.45 | 0.94 ± 0.43 |
| Step Length (m) | 0.57 ± 0.18 | 0.54 ± 0.17 | 0.41 ± 0.06 | 0.59 ± 0.14 | 0.58 ± 0.15 | 0.48 ± 0.15 | 0.52 ± 0.14 | 0.46 ± 0.10 | 0.50 ± 0.14 | 0.57 ± 0.16 | 0.52 ± 0.14 | 0.49 ± 0.14 |
| Stride Length (m) | 1.35 ± 0.35 | 1.26 ± 0.38 | 0.96 ± 0.37 | 1.44 ± 0.21 | 1.42 ± 0.24 | 1.29 ± 0.37 | 1.30 ± 0.34 | 1.19 ± 0.38 | 1.25 ± 0.39 | 1.33 ± 0.32 | 1.29 ± 0.35 | 1.19 ± 0.39 |
| Step Frequency (steps/min) | 62.28 ± 15.00 | 59.32 ± 18.72 | 72.95 ± 17.26 | 73.72 ± 15.67 | 73.99 ± 16.91 | 70.87 ± 17.20 | 86.30 ± 20.78 | 89.49 ± 13.29 | 73.22 ± 14.27 | 74.53 ± 12.37 | 79.61 ± 12.67 | 72.67 ± 17.52 |
| Walk Ratio (mm/step/min) | 10.18 ± 5.71 | 10.48 ± 5.62 | 6.00 ± 2.03 | 8.59 ± 3.44 | 8.60 ± 3.88 | 7.38 ± 3.67 | 6.74 ± 3.42 | 5.38 ± 1.83 | 7.33 ± 3.42 | 8.05 ± 3.28 | 6.93 ± 3.18 | 8.17 ± 7.00 |
| Type of Test | WST Slow | WST Normal | WST High | TUG | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Groups Compared | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD |
| Recordings per Group | 52/36 | 52/14 | 36/14 | 52/36 | 52/14 | 36/14 | 52/36 | 52/14 | 36/14 | 52/36 | 52/14 | 36/14 |
| Left Step Duration (s) | 0.53 | 0.29 | 0.22 | <0.01 | <0.01 | 0.29 | 0.29 | 0.39 | 0.99 | <0.01 | 0.81 | <0.01 |
| Right Step Duration (s) | 0.50 | 0.71 | 0.43 | 0.42 | 0.72 | 0.81 | 0.01 | 0.72 | 0.19 | 0.02 | 0.06 | 0.92 |
| Step Duration (s) | 0.56 | 0.38 | 0.22 | 0.01 | 0.02 | 0.49 | 0.36 | 0.51 | 0.17 | 0.08 | 0.37 | 0.01 |
| Stride Duration (s) | 0.49 | 0.43 | 0.24 | 0.01 | 0.02 | 0.50 | 0.34 | 0.60 | 0.15 | 0.08 | 0.25 | 0.01 |
| Single Support Time (s) | 0.82 | 0.02 | 0.15 | 0.06 | 0.09 | 0.01 | 0.86 | 0.09 | 0.05 | 0.02 | 0.57 | 0.05 |
| Double Support Time (s) | <0.01 | <0.01 | 0.63 | <0.01 | <0.01 | 0.62 | 0.47 | <0.01 | <0.01 | 0.16 | 0.18 | 0.77 |
| Stance Time (s) | 0.08 | 0.54 | 0.52 | <0.01 | 0.04 | 0.86 | 0.21 | 0.07 | <0.01 | 0.96 | 0.03 | 0.06 |
| Swing Time (s) | 0.03 | <0.01 | <0.01 | <0.01 | 0.83 | 0.01 | 0.60 | 0.01 | <0.01 | <0.01 | <0.01 | 0.91 |
| Single Support (%) | 0.15 | 0.15 | 0.62 | 0.01 | 0.36 | 0.03 | 0.56 | <0.01 | <0.01 | 0.10 | 0.07 | 0.63 |
| Double Support (%) | <0.01 | 0.10 | 0.71 | <0.01 | 0.02 | 0.38 | 0.23 | <0.01 | <0.01 | 0.05 | 0.35 | 0.53 |
| Stance Phase (%) | <0.01 | <0.01 | 0.03 | <0.01 | 0.01 | 0.16 | 0.12 | <0.01 | <0.01 | <0.01 | <0.01 | 0.02 |
| Swing Phase (%) | <0.01 | <0.01 | 0.03 | <0.01 | 0.01 | 0.16 | 0.12 | <0.01 | <0.01 | <0.01 | <0.01 | 0.02 |
| Gait Velocity (m/s) | <0.01 | <0.01 | 0.44 | <0.01 | <0.01 | 0.05 | 0.31 | <0.01 | <0.01 | 0.01 | <0.01 | 0.04 |
| Step Length (m) | <0.01 | <0.01 | 0.16 | <0.01 | <0.01 | 0.01 | 0.07 | <0.01 | <0.01 | <0.01 | <0.01 | 0.47 |
| Stride Length (m) | <0.01 | <0.01 | 0.14 | <0.01 | <0.01 | 0.02 | 0.08 | <0.01 | <0.01 | <0.01 | 0.03 | 0.75 |
| Step Frequency (steps/min) | <0.01 | 0.01 | 0.12 | <0.01 | <0.01 | 0.42 | 0.85 | 0.18 | 0.09 | <0.01 | <0.01 | 0.10 |
| Walk Ratio (mm/(step/min) | 0.02 | <0.01 | 0.06 | 0.03 | <0.01 | 0.01 | 0.07 | 0.11 | <0.01 | <0.01 | 0.02 | 0.15 |
| Type of Test | WST Slow | WST Normal | WST High | TUG | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Group of Participants | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD | S/EL | S/PD | EL/PD |
| Number of Recordings | 26/18 | 26/7 | 18/7 | 26/18 | 26/7 | 18/7 | 26/18 | 26/7 | 18/7 | 26/18 | 26/7 | 18/7 |
| Left Step Duration (s) | 0.72 | 0.97 | 0.85 | 0.90 | 0.66 | 0.59 | 0.55 | 0.44 | 0.75 | 0.01 | 0.64 | 0.04 |
| Right Step Duration (s) | 0.35 | 0.57 | 0.36 | 0.47 | 0.34 | 0.10 | 0.08 | 0.21 | 0.98 | 0.24 | 0.13 | 0.33 |
| Step Duration (s) | 0.30 | 0.21 | 0.11 | 0.96 | 0.55 | 0.59 | 0.36 | 0.32 | 0.09 | 0.28 | 0.18 | 0.18 |
| Stride Duration (s) | 0.34 | 0.66 | 0.35 | 0.51 | 0.60 | 0.19 | 0.43 | 0.77 | 0.81 | 0.08 | 0.17 | 0.11 |
| Steps Number | <0.01 | 0.71 | 0.14 | 0.94 | 0.59 | 0.65 | 0.08 | 0.77 | 0.41 | <0.01 | 0.38 | 0.09 |
| Single Support Time (s) | 0.02 | 0.55 | 0.34 | 0.54 | 0.84 | 0.50 | 0.94 | 0.17 | 0.16 | <0.01 | 0.12 | 0.70 |
| Double Support Time (s) | 0.03 | 0.97 | 0.17 | 0.06 | 0.79 | 0.24 | 0.92 | 0.07 | 0.06 | 0.19 | 0.07 | 0.21 |
| Stance Time (s) | 0.24 | 0.01 | 0.05 | <0.01 | 0.79 | 0.07 | 0.53 | 0.50 | 0.20 | 0.01 | 0.87 | 0.35 |
| Swing Time (s) | 0.95 | 0.20 | 0.20 | 0.06 | 0.49 | 0.53 | 0.73 | 0.16 | 0.05 | <0.01 | 0.05 | 0.22 |
| Single Support (%) | 0.05 | 0.88 | 0.15 | 0.10 | 0.71 | 0.09 | 0.87 | 0.45 | 0.50 | <0.01 | 0.01 | 0.25 |
| Double Support (%) | <0.01 | 0.16 | 0.44 | <0.01 | 0.58 | 0.02 | 0.92 | 0.03 | 0.01 | 0.00 | 0.03 | 0.56 |
| Stance Phase (%) | <0.01 | 0.16 | 0.44 | <0.01 | 0.58 | 0.02 | 0.92 | 0.03 | 0.01 | 0.00 | 0.03 | 0.56 |
| Swing Phase (%) | 0.10 | 0.08 | 0.43 | 0.27 | 0.39 | 0.83 | 0.89 | 0.87 | 0.86 | 0.31 | 0.13 | 0.08 |
| Gait Velocity (m/s) | 0.73 | 0.03 | 0.07 | 0.80 | 0.07 | 0.14 | 0.14 | 0.74 | 0.47 | 0.27 | 0.14 | 0.60 |
| Step Length (m) | 0.25 | 0.01 | 0.12 | 0.73 | 0.15 | 0.30 | 0.34 | 0.76 | 0.74 | 0.73 | 0.25 | 0.44 |
| Stride Length (m) | 0.41 | 0.11 | 0.10 | 0.95 | 0.68 | 0.68 | 0.57 | 0.15 | 0.01 | 0.19 | 0.70 | 0.21 |
| Step Frequency (steps/min) | 0.63 | 0.07 | 0.04 | 0.99 | 0.42 | 0.48 | 0.14 | 0.70 | 0.08 | 0.26 | 0.94 | 0.51 |
| Walk Ratio (mm/(step/min) | 0.72 | 0.97 | 0.85 | 0.90 | 0.66 | 0.59 | 0.55 | 0.44 | 0.75 | 0.01 | 0.64 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chatzaki, C.; Skaramagkas, V.; Tachos, N.; Christodoulakis, G.; Maniadi, E.; Kefalopoulou, Z.; Fotiadis, D.I.; Tsiknakis, M. The Smart-Insole Dataset: Gait Analysis Using Wearable Sensors with a Focus on Elderly and Parkinson’s Patients. Sensors 2021, 21, 2821. https://doi.org/10.3390/s21082821
Chatzaki C, Skaramagkas V, Tachos N, Christodoulakis G, Maniadi E, Kefalopoulou Z, Fotiadis DI, Tsiknakis M. The Smart-Insole Dataset: Gait Analysis Using Wearable Sensors with a Focus on Elderly and Parkinson’s Patients. Sensors. 2021; 21(8):2821. https://doi.org/10.3390/s21082821
Chicago/Turabian StyleChatzaki, Chariklia, Vasileios Skaramagkas, Nikolaos Tachos, Georgios Christodoulakis, Evangelia Maniadi, Zinovia Kefalopoulou, Dimitrios I. Fotiadis, and Manolis Tsiknakis. 2021. "The Smart-Insole Dataset: Gait Analysis Using Wearable Sensors with a Focus on Elderly and Parkinson’s Patients" Sensors 21, no. 8: 2821. https://doi.org/10.3390/s21082821
APA StyleChatzaki, C., Skaramagkas, V., Tachos, N., Christodoulakis, G., Maniadi, E., Kefalopoulou, Z., Fotiadis, D. I., & Tsiknakis, M. (2021). The Smart-Insole Dataset: Gait Analysis Using Wearable Sensors with a Focus on Elderly and Parkinson’s Patients. Sensors, 21(8), 2821. https://doi.org/10.3390/s21082821