
Rugged and Compact Three-Axis Force/Torque Sensor for Wearable Robots

 ,
,  ,
,  , , and
, , and
Abstract
1. Introduction
2. Development of the Proposed Sensor
2.1. Design of the Proposed Sensor
2.2. Sensing Principle
2.3. Fabrication Process
3. Experimental Evaluation
3.1. Calibration Using Deep Neural Network
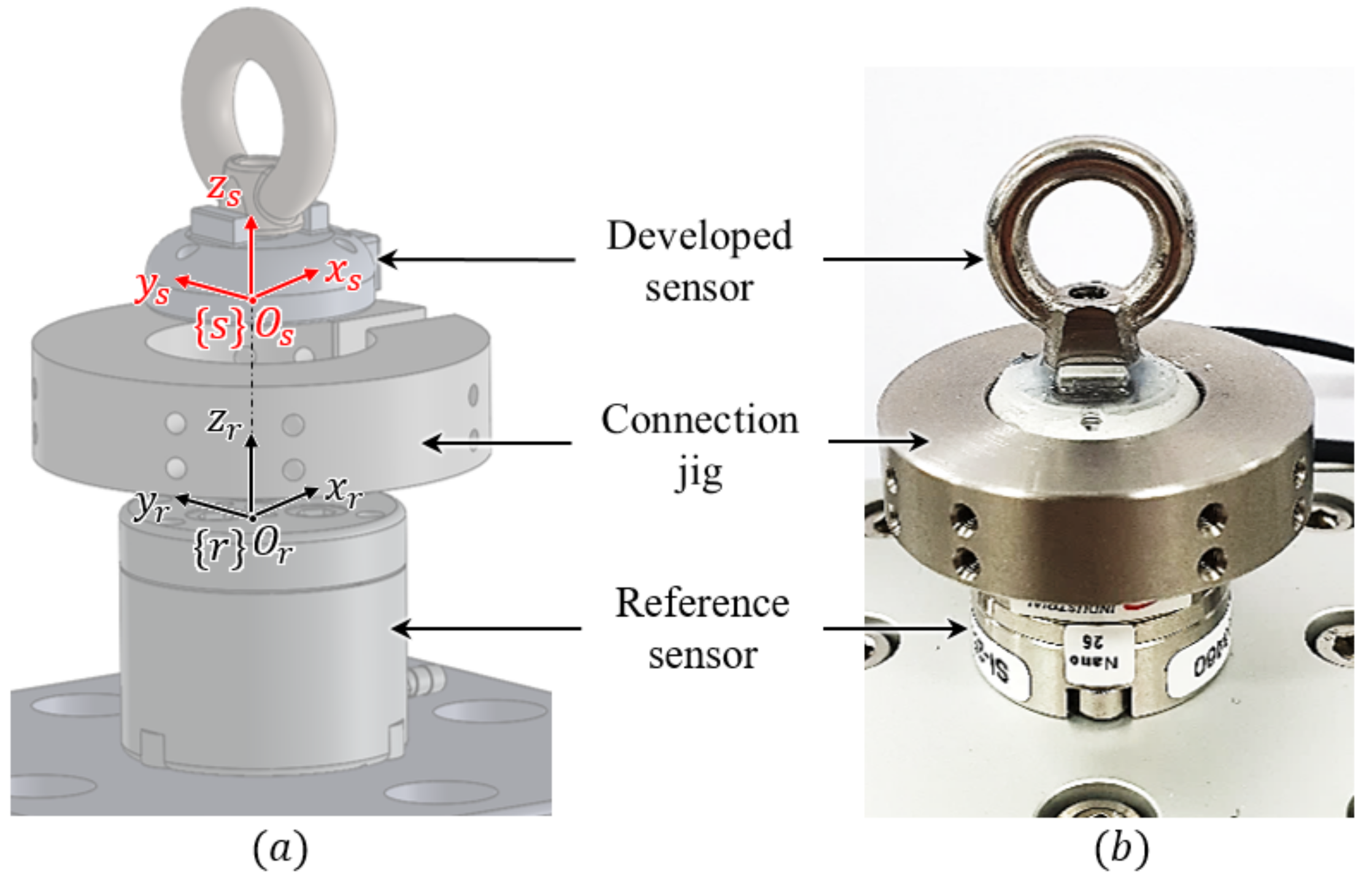
3.2. Experiments
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, H.; Lin, M.; Jin, Z.; Yan, H.; Liu, S.; Hu, X. A 4-dof workspace lower limb rehabilitation robot: Mechanism design, human joint analysis and trajectory planning. Appl. Sci. 2020, 10, 4542. [Google Scholar] [CrossRef]
- Rzyman, G.; Szkopek, J.; Redlarski, G.; Palkowski, A. Upper limb bionic orthoses: General overview and forecasting changes. Appl. Sci. 2020, 10, 5323. [Google Scholar] [CrossRef]
- Liu, Y.; Takeda, Y. Kineto-static analysis of a wrist rehabilitation robot with compliance and passive joints for joint misalignment compensation. Appl. Sci. 2020, 8, 23. [Google Scholar] [CrossRef]
- Wu, J.; Gao, J.; Song, R.; Li, R.; Li, Y.; Jiang, L. The design and control of a 3dof lower limb rehabilitation robot. Mechatronics 2016, 33, 13–22. [Google Scholar] [CrossRef]
- Deng, J.; Wang, P.; Li, M.; Guo, W.; Zha, F.; Wang, X. Structure design of active power-assist lower limb exoskeleton APAL robot. Adv. Mech. Eng. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Hassanin, A.; Steve, D.; Samia, N. A novel, soft, bending actuator for use in power aasist and rehabilitation exoskeletons. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 533–538. [Google Scholar]
- Kobayashi, H.; Suzuki, H.; Nozaki, H.; Tsuhi, T. Development of power assist system for manual worker by muscle suit. In Proceedings of the 2007 16th IEEE International Conference on Robot & Human Interactive Communication, Jeju, Korea, 26–29 August 2007; pp. 332–337. [Google Scholar]
- Chu, G.; Hong, J.; Jeong, D.; Kim, D.; Kim, S.; Jeong, S.; Choo, J. The experiments of wearable robot for carrying heavy-weight objects of shipbuilding works. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), Taipei, Taiwan, 18–22 August 2014; pp. 978–983. [Google Scholar]
- Friedl, K.E. Military applications of soldier physiological monitoring. J. Sci. Med. Sport 2018, 21, 1147–1153. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Seo, K.; Hyung, S.; Shim, Y.; Lim, S. Compact hip-force sensor for a gait-assistance exoskeleton system. Sensors 2018, 18, 566. [Google Scholar] [CrossRef] [PubMed]
- Grosu, V.; Grosu, S.; Vanderborght, B.; Lefeber, D.; Rodriguez-Guerrero, C. Multi-axis force sensor for human-robot interaction sensing in a rehabilitation robotic device. Sensors 2017, 17, 1294. [Google Scholar] [CrossRef] [PubMed]
- Morales, A.R.R.; Zaghloul, M. Highly sensitive wearable piezoelectric force sensor with quasi-static load testing. IEEE Sens. J. 2018, 24, 9910–9918. [Google Scholar] [CrossRef]
- Gu, G.; Lee, D.; Kim, J. Development of a low cost force sensor for wearable robotic systems. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 1450–1455. [Google Scholar]
- McGinnis, P. Biomechanics of Sport and Exercise, 3rd ed.; Human Kinetic: Champaign, IL, USA, 2013. [Google Scholar]
- Lee, D.; Kim, U.; Gulrez, T.; Yoon, W.J.; Hannaford, B.; Choi, H.R. A laparoscopic grasping tool with force sensing capability. IEEE/ASME Trans. Mechatron. 2016, 21, 130–141. [Google Scholar]
- Kim, U.; Lee, D.; Yoon, W.J.; Hannaford, B.; Choi, H.R. Force sensor integrated surgical forceps for minimally invasive robotic surgery. IEEE Trans. Robot. 2015, 31, 1214–1224. [Google Scholar] [CrossRef]
- Kim, U.; Lee, D.; Seok, D.; Choi, H.R. A novel 6-axis force/torque sensor for robotic applications. IEEE/ASME Trans. Mechatron. 2017, 22, 1381–1391. [Google Scholar] [CrossRef]
- Kim, U.; Kim, Y.B.; So, J.; Seok, D.; Choi, H.R. Sensorized surgical forceps for robotic-assisted minimally invasive surgery. IEEE Trans. Ind. Electron. 2018, 65, 9604–9613. [Google Scholar] [CrossRef]
- Kim, U.; Kim, Y.B.; Seok, D.; So, J.; Choi, H.R. A surgical palpation probe with 6-axis force/torque sensing capability for minimally invasive surgery. IEEE Trans. Ind. Electron. 2018, 65, 2755–2765. [Google Scholar] [CrossRef]
- Kim, U.; Jeong, H.; Do, H.; Park, J.; Park, C. Six-Axis force/torque fingertip sensor for an anthropomorphic robot hand. IEEE Robot. Autom. Lett. 2020, 5, 5566–5572. [Google Scholar] [CrossRef]
- Bickford, J.; Nassar, S. Handbook of Bolts and Bolted Joints, 1st ed.; CRC Press: Boca Raton, FL, USA, 1998; p. 153. [Google Scholar]
- Hill, J.M.; Lee, A.I. Large elastic compression of finite rectangular blocks of rubber. Q. J. Mech. Appl. Math. 1989, 42, 267–287. [Google Scholar] [CrossRef]
- Tiwana, M.I.; Shashank, A.; Redmond, S.J.; Lovell, N.H. Characterization of a capacitve tactile shear sensor for application in robotic and upper limb prostheses. Sens. Actuators 2011, 165, 164–172. [Google Scholar] [CrossRef]
- Oh, H.S.; Kang, G.; Kim, U.; Seo, J.K.; Choi, H.R. Calibration of 6 axis force/torque sensor by using deep-learning method. In Proceedings of the 2017 13th IEEE Conference on Automation Science and Engineering (CASE), Xi’an, China, 20–23 August 2017. [Google Scholar]
- Liu, Y.; Wang, X.; Wang, L.; Liu, D. A modified leaky ReLu scheme (MLRS) for topology optimization with multiple materials. Appl. Math. Comput. 2019, 352, 188–204. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J.L. ADAM: A method for stochastic optimization. In Proceedings of the 2014 International Conference on Learning Representations (ICLR), San Diego, CA, USA, 14 December 2014. [Google Scholar]
- Park, S.J.; Park, C.H. Suit-type wearable robot powered by shape-memory-alloy-based fabric muscle. Sci. Rep. 2019, 9, 9157. [Google Scholar] [CrossRef] [PubMed]
- Park, S.J.; Kim, U.; Park, C.H. A novel fabric muscle based on shape memory alloy springs. Soft Robot. 2020, 7, 321–331. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cell 1 | Cell 2 | Cell 3 | ||
|---|---|---|---|---|
| + | + | + | + | |
| - | - | - | - | |
| + | - | Δ | + | |
| - | + | Δ | - | |
| + | - | + | - | |
| - | + | - | + |
| Quantity | Value | Unit |
|---|---|---|
| Sensing range of force | +300 | N |
| Sensing range of torques | ±1, ±1 | Nm |
| Resolution of force | 0.25 | N |
| Resolution of torques | 1.38, 2.47 | m Nm |
| Sensitivity of force | 0.0012 | pF/N |
| Sensitivity of torques | 0.22, 0.12 | pF/Nm |
| Relative error of force and torque | 2.25, 1.71, 1.64 | % of FSR * |
| Average force repeatability | 1.75 | % of FSR * |
| Hysteresis of force | 17.3 | % of FSR * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, H.; Choi, K.; Park, S.J.; Park, C.H.; Choi, H.R.; Kim, U. Rugged and Compact Three-Axis Force/Torque Sensor for Wearable Robots. Sensors 2021, 21, 2770. https://doi.org/10.3390/s21082770
Jeong H, Choi K, Park SJ, Park CH, Choi HR, Kim U. Rugged and Compact Three-Axis Force/Torque Sensor for Wearable Robots. Sensors. 2021; 21(8):2770. https://doi.org/10.3390/s21082770
Chicago/Turabian StyleJeong, Heeyeon, Kyungjun Choi, Seong Jun Park, Cheol Hoon Park, Hyouk Ryeol Choi, and Uikyum Kim. 2021. "Rugged and Compact Three-Axis Force/Torque Sensor for Wearable Robots" Sensors 21, no. 8: 2770. https://doi.org/10.3390/s21082770
APA StyleJeong, H., Choi, K., Park, S. J., Park, C. H., Choi, H. R., & Kim, U. (2021). Rugged and Compact Three-Axis Force/Torque Sensor for Wearable Robots. Sensors, 21(8), 2770. https://doi.org/10.3390/s21082770