Plasmonic Layer as a Localized Temperature Control Element for Surface Plasmonic Resonance-Based Sensors

 , ,
, ,  ,
,
Abstract
1. Introduction
2. Design and Fabrication of a Multichannel SPR Sensor
2.1. Design and Fabrication
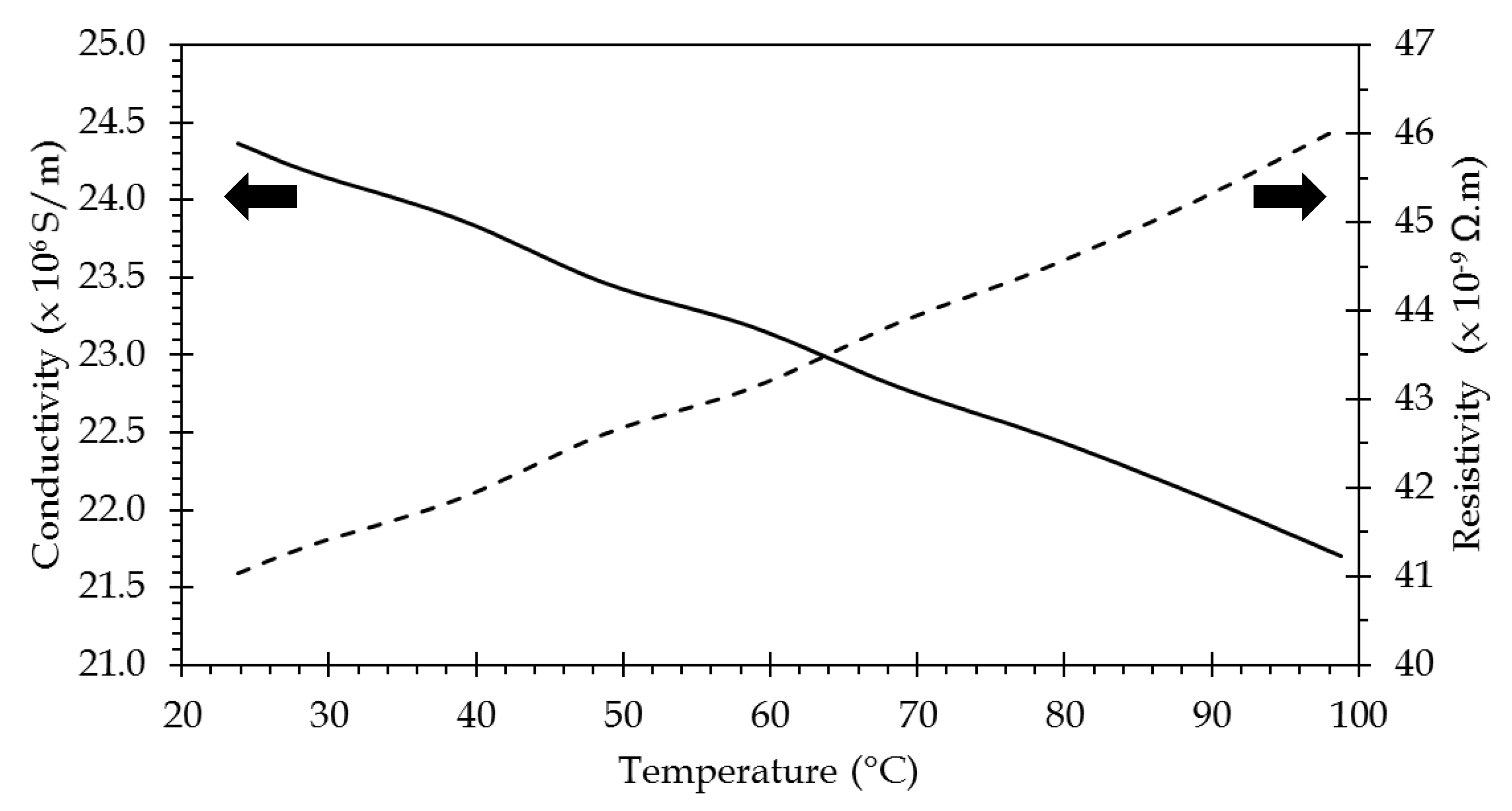
2.2. Characterization of the Electrical Properties of the Plasmonic Layer
3. Modeling of the Sensor Behavior
3.1. Temperature
3.1.1. COMSOL Modeling
- It consolidates our original goal having independent control of each channel;
- It allows us to narrow the modeling window (white delimitation in Figure 5), and thus, considerably decrease the calculation time.
3.1.2. Inclusion of Experimental Conditions into the Modeling
Thermal Camera Measurements
SPR Measurements
3.2. SPR Model
3.2.1. Current Injection
3.2.2. Temperature
- -
- temperature of water has been set to 67 °C (curve “previous + water @ 67 °C” in Figure 11);
- -
- value of H-ZF1 refractive index @67 °C is inserted (curve “previous + H-ZF1 (refractive index) @ 67 °C” in Figure 11);
- -
- value of metal refractive index @67 °C is added (curve “previous + metal (refractive index) @ 67 °C” in Figure 11);
- -
- thermal expansion of metal films is inserted (curve “previous + metal thermal expansion: all contributions @ 67 °C” in Figure 11).
4. Characterization of Thermal Behavior
4.1. Measurement Set-Up
- This holder is maintained at 60 °C. The number of emitted photons for 1° temperature rise is then higher at a base temperature of 60 °C than at 20 °C since it increases as a cubic function with absolute temperature [45].
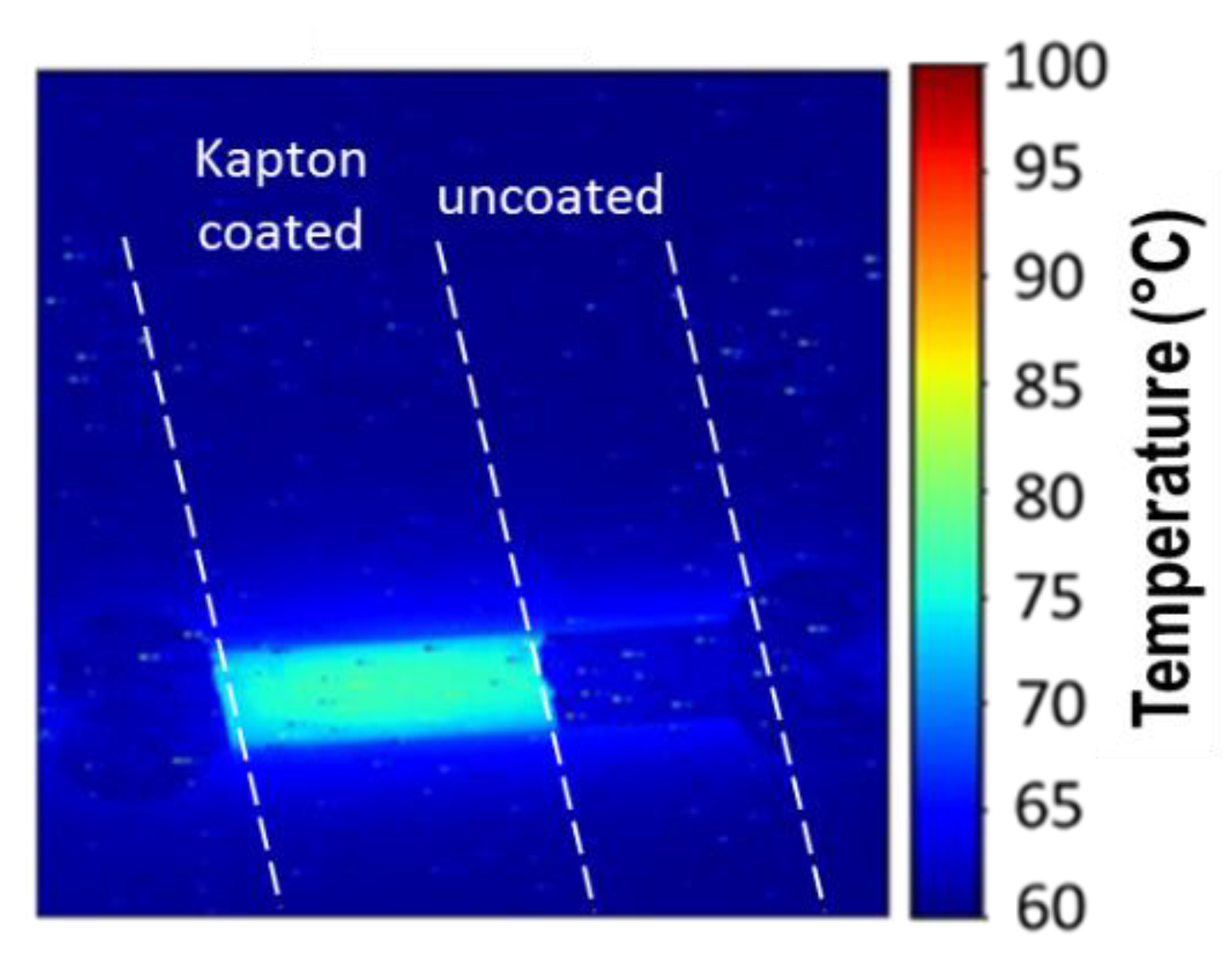
- A 50-µm thick adhesive polyimide film (Kapton) is placed onto the sensor to enhance emissivity. The evaporated gold thin films, which can be considered as polished gold, have a low emissivity coefficient value; a commonly agreed value is between 0.01 and 0.02, while the value of Kapton is between 0.75 and 0.85 [46]. The difference can be clearly observed in Figure 13, where the left part of the channel has been covered by a Kapton film and the right part is a nude gold surface: no detectable signal is discerned from the uncoated part of the channel.
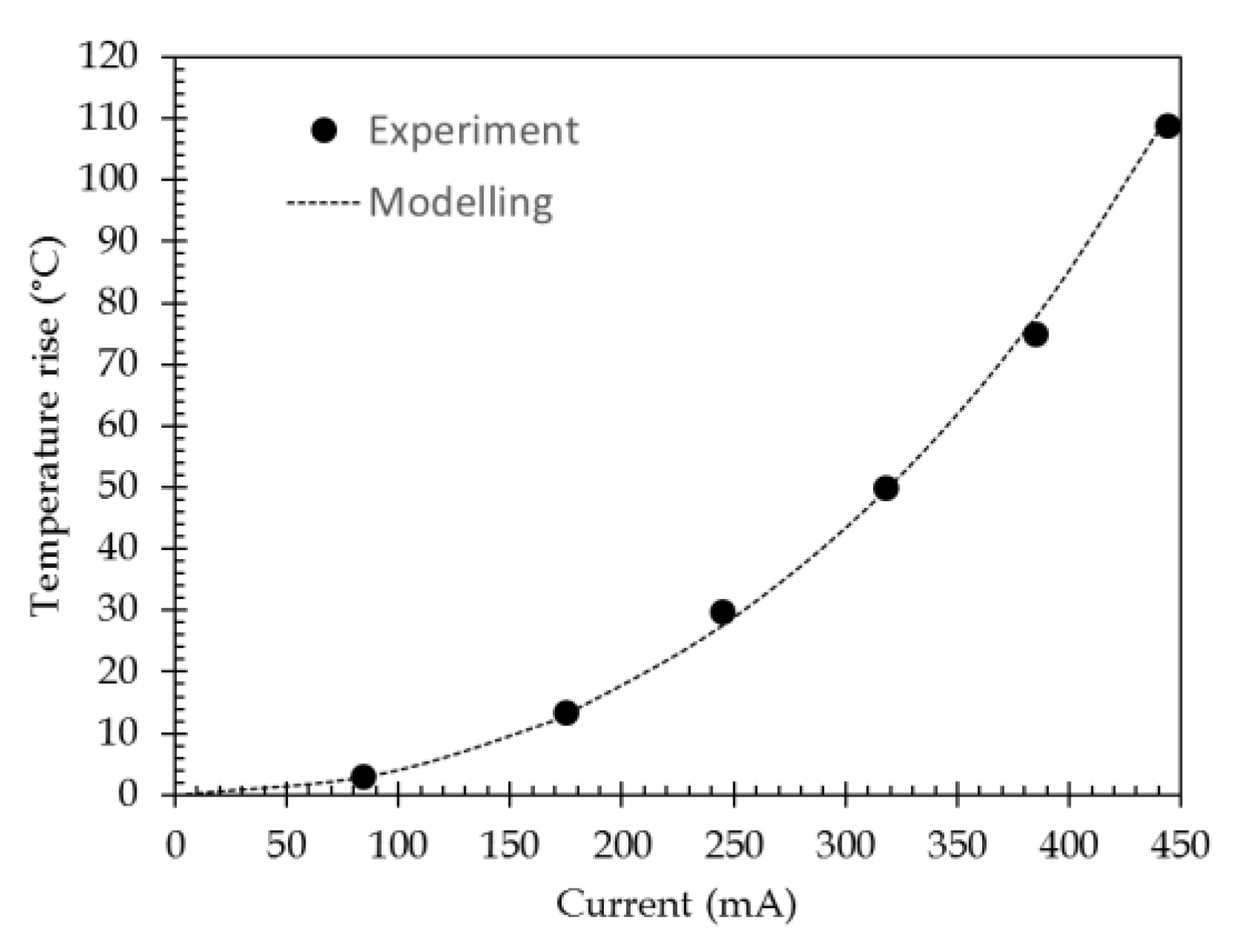
4.2. Thermal Measurements
5. Thermal Measurements on SPR Experiment
- -
- temperature rise can cross over the 1-mm thickness of sensor. In Figure 15 and for high current injection levels, it can be seen that lateral spreading of the temperature rise is not negligible, up to a couple tens of degrees, at 1 mm away from the channel edge. In a first approach, we can consider that this spreading is isotropic within the glass substrate and that such a temperature rise can be obtained on its bottom side. Such a temperature rise can then affect the matching index fluid that is used between sensor and prism. Its temperature increase will modify its refractive index and can, thus, modify the beam injection angle;
- -
- the heat transfer can increase, decreasing the temperature in the channel. This could be linked to the phenomenon that is observed, for an air environment, in Figure 15 for high current injection, where the experimental temperature profile outside the channel does not follow the theoretical one. This hypothesis has not been investigated yet, and it might be especially important for a fluid environment.
6. Conclusions
- an inherently localized temperature control;
- a versatile approach: the design of the channels can be matched to any implementation constraint. Calibration of the heating system will, nevertheless, be dependent on the design;
- a quick temperature control: a response time of a few seconds has been measured;
- a low-cost solution controlling the temperature, since no particular external system is needed.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gordon, J.G., II; Ernst, S. Surface plasmons as a probe of the electrochemical interface. Surf. Sci. 1980, 101, 499–506. [Google Scholar] [CrossRef]
- Homola, J. Surface Plasmon Resonance Sensors for Detection of Chemical and Biological Species. Chem. Rev. 2008, 108, 462–493. [Google Scholar] [CrossRef] [PubMed]
- Rodriguez-Mozaz, S.; Lopez de Alda, M.J.; Barceló, D. Biosensors as useful tools for environmental analysis and monitoring. Anal. Bioanal. Chem. 2006, 386, 1025–1041. [Google Scholar] [CrossRef] [PubMed]
- Masson, J. Surface Plasmon Resonance Clinical Biosensors for Medical Diagnostics. ACS Sens. 2017, 2, 16–30. [Google Scholar] [CrossRef]
- Mello, L.D.; Kubota, L.T. Review of the use of biosensors as analytical tools in the food and drink industries. Food Chem. 2002, 77, 237–256. [Google Scholar] [CrossRef]
- Renaud, J.-P.; Chung, C.-W.; Danielson, U.H.; Egner, U.; Hennig, M.; Hubbard, R.E.; Nar, H. Biophysics in drug discovery: Impact, challenges and opportunities. Nat. Rev. Drug Discov. 2016, 15, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Hu, G.; He, H.; Sytchkova, A.; Zhao, J.; Shao, J.; Grilli, M.; Piegari, A. High-precision measurement of optical constants of ultra-thin coating using surface plasmon resonance spectroscopic ellipsometry in Otto-Bliokh configuration. Opt. Express 2017, 25, 13425–13434. [Google Scholar] [CrossRef] [PubMed]
- Zhan, C.; Liu, B.-W.; Tian, Z.-Q.; Ren, B. Determining the Interfacial Refractive Index via Ultrasensitive Plasmonic Sensors. J. Am. Chem. Soc. 2020, 142, 10905–10909. [Google Scholar] [CrossRef]
- Fano, U. The Theory of Anomalous Diffraction Gratings and of Quasi-Stationary Waves on Metallic Surfaces (Sommerfeld’s Waves). J. Opt. Soc. Am. 1941, 31, 213–222. [Google Scholar] [CrossRef]
- Wood, R.W. Anomalous Diffraction Gratings. Phys. Rev. 1935, 48, 928–936. [Google Scholar] [CrossRef]
- Homola, J. Surface Plasmon Resonance Based Sensors; Springer Series on Chemical Sensors and Biosensors; Springer: Berlin, Germany, 2006. [Google Scholar]
- Kretschmann, E.; Raether, H. Radiative decay of nonradiative surface plasmons excited by light. Z. Naturforsch. A 1968, 23, 2135–2136. [Google Scholar] [CrossRef]
- Otto, A. Excitation of nonradiative surface plasma waves in silver by the method of frustrated total reflection. Z. Phys. A Hadron. Nucl. 1968, 216, 398–410. [Google Scholar] [CrossRef]
- Nguyen, H.H.; Park, J.; Kang, S.; Kim, M. Surface Plasmon Resonance: A versatile technique for biosensor applications. Sensors 2015, 15, 10481–10510. [Google Scholar] [CrossRef]
- Zekriti, M. Temperature Effects on the Resolution of Surface-Plasmon-Resonance-Based Sensor. Plasmonics 2019, 14, 763–768. [Google Scholar] [CrossRef]
- Özdemir, Ş.K.; Turhan-Sayan, G. Temperature Effects on Surface Plasmon Resonance: Design Considerations for an Optical Temperature Sensor. J. Lightwave Technol. 2003, 21, 805–814. [Google Scholar] [CrossRef]
- Liu, S.; Cao, S.; Zhang, Z.; Wang, Y.; Liao, C.; Wang, Y. Temperature Sensor Based on Side-Polished Fiber SPR Device Coated with Polymer. Sensors 2019, 19, 4063. [Google Scholar] [CrossRef]
- Wartell, R.M.; Benight, A.S. Thermal denaturation of DNA molecules: A comparison of theory with experiment. Phys. Rep. 1985, 126, 67–107. [Google Scholar] [CrossRef]
- Khandelwal, G.; Bhyravabhotla, J. A phenomenological model for predicting melting temperatures of DNA sequences. PLoS ONE 2010, 5, e12433. [Google Scholar] [CrossRef]
- Brunet, A.; Salomé, L.; Rousseau, P.; Destainville, N.; Manghi, M.; Tardin, C. How does temperature impact the conformation of single DNA molecules below melting temperature? Nucleic Acids Res. 2018, 46, 2074–2081. [Google Scholar] [CrossRef] [PubMed]
- Driessen, R.P.C.; Sitters, G.; Laurens, N.; Moolenaar, G.F.; Wuite, G.J.L.; Goosen, N.; Dame, R.T. Effect of Temperature on the Intrinsic Flexibility of DNA and Its Interaction with Architectural Proteins. Biochemistry 2014, 53, 6430–6438. [Google Scholar] [CrossRef]
- Zhou, J.C.; Feller, B.; Hinsberg, B.; Sethi, G.; Feldstein, P.; Hihath, J.; Seker, E.; Marco, M.; Knoesen, A.; Miller, R. Immobilization-mediated reduction in melting temperatures of DNA–DNA and DNA–RNA hybrids: Immobilized DNA probe hybridization studied by SPR. Colloids Surf. A Physicochem. Eng. Asp. 2015, 481, 72–79. [Google Scholar] [CrossRef]
- Johnstone, R.W.; Andrew, S.M.; Hogarth, M.P.; Pietersz, G.A.; McKenzie, I.F.C. The effect of temperature on the binding kinetics and equilibrium constants of monoclonal antibodies to cell surface antigens. Mol. Immunol. 1990, 27, 327–333. [Google Scholar] [CrossRef]
- Chen, W.-Y.; Huang, H.-M.; Lin, C.-C.; Lin, F.-Y.; Chan, Y.C. Effect of Temperature on Hydrophobic Interaction between Proteins and Hydrophobic Adsorbents: Studies by Isothermal Titration Calorimetry and the van’t Hoff Equation. Langmuir 2003, 19, 9395–9403. [Google Scholar] [CrossRef]
- Stan, R.C.; Françoso, K.S.; Alves, R.P.S.; Ferreira, L.C.S.; Soares, I.S.; de Camargo, M.M. Febrile temperatures increase in vitro antibody affinity for malarial and dengue antigens. PLoS Negl. Trop. Dis. 2019, 13, e0007239. [Google Scholar] [CrossRef]
- Marchand, A.; Czar, M.F.; Eggel, E.N.; Kaeslin, J.; Zenobi, R. Studying biomolecular folding and binding using temperature-jump mass spectrometry. Nat. Commun. 2020, 11, 566. [Google Scholar] [CrossRef]
- Oh, E.; Jackman, J.A.; Yorulmaz, S.; Zhdanov, V.P.; Lee, H.; Cho, N.-J. Contribution of Temperature to Deformation of Adsorbed Vesicles Studied by Nanoplasmonic Biosensing. Langmuir 2015, 31, 771–781. [Google Scholar] [CrossRef] [PubMed]
- Sambles, J.R.; Elsom, K.C.; Jarvis, D.J. The electrical resistivity of gold films. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Sci. 1982, 304, 365–396. Available online: http://www.jstor.org/stable/37007 (accessed on 9 September 2020).
- Vries, J.W.C. Surface scattering in thin evaporated gold doublelayers studied by in situ resistivity measurements. J. Phys. F Met. Phys. 1987, 17, 2403–2409. [Google Scholar] [CrossRef]
- Adamov, M.; Perović, B.; Nenadović, T. Electrical and structural properties of thin gold films obtained by vacuum evaporation and sputtering. Thin Solid Films 1974, 24, 89–100. [Google Scholar] [CrossRef]
- Frei, W. Modeling Natural and Forced Convection in COMSOL Multiphysics®. Available online: https://www.comsol.com/blogs/modeling-natural-and-forced-convection-in-comsol-multiphysics/ (accessed on 11 March 2021).
- Brooks, D.G.; Adam, J. PCB Trace and Via Currents and Temperatures: The Complete Analysis, 2nd ed.; Createspace Independent Publishing Platform: Scotts Valley, CA, USA, 2017. [Google Scholar]
- Chang, N. Accurate Thermal Analysis, Including Thermal Coupling of On-Chip Hot Interconnect. 15 October 2015. Available online: https://semiengineering.com/accurate-thermal-analysis-including-thermal-coupling-of-on-chip-hot-interconnect/ (accessed on 9 September 2020).
- Palm, W.J.; Marciniak, M.A.; Perram, G.P.; Gross, K.C.; Baley, W.F.; Walters, C.T. Wavelength and temperature dependence of continuous-wave laser absorptance in Kapton® films. Opt. Eng. 1982, 51, 121802. [Google Scholar] [CrossRef]
- Dinçer, I.; Zamfirescu, C. Drying Phenomena: Theory and Applications, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Yamamoto, M. Surface Plasmon Resonance (SPR) Theory: Tutorial. Rev. Polarogr. 2002, 48, 209–237. [Google Scholar] [CrossRef]
- Bliokh, K.Y.; Rodriguez-Fortuno, F.J.; Bekshaev, A.Y.; Kivshar, Y.S.; Nori, F. Electric current induced unidirectional propagation of surface plasmon-polaritons. Opt. Lett. 2018, 43, 963–966. [Google Scholar] [CrossRef] [PubMed]
- Landau, L.D.; Lifshitz, E.M. Physical Kinetics; Course of Theoretical Physics, 10; Pergamon International Library: Oxford, UK, 1981. [Google Scholar]
- Rakić, A.D.; Djurišić, A.B.; Elazar, J.M.; Majewski, M.L. Optical properties of metallic films for vertical-cavity optoelectronic devices. Appl. Opt. 1998, 37, 5271–5283. [Google Scholar] [CrossRef]
- Herminghaus, S.; Leiderer, P. Surface Plasmon Enhanced Transient Thermoreflectance. Appl. Phys. A 1990, 51, 350–353. [Google Scholar] [CrossRef]
- Faurie, D.; Renault, P.-O.; Le Bourhis, E.; Goudeau, P. Study of texture effect on elastic properties of Au thin films by X-ray diffraction and in situ tensile testing. Acta Mater. 2006, 54, 4503–4513. [Google Scholar] [CrossRef]
- Schott, A.G. Technical Information TIE-19, Temperature Coefficient of the Refractive Index. 2016. Available online: https://www.schott.com/d/advanced_optics/3794eded-edd2-461d-aec5-0a1d2dc9c523/1.1/schott_tie-19_temperature_coefficient_of_refractive_index_eng.pdf (accessed on 11 March 2021).
- Refractive index database. Available online: https://refractiveindex.info/?shelf=glass&book=CDGM-ZF&page=H-ZF1 (accessed on 11 March 2021).
- Bashkatov, A.N.; Genina, E.A. Water refractive index in dependence on temperature and wavelength: A simple approximation. In Proceedings of the Saratov Fall Meeting 2002: Optical Technologies in Biophysics and Medicine IV, Saratov, Russian, 1–4 October 2002; Tuchin, V.V., Ed.; SPIE: Bellingham, WA, USA, 2003; Volume 5068, pp. 393–395. [Google Scholar]
- Infrascope User’s Manual; Quantum Focus Instruments Corp.: Vista, CA, USA, 2005.
- Okada, T.; Ishige, R.; Ando, S. Analysis of Thermal Radiation Properties of Polyimide and Polymeric Materials Based on ATR-IR spectroscopy. J. Photopolym. Sci. Technol. 2016, 29, 251–254. [Google Scholar] [CrossRef]
- Hemberger, F.; Göbel, A.; Ebert, H.-P. Determination of the Thermal Diffusivity of Electrically Non-Conductive Solids in the Temperature Range from 80 K to 300 K by Laser-Flash Measurement. Int. J. Thermophys. 2010, 31, 2187–2200. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Glass | Gold | Unit | |
|---|---|---|---|
| Density (ρ) | 2730 | 17,000 | kg/m3 |
| Thermal conductivity (κ) | 0.85 | 300 | W/(m.K) |
| Heat capacity (Cp) | 730 | 128.8 | J/(Kg.K) |
| Electrical conductivity (σ) | From measurement (see Section 2.2) | S/m |
| Parameters Inserted in the Modeling | Minimum Position (nm) | Variation of Minimum Position Versus Reference Case (nm) | Relative Variation (nm) |
|---|---|---|---|
| Reference (all the system is at 20 °C) but current is injected | 769.23 | - | - |
| Added: refractive index of water @ 67 °C | 738.57 | −30.66 | - |
| Added: refractive index of H-ZF1@ 67 °C | 738.74 | −30.49 | +0.17 |
| Added: refractive index of metals @ 67 °C | 743.11 | −26.12 | +4.37 |
| Added: metal thermal expansion @ 67 °C (All contributions) | 742.95 | −26.28 | −0.16 |
| Current (mA) | Temperature Rise (°C) | Absolute Temperature (°C) | Water Refractive index (RIU) [43] | ΔRI (10−3 RIU) (Versus Reference at 20 °C) |
|---|---|---|---|---|
| 0 | 0 | 20 | 1.326440 | 0.000 |
| 100 | 1.74 | 21.74 | 1.326290 | −0.149 |
| 150 | 7.00 | 27.00 | 1.325783 | −0.657 |
| 200 | 15.95 | 35.95 | 1.324732 | −1.707 |
| 250 | 27.64 | 47.64 | 1.323039 | −3.401 |
| 300 | 41.84 | 61.84 | 1.320557 | −5.883 |
| 350 | 59.05 | 79.05 | 1.317045 | −9.395 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ganesan, S.; Maricot, S.; Robillard, J.-F.; Okada, E.; Bakouche, M.-T.; Hay, L.; Vilcot, J.-P. Plasmonic Layer as a Localized Temperature Control Element for Surface Plasmonic Resonance-Based Sensors. Sensors 2021, 21, 2035. https://doi.org/10.3390/s21062035
Ganesan S, Maricot S, Robillard J-F, Okada E, Bakouche M-T, Hay L, Vilcot J-P. Plasmonic Layer as a Localized Temperature Control Element for Surface Plasmonic Resonance-Based Sensors. Sensors. 2021; 21(6):2035. https://doi.org/10.3390/s21062035
Chicago/Turabian StyleGanesan, Sivaramakrishnan, Sophie Maricot, Jean-Francois Robillard, Etienne Okada, Mohamed-Taieb Bakouche, Laurent Hay, and Jean-Pierre Vilcot. 2021. "Plasmonic Layer as a Localized Temperature Control Element for Surface Plasmonic Resonance-Based Sensors" Sensors 21, no. 6: 2035. https://doi.org/10.3390/s21062035
APA StyleGanesan, S., Maricot, S., Robillard, J.-F., Okada, E., Bakouche, M.-T., Hay, L., & Vilcot, J.-P. (2021). Plasmonic Layer as a Localized Temperature Control Element for Surface Plasmonic Resonance-Based Sensors. Sensors, 21(6), 2035. https://doi.org/10.3390/s21062035