
Estimation of Axle Torque for an Agricultural Tractor Using an Artificial Neural Network




Abstract
1. Introduction
2. Materials and Methods
2.1. Tractor
2.2. Data Measurement
- ET, in Nm;
- ES, in rpm;
- FC, in L·h−1;
- AT, in Nm;
- AS, in rpm;
- TS, in km·h−1; and
- TD, in cm.
2.3. Data Collection
2.4. Data Processing
2.5. Multiple Linear Regression Analysis
2.6. Artificial Neural Networks (ANNs)
2.7. Software
2.8. Performance Evaluation Parameters
3. Results
3.1. Data Analysis
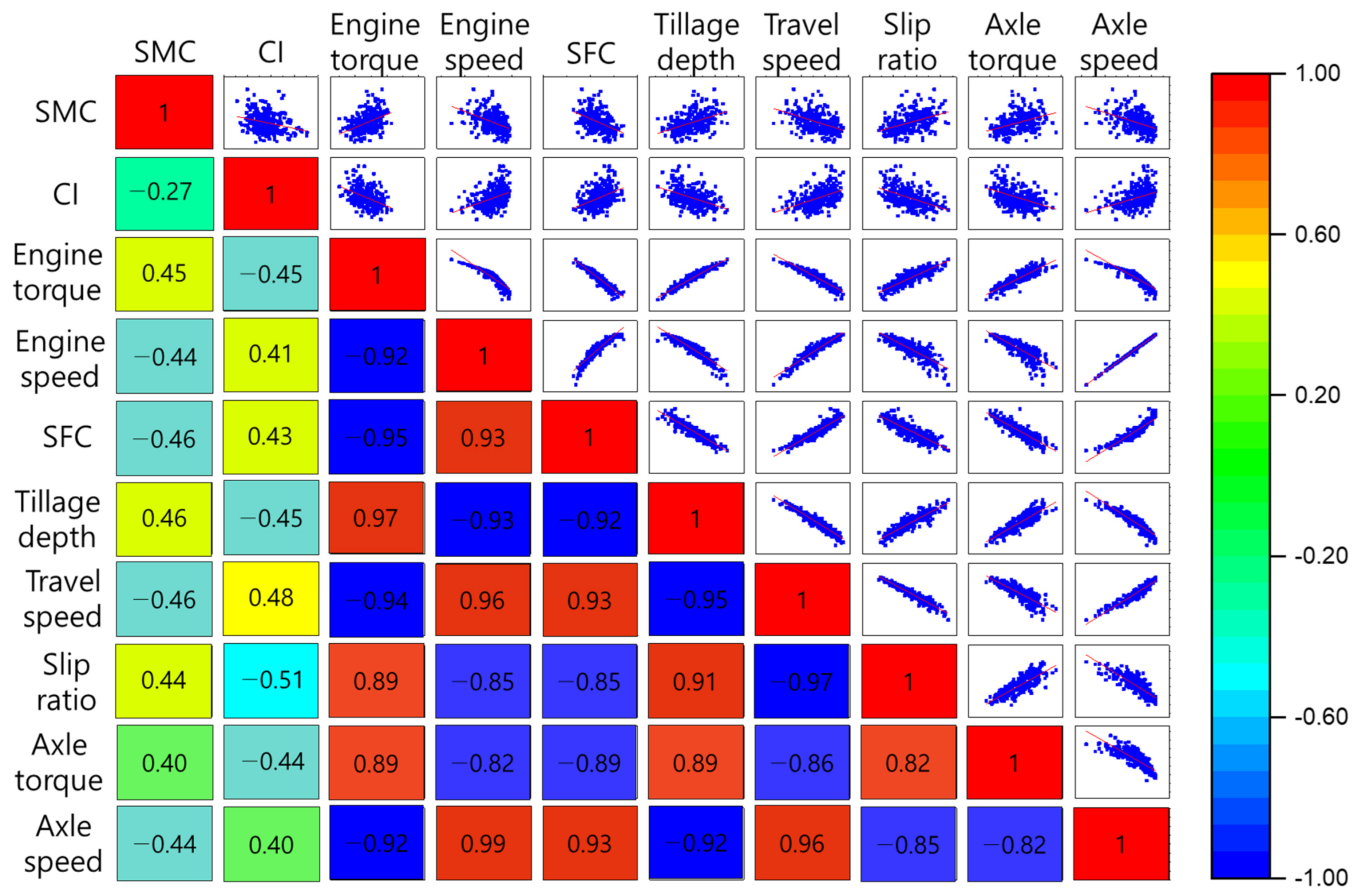
3.2. Correlation Analysis
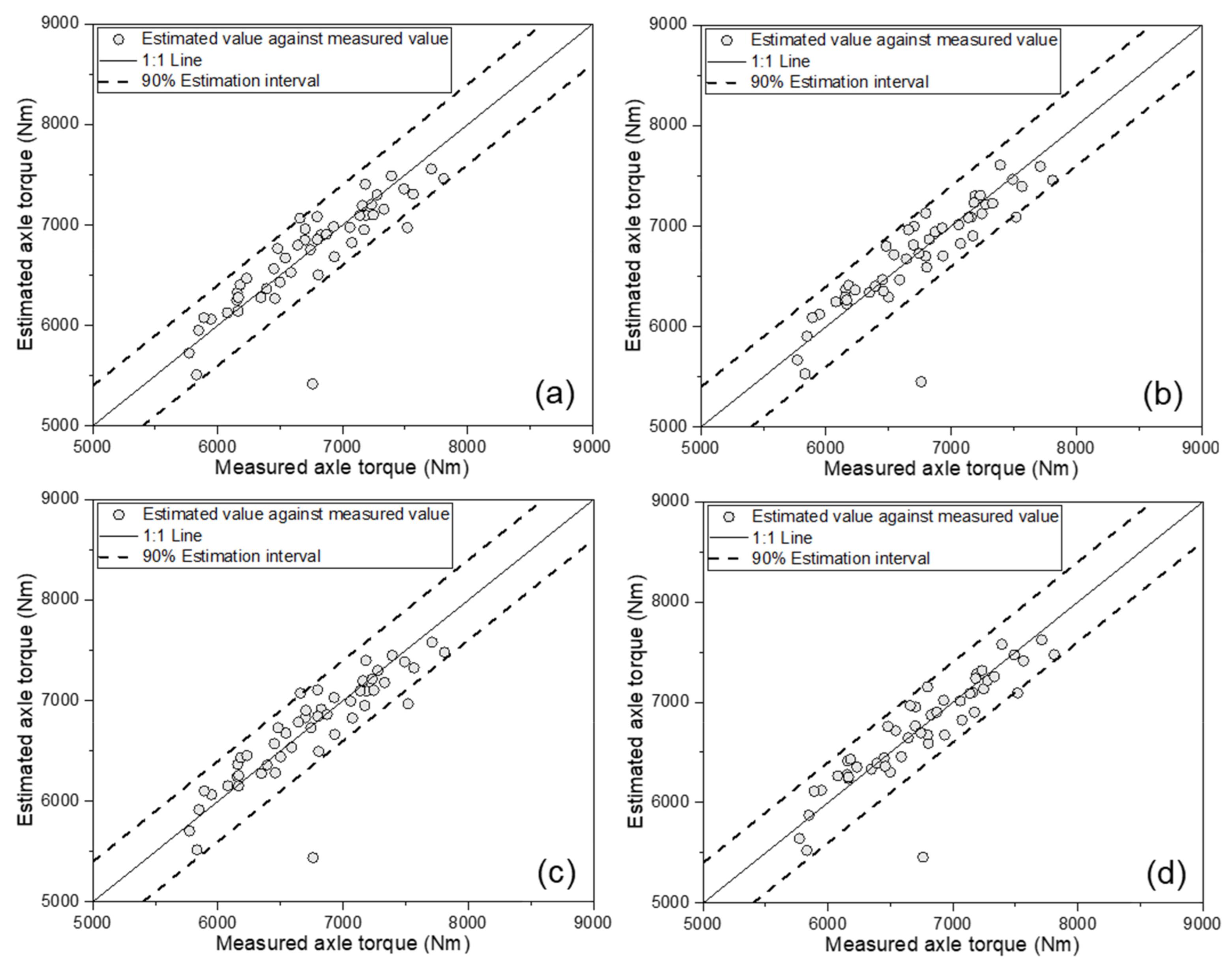
3.3. Estimation of Tractor Axle Torque Using Multiple Linear Regression
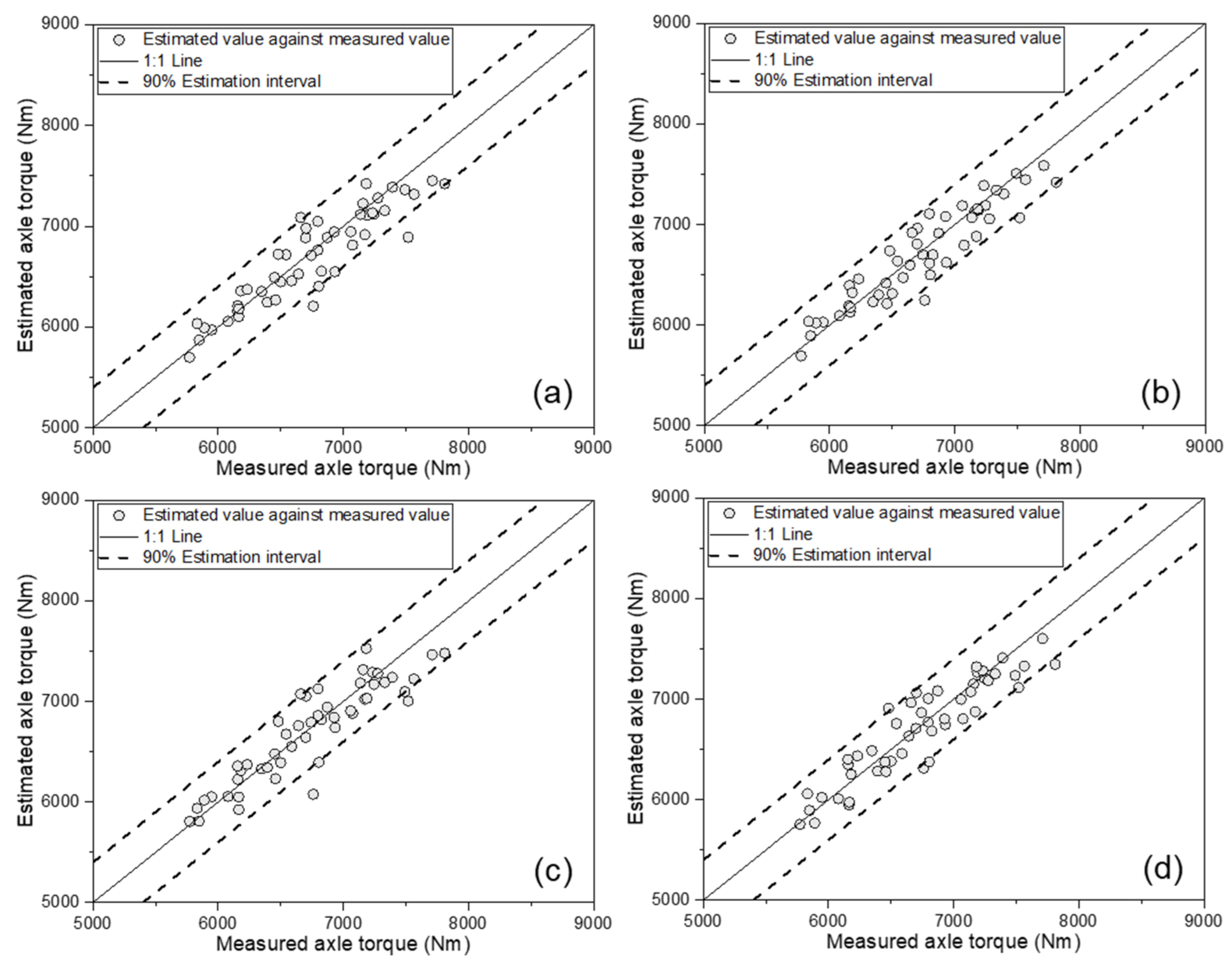
3.4. Estimation of Tractor Axle Torque Using Artificial Neural Network
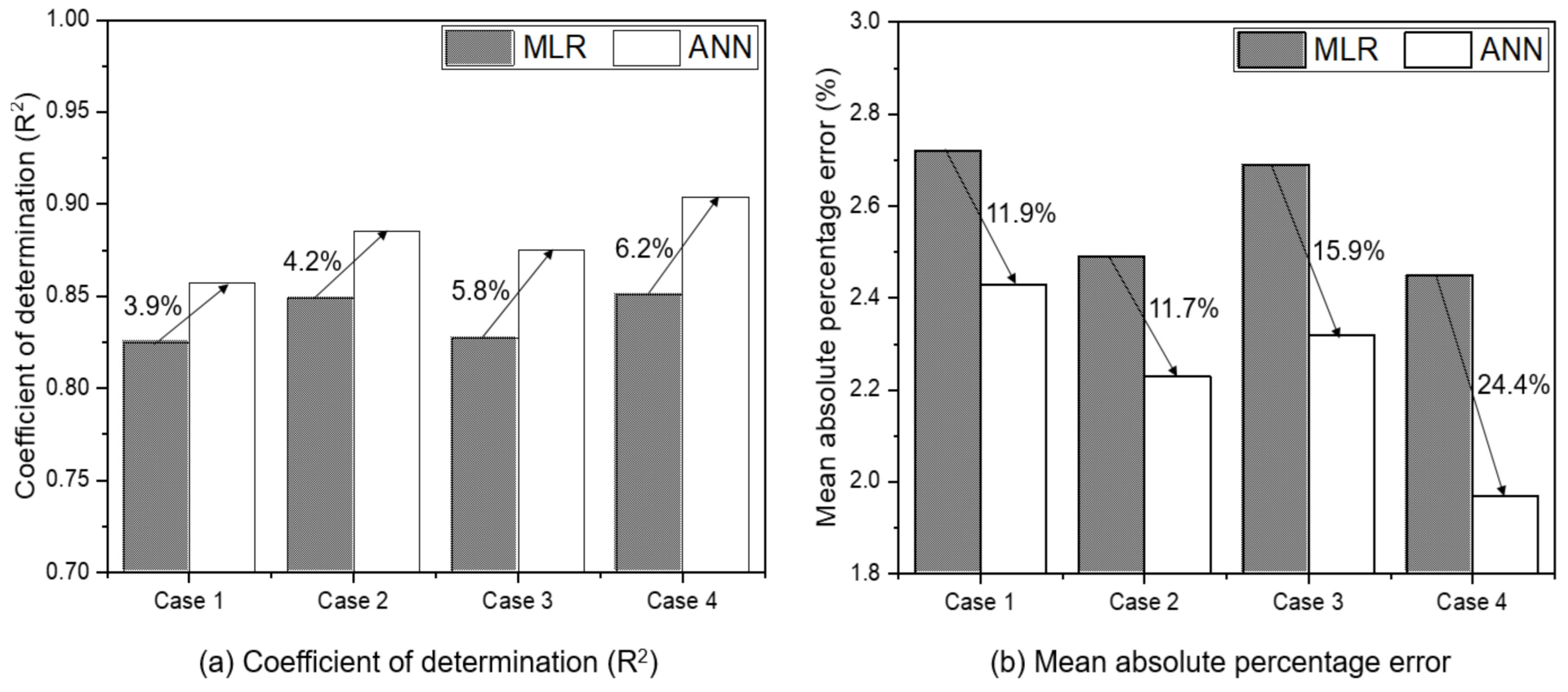
3.5. Comparison of Axle Torque Estimation Model by MLR and ANN
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mattetti, M.; Maraldi, M.; Sedoni, E.; Molari, G. Optimal criteria for durability test of stepped transmissions of agricultural tractors. Biosyst. Eng. 2019, 178, 145–155. [Google Scholar] [CrossRef]
- Baek, S.M.; Kim, W.S.; Kim, Y.S.; Baek, S.Y.; Kim, Y.J. Design of the Hydro-Mechanical Transmission for a 55kW-Class Agricultural Tractor. J. Drive Control 2020, 17, 19–27. [Google Scholar]
- Kim, T.J.; Kim, W.S.; Kim, Y.S.; Chung, S.O.; Park, S.U.; Hong, S.J.; Choi, C.H.; Kim, Y.J. Strength analysis of mechanical transmission using equivalent torque of plow tillage of an 82 kW-class tractor. Korean J. Agric. Sci. 2019, 46, 723–735. [Google Scholar]
- Baek, S.M.; Kim, W.S.; Kim, Y.S.; Lee, N.G.; Kim, N.-h.; Kim, Y.J. Analysis of the load distribution and contact safety factor of PTO gears of a 71 kW class agricultural tractor. Korean J. Agric. Sci. 2020, 47, 327–335. [Google Scholar]
- Kim, W.S.; Kim, Y.S.; Kim, Y.J. Development of prediction model for axle torque of agricultural tractors. Trans. ASABE 2020, 63, 1773–1786. [Google Scholar] [CrossRef]
- Bai, J.; Wu, X.; Gao, F.; Li, H. Analysis of powertrain loading dynamic characteristics and the effects on fatigue damage. Appl. Sci. 2017, 7, 1027. [Google Scholar] [CrossRef]
- Pitla, S.K.; Luck, J.D.; Werner, J.; Lin, N.; Shearer, S.A. In-field fuel use and load states of agricultural field machinery. Comput. Electron. Agric. 2016, 121, 290–300. [Google Scholar] [CrossRef]
- Kim, W.S.; Baek, S.Y.; Kim, T.J.; Kim, Y.S.; Park, S.U.; Choi, C.H.; Hong, S.J.; Kim, Y.J. Work load analysis for determination of the reduction gear ratio for a 78 kW all wheel drive electric tractor design. Korean J. Agric. Sci. 2019, 46, 613–627. [Google Scholar]
- Abbaspour-Gilandeh, Y.; Fazeli, M.; Roshanianfard, A.; Hernández-Hernández, M.; Gallardo-Bernal, I.; Hernández-Hernández, J.L. Prediction of draft force of a chisel cultivator using artificial neural networks and its comparison with regression model. Agronomy 2020, 10, 451. [Google Scholar]
- Kumar, A.A.; Tewari, V.K.; Nare, B.; Chetan, C.R.; Srivastava, P.; Prakash Kumar, S. Embedded digital drive wheel torque indicator for agricultural 2WD tractors. Comput. Electron. Agric. 2017, 139, 91–102. [Google Scholar] [CrossRef]
- Kim, W.S.; Kim, Y.J.; Baek, S.Y.; Baek, S.M.; Kim, Y.S.; Park, S.U. Development of a prediction model for tractor axle torque during tillage operation. Appl. Sci. 2020, 10, 4195. [Google Scholar] [CrossRef]
- Basak, J.K.; Qasim, W.; Okyere, F.G.; Khan, F.; Lee, Y.J.; Park, J.; Kim, H.T. Regression analysis to estimate morphology parameters of pepper plant in a controlled greenhouse system. J. Biosyst. Eng. 2019, 44, 57–68. [Google Scholar] [CrossRef]
- Lee, D.H.; Lee, S.H.; Cho, B.K.; Wakholi, C.; Seo, Y.W.; Cho, S.H.; Kang, T.H.; Lee, W.H. Estimation of carcass weight of hanwoo (Korean native cattle) as a function of body measurements using statistical models and a neural network. Asian-Australas. J. Anim. Sci. 2020, 33, 1633–1641. [Google Scholar] [CrossRef]
- Kim, W.S.; Kim, Y.J.; Baek, S.M.; Baek, S.Y.; Moon, S.P.; Lee, N.G.; Kim, T.J.; Siddique, M.A.A.; Jeon, H.h.; Kim, Y.S. Effect of the Cone Index on the Work Load of the Agricultural Tractor. J. Drive Control 2020, 17, 9–18. [Google Scholar]
- Kim, Y.S.; Kim, W.S.; Baek, S.Y.; Baek, S.M.; Kim, Y.J.; Lee, S.D.; Kim, Y.J. Analysis of tillage depth and gear selection for mechanical load and fuel efficiency of an agricultural tractor using an agricultural field measuring system. Sensors 2020, 20, 2450. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.S.; Kim, Y.J.; Baek, S.Y.; Baek, S.M.; Kim, Y.S.; Choi, Y.; Kim, Y.K.; Choi, I.S. Traction performance evaluation of a 78-kW-class agricultural tractor using cone index map in a Korean paddy field. J. Terramechanics 2020, 91, 285–296. [Google Scholar] [CrossRef]
- Kim, W.S.; Kim, Y.J.; Park, S.U.; Kim, Y.S. Influence of soil moisture content on the traction performance of a 78-kW agricultural tractor during plow tillage. Soil Tillage Res. 2020, 207, 104851. [Google Scholar]
- Upadhyay, G.; Raheman, H. Performance of combined offset disc harrow (front active and rear passive set configuration) in soil bin. J. Terramechanics 2018, 78, 27–37. [Google Scholar] [CrossRef]
- Mason, G.L.; Williams, J.M.; Vahedifard, F.; Priddy, J.D. A unified equation for predicting traction for wheels on sand over a range of braked, towed, and powered operations. J. Terramechanics 2018, 79, 33–40. [Google Scholar] [CrossRef]
- Okyere, F.G.; Qasim, W.; Basak, J.K.; Khan, F.; Lee, Y.J.; Park, J.; Arulmozhi, E.; Yoon, Y.C.; Kang, D.S.; Kim, H.T. Analysis of draft force requirement of a compact disc harrow and model development for future predictions. J. Biosyst. Eng. 2019, 44, 47–56. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Sabzi, S.; Benmouna, B.; García-Mateos, G.; Hernández-Hernández, J.L.; Molina-Martínez, J.M. Estimation of the constituent properties of red delicious apples using a hybrid of artificial neural networks and artificial bee colony algorithm. Agronomy 2020, 10, 267. [Google Scholar] [CrossRef]
- Bietresato, M.; Calcante, A.; Mazzetto, F. A neural network approach for indirectly estimating farm tractors engine performances. Fuel 2015, 143, 144–154. [Google Scholar] [CrossRef]
- Rajabi-Vandechali, M.; Abbaspour-Fard, M.H.; Rohani, A. Development of a prediction model for estimating tractor engine torque based on soft computing and low cost sensors. Measurement 2018, 121, 83–95. [Google Scholar] [CrossRef]
- American Society of Agricultural and Biological Engineers. S313.3. Soil Cone Penetrometer; ASABE: St. Joseph, MI, USA, 2013. [Google Scholar]
- American Society of Agricultural and Biological Engineers. EP542.1 Procedures for Using and Reporting Data Obtained with the Soil Cone Penetrometer; ASABE: St. Joseph, MI, USA, 2019. [Google Scholar]
- Baek, S.Y.; Kim, W.S.; Kim, Y.S.; Kim, Y.J.; Park, C.G.; An, S.C.; Moon, H.C.; Kim, B.S. Development of a simulation model for an 80 kW-class electric all-wheel-drive (AWD) tractor using agricultural workload. J. Drive Control 2020, 17, 27–36. [Google Scholar]
- Liao, J.; Hewitt, A.J.; Wang, P.; Luo, X.; Zang, Y.; Zhou, Z.; Lan, Y.; O’donnell, C. Development of droplet characteristics prediction models for air induction nozzles based on wind tunnel tests. Int. J. Agric. Biol. Eng. 2019, 12, 1–6. [Google Scholar] [CrossRef]
- Moon, S.; Ahmadnezhad, P.; Song, H.-J.; Thompson, J.; Kipp, K.; Akinwuntan, A.E.; Devos, H. Artificial neural networks in neurorehabilitation: A scoping review. NeuroRehabilitation 2020, 46, 259–269. [Google Scholar] [CrossRef]
- Kim, K.U. Soil-Machine Systems Engineerings; Seoul National University Press: Seoul, Korea, 2020. [Google Scholar]
- Niedbała, G.; Piekutowska, M.; Weres, J.; Korzeniewicz, R.; Witaszek, K.; Adamski, M.; Pilarski, K.; Czechowska-Kosacka, A.; Krysztofiak-Kaniewska, A. Application of artificial neural networks for yield modeling of winter rapeseed based on combined quantitative and qualitative data. Agronomy 2019, 9, 781. [Google Scholar] [CrossRef]
- Tkachenko, R.; Izonin, I.; Vitynskyi, P.; Lotoshynska, N.; Pavlyuk, O. Development of the non-iterative supervised learning predictor based on the ito decomposition and sgtm neural-like structure for managing medical insurance costs. Data 2018, 3, 46. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specifications | |
|---|---|---|
| Dimension | 4225 × 2140 × 2830 mm | |
| Weight | Empty | 39,093 N |
| Total | 51,071 N | |
| Engine | Rated torque | 324 Nm @ 2300 rpm |
| Maximum torque | 430 Nm @ 1400 rpm | |
| Transmission | Type | Power Shuttle |
| Number of gear stages | 32 Forward/32 Reverse | |
| Parameters | Max. | Min. | Median | Avg. ± SD | CV (%) |
|---|---|---|---|---|---|
| Soil moisture content (%) | 45 | 27 | 34 | 43 ± 3 | 9.4 |
| Cone index (kPa) | 2620 | 422 | 1270 | 1322 ± 384 | 29.0 |
| Engine torque (Nm) | 351 | 274 | 316 | 315 ± 15 | 4.7 |
| Engine speed (rpm) | 2387 | 2079 | 2308 | 2301 ± 55 | 2.4 |
| Specific fuel consumption (g·kWh −1) | 234 | 213 | 223 | 224 ± 4 | 1.8 |
| Tillage depth (cm) | 21.0 | 9.9 | 15.4 | 15.4 ± 2.1 | 13.8 |
| Travel speed (km·h −1) | 6.65 | 5.11 | 6.11 | 6.09 ± 0.3 | 4.9 |
| Slip ratio (%) | 20.0 | 9.3 | 14.0 | 14.0 ± 2.3 | 16.4 |
| Axle torque (Nm) | 8180 | 5449 | 6741 | 6712 ± 532 | 7.9 |
| Axle speed (rpm) | 25.3 | 22.0 | 24.5 | 24.4 ± 0.6 | 2.4 |
| Parameters | R2 | MAPE (%) | RMSE (Nm) | RD (%) |
|---|---|---|---|---|
| ET + ES + SFC | 0.825 | 2.72 | 223 | 3.33 |
| ET + ES + SFC + TS + TD + SR | 0.849 | 2.49 | 207 | 3.09 |
| ET + ES + SFC + SMC + CI | 0.827 | 2.69 | 222 | 3.31 |
| ET + ES + SFC + TS + TD + SR + SMC + CI | 0.851 | 2.45 | 206 | 3.07 |
| Parameters | R2 | MAPE (%) | RMSE (Nm) | RD (%) |
|---|---|---|---|---|
| ET + ES + SFC | 0.751 | 2.73 | 268 | 3.99 |
| ET + ES + SFC + TS + TD + SR | 0.772 | 2.61 | 256 | 3.82 |
| ET + ES + SFC + SMC + CI | 0.758 | 2.67 | 264 | 3.93 |
| ET + ES + SFC + TS + TD + SR + SMC + CI | 0.775 | 2.58 | 255 | 3.80 |
| Parameters | R2 | MAPE (%) | RMSE (Nm) | RD (%) |
|---|---|---|---|---|
| ET + ES + SFC | 0.857 | 2.43 | 205 | 3.05 |
| ET + ES + SFC + TS + TD + SR | 0.885 | 2.23 | 189 | 2.82 |
| ET + ES + SFC + SMC + CI | 0.875 | 2.32 | 194 | 2.89 |
| ET + ES + SFC + TS + TD + SR + SMC + CI | 0.904 | 1.97 | 170 | 2.54 |
| Parameters | R2 | MAPE (%) | RMSE (Nm) | RD (%) |
|---|---|---|---|---|
| ET + ES + SFC | 0.841 | 2.36 | 215 | 3.21 |
| ET + ES + SFC + TS + TD + SR | 0.870 | 2.25 | 192 | 2.87 |
| ET + ES + SFC + SMC + CI | 0.821 | 2.53 | 224 | 3.35 |
| ET + ES + SFC + TS + TD + SR + SMC + CI | 0.847 | 2.48 | 207 | 3.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W.-S.; Lee, D.-H.; Kim, Y.-J.; Kim, Y.-S.; Park, S.-U. Estimation of Axle Torque for an Agricultural Tractor Using an Artificial Neural Network. Sensors 2021, 21, 1989. https://doi.org/10.3390/s21061989
Kim W-S, Lee D-H, Kim Y-J, Kim Y-S, Park S-U. Estimation of Axle Torque for an Agricultural Tractor Using an Artificial Neural Network. Sensors. 2021; 21(6):1989. https://doi.org/10.3390/s21061989
Chicago/Turabian StyleKim, Wan-Soo, Dae-Hyun Lee, Yong-Joo Kim, Yeon-Soo Kim, and Seong-Un Park. 2021. "Estimation of Axle Torque for an Agricultural Tractor Using an Artificial Neural Network" Sensors 21, no. 6: 1989. https://doi.org/10.3390/s21061989
APA StyleKim, W.-S., Lee, D.-H., Kim, Y.-J., Kim, Y.-S., & Park, S.-U. (2021). Estimation of Axle Torque for an Agricultural Tractor Using an Artificial Neural Network. Sensors, 21(6), 1989. https://doi.org/10.3390/s21061989