Abstract
This paper considers the two-dimensional (2D) anchorless localization problem for sensor networks in global positioning system (GPS)-denied environments. We present an efficient method, based on the multidimensional scaling (MDS) algorithm, in order to estimate the positions of the nodes in the network using measurements of the inter-node distances. The proposed method takes advantage of the mobility of the nodes to address the location ambiguity problem, i.e., rotation and flip ambiguity, which arises in the anchorless MDS algorithm. Knowledge of the displacement of the moving node is used to produce an analytical solution for the noise-free case. Subsequently, a least squares estimator is presented for the noisy scenario and the associated closed-form solution derived. The simulations show that the proposed algorithm accurately and efficiently estimates the locations of nodes, outperforming alternative methods.
1. Introduction
Because of the increased availability of low-cost low-power sensors, smart sensors, and multi-functional sensors, wireless sensor networks are becoming increasingly ubiquitous [1,2,3,4]. Wireless sensor networks are being utilized in a diverse array of tracking and monitoring applications from environmental [5] and health monitoring [6] to traffic [7] and border surveillance [8]. In many of these applications, the nodes in the network are mobile and knowledge of their positions is a prerequisite for completing the task, and crucial for information sharing, data collection, and scheduling [9]. For example, if the locations of the nodes are unknown or significantly incorrect, the data they have collected from surrounding environment, such as wildlife [10] or weather information [11], will be useless, since the positional information is not available.
Localization algorithms estimate the locations of unknown nodes in the network using the positions of a known subset of the nodes to provide the required positional information. The most widely used localization techniques in the literature are distance-based localization algorithms, such as trilateration, radio interference positioning system (RIPS) [12], and the Hop-Distance algorithm [13]. These algorithms estimate the inter-node distances and require anchors, which is nodes with known locations, to provide the locations of the remaining nodes. The location of the anchor nodes is accessed via global positioning system (GPS) or a priori information [12,14,15,16,17,18].
While, GPS is widely used in locating unknown nodes in many situations, such as indoor, urban, and forest environments, the positions of nodes are difficult to obtain from GPS [19,20,21,22]. In this case, the anchors are absent or the positions of the anchors are not available, and the above algorithms cannot be applied. This is widely regarded as the most significant challenge in the positioning and navigation field [23,24,25]. Therefore, there is an increasing need for anchorless localization of sensor networks for use in GPS-denied or contested environments. Using the movement of nodes and the inter-node communication, cooperative localization can be leveraged in order to solve this problem. This scenario arises in the field of robotics swarms, especially in the navigation and formation control of unmanned aerial vehicles swarms under a GPS-denied environment [20,25,26,27].
In practice, cooperative localization can be achieved by utilizing the inter-node distances [28]. However, relative localization only gives node positions that satisfy the distance constraint, which means that there could be ambiguity problems, i.e., ambiguity due to rotation and/or flip [29]. The multidimensional scaling (MDS) algorithm is a widely used algorithm that is capable of tackling the anchorless localization problem [30,31,32,33,34,35]. The aim of MDS is to represent the similarity (or dissimilarity) of high dimensional data in a lower dimensional map which describes the relative distances between pairs of objects (in this case sensor nodes). Like other relative localization methods MDS can also be subject to the ambiguity problem; hence, algorithms have been proposed to attempt to address this problem. In [36] a MDS-based algorithm using moving nodes is presented, which constructs a cost function involving velocities and inter-node distances of all nodes at two consecutive time instants. In [37], a similar algorithm is proposed to solve the anchorless localization problem for nodes that can estimate the position via a nonlinear least square estimator; however, in this case, only one node is moving.
In this paper, we present an efficient algorithm for anchorless cooperative localization that is based on MDS. The algorithm mitigates the rotation and flip problems by taking advantage of the movement and inter-node communication of the mobile nodes. Unlike existing algorithms that operate in an iterative manner the proposed algorithm presents a closed-form solution that is computationally efficient. The algorithm is first derived in the noise-free case and the theoretical result is given. Subsrquently, the noisy case is considered and the associated closed-form estimator is presented. The proposed algorithm is supported by a rigorous theoretical derivation which provides optimal parameters. The simulation results support the theoretical analysis and indicate that the algorithm outperforms alternative methods.
This paper is organized, as follows: Section 2 introduces the background to the MDS algorithm and the associated ambiguity problem. The theoretical solution to the ambiguity problem is then presented in Section 3. Based on the theoretical analysis, Section 4 describes the impact of noise and introduces the proposed closed-form estimator for determining positions in noisy scenarios. Section 5 presents simulations for validating the proposed algorithm and, finally, Section 6 concludes the paper.
2. Multidimensional Scaling Algorithm
In this section, we briefly introduce the MDS algorithm and the ambiguity problem in an ideal scenario. As stated previously, the goal of MDS is to find a representation of the data that provides a low dimensional map (usually two or three dimensions) of the relative positions of the nodes based on their pairwise distances. If we consider the two-dimensional case where there are n nodes with their true coordinates denoted by where and . Afterwards, in the noise-free case the distance between nodes i and j, where and is given by . If we assume in the ideal scenario that the nodes are able to measure the true distances between each other so that the pairwise distance between two nodes with coordinates and is given by
and, furthermore, the squared distance can be written as
then we have the following symmetric Euclidean distance matrix:
If is the collection of all of the node coordinates and is the diagonal elements of , i.e.,
then we can rewrite as
where is the vector of ones of length n. Using the centering operation , then we have
where is the eigendecomposition of the symmetric matrix . Then we can recover (up to a translation and orthogonal transformation) via the following formula
MDS is an efficient algorithm for resolving the relative positions of the nodes [32]. However, as is apparent from the above analysis, in the absence of anchor nodes, MDS can only give relative positions of the nodes, which can include rotation and flip ambiguity. In other words, the result of MDS maintains the relative inter-node distances; however, these calculated locations of the nodes may be flipped and/or rotated versions of the true positions of the nodes. Obviously, when considering navigation of mobile nodes or formation control of the sensor network, incorrect positions of the nodes can lead to problems.
The Ambiguity Problem
In order to consider the ambiguity problem, we assume a set of n nodes in 2D Euclidean space. We fix a coordinate system, which, without a loss of generality, places the first node at the origin: . We recall that knowledge of the distances provides an ambiguity up to a universal Euclidean transformation of the nodes. This fixing of node 1 at the origin removes the shift from this Euclidean transformation. Accordingly, the solution of the MDS, , is replaced by subtracting from each column, so that, with some abuse of notation, , and the other become . Once the shift is removed, the remaining ambiguity devolves to a rotation and a reflection (flip). We give the definitions of rotation and flip ambiguities, as follows.
Definition 1
(Rotation ambiguity). If there exists an angle , such that
where is rotation matrix with angle θ and it is defined by [38]
then rotation ambiguity occurs.
Definition 2
(Flip ambiguity). Flip ambiguity occurs if
Remark 1.
The matrix can be defined equivalently by This definition can be obtained via simply rotating (6) by π. In the following analysis, we use the definition of as in Definition 2.
It can be seen that rotation ambiguity and flip ambiguity can occur simultaneously. If this is the case, then the true positions can be represented by
Figure 1 shows samples of these two ambiguities.
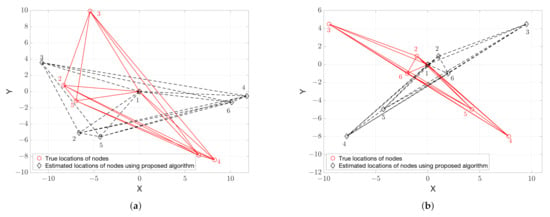
Figure 1.
Illustration of the positions of nodes calculated via multidimensional scaling (MDS), where red circles are the desired position (randomly generated) and black diamonds are the output of MDS. (a) rotation ambiguity only; and, (b) rotation and flip ambiguities.
3. Resolving Rotation and Flip Ambiguities
In this section, the rotation ambiguity is analyzed mathematically in the noise-free scenario and an analytical solution to the rotation and flip ambiguities presented.
3.1. Analysis of Rotation Ambiguity
Firstly, we assume that there only exists rotation ambiguity between and , no flip ambiguity. This means that based on the coordination rotation principle [38], can be rotated to using an unknown angle via (4). Hence, the true (unknown) locations of the nodes , for , can be obtained by rotating by , i.e.,
Therefore, we need to know to obtain the true locations of the nodes. In order to achieve this, we allow the lead node to move; this movement can then be utilized to obtain information that can be used to recover the locations of other nodes. Consider mobile nodes that are equipped with inertial navigation systems, the lead node can move with known displacement and orientation; that is, we let the lead node move to a known position, i.e., . Subsequently, the coordinates of all nodes after moving can be obtained as
where the i-th column of is given by
Accordingly, after moving the distance between the ith and jth nodes is
where is the ith column of . We can then update the distance matrix (2) with the entries to give
where, by considering and for ,
Substituting (9) and (12) into the distance matrix (11) we have
giving
where is a zero matrix with dimensions . This equation describes the relationship between both the locations and distance matrices pre and post the lead node moving; this information can be used to obtain the angle of rotation . If we break the analysis of (13) into three parts, then we have the following:
Equation (19) is equivalent to the following system of equations:
3.2. Analysis of Rotation and Flip Ambiguities
Having obtained a unique solution to the rotation angle when only rotation ambiguity is present, in this section we present an analytical solution that is based on the analysis in Section 3.1 for when rotation and flip ambiguities occur simultaneously. The key idea behind this method is again to use the mobility of the lead node to acquire extra information in order to detect the flip of the initial MDS localization result.
Firstly, we assume that there exist three non-collinear nodes in order to be able to detect flip ambiguity. Next, we note that the ith equation in (24) has the following solutions and :
where is the 2-argument arctangent. Therefore, the solution to (26), which is common to all values of i, is the unique solution to (24). It can also be shown that given in (26) can be rewritten and rearranged into a concise form
where and the function can wrap any arbitrary angle t in radians into range . Appendix A provides the full derivation of these equations.
The angles in (27) represent the angles between vectors and for , as shown in Figure 2, and play an important role in the ability to detect flip ambiguity. When there is only rotation ambiguity, because of the uniqueness of solution of (24), we have , , as shown in the previous section. Whereas, the angles in (28) are the summation of and the angle induced by and . Obviously, if there exist three non-collinear nodes, , and and, therefore, from (28) we have , . In contrast, it can be shown that flip ambiguity exists if and only if , and . In order to illustrate why this is the case, we give the counter example, assuming without loss of generality, that , and flip ambiguity exists. implies that , , can be rotated simultaneously to the true positions via either or , as shown in Figure 2a. Hence, this contradicts the assumption of the existence of flip ambiguity.
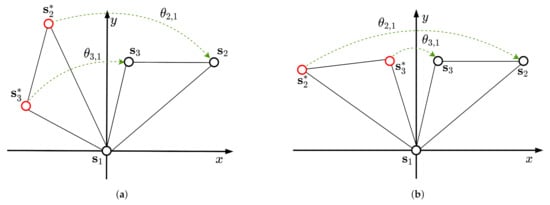
Figure 2.
Illustration of angle given in (27) using three nodes with true locations and solved ambiguous locations . (a) rotation ambiguity and ; (b) flip ambiguity and .
Furthermore, extending to the case where , still assuming that and flip ambiguity exists. We know that, for , can be simultaneously rotated to the true positions via (or ). Because there exist three non-collinear nodes, then three nodes with correct positions are sufficient for guaranteeing the localization of the whole network [39]. In this case, , and can be found exactly from (or ). Therefore, , for , must be solvable via rotating by angle (or ) and, as a result, . This again contradicts the assumption of existence of flip ambiguity. On the other hand, if , and , then it is obvious that there exists flip ambiguity, since cannot be rotated to simultaneously. As a conclusion, there exists flip ambiguity if and only if , and .
In what follows, we assume that there exist three non-collinear nodes and, based on the above analysis, we make the following conclusion:
Although we cannot use (27)–(29) directly to determine the existence of flip as they contain unknown true positions, those results are crucial in deriving the estimator for locations in noisy scenario.
In reality, the solution to (24) is computed using , and . We denote this unique solution by . The same notation is used to denote a rotation angle that is calculated with different variables, nonetheless, whatever the variables used, the method is the same as described above. If we denote the positions that are calculated using the rotation angle as we have the following result
If the lead node then moves to a second position giving a matrix formed by true positions , where
After obtaining a new distance matrix at position , we can solve . If , then there is no flip ambiguity and the true positions are ; otherwise, we move to the process of resolving the flip ambiguity. For this, according to Definition 2, all the values in along the axis are required to be flipped to obtain . Subsequently, we only need to calculate the rotation angle using . It should be noted that, since and are fixed, it is unnecessary to take any new measurements and the true position can be resolved by
4. Proposed Algorithm Robust to Ambiguity and Noise
The analysis in the previous section assumes ideal measurements; however, in practice, the measurements are corrupted by noise that can have a significant impact on the localization performance. If we consider the distances between two nodes, in the noise-free case the distance between the ith and jth nodes is the same regardless of which node it is measured from, i.e., . When noise is introduced, this is no longer the case, if we denote the measured distances as and , then resulting in uncertainty in our estimates of the distances. In general, the measured distance between the ith and jth nodes can be modeled by
where is the true distance and is the measurement noise.
Accordingly, the noisy Euclidean distance matrix (EDM) can be written into
As we know that when the noise is absent, therefore, in order to obtain a symmetric EDM in noisy case, we can use
where is an estimator for the distance between i-th and j-th nodes using and . In practice, this estimator is designed by using the knowledge of noise distribution. For example, when the noise in and are assumed to comprise independent and identically distributed (i.i.d.) normal distributions, then we have [40]. Because the study of the estimator and estimation of the EDM is outside the scope of this article, we refer the interested reader to [40,41] for more information, including completing and estimating an EDM.
Accordingly, the estimated symmetric EDM can be obtained while using . Similarly, we can obtain by using the new position of , as described in (10).
In (24), in the noise-free case, the solution is unique and easy to find. However, in the noisy environment, the theoretical unique solution to (24) is not guaranteed. Therefore, a key issue in estimating is to find a value that satisfies a certain objective, i.e.,
where is an objective function of given , , and . In general, the least square estimator provides a good choice of objective function, as it is a well defined computationally efficient estimator. The objective function based on the least square estimator is given by
Solutions to (37) can be obtained by taking the derivative of the objective function with respect to and equating to zero, from this we obtain a quartic equation (see Appendix B for details), which has, at most, four real roots giving the corresponding collection of angles as
where , , and m is the number of solutions, such that . Subsequently, (37) becomes
and, accordingly, by (30)
In order to detect flip ambiguity, we can follow the same method, as described in Section 3, i.e., let the lead node move to another position and solve via (38) while using the estimated distance matrix obtained at the new position . However, becasue of the presence of noise is not necessarily equal to 0 when there is no flip ambiguity. To handle this, we need to create a detector for the flip. For this, we use a straightforward threshold detector:
The following proposition, the proof of which is given in Appendix C, allows for us to efficiently find an optimal threshold in (40).
Proposition 1.
Under the noise-free case, if there exists flip ambiguity, then
where .
From Proposition 1, under the noise-free case, we know the value of when a flip occurs; therefore, in the noisy case, the optimal threshold is
As a conclusion, the positions of nodes can estimated using the following formula:
Algorithm 1 summarizes the algorithm to estimate locations of nodes with noisy measurements.
| Algorithm 1: Algorithm to estimate locations of mobile nodes. |
 |
5. Simulations
Networks with randomly generated nodes were used to test the performance of the proposed algorithm. In all of the following simulations the position of the first node is fixed to and the positions of the other nodes are uniformly generated within .
To validate the proposed approach that can address the ambiguity problem, we use the same noise-free scenarios as given in Figure 1 the results of which are shown in Figure 3. Unlike the results that are obtained from the MDS alone, as shown in Figure 1, when we compare the locations of the true and estimated nodes in Figure 3, we can see that, while using the method that is presented in Section 3, the rotation and flip ambiguities are solved correctly and, therefore, the positions of the nodes are successfully recovered.
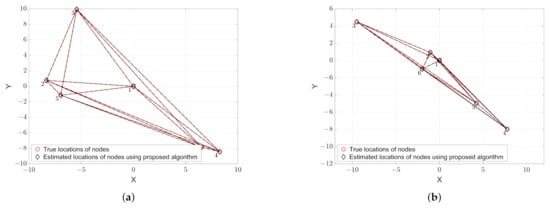
Figure 3.
Estimation of the positions of nodes in noise-free scenarios. (a) Rotation only; and (b) Rotation and flip.
Next, we consider the noisy scenario, as discussed in Section 4, in the noisy scenario the detection of whether flip has occurred is no longer straightforward and requires an appropriate choice of threshold. Firstly, to demonstrate the ability of the proposed algorithm to detect flip or no flip states, we tested two different network configurations: one with the number of nodes and the other with . The noise is assumed to be Gaussian distributed with mean 0 and standard deviation, , of . For each of the configurations, the outcomes of 50 simulations are shown in Figure 4. The results show that the proposed algorithm can correctly detect flip ambiguity in the noisy scenario.
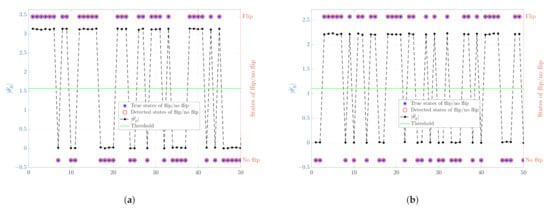
Figure 4.
An illustration of the detection of flip/no flip states and the corresponding values of . The left y-axes represent the values of and the threshold while the right y-axes show the true and detected states of flip/no flip with . (a) The number of nodes , and ; (b) The number of nodes , and .
Having established that the proposed algorithm can successfully deal with the ambiguity problem, we now consider the performance of the algorithm in terms of the accuracy of the localization. For the sake of simplicity, we define the noise level, standard variance of the noise, as , with chosen to range from 20 to 50 in steps of five and calculated accordingly. For each noise level, the Root-Mean-Square Error (RMSE) from 2000 simulations is used to evaluate the performance of the localization. The RMSE is defined by
where and are the true and estimated location of i-th, , node in j-th, , Monte Carlo simulation. It is assumed that is generated within region uniformly in each Monte Carlo simulation.
In order to provide a comparison with the proposed algorithm, we implemented the nonlinear least squares estimator (NLSE) that is presented in [37], solving the nonlinear least square problem using an optimization method. Additionally, the proposed algorithm essentially takes advantage of the mobility of the node to create virtual anchors for localizing the unknown nodes. As a result, the alignment method of relative locations proposed in [30,42] can be potentially applied in this scenario. As a comparison, the performance of this conventional method is also given.
From the simulation results that are shown in Figure 5, it can be seen that the proposed algorithm has better performance in terms of the RMSE for different noise levels and numbers of nodes than the NLS estimator with the conventional method. The localization error are arise from two effects: 1. MDS localization error; 2. mis-alignment error, i.e., the error from inaccurately aligning the positions. Additionally, it should also be noted that the algorithm proposed in this paper can simultaneously estimate the positions of all of the nodes, which cannot be achieved using the algorithm that was presented in [37]. As an indication of the computational efficiency of the proposed algorithm, our simulations indicate a ratio of required CPU time of the proposed algorithm relative to NLSE is Proposed algorithm:NLSE = 1:8.83.
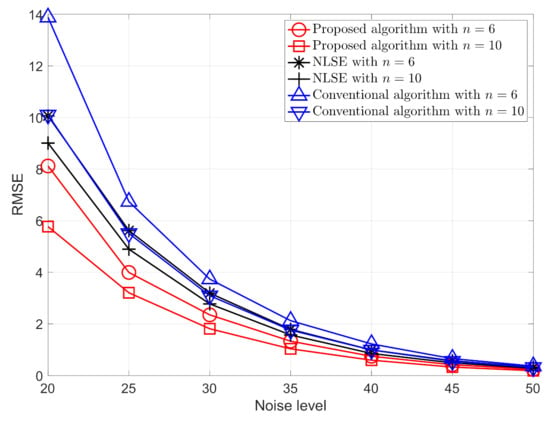
Figure 5.
The Root-Mean-Square Error (RMSE) for the proposed algorithm, the NLS estimator [37], NLSE, and conventional algorithm proposed in [30,42] for different numbers of nodes and different noise levels.
6. Conclusions
In this paper, we have presented an efficient cooperative localization algorithm that is based on MDS. The algorithm provides a practical solution for anchorless localization of mobile nodes using noisy measurements. Unlike traditional MDS algorithms, which suffer from an ambiguity problem, the algorithm that is presented here can solve the flip and rotation ambiguities and accurately estimate the positions of nodes in 2D space. The simulation results demonstrate the accuracy of the algorithm, showing that it outperforms alternative methods. At the same time, the proposed algorithm provides greater efficiency than alternative solutions that operate in an iterative manner by providing a closed-form solution. We point out that the main limitations of this algorithm are twofold. Firstly, as mentioned above, this algorithm has been developed in a 2D scenario, which limits its application in more complex situations. Although one may follow a similar procedure to derive the corresponding algorithm for a more general case, i.e., 3D space, this is non-trivial, as the geometry of the network has more degrees of freedom in the 3D space. Secondly, and in a similar vein to other algorithms, the algorithm proposed here requires inertial navigation to provide the displacement of the moving node. Consequently, a deeper analysis of the error that arises from the inertial navigation system should be taken into account in improving this algorithm. These issues will be addressed in future work.
Author Contributions
Conceptualization, W.L., A.K. and B.M.; Data curation, W.L.; Formal analysis, W.L.; Investigation, B.J. and B.M.; Methodology, W.L.; Project administration, A.K.; Software, W.L.; Supervision, A.K.; Validation, W.L., B.J. and B.M.; Visualization, W.L.; Writing–original draft, W.L.; Writing—review and editing, B.J., A.K., X.W. and B.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| The distance between nodes i and j | |
| Euclidean distance matrix given the collection of locations | |
| Rotation matrix for given angle | |
| True coordinates of the ith node | |
| Collection of the true locations of all of the nodes | |
| Output of multidimensional scaling given the distance matrix | |
| Rotation of the output of multidimensional scaling, , using rotation matrix with the angle, , obtained from the function | |
| Function to solve the possible rotation angle between the true positions and using the associated parameters | |
| The diagonal elements of |
The following notation is used to denote changes in the variables:
| The parameter after the first movement | |
| The parameter after the second movement | |
| The change in the parameter after the first movement | |
| The change in the parameter, relative to the original, after the second movement |
For example, is the collection of true locations of all of the nodes incorporating the changes in position, i.e., , similarly . It should be noted that can be re-formulated as with .
Appendix A
Proposition A1.
Function can wrap arbitrary angle t in radians into range and it satisfies following properties: P.1 ; and P.2 .
Lemma A1.
Let , then
From (A3) to (A4), the sign of is interpreted by ±, which implies that the values of and may be simply exchanged.
Furthermore,
and
Appendix B
Taking the derivative of with respect to , we have
where
If we let and . Then setting (A7) to 0 leads to:
References
- Ramson, S.R.J.; Moni, D.J. Applications of Wireless Sensor Networks—A Survey. In Proceedings of the International Conference on Innovations in Electrical, Electronics, Instrumentation and Media Technology (ICEEIMT), Coimbatore, India, 3–4 February 2017; pp. 325–329. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless Sensor Network Survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless Sensor Network Localization Techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Chong, C.Y.; Kumar, S. Sensor Networks: Evolution, Opportunities, and Challenges. Proc. IEEE 2003, 91, 1247–1256. [Google Scholar] [CrossRef]
- Lombardo, L.; Corbellini, S.; Parvis, M.; Elsayed, A.; Angelini, E.; Grassini, S. Wireless Sensor Network for Distributed Environmental Monitoring. IEEE Trans. Instrum. Meas. 2018, 67, 1214–1222. [Google Scholar] [CrossRef]
- Alemdar, H.; Ersoy, C. Wireless Sensor Networks for Healthcare: A Survey. Comput. Netw. 2010, 54, 2688–2710. [Google Scholar] [CrossRef]
- Kafi, M.A.; Challal, Y.; Djenouri, D.; Doudou, M.; Bouabdallah, A.; Badache, N. A Study of Wireless Sensor Networks for Urban Traffic Monitoring: Applications and Architectures. Procedia Comput. Sci. 2013, 19, 617–626. [Google Scholar] [CrossRef]
- Hammoudeh, M.; Al-Fayez, F.; Lloyd, H.; Newman, R.; Adebisi, B.; Bounceur, A.; Abuarqoub, A. A Wireless Sensor Network Border Monitoring System: Deployment Issues and Routing Protocols. IEEE Sens. J. 2017, 17, 2572–2582. [Google Scholar] [CrossRef]
- Moran, B.; Suvorova, S.; Howard, S. Sensor Management for Radar: A Tutorial. In Advances in Sensing with Security Applications; NATO Security Through Science Series; Byrnes, J., Ostheimer, G., Eds.; Springer: Dordrecht, The Netherlands, 2006; Volume 2, pp. 269–291. [Google Scholar]
- Garcia-Sanchez, A.J.; Garcia-Sanchez, F.; Losilla, F.; Kulakowski, P.; Garcia-Haro, J.; Rodríguez, A.; López-Bao, J.V.; Palomares, F. Wireless Sensor Network Deployment for Monitoring Wildlife Passages. Sensors 2010, 10, 7236–7262. [Google Scholar] [CrossRef]
- Abdullah, S.; Bertalan, S.; Masar, S.; Coskun, A.; Kale, I. A Wireless Sensor Network for Early Forest Fire Detection and Monitoring as a Decision Factor in the Context of a Complex Integrated Emergency Response System. In Proceedings of the IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Milan, Italy, 24–25 July 2017. [Google Scholar]
- Maróti, M.; Völgyesi, P.; Dóra, S.; Kusý, B.; Nádas, A.; Lédeczi, Á.; Balogh, G.; Molnár, K. Radio Interferometric Geolocation. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems (SenSys); ACM Press: New York, NY, USA, 2005. [Google Scholar]
- Nath, S.; Ekambaram, V.N.; Kumar, A.; Kumar, P.V. Theory and Algorithms for Hop-Count-Based Localization with Random Geometric Graph Models of Dense Sensor Networks. ACM Trans. Sens. Netw. 2012, 8, 1–38. [Google Scholar] [CrossRef]
- Wang, X.; Moran, B.; Brazil, M. Hyperbolic Positioning Using RIPS Measurements for Wireless Sensor Networks. In Proceedings of the 15th IEEE International Conference on Networks, Adelaide, Australia, 19–21 November 2007; pp. 425–430. [Google Scholar]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative Localization in Wireless Networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Yaghoubi, F.; Abbasfar, A.A.; Maham, B. Energy-Efficient RSSI-Based Localization for Wireless Sensor Networks. IEEE Commun. Lett. 2014, 18, 973–976. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. RSS-Based Localization in Wireless Sensor Networks Using Convex Relaxation: Noncooperative and Cooperative Schemes. IEEE Trans. Veh. Technol. 2015, 64, 2037–2050. [Google Scholar] [CrossRef]
- Goel, S.; Kealy, A.; Lohani, B. Cooperative UAS Localization Using Lowcost Sensors. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, III, 183–190. [Google Scholar] [CrossRef]
- Ahrens, S.; Levine, D.; Andrews, G.; How, J.P. Vision-Based Guidance and Control of a Hovering Vehicle in Unknown, GPS-Denied Environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2643–2648. [Google Scholar]
- Bachrach, A.; Prentice, S.; He, R.; Roy, N. RANGE-Robust autonomous navigation in GPS-denied environments. J. Field Robot. 2011, 28, 644–666. [Google Scholar] [CrossRef]
- Zhang, L.; Ye, M.; Anderson, B.D.; Sarunic, P.; Hmam, H. Cooperative localisation of UAVs in a GPS-denied environment using bearing measurements. In Proceedings of the IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 4320–4326. [Google Scholar]
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. Survey on UAV navigation in GPS denied environments. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Odisha, India, 3–4 October 2016; pp. 198–204. [Google Scholar]
- de Paula Veronese, L.; Cheein, F.A.; Bastos-Filho, T.; Souza, A.F.D.; de Aguiar, E. A Computational Geometry Approach for Localization and Tracking in GPS-denied Environments. J. Field Robot. 2015, 33, 946–966. [Google Scholar] [CrossRef]
- Schnipke, E.; Reidling, S.; Meiring, J.; Jeffers, W.; Hashemi, M.; Tan, R.; Nemati, A.; Kumar, M. Autonomous Navigation of UAV through GPS-Denied Indoor Environment with Obstacles. In Proceedings of the AIAA Infotech @ Aerospace, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Russell, J.S.; Ye, M.; Anderson, B.D.; Hmam, H.; Sarunic, P. Cooperative Localisation of a GPS-Denied UAV in 3-Dimensional Space Using Direction of Arrival Measurements. IFAC PapersOnLine 2017, 50, 8019–8024. [Google Scholar] [CrossRef]
- Singh, S.; Sujit, P. Landmarks based path planning for UAVs in GPS-denied areas. IFAC PapersOnLine 2016, 49, 396–400. [Google Scholar] [CrossRef]
- Power, W.; Pavlovski, M.; Saranovic, D.; Stojkovic, I.; Obradovic, Z. Autonomous Navigation for Drone Swarms in GPS-Denied Environments Using Structured Learning. In Artificial Intelligence Applications and Innovations; Springer International Publishing: Cham, Switzerland, 2020; pp. 219–231. [Google Scholar]
- Cao, M.; Anderson, B.D.O.; Morse, A.S. Sensor Network Localization with Imprecise Distances. Syst. Control Lett. 2006, 55, 887–893. [Google Scholar] [CrossRef]
- Beck, B.; Baxley, R. Anchor Free Node Tracking Using Ranges, Odometry, and Multidimensional Scaling. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014. [Google Scholar]
- Ji, X.; Zha, H. Sensor Positioning in Wireless Ad-Hoc Sensor Networks Using Multidimensional Scaling. In Proceedings of the IEEE INFOCOM 2004, Hong Kong, China, 7–11 March 2004; Volume 4, pp. 2652–2661. [Google Scholar]
- Borg, I.; Groenen, P.J.F. Modern Multidimensional Scaling; Springer: New York, NY, USA, 2005. [Google Scholar]
- Costa, J.A.; Patwari, N.; Hero, A.O. Distributed Weighted-Multidimensional Scaling for Node Localization in Sensor Networks. ACM Trans. Sens. Netw. 2006, 2, 39–64. [Google Scholar] [CrossRef]
- Rajan, R.T.; van der Veen, A.J. Joint Ranging and Synchronization for an Anchorless Network of Mobile Nodes. IEEE Trans. Signal Process. 2015, 63, 1925–1940. [Google Scholar] [CrossRef]
- Wei, M.; Aragues, R.; Sagues, C.; Calafiore, G.C. Noisy Range Network Localization Based on Distributed Multidimensional Scaling. IEEE Sens. J. 2015, 15, 1872–1883. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef]
- Di Franco, C.; Melani, A.; Marinoni, M. Solving Ambiguities in MDS Relative Localization. In Proceedings of the International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 230–236. [Google Scholar]
- Guo, K.; Qiu, Z.; Meng, W.; Xie, L.; Teo, R. Ultra-wideband based cooperative relative localization algorithm and experiments for multiple unmanned aerial vehicles in GPS denied environments. Int. J. Micro Air Veh. 2017, 9, 169–186. [Google Scholar] [CrossRef]
- Arfken, G.B.; Weber, H.J.; Harris, F.E. Mathematical Methods for Physicists, 7th ed.; Elsevier: Boston, MA, USA, 2013. [Google Scholar]
- Anderson, B.D.O.; Shames, I.; Mao, G.; Fidan, B. Formal Theory of Noisy Sensor Network Localization. SIAM J. Discret. Math. 2010, 24, 684–698. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Lei, H. Localization From Incomplete Euclidean Distance Matrix: Performance Analysis for the SVD–MDS Approach. IEEE Trans. Signal Process. 2019, 67, 2196–2209. [Google Scholar] [CrossRef]
- Dokmanic, I.; Parhizkar, R.; Ranieri, J.; Vetterli, M. Euclidean Distance Matrices: Essential theory, algorithms, and applications. IEEE Signal Process. Mag. 2015, 32, 12–30. [Google Scholar] [CrossRef]
- Di Franco, C.; Bini, E.; Marinoni, M.; Buttazzo, G.C. Multidimensional Scaling Localization with Anchors. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2017; pp. 49–54. [Google Scholar]
- Strobach, P. The Fast Quartic Solver. J. Comput. Appl. Math. 2010, 234, 3007–3024. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).