
Low-Cost Control and Measurement Circuit for the Implementation of Single Element Heat Dissipation Soil Water Matric Potential Sensor Based on a SnSe2 Thermosensitive Resistor

 ,
,  , , , ,
, , , ,  , and
, and
Abstract
1. Introduction
1.1. DHPP Sensors
1.2. Conventional SHPP Sensors
1.3. Sensors Encapsulated in Porous Blocks
1.4. Single-Element SHPP Sensors
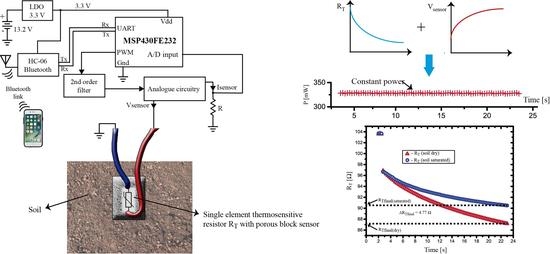
2. Principle of Operation of a SHPP Sensor
3. Temperature Sensor Using Thermosensitive Resistors
Thermosensitive Resistor Based on Nanocrystalized Materials
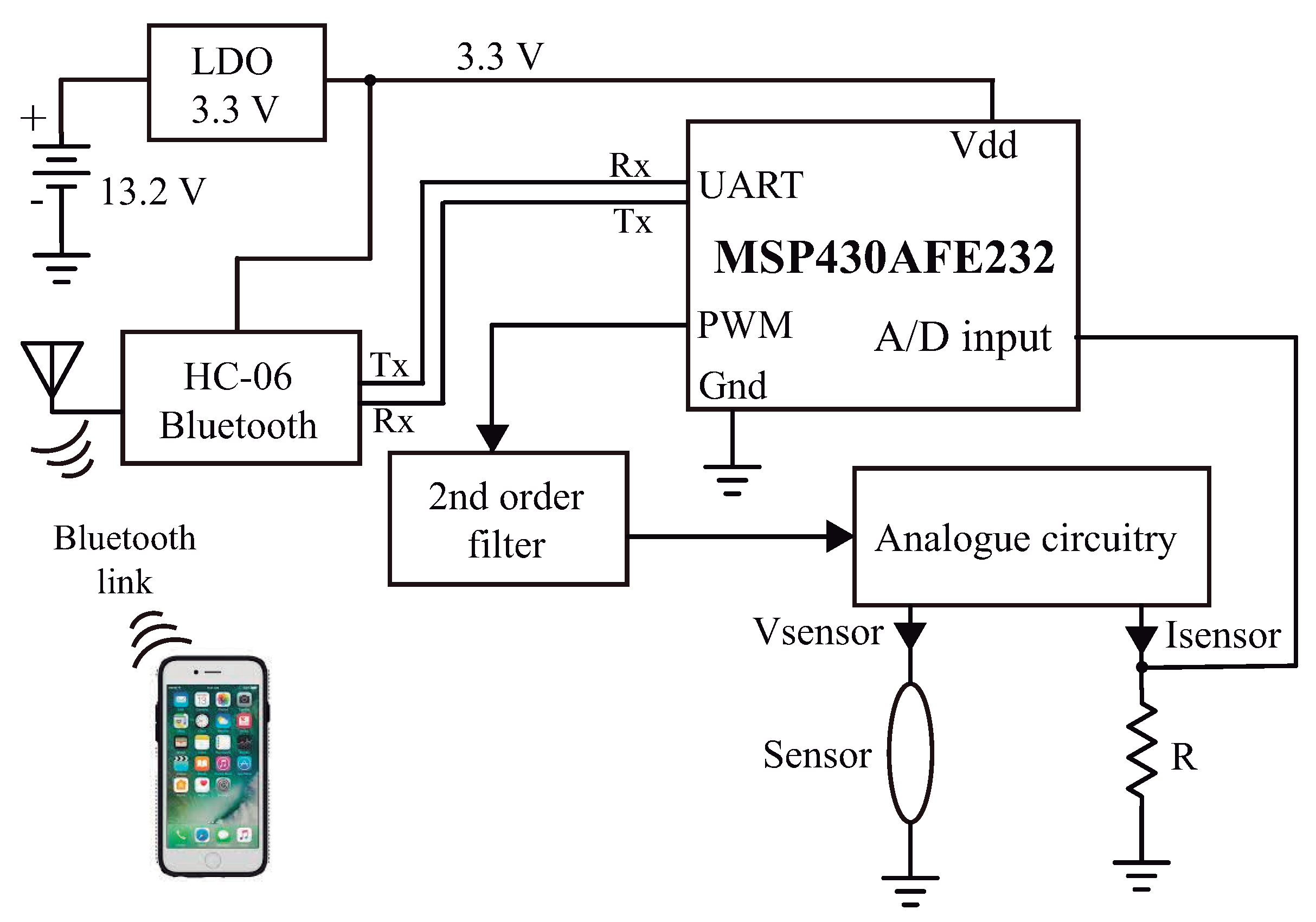
4. Signal Conditioning Circuit
4.1. Power Supplies and Digital Circuits
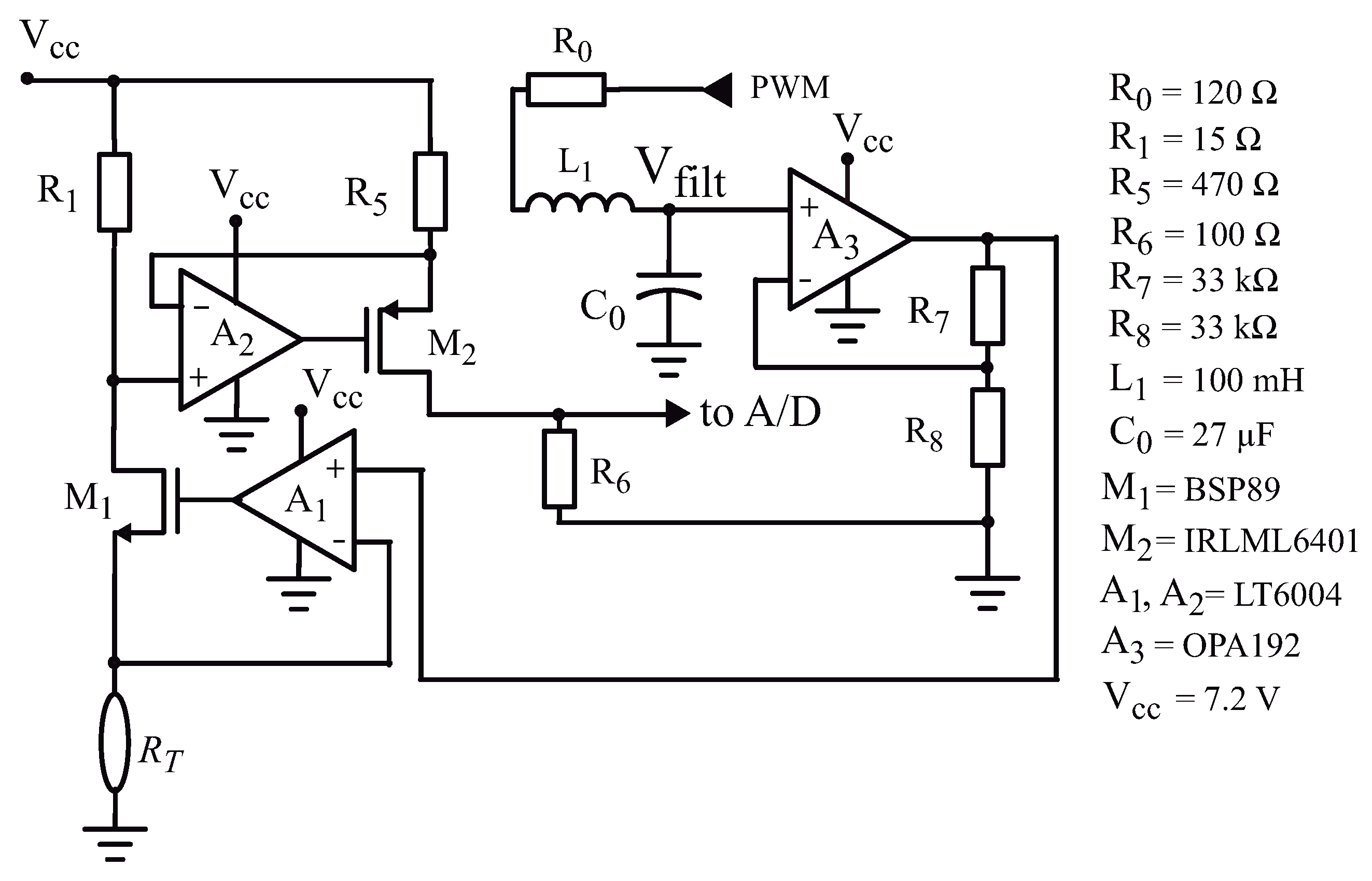
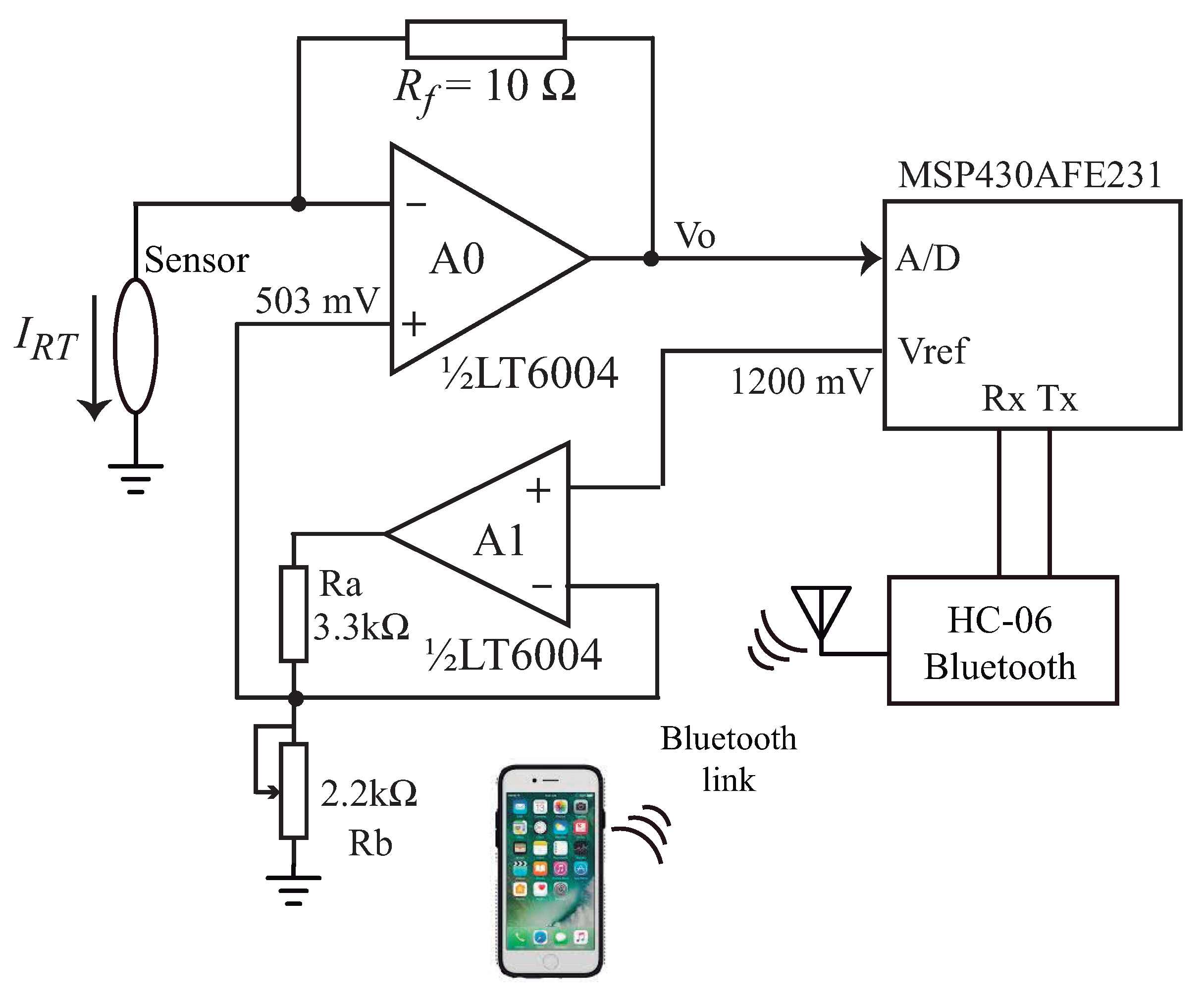
4.2. Analogue Section
5. Results
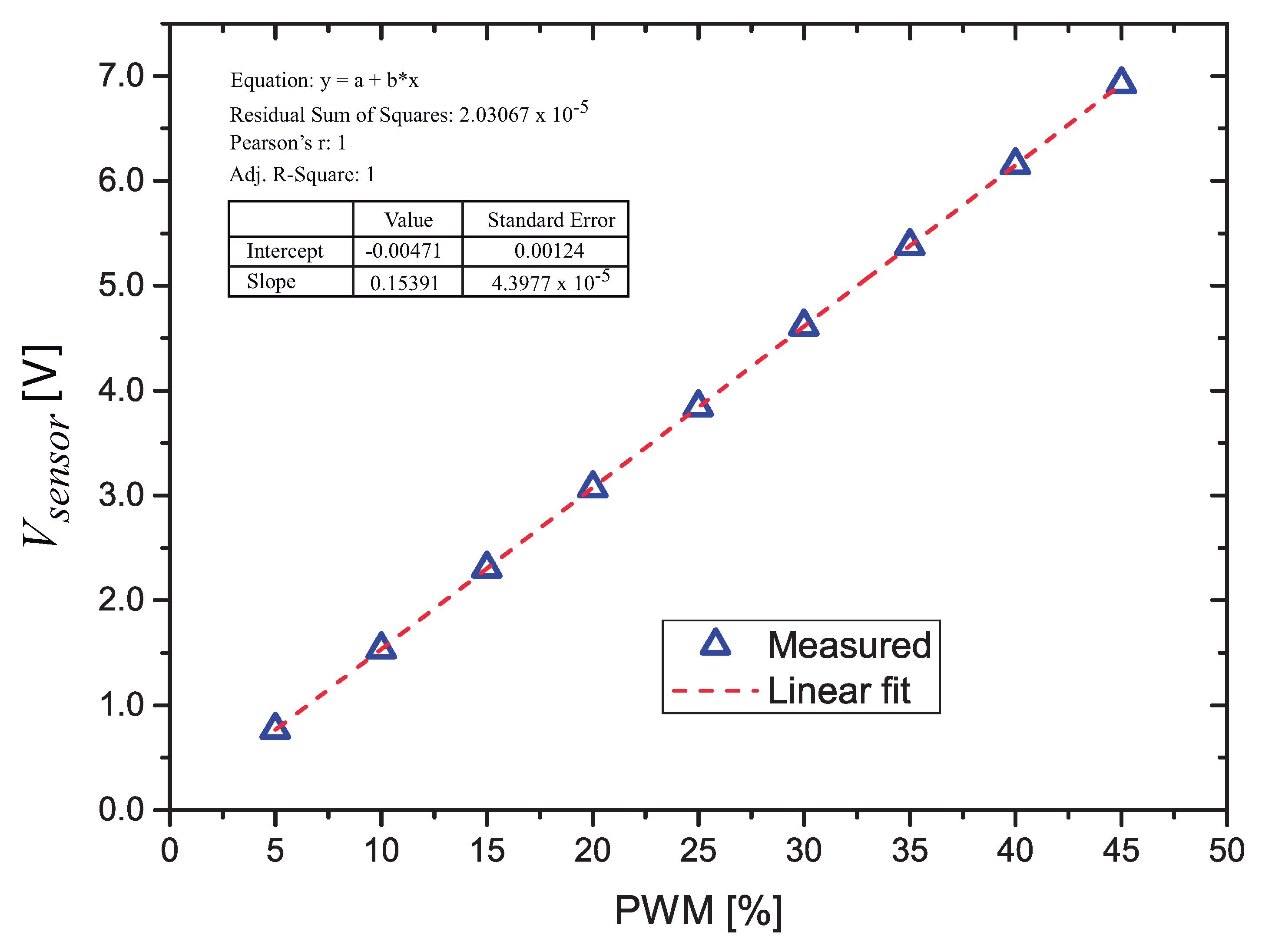
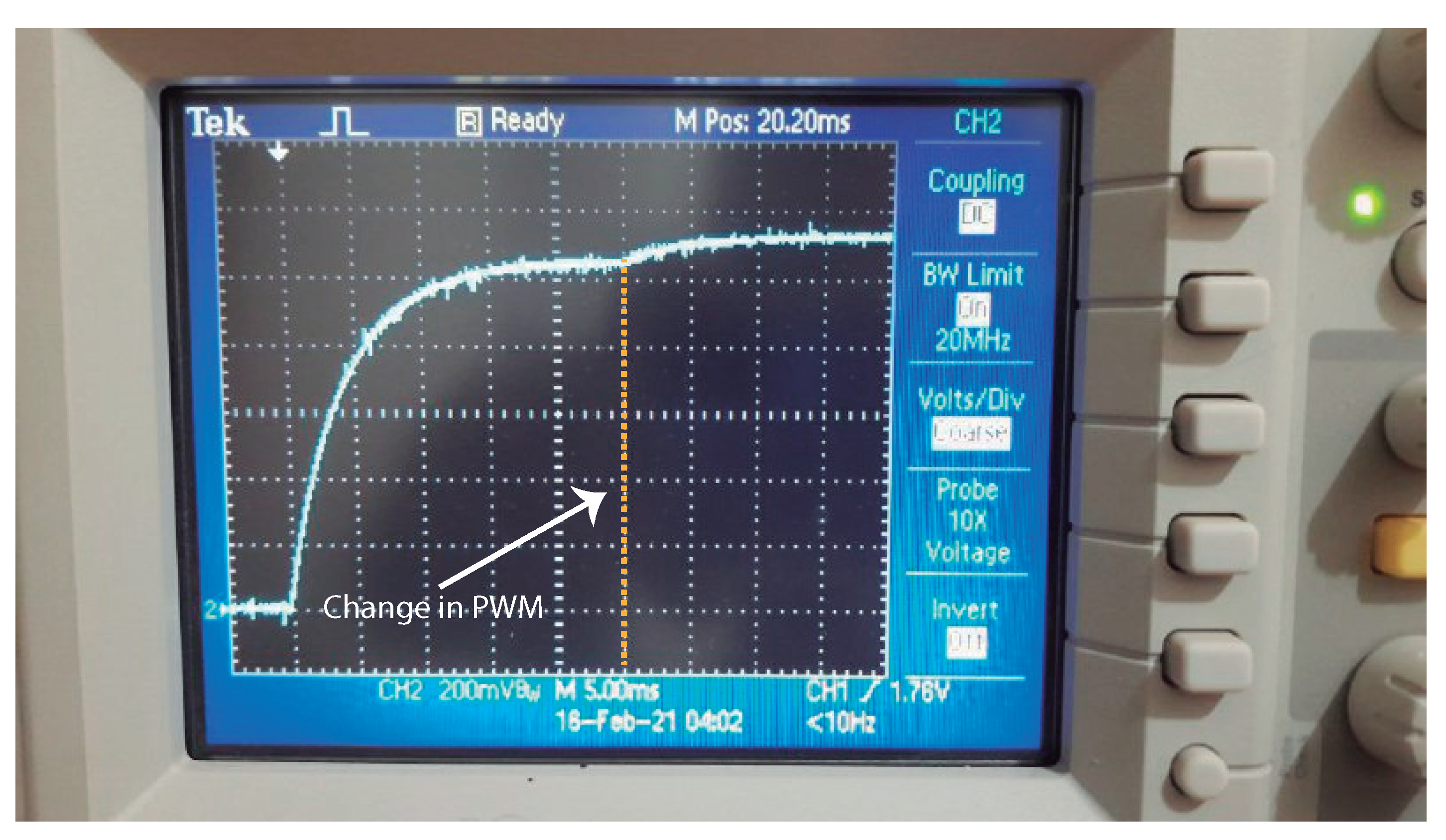
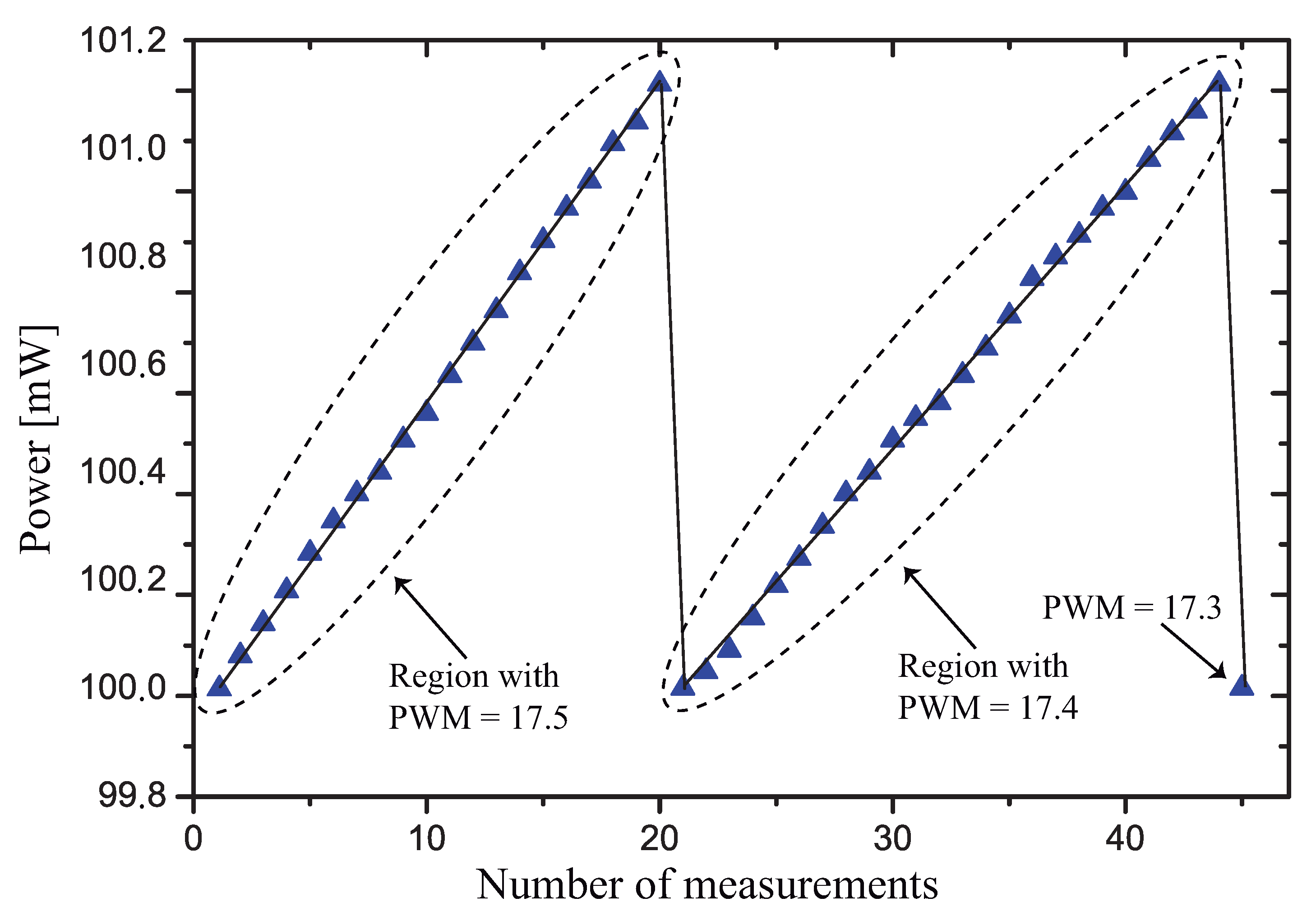
5.1. Characterization of the PWM
5.2. Characterization of the Thermosensitive Resistor
- ;
- ;
- .
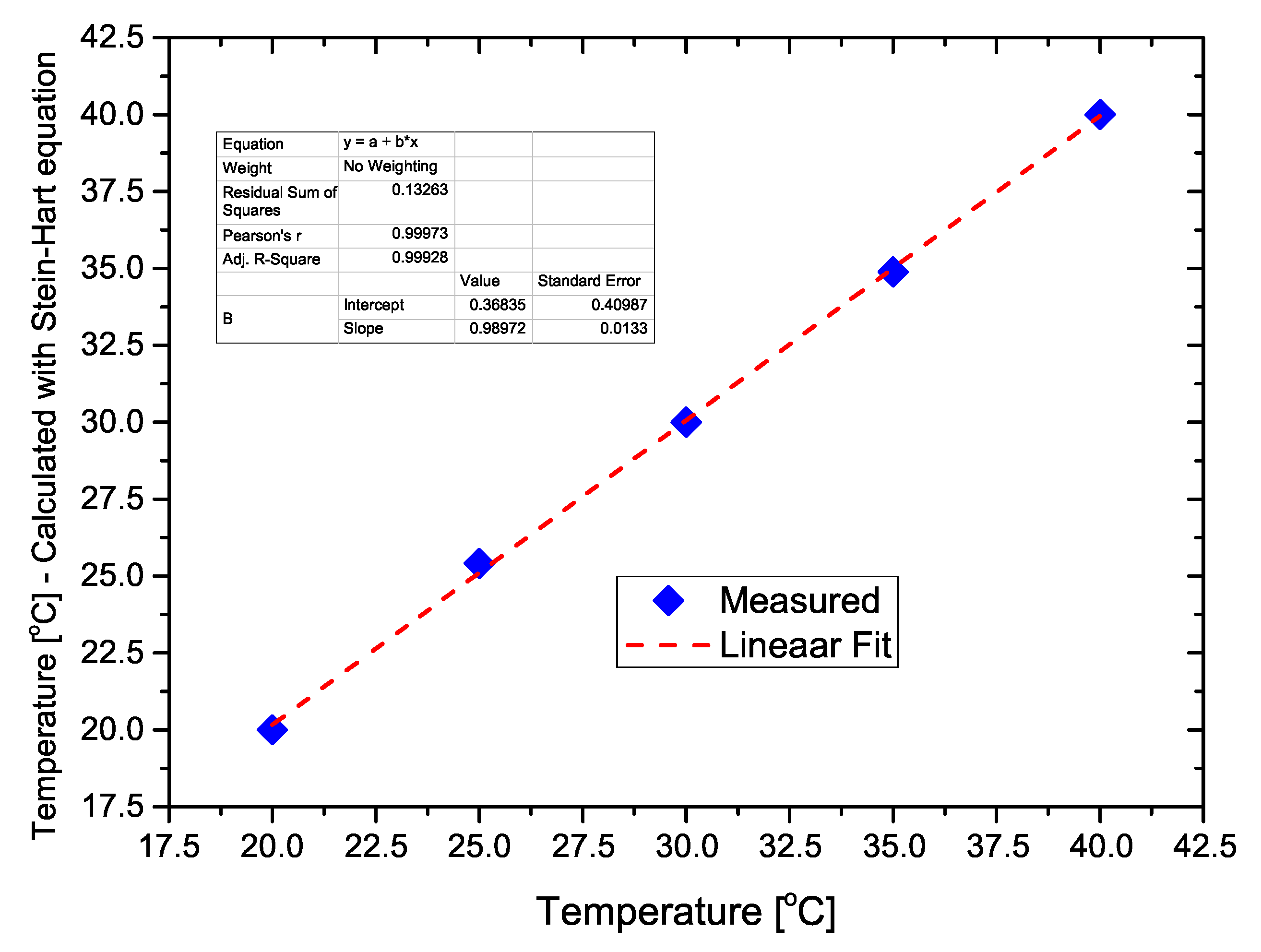
5.3. Measuring Temperature with the Resistor
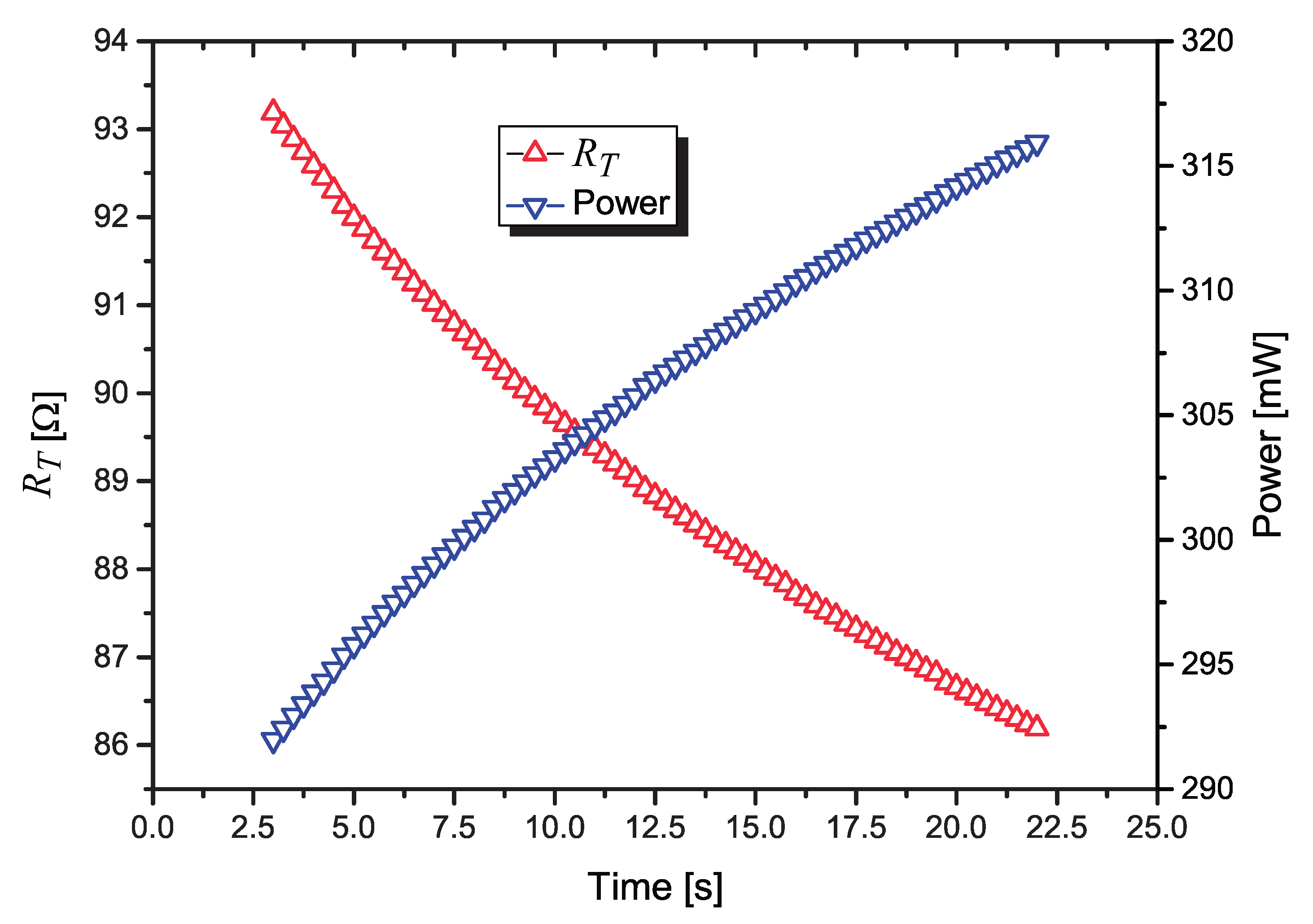
5.4. Variation of the Power Dissipated in
5.5. Characterization of the Power Control Circuit
- The routine starts with the control circuit turned-off and the circuit applying a very low voltage to the sensor during 2.5 s ( mV, PWM = 3.3%), so that the power applied to the sensor is approximately 2.8 mW, to avoid the self-heating of ;
- The first 1.75 s (seven measured points) are discarded, and the next three points (0.75 s) are measured and averaged to calculate the initial value of . The microcontroller uses Equation (6) to calculate the soil temperature. This initial temperature is important to provide a temperature correction in the sensor calibration curves, as proposed in [19];
- In our sensor, the target power in was set as mW. After the initial measurements at very low power, using the initial mean value of , the microcontroller calculates the voltage that must be applied to to achieve mW as:
- Next, using Equation (4), the new value of the that generates this is calculated, set by the microcontroller and applied to the filter/op-amps;
- starts to heat, and after 250 ms of self-heating an A/D conversion is performed and the new value of is calculated;
- Using the last values of and the new value of is calculated;
- With the current values of and the routine goes back to step #3 and repeats continuously for 20 s.
5.6. Characterization of the Sensor
- Firstly, a PVC container with many small holes (about 1 cm of diameter) in the bottom was “dressed” with a pouch made of gauze, and the structure was weighted.
- The container was filled with a loam clay soil, and put, with the sensor in a thermal chamber at C for 72 h;
- After dried, both the container with soil and the sensor were weighted, and the sensor was inserted in the soil.
- Next, a measurement of (soil dry) was taken using the developed circuit;
- The container with the gauze in the bottom was put in a container that was slowly filled with water, and the soil was saturated by capillarity during 48 h.
- After weighting the container, the soil gravimetric water content (mass of water/mass of soil) was calculated, %.
- Another measurement of (soil saturated) was taken.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, X.; Vuran, C.; Irmak, S. Autonomous precision agriculture through integration of wireless sensor networks with center pivot irrigation systems. Ad. Hoc. Netw. 2015, 11, 1975–1987. [Google Scholar] [CrossRef]
- Dean, R.N.; Rane, A.K.; Baginski, M.E.; Richard, J.; Hartzog, Z.; Elton, D.J. A Capacitive Fringing Field Sensor Design for Moisture Measurement Based on Printed Circuit Board Technology. IEEE Trans. Instrum. Meas. 2012, 61, 1105–1112. [Google Scholar] [CrossRef]
- Pelletier, M.; Schartz, R.; Holt, G.; Wanjura, J.; Green, T. Frequency Domain Probe Design for High Frequency Sensing of Soil Moisture. Agriculture 2016, 6, 60. [Google Scholar] [CrossRef]
- Hanson, B.; Peters, D.; Orloff, S. Effectiveness of tensiometers and electrical resistance sensors varies with soil conditions. Calif. Agric. 2000, 54, 47–50. [Google Scholar] [CrossRef]
- Bittelli, M. Measuring Soil Water Potential for Water Management in Agriculture: A Review. Sustainability 2010, 2, 1226–1251. [Google Scholar] [CrossRef]
- Bristow, K.L.; Whit, R.D.; Kluitenberg, G.J. Comparison of Single and Dual Probes for Measuring Soil Thermal Properties with Transient Heating. Aust. J. Soil Res. 1994, 32, 447–464. [Google Scholar] [CrossRef]
- Liu, G.; Li, B.; Ren, T.; Horton, R.; Si, B.C. Analytical solution of heat pulse method in a parallelepiped sample space with inclined needles. Soil Sci. Soc. Amer. J. 2008, 1208–1216. [Google Scholar] [CrossRef]
- Kamai, T.; Kluitenberg, G.; Jopmans, J. Design and numerical analysis of a button type heat pulse probe for soil water content measurement. Vadose J. 2009, 8, 167–173. [Google Scholar] [CrossRef]
- França, M.; Morais, F.; Carvalhaes-Dias, P.; Duarte, L.; Siqueira Dias, J.A. A Multiprobe Heat Pulse Sensor for Soil Moisture Measurement Based on PCB Technology. IEEE Trans. Instrum. Meas. 2019, 68, 606–613. [Google Scholar] [CrossRef]
- Valente, A.; Morais, R.; Couto, C.; Correia, J. Evaluation of a line heat dissipation sensor for measuring soil matric potential. Soil Sci. Soc. Am. J. 1996, 60, 1022–1028. [Google Scholar]
- Campbell Scientific LTD. Campbell 229 Heat Dissipation Matric Water Potential Sensor Instruction Manual; Campbell Scientific LTD: Loughborough, UK, 2006. [Google Scholar]
- Matile, L.; Berger, R.; Wächter, D.; Krebs, R. Characterization of a New Heat Dissipation Matric Potential Sensor. Sensors 2013, 13, 1137–1145. [Google Scholar] [CrossRef]
- Dias, P.C.; Roque, W.; Ferreira, E.C.; Dias, J.A.S. A high sensitivity single-probe heat pulse soil moisture sensor based on a single npn junction transistor. Comput. Electron. Agric. 2013, 96, 139–147. [Google Scholar] [CrossRef]
- Carvalhaes-Dias, P.; Morais, F.; Duarte, L.; Cabot, A.; Siqueira Dias, J.A. Autonomous Soil Water Content Sensors Based on Bipolar Transistors Encapsulated in Porous Ceramic Blocks. Appl. Sci. 2019, 9, 1211. [Google Scholar] [CrossRef]
- Shiozawa, S.; Campbell, G. Soil thermal conductivity. Remote Sens. Rev. 1990, 5, 301–310. [Google Scholar] [CrossRef]
- Dinh, T.; Phan, H.; Qamar, A.; Woodfield, P.; NguQamaryen, N.; Dao, D.V. Thermoresistive Effect for Advanced Thermal Sensors: Fundamentals, Design Considerations, and Applications. J. Microelectromechanical Syst. 2017, 26, 966–986. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Lim, K.H.; Xing, C.; Li, M.; Zhang, T.; Tang, P.; Arbiol, J.; Llorca, J.; Ng, K.M.; et al. Tin Diselenide Molecular Precursor for Solution-Processable Thermoelectric Materials. Angew. Chem. 2018, 130, 17309–17314. [Google Scholar] [CrossRef]
- Dias, P.; Morais, F.; França, M. Temperature-stable heat pulse driver circuit for low-voltage single supply soil moisture sensors based on junction transistors. Electron. Lett. 2016, 52, 208–210. [Google Scholar] [CrossRef]
- Flint, A.L.; Campbell, G.S.; Ellett, K.M.; Calissendorff, C. Calibration and Temperature Correction of Heat Dissipation Matric Potential Sensors. Soil Sci. Soc. Am. J. 2002, 66, 1439–1445. [Google Scholar] [CrossRef]
- Richards, L. Number 60; The American Society of Agronomy: Madison, WI, USA, 1965; pp. 1022–1028. [Google Scholar]
- Assouline, S.; Tessier, D. A conceptual model of the soil water retention curve. Water Resour. Res. 1998, 34, 223–231. [Google Scholar] [CrossRef]
- Castellini, M.; Di Prima, S.; Iovino, M. An assessment of the BEST procedure to estimate the soil water retention curve: A comparison with the evaporation method. Geoderma 2018, 320, 82–94. [Google Scholar] [CrossRef]
- Dias, P.; Cadavid, D.; Ortega, S.; Ruiz, A.; França, M.; Morais, F.; Ferreira, E.; Cabot, A. Autonomous soil moisture sensor based on nanostructured thermosensitive resistors powered by an integrated thermoelectric generator. Sens. Actuators A Phys. 2016, 239, 1–7. [Google Scholar] [CrossRef]
- Costa, E.F.; de Oliveira, N.E.; Morais, F.J.O.; Carvalhaes-Dias, P.; Duarte, L.F.C.; Cabot, A.; Dias, J.A.S. A self-powered and autonomous fringing field capacitive sensor integrated into a microsprinkler spinner to measure soil water content. Sensors 2017, 17, 575. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C | C | C | |
|---|---|---|---|
| 103.58 | 91.43 | 86.08 | |
| 0.042 | 0.039 | 0.024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morais, F.; Carvalhaes-Dias, P.; Zhang, Y.; Cabot, A.; Flosi, F.S.; Duarte, L.C.; Dos Santos, A.; Dias, J.A.S. Low-Cost Control and Measurement Circuit for the Implementation of Single Element Heat Dissipation Soil Water Matric Potential Sensor Based on a SnSe2 Thermosensitive Resistor. Sensors 2021, 21, 1490. https://doi.org/10.3390/s21041490
Morais F, Carvalhaes-Dias P, Zhang Y, Cabot A, Flosi FS, Duarte LC, Dos Santos A, Dias JAS. Low-Cost Control and Measurement Circuit for the Implementation of Single Element Heat Dissipation Soil Water Matric Potential Sensor Based on a SnSe2 Thermosensitive Resistor. Sensors. 2021; 21(4):1490. https://doi.org/10.3390/s21041490
Chicago/Turabian StyleMorais, Flávio, Pedro Carvalhaes-Dias, Yu Zhang, Andreu Cabot, Fábio S. Flosi, Luis Caparroz Duarte, Adelson Dos Santos, and José A. Siqueira Dias. 2021. "Low-Cost Control and Measurement Circuit for the Implementation of Single Element Heat Dissipation Soil Water Matric Potential Sensor Based on a SnSe2 Thermosensitive Resistor" Sensors 21, no. 4: 1490. https://doi.org/10.3390/s21041490
APA StyleMorais, F., Carvalhaes-Dias, P., Zhang, Y., Cabot, A., Flosi, F. S., Duarte, L. C., Dos Santos, A., & Dias, J. A. S. (2021). Low-Cost Control and Measurement Circuit for the Implementation of Single Element Heat Dissipation Soil Water Matric Potential Sensor Based on a SnSe2 Thermosensitive Resistor. Sensors, 21(4), 1490. https://doi.org/10.3390/s21041490