Today, awareness of the risk of using global navigation satellite systems (GNSS) in our daily lives and in any public or private infrastructure, known as “jamming”, is very important. In GNSS positioning, intentional jamming is considered the most disruptive event that drastically affects the reliability and quality of positioning or, in the worst case, makes positioning impossible [
1,
2]. Receiver manufacturers are well aware of this; hence, they invest a lot of effort in anti-interference features. However, under certain circumstances, GNSS equipment still proves to be susceptible to intentional interference [
3]. Improving the integrity and security of GNSS signals is an important issue that should be considered to achieve continuous and uninterrupted positioning. Jamming transmitters in cars alone already pose a major threat to the security and operation of infrastructure. As a wide range of infrastructure around the world—including industry, broadcasting and telecommunications, automotive, smart cities, internet of things, aerospace and defence—are directly dependent on GNSS; all benefit from this accurate and trusted service to support their operations. GNSS are so vulnerable for the following reasons: (a) the signal specifications are open to anyone, see [
4,
5,
6,
7]; (b) no signal protection systems have been implemented, except for the encrypted GNSS services such as the global positioning system (GPS) P(Y) and M-code, GLONASS P-code, Galileo’s public regulated service (PRS), and BeiDou’s military service [
8]; (c) an extremely weak signal is below the thermal noise of the receiver, i.e., −111 dBm for the GPS coarse acquisition (C/A) code signal [
9]; (d) the initial transmission power of the satellite signal of 30 W is reduced by
times at the receiver [
10]; (e) jamming and spoofing devices are readily available on the market, although their use is strictly prohibited [
11].
Jammers can be used in various scenarios; for example, they can be used in a static or kinematic mode, and they can be located on various vehicles, i.e., in cars or on the surface of aircraft. In the context of jamming, the driving motivation for the research presented in this paper was to perform some further experiments and to analyse the results in order to better understand some key factors that influence the quality of positioning under different locations of a jammer as well as under different jamming scenarios. Having studied the knowledge of the response of different types of geodetic receivers [
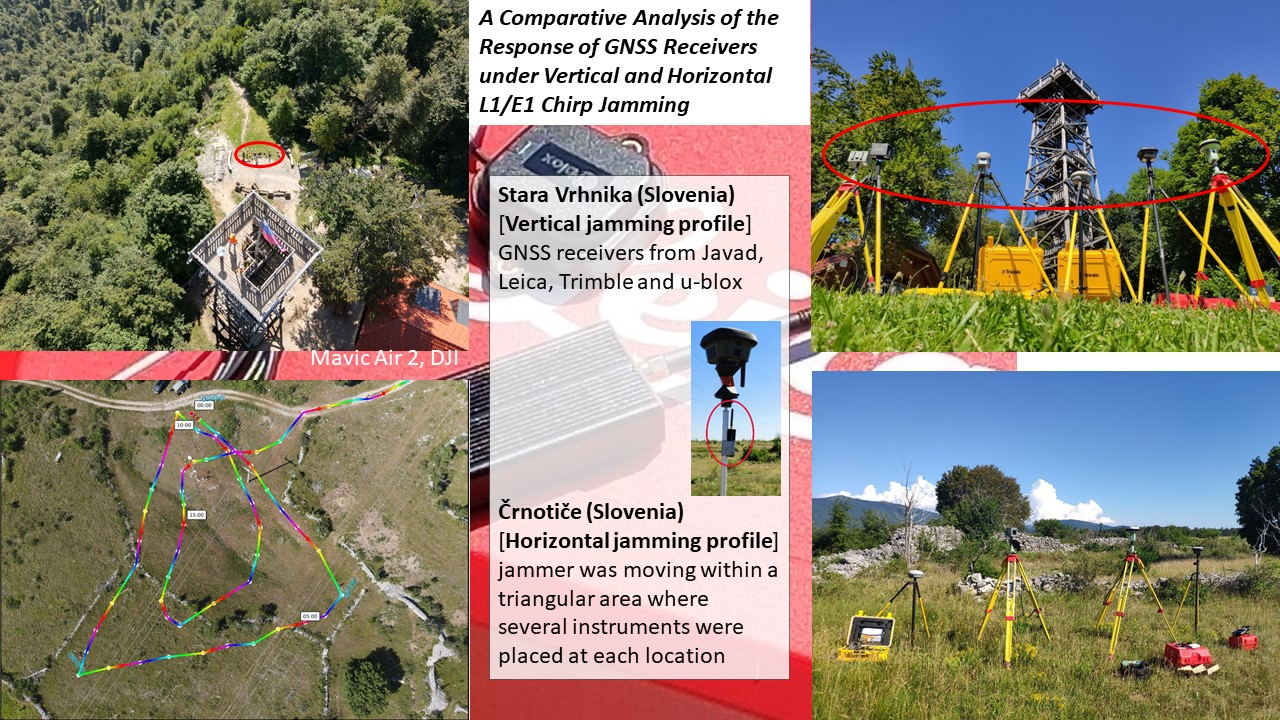
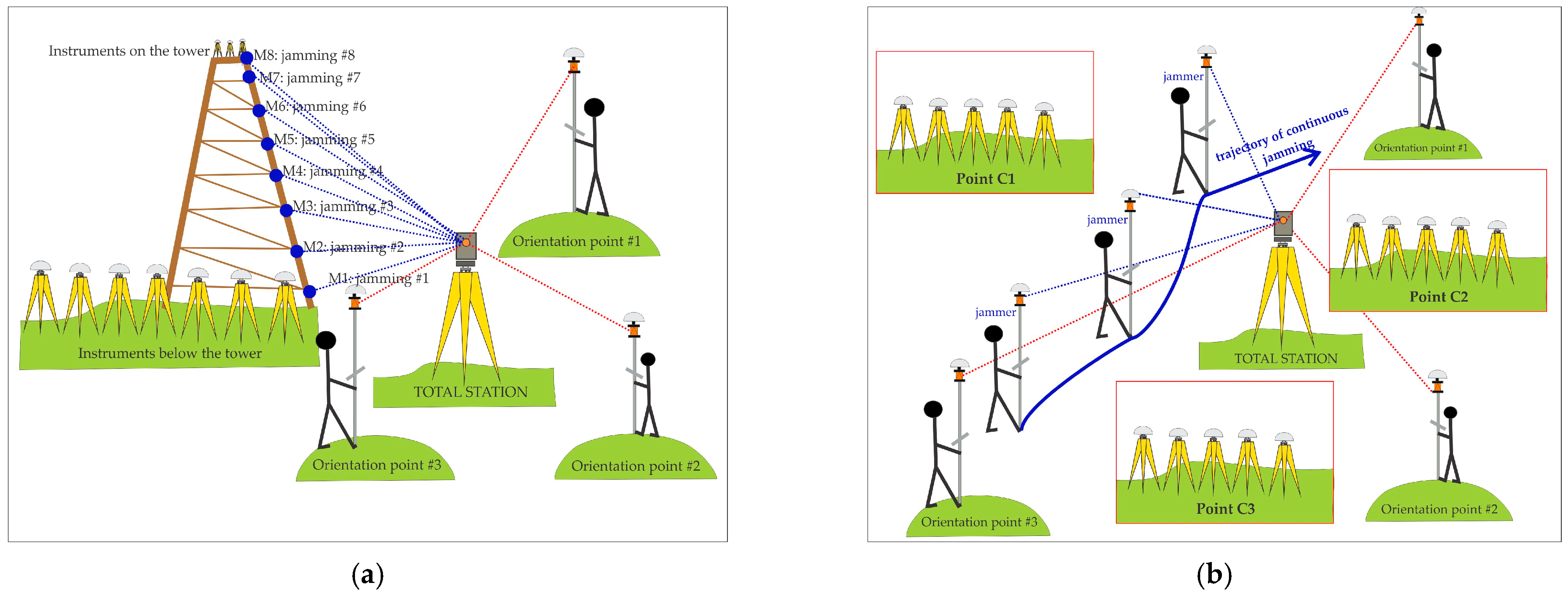
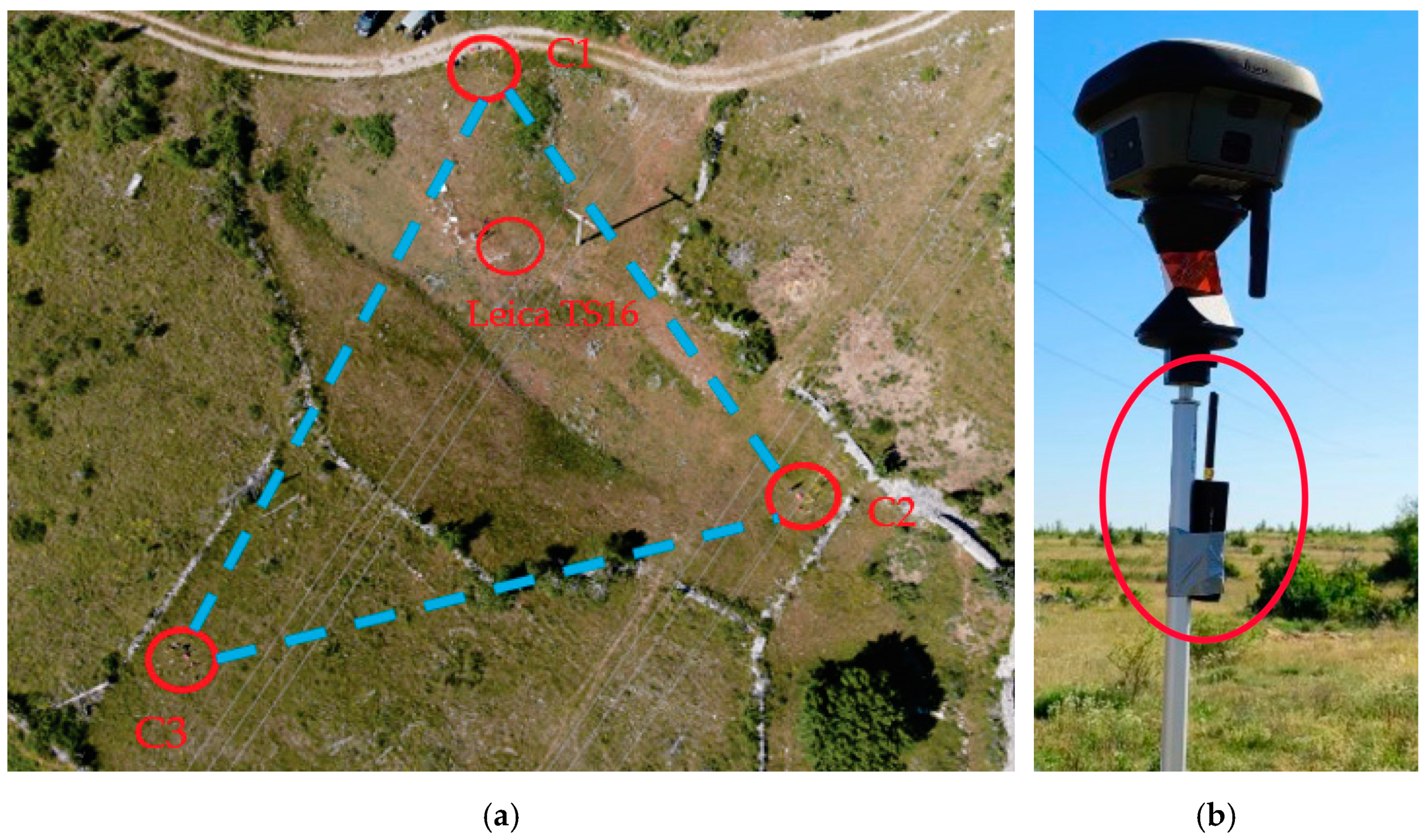
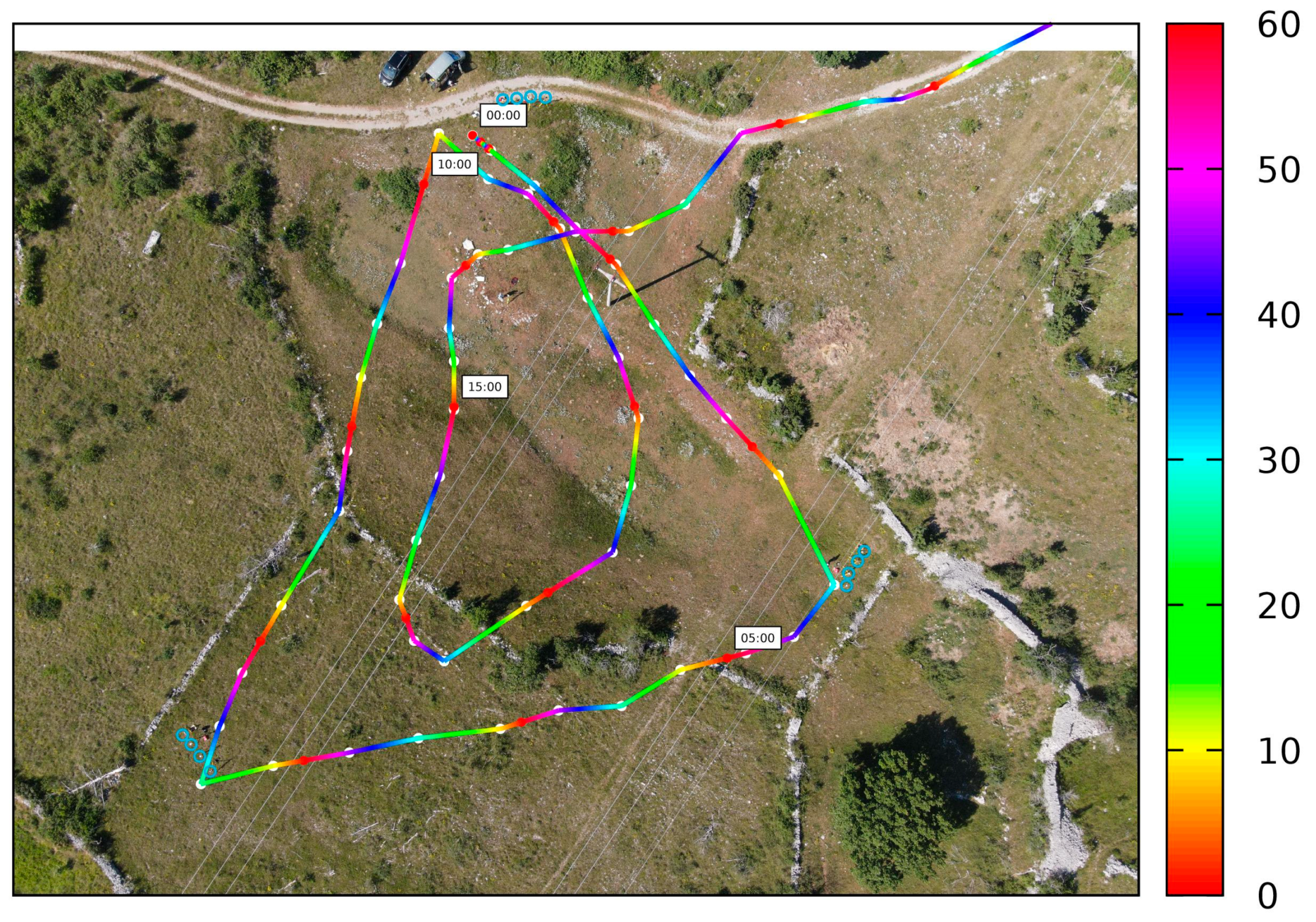
2], the researchers extended this study to the problem of the receiver response under the vertical and horizontal jamming profile. The basic research question was, “How do GNSS receivers of the same type react to vertical jamming when the jammer is below or above the horizon of the GNSS receivers?” and secondly, “What is the quality of GNSS positioning while horizontal jamming?” More specifically, the research focused on two different issues: (a) the effects of the vertical jammer profile and (b) the ability to determine the presence of a jammer horizontally by using a simple network of GNSS receivers.
The results of the vertical jamming profile are important in connection with the establishment and stabilisation of GNSS stations, where the receivers can be mounted on pillars or higher on buildings [
12]. If the jammer on the ground no longer interferes with the higher receivers on buildings, the suitability of such stabilisation is justified. Unfortunately, this raises another issue of the stability of buildings, which must be solved through a deformation analysis in order to obtain a good time series for geodynamic modelling or for maintaining the coordinate system. Furthermore, the problem of the vertical jamming profile also relates to unmanned aerial vehicles (UAV) equipped with GNSS-RTK (real-time kinematic), which allow the process of georeferencing by avoiding the determination of ground control points to be simplified [
13].
The analysis of jamming can be difficult, because in various situations, jammers can only eliminate a part of the visible satellites, meaning that the position is available but the accuracy decreases. In this situation, warnings of drastic changes in receiver-satellite geometry between real and predicted conditions should take precedence. Therefore, in this study, the researchers also investigated carrier-to-noise-zero (C/N
0) values. To estimate the positioning quality in geodetic applications, it is best to rely on the combined C/N
0 values and the number of available satellites [
14,
15]. Unfortunately, the dilution of the precision factors (DOPs) cannot be relied upon, since a higher DOP does not always mean that jamming is present; however, it can occur due to obstacles along the line of sight, especially in kinematic positioning.
1.1. Overview
In recent years, several jamming detectors have been proposed that use different signal characteristics to recognise interference. The simplest and most commonly used device is an energy detector, which can be used in both the time and frequency domain. Balaei et al. presented a frequency domain detector for the identification of narrowband continuous wave interference signals [
16]. Several measures were introduced for the detection of interference, namely estimation of the correlator output power, standard deviation of the correlator output power, carrier-phase fluctuation, and the gain of automatically adjustable controller between the analogue section of the front-end and the analog-to-digital converter [
17]. In the field of signal analysis, signal-to-noise ratio (SNR) or carrier-to-noise density (C/N
0) are often used for the detection of signal quality. Such detectors do not require access to the internal signal processing in the GNSS chipset, but they can detect any kind of signal interference. Unfortunately, they cannot distinguish between increased interference power and decreased GNSS signal power. This is the reason why C/N
0 detectors can only be effective at fixed locations without random signal attenuation caused by buildings. In addition, interference from a combined inertial navigation system and GNSS sensors, namely GNSS/INS sensors, can be detected [
18,
19,
20,
21]. Effective interference detection is based on a network of multiple antennas that can exploit the spatial characteristics of the signals received from satellites and from a jammer and distinguish whether the signals came from different directions. A detector that exploits the spatial properties of a single moving antenna was introduced in [
22]. As a countermeasure to jamming attacks, adaptive beam-forming techniques can be used for spatial filtering of a jamming signal. The advantage of multiple antenna arrays is that they can detect the jammer and are also able to mitigate the effects of interference by using beam-forming and nulling techniques [
23].
The authors demonstrated that jamming can be easily detected [
24] and localised [
25]; however, practical experience shows the opposite, especially in cases where a jammer is in its kinematic mode. Simple crowdsourcing methods involving reporting signal losses [
26] up to more sophisticated analyses of signal power or observed C/N
0 values [
27] are available to study the effect of interfering signals. The advantage of C/N
0-based detectors is that they recognise any kind of signal interference without any additional requirements; however, at the same time, there is a serious disadvantage because C/N
0 estimates decrease both in the case of interference of the GNSS receiver and that of attenuation of the desired GNSS signal by buildings or other obstacles. Therefore, C/N
0 detectors are only suitable at fixed positions at roadsides or on critical infrastructure, whereas in mobile scenarios in urban environments, their usefulness is questionable.
When interference occurs, there are three ways to geo-locate it, namely by (a) the received signal strength or strength difference (RSS/RSSD), (b) the signal arrival angle or direction (AOA/DOA/RSSD), and (c) the signal arrival time or frequency difference (TDOA/FDOA) [
28]. However, the results from all three methods depend to a large extent on different types of environments, for example, an open space or more complex suburban and urban environments. Faria et al. investigated jamming in different types of environments and in different propagation models based on the jamming-to-signal ratio (J/S) for a wide range of EIRP (effective isotropically radiated power) jamming signals at different distances in different environments, with the aim of estimating a safe zone for the operation of GNSS (GPS)-based systems [
29]. Their study was based on the determination of the horizontal safety zone for jamming, where the height of the jammer was set at 60 m and the height of the GPS receiver was set at 2 m.
Much effort has been put into the development of products that allow the transmission of warnings or other functions to inform users of any changes detected between the noise and the jamming signal. In November 2019, Netradar joined the European Space Agency’s Business Incubation Centres (ESA BICs) to develop a solution based on GNSS performance data from mobile phones via the Netradar app. For the aviation industry, an innovative way to detect GNSS jamming incidents on air traffic data based on automatic dependent surveillance-broadcast (ADS-B) data from open-sky receivers was proposed in [
30]. A more sophisticated approach that goes beyond warnings and tries to overcome jamming is based on the construction of anti-jamming receivers. A report on specially designed receivers with an anti-jamming-mechanism was presented by Felski [
31]; however, unfortunately such receivers are not available to everyone. The author mentions two CHRONOS products, namely CTL3520 and CTL3510 GPS jammer detectors, which can recognise the presence of jammers in the L1 band. However, the average GNSS user is not able to locate the interfering transmitter.
The results of a previous study conducted at the University of Ljubljana showed that the response of receivers from different manufacturers and generations is unique for each type of receiver tested [
2]. The aim of the present research is to determine the response of several receivers of the same type located in different positions to the same interfering signal. Evaluations of the quality of detection, tracking processes, and the possibilities of acquiring signals from GPS, GLONASS, Galileo, or BeiDou were performed in order to obtain a fingerprint of the influence of the L1/E1 chirp jammer on each individual GNSS receiver used in the experiment.
1.2. Previous Research
As GNSS jamming can be harmful to public, governmental, or commercial sectors, several studies have been carried out in the past. Different types of jammers and their characteristics have been investigated in [
32], with special emphasis on multi-frequency broadband jammers, which are able to interfere with up to three frequencies simultaneously. Since jamming effects were analysed outside vehicles [
32], a strong attenuation of metal structure was observed, while through-window directions were favoured. In [
33], a GNSS localisation of jammers was proposed based on a vehicle ad hoc network within an accuracy of less than 40 metres to determine the origin of the jammers. Field tests for this study were carried out in the GATE Berchtesgaden test environment where eight ground transmitters around the test area played the role of Galileo satellites. AOA, TDOA, and differential-received-signal strength (DRSS) were used to geolocate the jammers. In [
34,
35], the localisation of jammers was performed with low-cost GPS receivers and smartphones that provided C/N
0 measurements. In [
16], C/N
0 estimates for each satellite were used to detect a continuous wave (CW) interference signal. The research on the same basis, namely the approximation of the C/N
0 estimate as a Gaussian to obtain a further decision threshold for each satellite and elevation, was performed in [
36]. In this study, the authors have described a method for estimating C/N
0 values that avoids the need to access the internal signal processing in the GNSS chipset.
In several outdoor jamming experiments [
2,
33,
37,
38,
39,
40], the authors limited themselves to horizontal jamming scenarios by specifying different distances of the jammers depending on the GNSS receiver. In addition, they investigated the jamming performance in environments with various obstacles, i.e., in suburban and urban areas [
29], in most cases considering horizontal jamming scenarios. A deliberate jamming attack on GNSS receivers mounted on an aerial vehicle was presented in [
41], in which the authors proposed a two-stage interference suppression scheme based on antenna arrays that could detect and mitigate jamming and spoofing. However, based on the authors’ knowledge, no experiments on jamming with multiple geodetic GNSS receivers under a vertical jamming profile, wherein the same kind of geodetic and mass-market receivers were placed simultaneously below and above the receiver’s horizon, have been performed to date. To the contrary, several studies analysed the effects of various jammers at different horizontal distances and different propagation models [
29,
42,
43].
1.3. Paper Focus and Outline
Within the research area, the driving motivation for this study was to perform some further experiments under real jamming conditions and to analyse the results to get a better understanding of the performance of GNSS receivers under vertical and horizontal jamming profiles. The focus of this research is on the vulnerability of different types of GNSS receivers under two scenarios of jamming set up by radio frequency interference (RFI) for the GNSS L1/E1 spectrum. In order to achieve the goal, the authors conducted outdoor tests. First, the effects of static and kinematic jamming signals at the positions where the jammer was located below and above the receiver horizon were estimated. Secondly, the effects of kinematic horizontal jamming signals at the positions where the distances between the jammer and the GNSS receivers varied were estimated and tachymetrically determined within the jamming session. The key to this research is to gain experience by establishing a network of different types of GNSS receivers that could be used as C/N0 jamming detectors.
The remainder of this document is structured as follows:
Section 2 describes the setup and measurement campaigns, which is followed by a description of the experiments.
Section 3 describes GNSS observation models for jamming detection, followed by a description of data processing and the procedure for evaluating the results from the experiments (
Section 4).
Section 5 contains results and data analyses, including a discussion. Finally,
Section 6 presents a summary of the most important results and a description of further ideas for experiments.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}