Parametric Surface Modelling for Tea Leaf Point Cloud Based on Non-Uniform Rational Basis Spline Technique




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
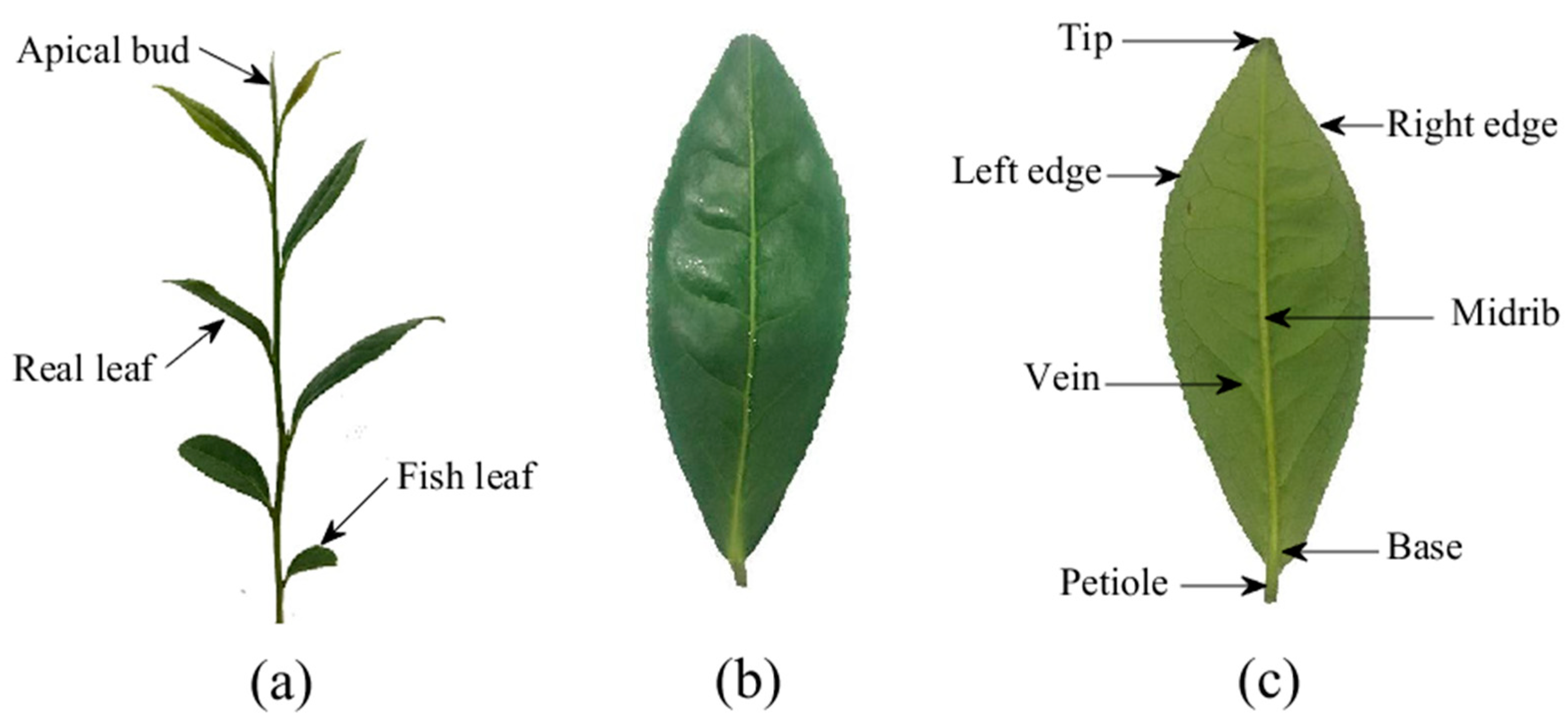
2.1. Data Acquisition
2.2. Data Pre-Processing
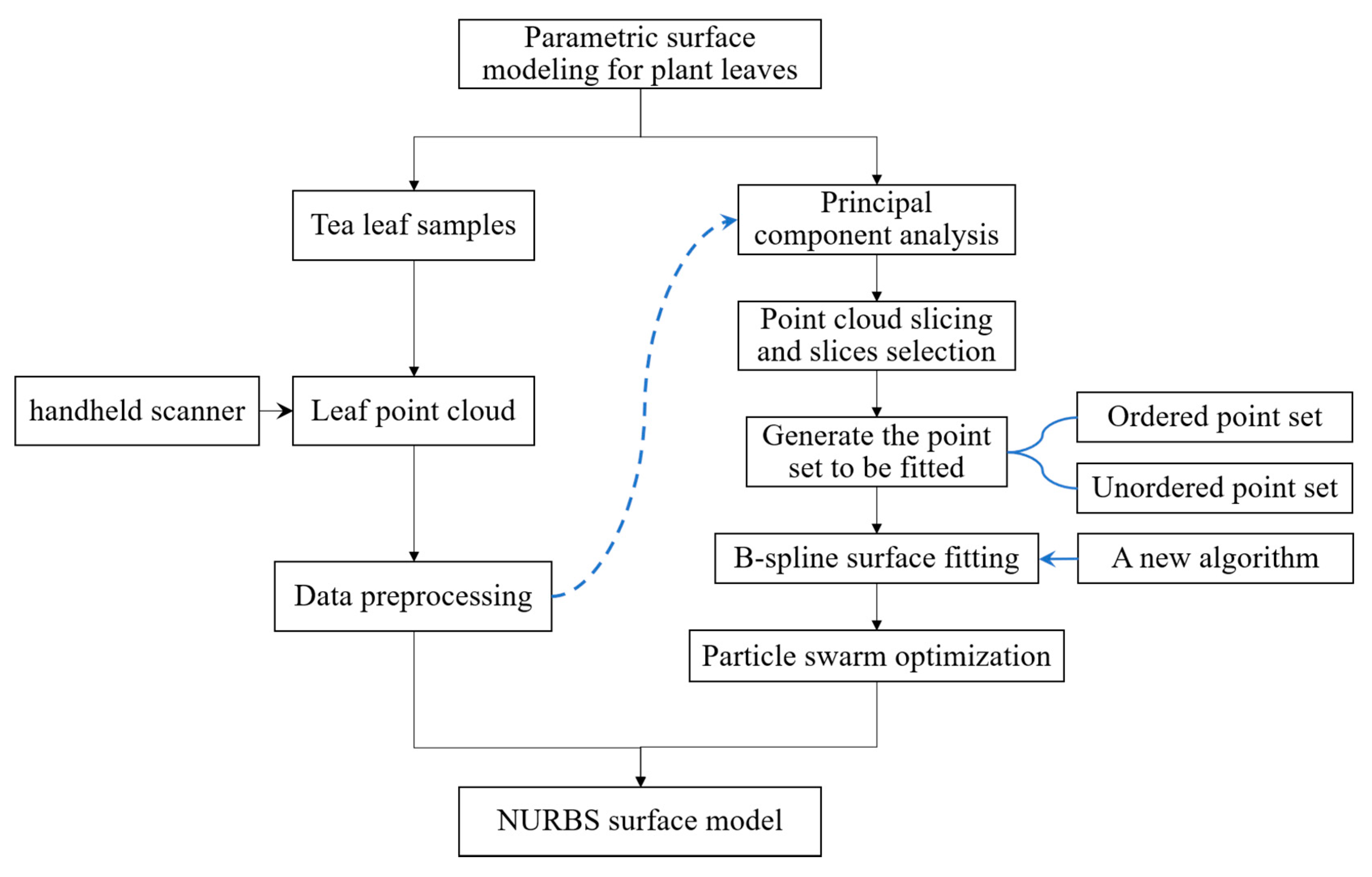
2.3. Parametric Surface Modelling
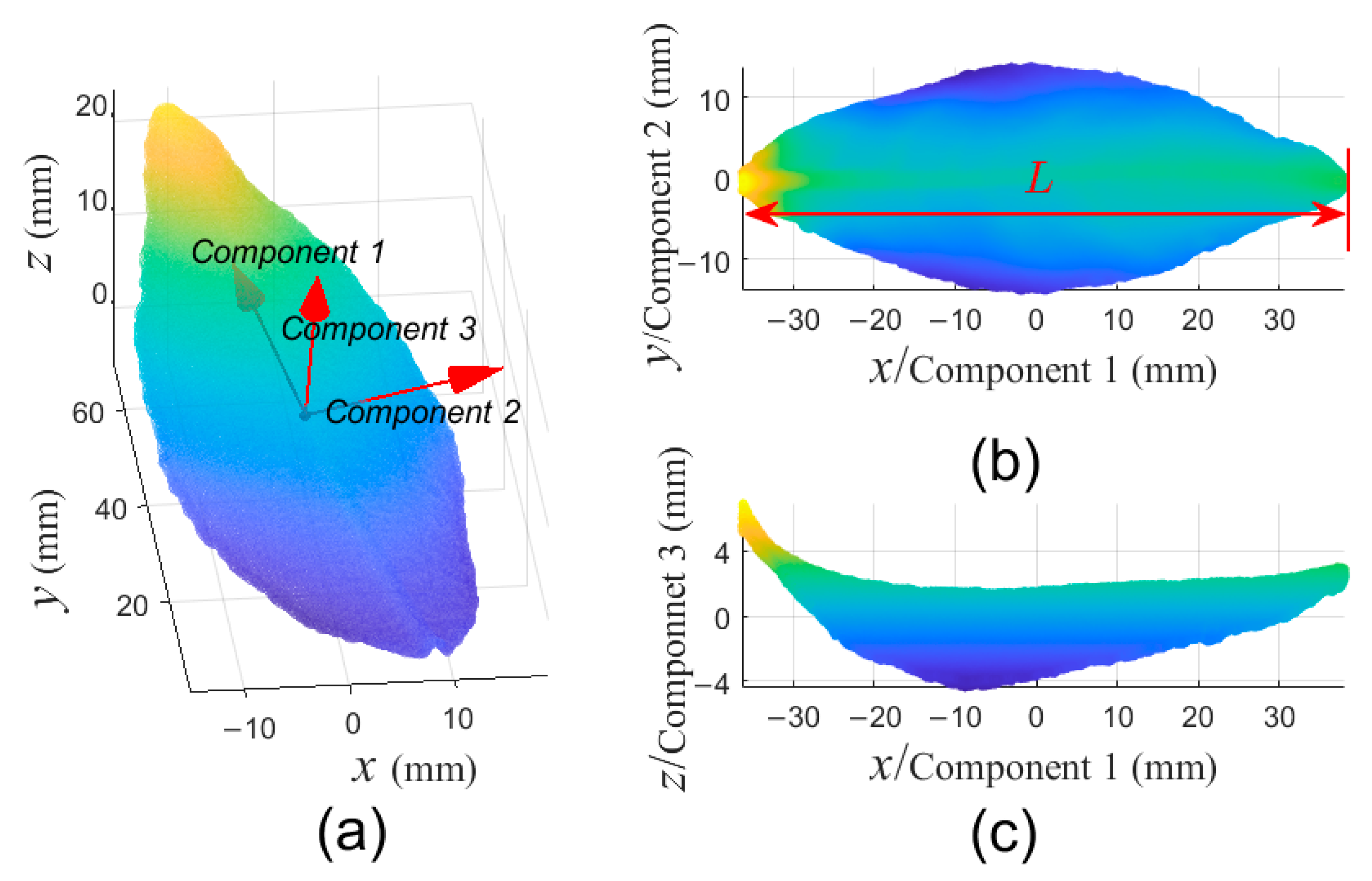
2.3.1. Principal Component Analysis of Leaf Point Cloud
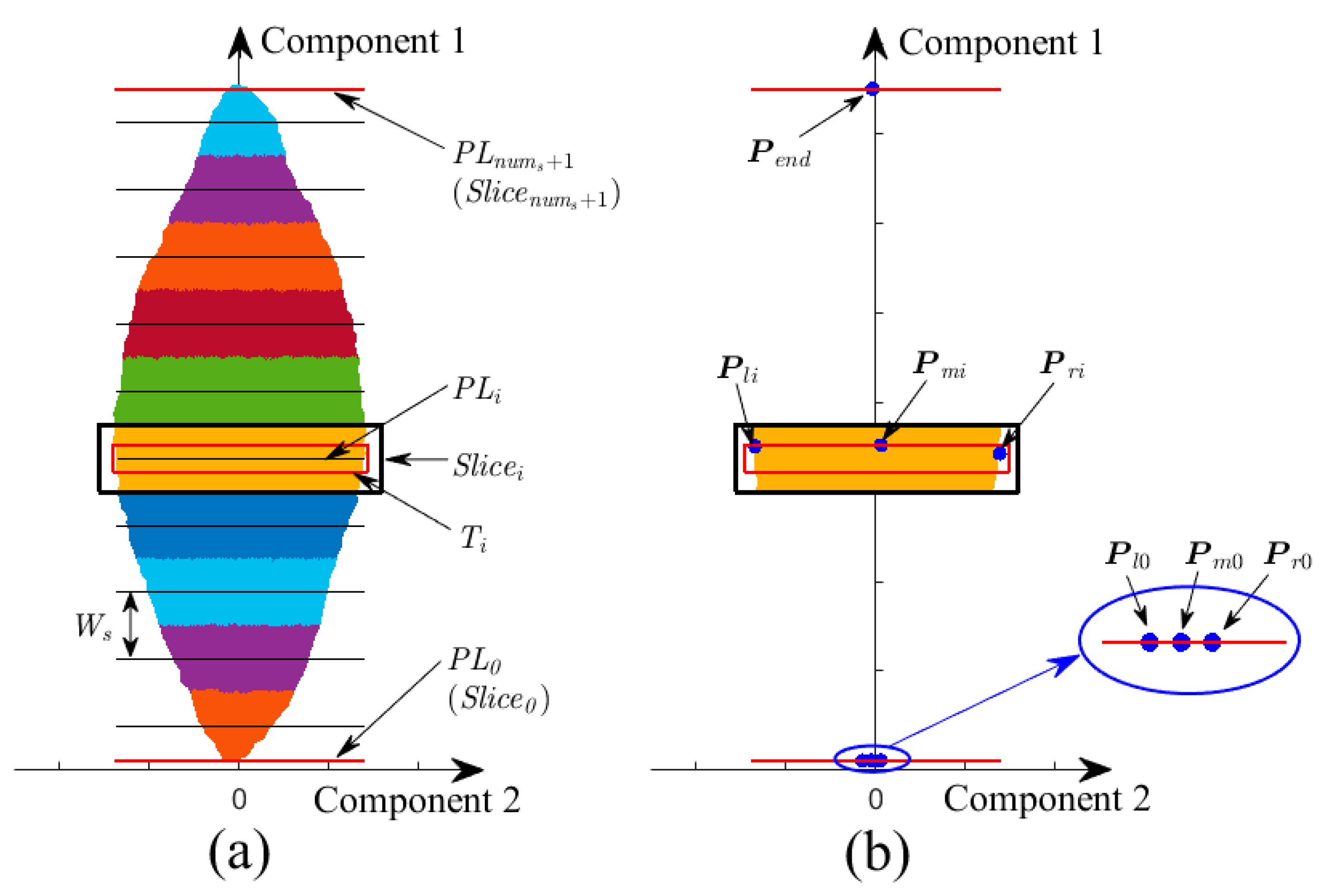
2.3.2. Point Cloud Slicing and Slice Selection
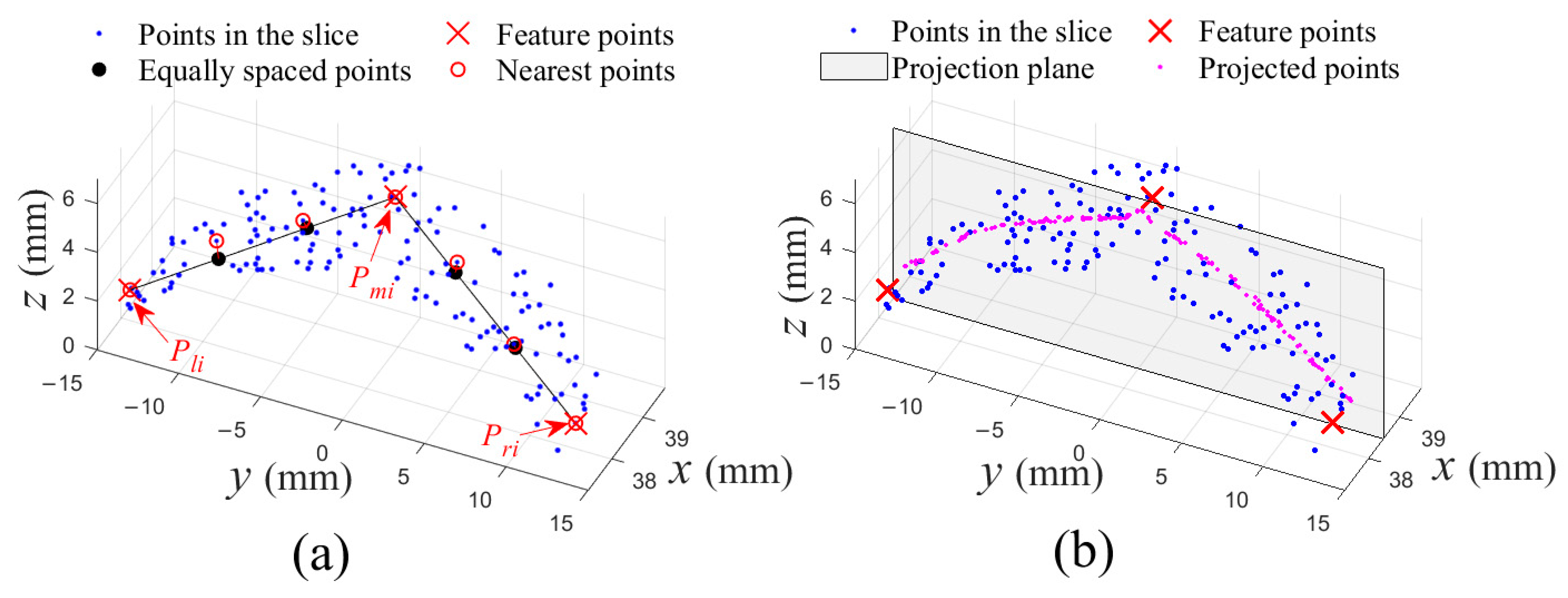
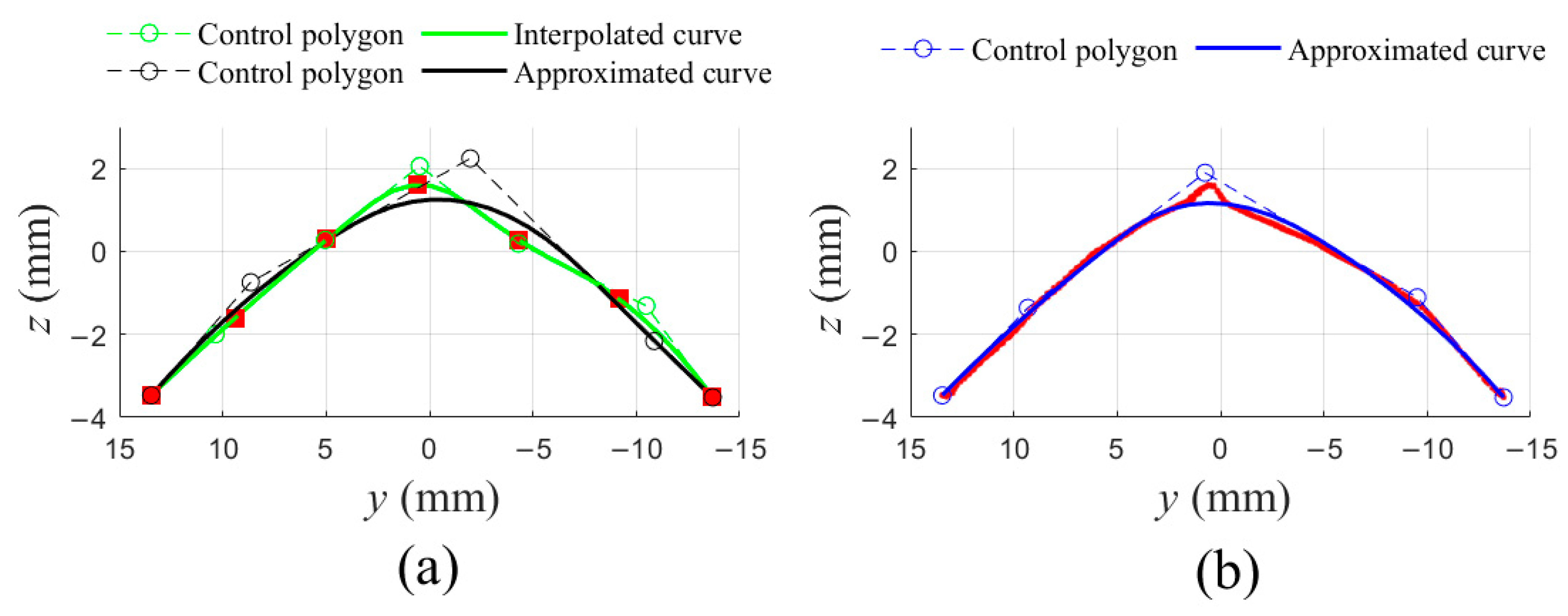
2.3.3. Generating the Point Set to Be Fitted
2.3.4. Accuracy Evaluation for Fitted Surface Model
2.3.5. Modeling the Point Set to Be Fitted
| Algorithm 1: A New B-spline surface fitting algorithm |
| Input: , , , , |
| Output: , , |
| 1: function |
| 2: // (1) Perform B-spline curve approximation through columns of points of (u-direction) |
| 3: for = 0 → do |
| 4: ← {[][], [][], …, [][]} |
| 5: Parameterize to obtain by Equations (A4), (A5), or (A6) |
| 6: Calculate knot vector using by Equation (A8) |
| 7: Fit into p −degree curve to obtain control points using and ▷ consists of points |
| 8: end for |
| 9: ← {,, …,} ▷ consists of points |
| 10: Calculate mean value of each elements of , , ..., to get knot vector |
| 11: // (2) Perform B-spline curve approximation through rows of points of the (v-direction) |
| 12: for = 0 → do |
| 13: ← {[][], [][], ..., [][]} |
| 14: Parameterize to obtain by Equations (A4), (A5), or (A6) |
| 15: Calculate knot vector using by Equation (A8) |
| 16: Fit into q−degree curve to obtain control points using and ▷ Pi consists of points |
| 17: end for |
| 18: ← {,, …,} ▷ consists of points |
| 19: Calculate mean value of each elements of , , ..., to get knot vector |
| 20: return , , |
| 21: end function |
3. Results
3.1. Case Study of the Proposed Parametric Surface Modeling Method
3.1.1. Generating an Ordered PSF and an Unordered PSF
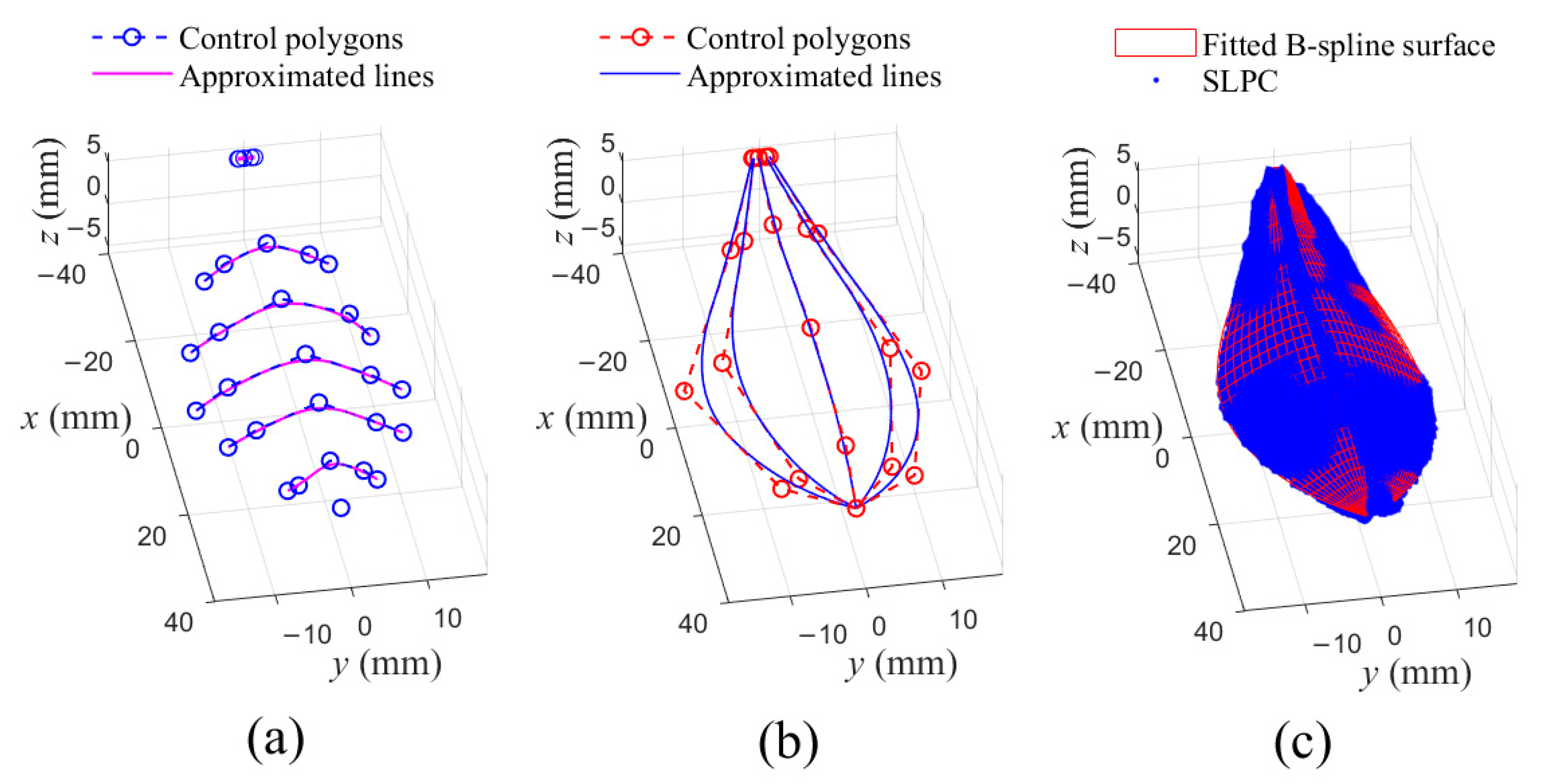
3.1.2. Fitting the PSF into NURBS Surface
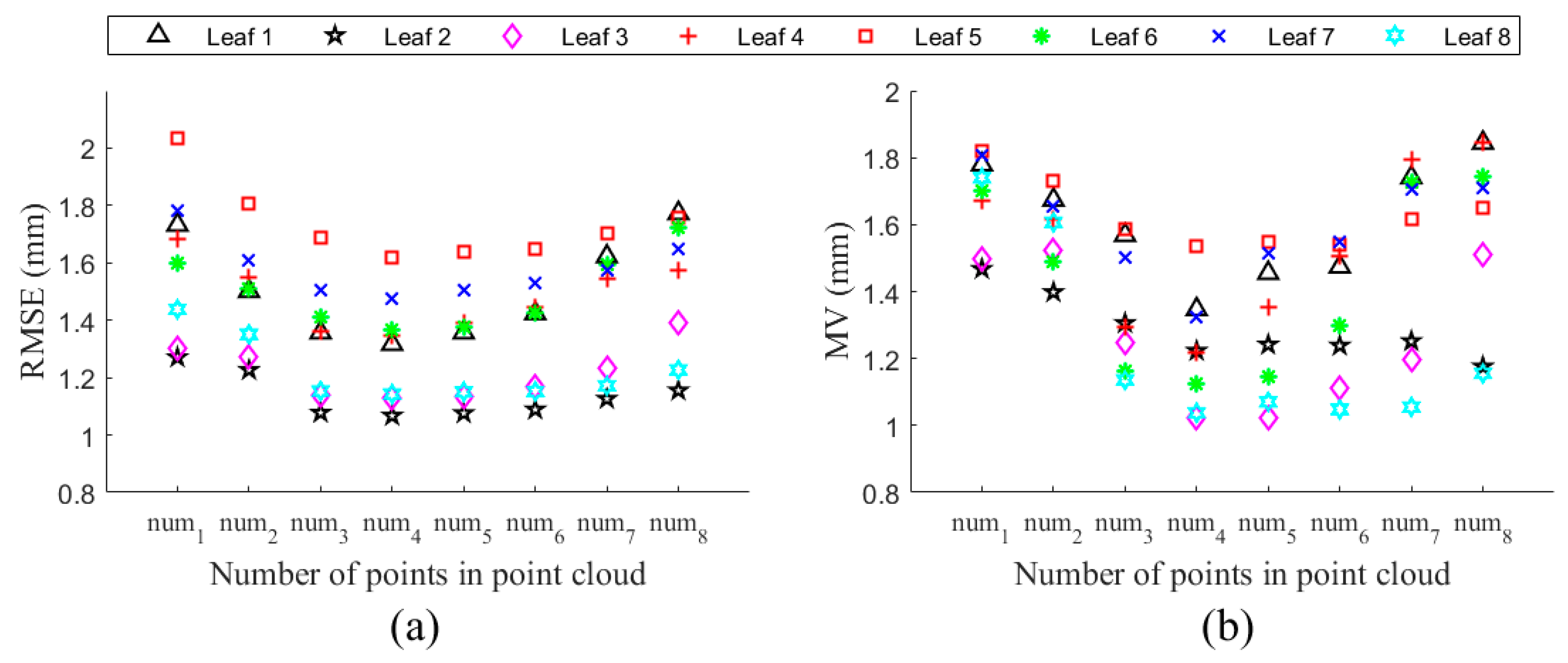
3.2. Impacts of Point’s Number in Point Cloud on Fitting Accuracy
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
| Algorithm A1: General algorithms for B-spline surface fitting |
| Input: , , , , |
| Output: , , |
| 1: function |
| 2:// (1) Compute fixed parameterized values u and knot vector |
| 3: for = 0 → do |
| 4: ← {[][], [][], …, [][]} |
| 5: Parameterize to obtain by Equation (A4), (A5), or (A6) |
| 6: end for |
| 7: Calculate mean values of each elements of , , …, to get the |
| 8: Compute using by Equations (A7) or (A8) for interpolation or approximation, respectively |
| 9: Parameterized values and knot vector can be obtained by using rows of points of like and |
| 10: // (2) Perform B-spline curve fitting through columns of points of (u-direction) |
| 11: for = 0 → do |
| 12: ← {[][], [][], …, [][]} |
| 13: Fit into p−degree curve to obtain control points using and ▷ consists of points |
| 14: end for |
| 15: ← {, , …, } ▷ consists of points |
| 16: // (3) Perform B-spline curve fitting through rows of points of (v-direction) |
| 17: for = 0 → do |
| 18: ← {[][], [][], ..., [][]} |
| 19: Fit into q−degree curve to obtain control points using and ▷ consists of points |
| 20: end for |
| 21: ← {, , …, } ▷ P consists of points |
| 22: return , , |
| 23: end function |
Appendix C
References
- Abichou, M.; Fournier, C.; Dornbusch, T.; Chambon, C.; de Solan, B.; Gouache, D.; Andrieu, B. Parameterising wheat leaf and tiller dynamics for faithful reconstruction of wheat plants by structural plant models. Field Crops Res. 2018, 218, 213–230. [Google Scholar] [CrossRef]
- Song, H.; Li, Y.; Zhou, L.; Xu, Z.; Zhou, G. Maize leaf functional responses to drought episode and rewatering. Agric. For. Meteorol. 2018, 249, 57–70. [Google Scholar] [CrossRef]
- Jiang, B.; Wang, P.; Zhuang, S.; Li, M.; Li, Z.; Gong, Z. Detection of maize drought based on texture and morphological features. Comput. Electron. Agric. 2018, 151, 50–60. [Google Scholar] [CrossRef]
- Thomas, F.M.; Yu, R.; Schäfer, P.; Zhang, X.; Lang, P. How diverse are Populus “diversifolia” leaves? Linking leaf morphology to ecophysiological and stand variables along water supply and salinity gradients. Flora 2017, 233, 68–78. [Google Scholar] [CrossRef]
- Åström, H.; Metsovuori, E.; Saarinen, T.; Lundell, R.; Hänninen, H. Morphological characteristics and photosynthetic capacity of Fragaria vesca L. winter and summer leaves. Flora Morphol. Distrib. Funct. Ecol. Plants 2015, 215, 33–39. [Google Scholar] [CrossRef]
- Chambelland, J.-C.; Dassot, M.; Adam, B.; Donès, N.; Balandier, P.; Marquier, A.; Saudreau, M.; Sonohat, G.; Sinoquet, H. A double-digitising method for building 3D virtual trees with non-planar leaves: Application to the morphology and light-capture properties of young beech trees (Fagus sylvatica). Funct. Plant Biol. 2008, 35, 1059–1069. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, Y.; Liu, F.; Zhao, R.; Quan, X.; Wang, C. Nutrient resorption estimation compromised by leaf mass loss and area shrinkage: Variations and solutions. For. Ecol. Manag. 2020, 472, 118232. [Google Scholar] [CrossRef]
- Holder, C.D.; Lauderbaugh, L.K.; Ginebra-Solanellas, R.M.; Webb, R. Changes in leaf inclination angle as an indicator of progression toward leaf surface storage during the rainfall interception process. J. Hydrol. 2020, 588, 125070. [Google Scholar] [CrossRef]
- Ginebra-Solanellas, R.M.; Holder, C.D.; Lauderbaugh, L.K.; Webb, R. The influence of changes in leaf inclination angle and leaf traits during the rainfall interception process. Agric. For. Meteorol. 2020, 285–286, 107924. [Google Scholar] [CrossRef]
- Kim, D.; Kang, W.H.; Hwang, I.; Kim, J.; Kim, J.H.; Park, K.S.; Son, J.E. Use of structurally-accurate 3D plant models for estimating light interception and photosynthesis of sweet pepper (Capsicum annuum) plants. Comput. Electron. Agric. 2020, 177, 105689. [Google Scholar] [CrossRef]
- Min, Z.; Li, R.; Zhao, X.; Li, R.; Zhang, Y.; Liu, M.; Wei, X.; Fang, Y.; Chen, S. Morphological variability in leaves of Chinese wild Vitis species. Sci. Hortic. 2018, 238, 138–146. [Google Scholar] [CrossRef]
- Shakoor, N.; Lee, S.; Mockler, T.C. High throughput phenotyping to accelerate crop breeding and monitoring of diseases in the field. Curr. Opin. Plant Biol. 2017, 38, 184–192. [Google Scholar] [CrossRef]
- Mortensen, A.K.; Bender, A.; Whelan, B.; Barbour, M.M.; Sukkarieh, S.; Karstoft, H.; Gislum, R. Segmentation of lettuce in coloured 3D point clouds for fresh weight estimation. Comput. Electron. Agric. 2018, 154, 373–381. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Q.; Wang, P.; Li, Z.; Wang, H. Automated classification of stems and leaves of potted plants based on point cloud data. Biosyst. Eng. 2020, 200, 215–230. [Google Scholar] [CrossRef]
- Elnashef, B.; Filin, S.; Lati, R.N. Tensor-based classification and segmentation of three-dimensional point clouds for organ-level plant phenotyping and growth analysis. Comput. Electron. Agric. 2019, 156, 51–61. [Google Scholar] [CrossRef]
- Lu, H.; Tang, L.; Whitham, S.A.; Mei, Y. A Robotic Platform for Corn Seedling Morphological Traits Characterization. Sensors 2017, 17, 2082. [Google Scholar] [CrossRef] [PubMed]
- Wahabzada, M.; Paulus, S.; Kersting, K.; Mahlein, A.K. Automated interpretation of 3D laserscanned point clouds for plant organ segmentation. BMC Bioinform. 2015, 16, 248. [Google Scholar] [CrossRef] [PubMed]
- Paulus, S.; Dupuis, J.; Mahlein, A.-K.; Kuhlmann, H. Surface feature based classification of plant organs from 3D laserscanned point clouds for plant phenotyping. BMC Bioinform. 2013, 14, 238. [Google Scholar] [CrossRef] [PubMed]
- George, P.L.; Seveno, E. The advancing-front mesh generation method revisited. Int. J. Numer. Methods Eng. 1994, 37, 3605–3619. [Google Scholar] [CrossRef]
- Chen, Z.; Cao, J.; Wang, W. Isotropic Surface Remeshing Using Constrained Centroidal Delaunay Mesh. Comput. Graph. Forum 2012, 31, 2077–2085. [Google Scholar] [CrossRef]
- Hou, T.; Zheng, B.; Xu, Z.; Yang, Y.; Chen, Y.; Guo, Y. Simplification of leaf surfaces from scanned data: Effects of two algorithms on leaf morphology. Comput. Electron. Agric. 2016, 121, 393–403. [Google Scholar] [CrossRef]
- Paproki, A.; Sirault, X.; Berry, S.; Furbank, R.; Fripp, J. A novel mesh processing based technique for 3D plant analysis. BMC Plant Biol. 2012, 12, 63. [Google Scholar] [CrossRef] [PubMed]
- Oqielat, M.A.N. Application of interpolation finite element methods to a real 3D leaf data. J. King Saud Univ. Sci. 2020, 32, 200–206. [Google Scholar] [CrossRef]
- Oqielat, M.N. Surface fitting methods for modelling leaf surface from scanned data. J. King Saud Univ. Sci. 2019, 31, 215–221. [Google Scholar] [CrossRef]
- Wen, W.; Li, B.; Li, B.-J.; Guo, X. A Leaf Modeling and Multi-Scale Remeshing Method for Visual Computation via Hierarchical Parametric Vein and Margin Representation. Front. Plant Sci. 2018, 9, 783. [Google Scholar] [CrossRef]
- Wang, X.; Li, L.; Chai, W. Geometric modeling of broad-leaf plants leaf based onB-spline. Math. Comput. Model. 2013, 58, 564–572. [Google Scholar] [CrossRef]
- Wang, L.; Lu, L.; Jiang, N. A study of leaf modeling technology based on morphological features. Math. Comput. Model. 2011, 54, 1107–1114. [Google Scholar] [CrossRef]
- Beardsley, P.; Chaurasia, G. Editable Parametric Dense Foliage from 3D Capture. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5315–5324. [Google Scholar]
- Piegl, L.; Tiller, W. The NURBS Book, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 1944, pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Parameter Selection in Particle Swarm Optimization; Springer: Berlin/Heidelberg, Germany; pp. 591–600.
- Connolly, C. Cumulative generation of octree models from range data. In Proceedings of the 1984 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 13–15 March 1984; pp. 25–32. [Google Scholar]
- Oqielat, M.A.N. Modelling leaf surface reconstruction using Bernstein polynomials method. Comput. Appl. Math. 2020, 39, 268. [Google Scholar] [CrossRef]
- Garland, M.; Heckbert, P.S. Surface simplification using quadric error metrics. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques; ACM Press/Addison-Wesley Publishing Co.: New York, NY, USA; pp. 209–216.
- Schroeder, W.J.; Zarge, J.A.; Lorensen, W.E. Decimation of triangle meshes. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques; Association for Computing Machinery: New York, NY, USA; pp. 65–70.
- Rossignac, J.; Borrel, P. Multi-resolution 3D approximations for rendering complex scenes. In Modeling in Computer Graphics; Falcidieno, B., Kunii, T.L., Eds.; Springer: Berlin/Heidelberg, Germany, 1993; pp. 455–465. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, W.; Hu, Y.; Lu, Y. Parametric Surface Modelling for Tea Leaf Point Cloud Based on Non-Uniform Rational Basis Spline Technique. Sensors 2021, 21, 1304. https://doi.org/10.3390/s21041304
Wu W, Hu Y, Lu Y. Parametric Surface Modelling for Tea Leaf Point Cloud Based on Non-Uniform Rational Basis Spline Technique. Sensors. 2021; 21(4):1304. https://doi.org/10.3390/s21041304
Chicago/Turabian StyleWu, Wenchao, Yongguang Hu, and Yongzong Lu. 2021. "Parametric Surface Modelling for Tea Leaf Point Cloud Based on Non-Uniform Rational Basis Spline Technique" Sensors 21, no. 4: 1304. https://doi.org/10.3390/s21041304
APA StyleWu, W., Hu, Y., & Lu, Y. (2021). Parametric Surface Modelling for Tea Leaf Point Cloud Based on Non-Uniform Rational Basis Spline Technique. Sensors, 21(4), 1304. https://doi.org/10.3390/s21041304