
Bridge Damage Detection Approach Using a Roving Camera Technique

 , ,
, ,  , , and
, , and
Abstract
1. Introduction
2. Literature Review
2.1. Damage Detection Methods
2.2. Computer Vision-Based Displacement Measurement Methods
2.2.1. Single Camera Studies on Artificial Targets
2.2.2. Single Camera Studies on Natural Bridge Features
2.2.3. Multiple Camera Studies
3. Materials and Methods
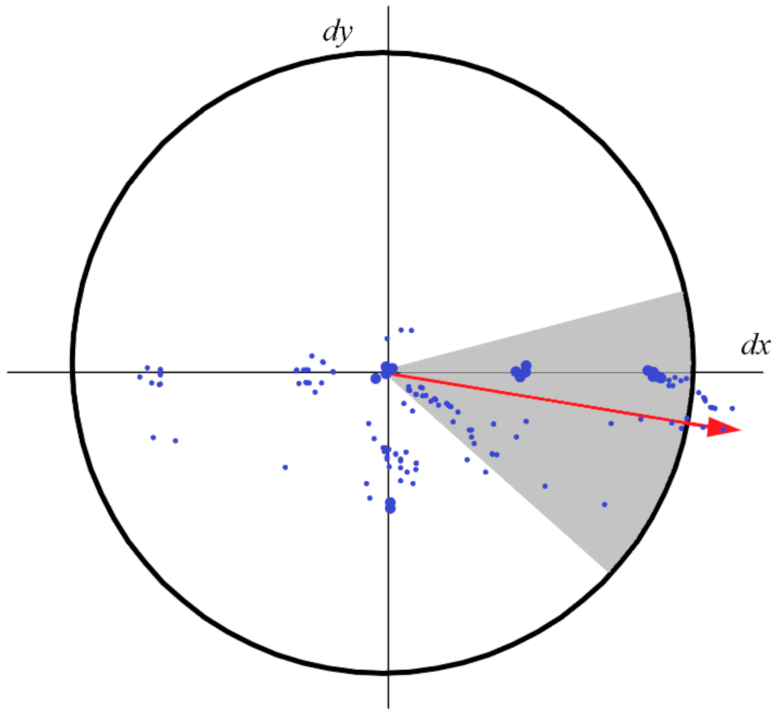
3.1. Details of Algorithm for Displacement Calculation
3.2. Details of the Camera Hardware
3.3. Damage Detection Approach
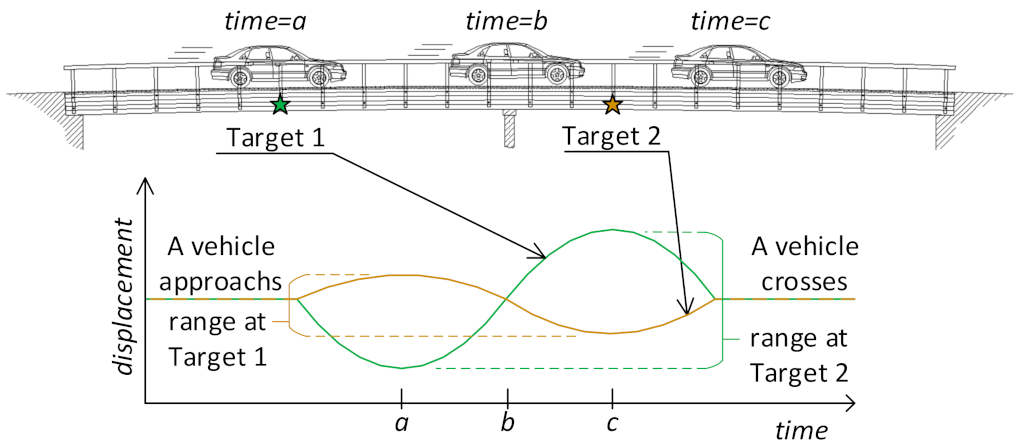
- One camera records displacements of the reference target for each crossing.
- The focus or location of the other monitoring cameras are varied under each vehicle pass event (camera roving).
3.3.1. Method 1
3.3.2. Method 2
3.4. Laboratory Setup
4. Results
4.1. Measurement Pre-Processing
4.2. Result Analysis by Method 1
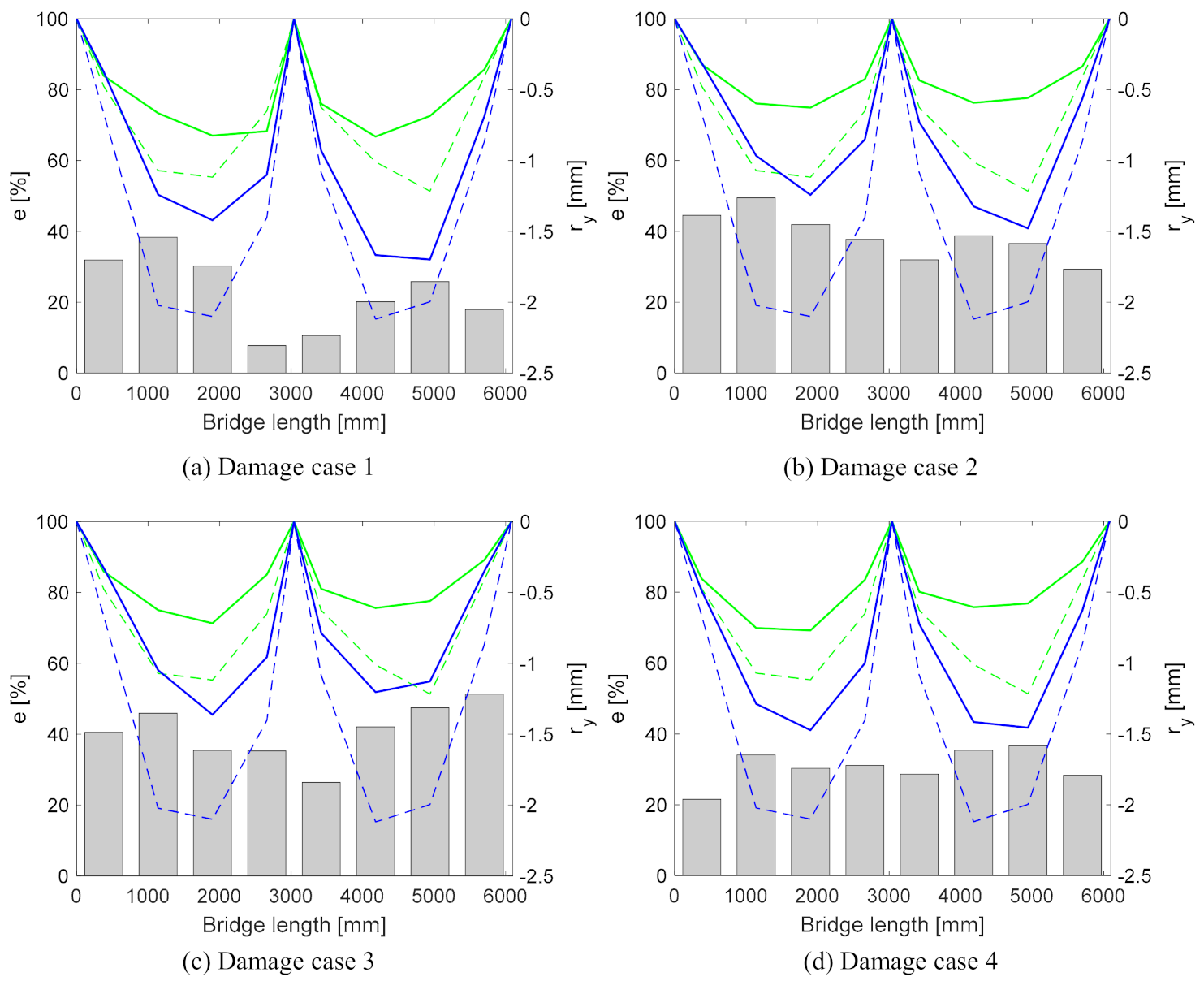
- (a)
- in Damage Case 1, the higher values are closer to the left support, indicating that left support might be damaged.
- (b)
- in Damage Case 2, all of the values are higher than in Damage Case 1. The largest amount of high values are at the left span of the bridge. This could indicate that the bearings at the left support and in the centre are locking.
- (c)
- in Damage Case 3, the smallest values are at the centre, suggesting that the bearings on the left and right supports are damaged.
- (d)
- In Damage Case 4, the smallest values are at left and right supports, hinting that the bearing at the centre of the bridge is damaged.
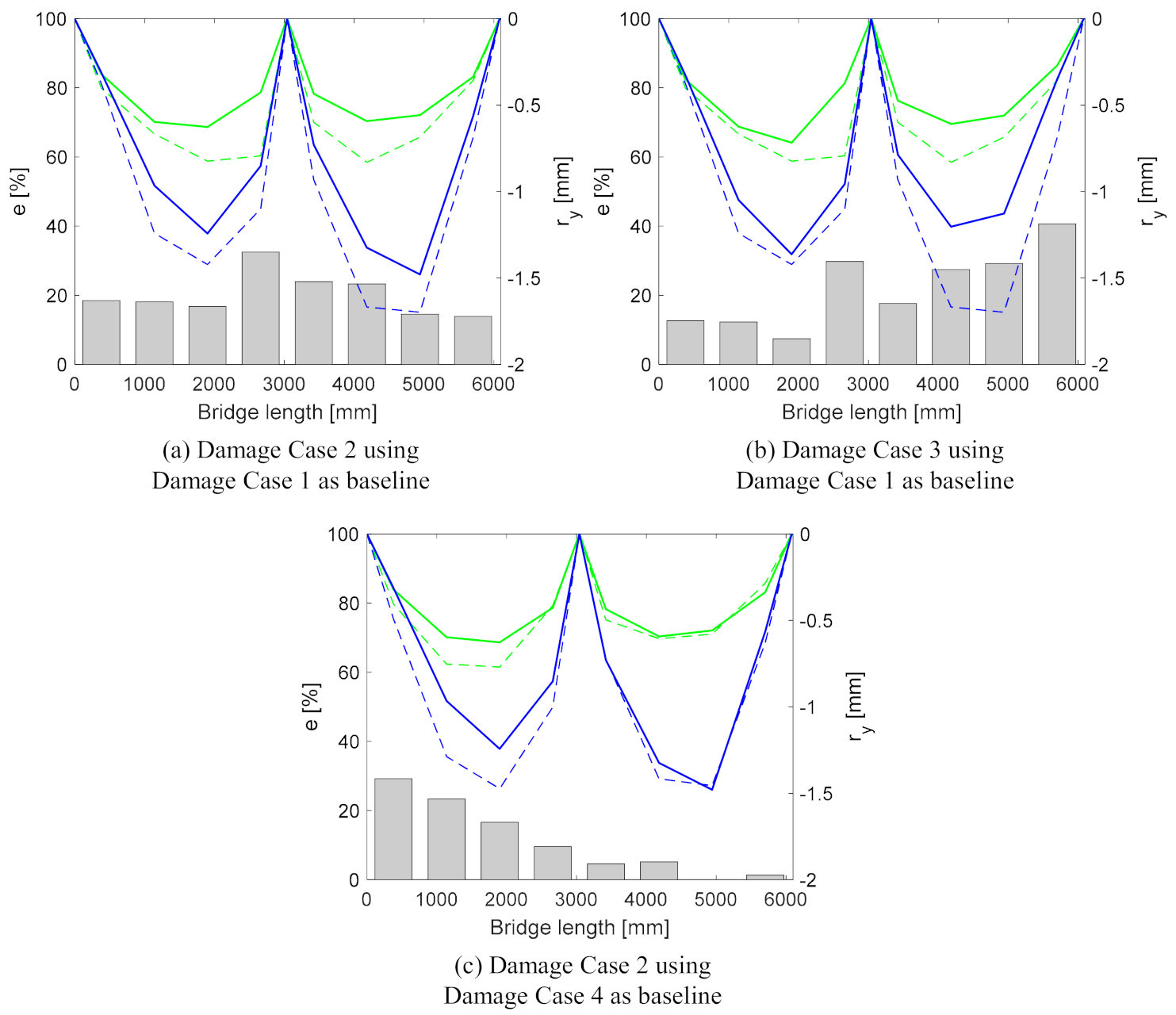
4.3. Result Analysis by Using Method 2
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Phares, B.M.; Washer, G.A.; Rolander, D.D.; Graybeal, B.A.; Moore, M. Routine highway bridge inspection condition documentation accuracy and reliability. J. Bridg. Eng. 2004, 9, 403–413. [Google Scholar] [CrossRef]
- Jensen, J.S.; Sloth, M.; Linneberg, P.; Paulsson, B. Mainline: Maintenance, renewal and improvement of rail transport infrastructure to reduce economic and environmental impacts. In Deliverable D1.1: Benchmark of New Technologies to Extend the Life of Elderly Rail Infrastructure European Project; International Union of Railways: Pairs, France, 2014. [Google Scholar]
- BBC Cumbria Floods Resulted in £276m Bill. Available online: http://www.bbc.co.uk/news/uk-england-cumbria-11791716 (accessed on 10 May 2020).
- BBC Northern Ireland Floods: More than 100 People Rescued-BBC News. Available online: https://www.bbc.co.uk/news/uk-northern-ireland-41019610 (accessed on 2 June 2020).
- Telegraph UK Weather: Bridge Collapses and Roads Washed Away as Flood Warnings Continue to Midnight. Available online: https://www.telegraph.co.uk/news/2019/07/31/uk-weather-met-office-yorkshire-flooding (accessed on 2 June 2020).
- RAIU. Malahide Viaduct Collapse on the Dublin to Belfast Line, on the 21st August 2009; RAIU: Dubin, Republic of Ireland, 2010. [Google Scholar]
- Steve Jones Learning from the Genoa Bridge Collapse|Institution of Civil Engineers. Available online: https://www.ice.org.uk/news-and-insight/the-civil-engineer/january-2019/learning-from-the-genoa-bridge-collapse (accessed on 2 June 2020).
- Italy Bridge Collapse|Photos Reveal Cracks in Deck Grew Over Nine Years Before Catastrophic Failure-New Civil Engineer. Available online: https://www.newcivilengineer.com/latest/italy-bridge-collapse-photos-reveal-cracks-in-deck-grew-over-nine-years-before-catastrophic-failure-15-04-2020 (accessed on 2 June 2020).
- Mori, Y.; Ellingwood, B.R. Reliability-based service-life assessment of aging concrete structures. J. Struct. Eng. 1993, 119, 1600–1621. [Google Scholar] [CrossRef]
- Stewart, M.G.; Rosowsky, D.V.; Val, D.V. Reliability-based bridge assessment using risk-ranking decision analysis. Struct. Saf. 2001, 23, 397–405. [Google Scholar] [CrossRef]
- Val, D.V.; Stewart, M.G.; Melchers, R.E. Life-cycle performance of RC bridges: Probabilistic approach. Comput. Civ. Infrastruct. Eng. 2000, 15, 14–25. [Google Scholar] [CrossRef]
- Furuta, H.; Frangopol, D.M.; Akiyama, M. Life-cycle of structural systems: Design, assessment, maintenance and management. In Proceedings of the Fourth International Symposium on Life-Cycle Civil Engineering; Waseda University; Waseda University: Tokyo, Japan, 2014. [Google Scholar]
- Frangopol, D.M.; Tsompanakis, Y. Maintenance and Safety of Aging Infrastructure; CRC Press: Boca Raton, FL, USA, 2014; Volume 10, ISBN 978-0-415-65942-0. [Google Scholar]
- Kim, S.; Frangopol, D.M.; Soliman, M. Generalized Probabilistic Framework for Optimum Inspection and Maintenance Planning. J. Struct. Eng. 2013, 139, 435–447. [Google Scholar] [CrossRef]
- Casas, J.R.; Moughty, J.J. Bridge Damage Detection Based on Vibration Data: Past and New Developments. Front. Built Environ. 2017, 3, 4. [Google Scholar] [CrossRef]
- Kozin, F.; Natke, H.G. System identification techniques. Struct. Saf. 1986, 3, 269–316. [Google Scholar] [CrossRef]
- Shi, Z.Y.; Law, S.S.; Zhang, L.M. Structural Damage Detection from Modal Strain Energy Change. J. Eng. Mech. 2000, 126, 1216–1223. [Google Scholar] [CrossRef]
- Chen, J.; Xu, Y.L.; Zhang, R.C. Modal parameter identification of Tsing Ma suspension bridge under Typhoon Victor: EMD-HT method. J. Wind Eng. Ind. Aerodyn. 2004, 92, 805–827. [Google Scholar] [CrossRef]
- Nayeri, R.D.; Tasbihgoo, F.; Wahbeh, M.; Caffrey, J.P.; Masri, S.F.; Conte, J.P.; Elgamal, A. Study of Time-Domain Techniques for Modal Parameter Identification of a Long Suspension Bridge with Dense Sensor Arrays. J. Eng. Mech. 2009, 135, 669–683. [Google Scholar] [CrossRef]
- Hart, G.C.; Yao, J.T.P. System Identification in Structural Dynamics. J. Eng. Mech. Div. 1977, 103, 1089–1104. [Google Scholar] [CrossRef]
- Yao, J.T.P.; Natke, H.G. Damage detection and reliability evaluation of existing structures. Struct. Saf. 1994, 15, 3–16. [Google Scholar] [CrossRef]
- Talebinejad, I.; Fischer, C.; Ansari, F. Numerical Evaluation of Vibration-Based Methods for Damage Assessment of Cable-Stayed Bridges. Comput. Civ. Infrastruct. Eng. 2011, 26, 239–251. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. One-year monitoring of the Z24-Bridge: Environmental effects versus damage events. Earthq. Eng. Struct. Dyn. 2001, 30, 149–171. [Google Scholar] [CrossRef]
- Moser, P.; Moaveni, B. Environmental effects on the identified natural frequencies of the Dowling Hall Footbridge. Mech. Syst. Signal. Process. 2011, 25, 2336–2357. [Google Scholar] [CrossRef]
- Wah, W.S.L.; Chen, Y.T.; Roberts, G.W.; Elamin, A. Damage Detection of Structures Subject to Nonlinear Effects of Changing Environmental Conditions. Procedia Eng. 2017, 188, 248–255. [Google Scholar] [CrossRef]
- Santos, J.P.; Crémona, C.; Calado, L.; Silveira, P.; Orcesi, A.D. On-line unsupervised detection of early damage. Struct. Control. Heal. Monit. 2016, 23, 1047–1069. [Google Scholar] [CrossRef]
- Zhu, F.; Wu, Y. A rapid structural damage detection method using integrated ANFIS and interval modeling technique. Appl. Soft Comput. J. 2014, 25, 473–484. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Ni, P. Structural damage identification based on autoencoder neural networks and deep learning. Eng. Struct. 2018, 172, 13–28. [Google Scholar] [CrossRef]
- Dilena, M.; Limongelli, M.P.; Morassi, A. Damage localization in bridges via the FRF interpolation method. Mech. Syst. Signal. Process. 2015, 52–53, 162–180. [Google Scholar] [CrossRef]
- Krishnan, M.; Bhowmik, B.; Hazra, B.; Pakrashi, V. Real time damage detection using recursive principal components and time varying auto-regressive modeling. Mech. Syst. Signal Process. 2018, 101, 549–574. [Google Scholar] [CrossRef]
- Santhosh, K.V.; Roy, B.K. Online implementation of an adaptive calibration technique for displacement measurement using LVDT. Appl. Soft Comput. 2017, 53, 19–26. [Google Scholar] [CrossRef]
- Bhowmik, B.; Tripura, T.; Hazra, B.; Pakrashi, V. Real time structural modal identification using recursive canonical correlation analysis and application towards online structural damage detection. J. Sound Vib. 2020, 468, 5101. [Google Scholar] [CrossRef]
- Zhang, C.; Gao, Y.W.; Huang, J.P.; Huang, J.Z.; Song, G.Q. Damage identification in bridge structures subject to moving vehicle based on extended Kalman filter with /1-norm regularization. Inverse Probl. Sci. Eng. 2020, 28, 144–174. [Google Scholar] [CrossRef]
- Yang, J.N.; Lin, S.; Huang, H.; Zhou, L. An adaptive extended Kalman filter for structural damage identification. Struct. Control Heal. Monit. 2006, 13, 849–867. [Google Scholar] [CrossRef]
- Meiliang, W.; Smyth, A.W. Application of the unscented Kalman filter for real-time nonlinear structural system identification. Struct. Control Heal. Monit. 2007, 14, 971–990. [Google Scholar] [CrossRef]
- Santos, C.A.; Costa, C.O.; Batista, J. A vision-based system for measuring the displacements of large structures: Simultaneous adaptive calibration and full motion estimation. Mech. Syst. Signal Process. 2016, 72, 678–694. [Google Scholar] [CrossRef]
- Cha, Y.J.; Chen, J.G.; Büyüköztürk, O. Output-only computer vision based damage detection using phase-based optical flow and unscented Kalman filters. Eng. Struct. 2017, 132, 300–313. [Google Scholar] [CrossRef]
- Dworakowski, Z.; Kohut, P.; Gallina, A.; Holak, K.; Uhl, T. Vision-based algorithms for damage detection and localization in structural health monitoring. Struct. Control Heal. Monit. 2016, 23, 35–50. [Google Scholar] [CrossRef]
- Shih, M.H.; Sung, W.P. Developing dynamic digital image techniques with continuous parameters to detect structural damage. Sci. World J. 2013, 2013, 3468. [Google Scholar] [CrossRef]
- Wang, G.Q.; Boore, D.M.; Igel, H.; Zhou, X.Y. Some Observations on Colocated and Closely Spaced Strong Ground-Motion Records of the 1999 Chi-Chi, Taiwan, Earthquake. Bull. Seismol. Soc. Am. 2003, 93, 674–693. [Google Scholar] [CrossRef]
- Zhang, Y.; Lie, S.T.; Xiang, Z. Damage detection method based on operating deflection shape curvature extracted from dynamic response of a passing vehicle. Mech. Syst. Signal Process. 2013, 35, 238–254. [Google Scholar] [CrossRef]
- Khuc, T.; Catbas, F.N. Structural Identification Using Computer Vision-Based Bridge Health Monitoring. J. Struct. Eng. 2018, 144, 7202. [Google Scholar] [CrossRef]
- Celik, O.; Terrell, T.; Gul, M.; Catbas, F.N. Sensor clustering technique for practical structural monitoring and maintenance. Struct. Monit. Maint. 2018, 5, 273–295. [Google Scholar]
- Dong, C.Z.; Catbas, F.N. A review of computer vision–based structural health monitoring at local and global levels. Struct. Heal. Monit. 2020, 5585. [Google Scholar] [CrossRef]
- Stephen, G.A.; Brownjohn, J.M.W.; Taylor, C.A. Measurements of static and dynamic displacement from visual monitoring of the Humber Bridge. Eng. Struct. 1993, 15, 197–208. [Google Scholar] [CrossRef]
- Wahbeh, A.M.; Caffrey, J.P.; Masri, S.F. A vision-based approach for the direct measurement of displacements in vibrating systems. Smart Mater. Struct. 2003, 12, 785–794. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. Real-Time Displacement Measurement of a Flexible Bridge Using Digital Image Processing Techniques. Exp. Mech. 2006, 46, 105–114. [Google Scholar] [CrossRef]
- Nassif, H.H.; Gindy, M.; Davis, J. Comparison of laser Doppler vibrometer with contact sensors for monitoring bridge deflection and vibration. NDT E Int. 2005, 38, 213–218. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.Q.; Narita, Y.; Tanaka, T. Vision-Based Displacement Sensor for Monitoring Dynamic Response Using Robust Object Search Algorithm. IEEE Sens. J. 2013, 13, 4725–4732. [Google Scholar] [CrossRef]
- Ullah, F.; Kaneko, S.; Igarishi, S. Orientation Code Matching for Robust Object Search. IEICE Trans. Inf. Syst. 2001, E84–D, 999–1006. [Google Scholar]
- Khuc, T.; Catbas, F.N. Completely contactless structural health monitoring of real-life structures using cameras and computer vision. Struct. Control Heal. Monit. 2017, 24, 1852. [Google Scholar] [CrossRef]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. FREAK: Fast retina keypoint. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 510–517. [Google Scholar] [CrossRef]
- Kromanis, R.; Xu, Y.; Lydon, D.; del Rincon, M.J.; Habaibeh, A.A. Measuring structural deformations in the laboratory environment using smartphones. Front. Built Environ. 2019, 5. [Google Scholar] [CrossRef]
- Fukuda, Y.; Feng, M.Q.; Shinozuka, M. Cost-effective vision-based system for monitoring dynamic response of civil engineering structures. Struct. Control Health Monit. 2010, 17, 918–936. [Google Scholar] [CrossRef]
- Park, J.W.; Lee, J.J.; Jung, H.J.; Myung, H. Vision-based displacement measurement method for high-rise building structures using partitioning approach. NDT E Int. 2010, 43, 642–647. [Google Scholar] [CrossRef]
- Ho, H.N.; Lee, J.H.; Park, Y.S.; Lee, J.J. A Synchronized Multipoint Vision-Based System for Displacement Measurement of Civil Infrastructures. Sci. World J. 2012, 2012, 1–9. [Google Scholar] [CrossRef]
- Lydon, D.; Lydon, M.; Del Rincon, J.M.; Taylor, S.E.; Robinson, D.; O’Brien, E.; Catbas, F.N. Development and field testing of a time-synchronized system for multi-point displacement calculation using low-cost wireless vision-based sensors. IEEE Sens. J. 2018, 18, 9744–9754. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Model Updating of Railway Bridge Using In Situ Dynamic Displacement Measurement under Trainloads. J. Bridg. Eng. 2015, 20, 5019. [Google Scholar] [CrossRef]
- Gamache, R.; Bell, S.E. Non-intrusive Digital Optical Means to Develop Bridge Performance Information. In Proceedings of the Non-Destructive Testing in Civil Engineering, Nantes, France, 30 June–3 July 2009; pp. 1–6. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Brown, M.; Lowe, D. Invariant Features from Interest Point Groups. In Proceedings of the British Machine Vision Conference, Cardiff University, Cardiff, UK, 2–5 September 2002; pp. 23.1–23.10. [Google Scholar]
- Papageorgiou, C.P.; Oren, M.; Poggio, T. A General framework for object detection. In Sixth International Conference on Computer Vision; Narosa Publishing House: New Delhi, India, 1998; pp. 555–562. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2004; ISBN 9780511811685. [Google Scholar]
- Lydon, D.; Lydon, M.; Taylor, S.; Del Rincon, J.M.; Hester, D.; Brownjohn, J. Development and field testing of a vision-based displacement system using a low cost wireless action camera. Mech. Syst. Signal Process. 2019, 121, 343–358. [Google Scholar] [CrossRef]
- GoPro. Available online: https://gopro.com/content/dam/help/hero4-black/music-bundle-manuals/UM_H4Black-Music_ENG_REVB_WEB.pdf (accessed on 20 December 2020).
- Back-Bone. Available online: https://www.back-bone.ca/product/ribcage-air-hero4-mod-kit/ (accessed on 20 December 2020).
- Computar E5Z2518C-MP. Manual Iris: Megapixel Varifocal Lenses: Products Megapixel, FA, HD, Varifocal-Computar. Available online: https://computar.com/product/1118/ (accessed on 20 December 2020).
- Timecode Systems. SyncBac Pro Home. Available online: https://www.timecodesystems.com/products-home/syncbac-pro/ (accessed on 20 December 2020).
- Zaurin, R.; Catbas, F. Structural health monitoring using video stream, influence lines, and statistical analysis. Struct. Heal. Monit. 2010, 10, 309–332. [Google Scholar] [CrossRef]
- Dong, C.Z.; Celik, O.; Catbas, F.N.; O’Brien, E.; Taylor, S. A robust vision-based method for displacement measurement under adverse environmental factors using Spatio-Temporal context learning and Taylor approximation. Sensors 2019, 19, 3197. [Google Scholar] [CrossRef] [PubMed]
- Lydon, M.; Taylor, S.E.; Doherty, C.; Robinson, D.; O’Brien, E.J.; Žnidarič, A. Bridge weigh-in-motion using fibre optic sensors. Proc. Inst. Civ. Eng. Bridg. Eng. 2017, 170. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Run | Ref. Node | Roved Node | Roved Node | Roved Node |
|---|---|---|---|---|
| 1 | 1 | 2 | 3 | 4 |
| 2 | 1 | 5 | 6 | 7 |
| 3 | 1 | 8 | 9 | 10 |
| 4 | 1 | 11 | 12 | 13 |
| 5 | 1 | 14 | 15 | 16 |
| Baseline | 0.476 | 0.0049 | 1.0% | 0.067 | 0.0048 | 7.2% |
| Damage case 1 | 0.403 | 0.0036 | 0.9% | 0.043 | 0.0038 | 8.7% |
| Damage case 2 | 0.322 | 0.0068 | 2.1% | 0.063 | 0.0053 | 8.5% |
| Damage case 3 | 0.352 | 0.0049 | 1.4% | 0.026 | 0.0041 | 15.8% |
| Damage case 4 | 0.405 | 0.0087 | 2.1% | 0.167 | 0.0044 | 2.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lydon, D.; Lydon, M.; Kromanis, R.; Dong, C.-Z.; Catbas, N.; Taylor, S. Bridge Damage Detection Approach Using a Roving Camera Technique. Sensors 2021, 21, 1246. https://doi.org/10.3390/s21041246
Lydon D, Lydon M, Kromanis R, Dong C-Z, Catbas N, Taylor S. Bridge Damage Detection Approach Using a Roving Camera Technique. Sensors. 2021; 21(4):1246. https://doi.org/10.3390/s21041246
Chicago/Turabian StyleLydon, Darragh, Myra Lydon, Rolands Kromanis, Chuan-Zhi Dong, Necati Catbas, and Su Taylor. 2021. "Bridge Damage Detection Approach Using a Roving Camera Technique" Sensors 21, no. 4: 1246. https://doi.org/10.3390/s21041246
APA StyleLydon, D., Lydon, M., Kromanis, R., Dong, C.-Z., Catbas, N., & Taylor, S. (2021). Bridge Damage Detection Approach Using a Roving Camera Technique. Sensors, 21(4), 1246. https://doi.org/10.3390/s21041246