
An Optimal Routing Algorithm for Unmanned Aerial Vehicles




Abstract
1. Introduction
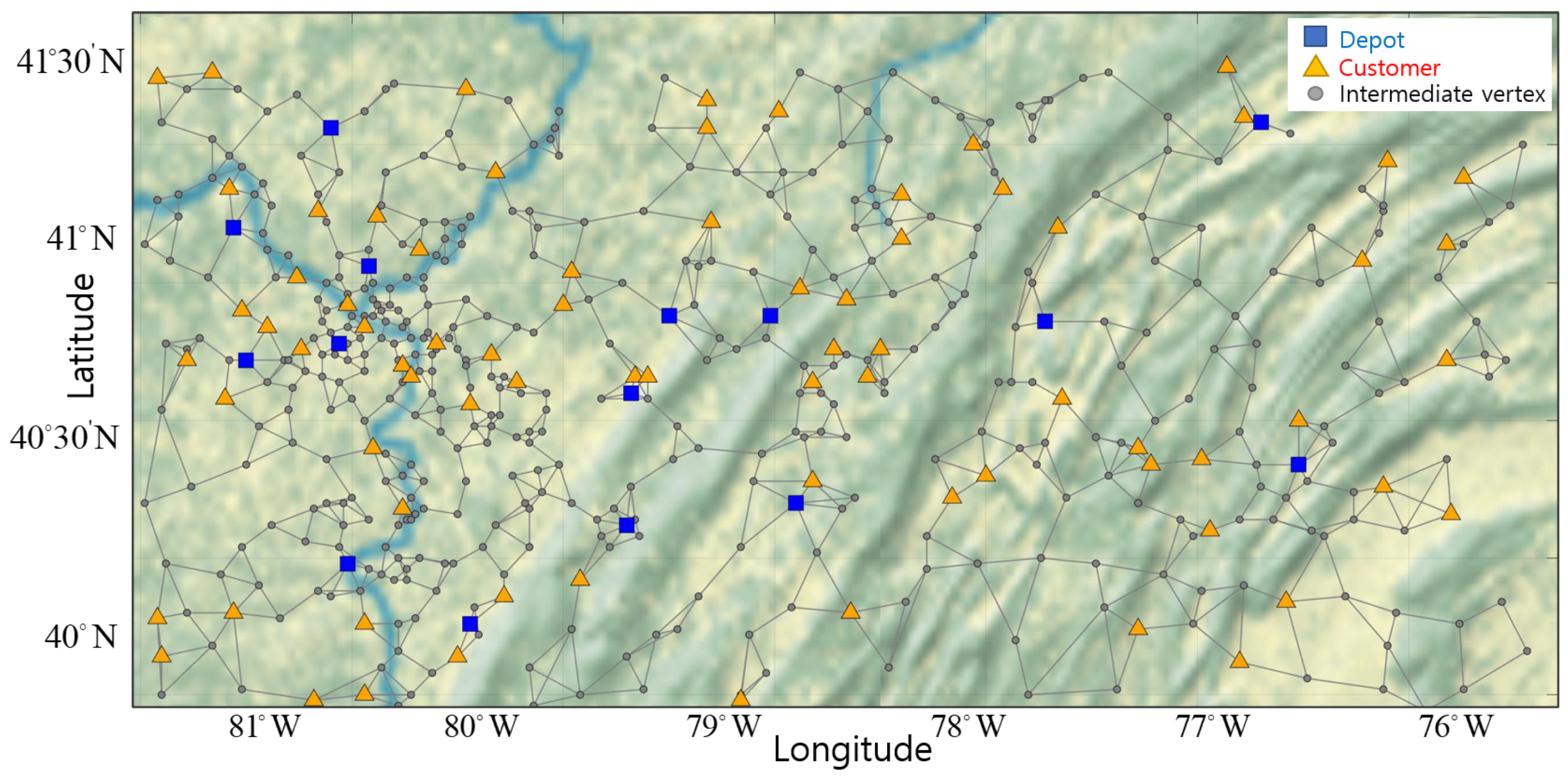
- We configure a virtual network to implement a realistic UAV delivery system.
- We optimize the number of UAVs in service per depot to minimize a fixed cost.
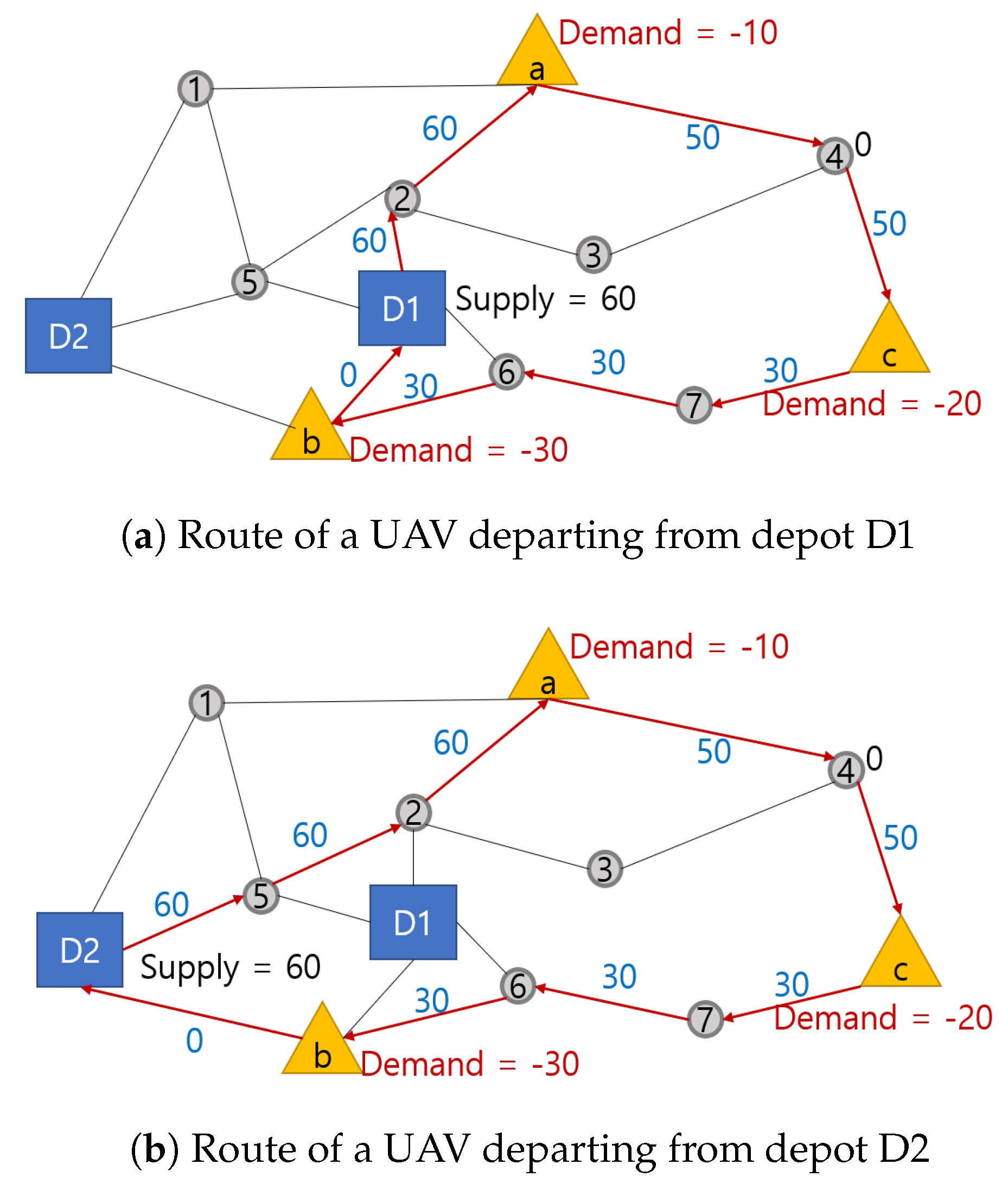
- We find optimal routes for serving UAVs considering the physical limits of UAVs.
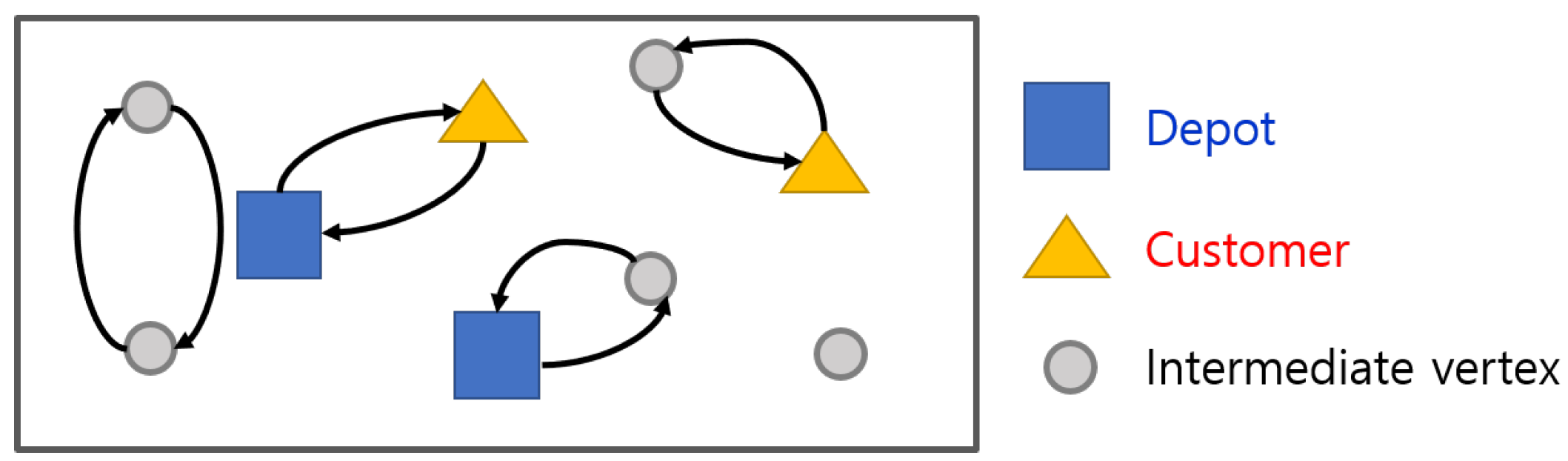
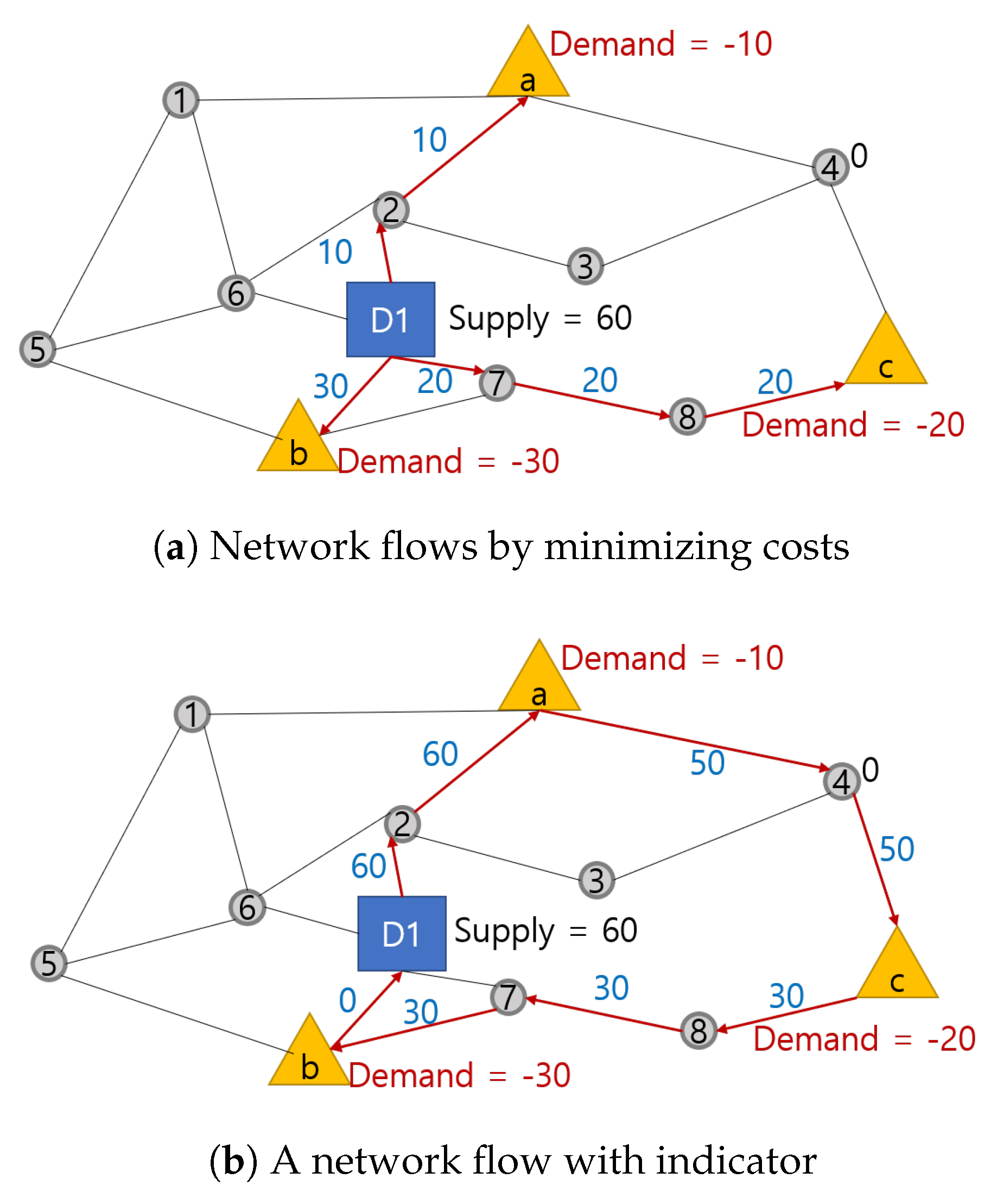
- We eliminate subtours using flow variables in subtour eliminating constraints.
- We allocate UAVs to customers while solving vehicle routing problems.
2. Unmanned Aerial Vehicles Routing
2.1. A Virtual Network for UAVs
- The vertices set is denoted by , where , and .
- The depots set is denoted by p, where , .
- The customers set is denoted by d, where , .
- The set of UAVs belonging to depot p is denoted by , where .
- The set of all UAVs is K denoted by k, where , , .
- The set of edges is , where , , .
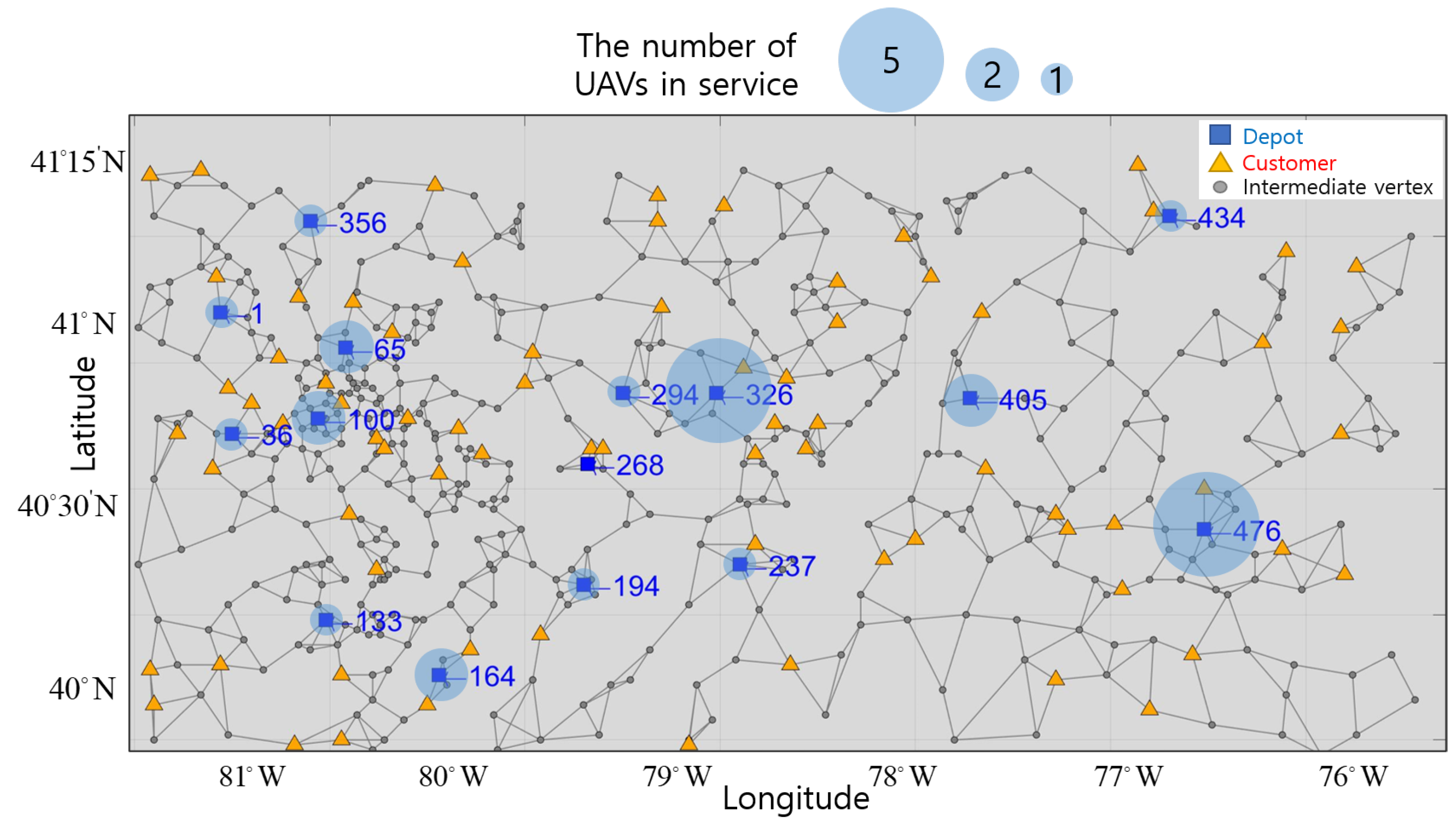
2.2. Assigning UAVs in Service
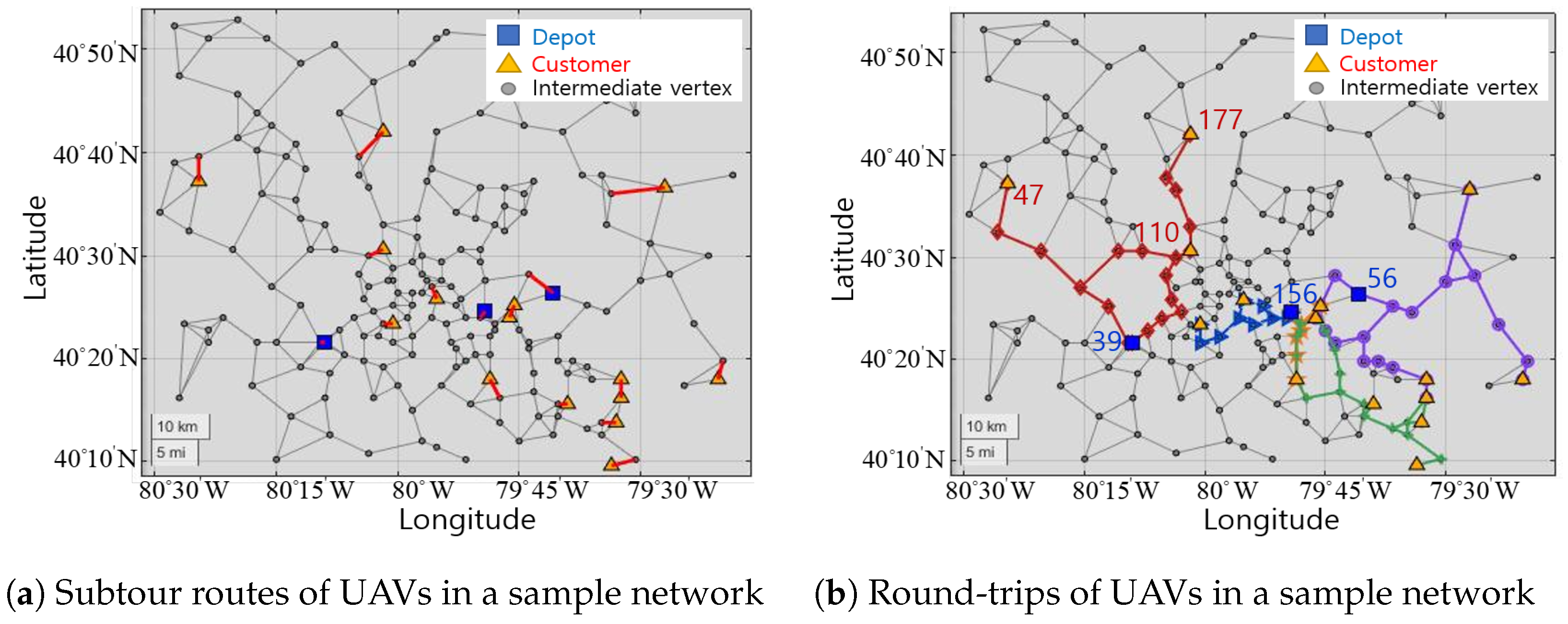
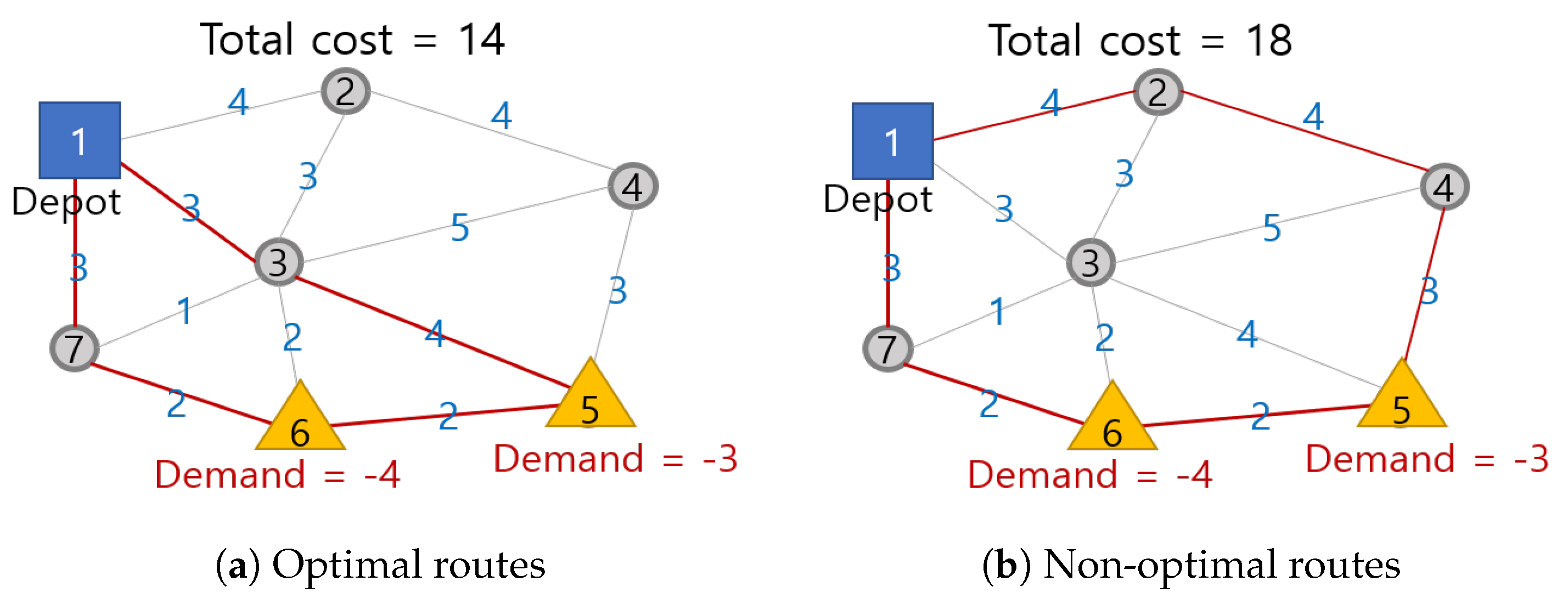
2.3. Eliminating Subtours
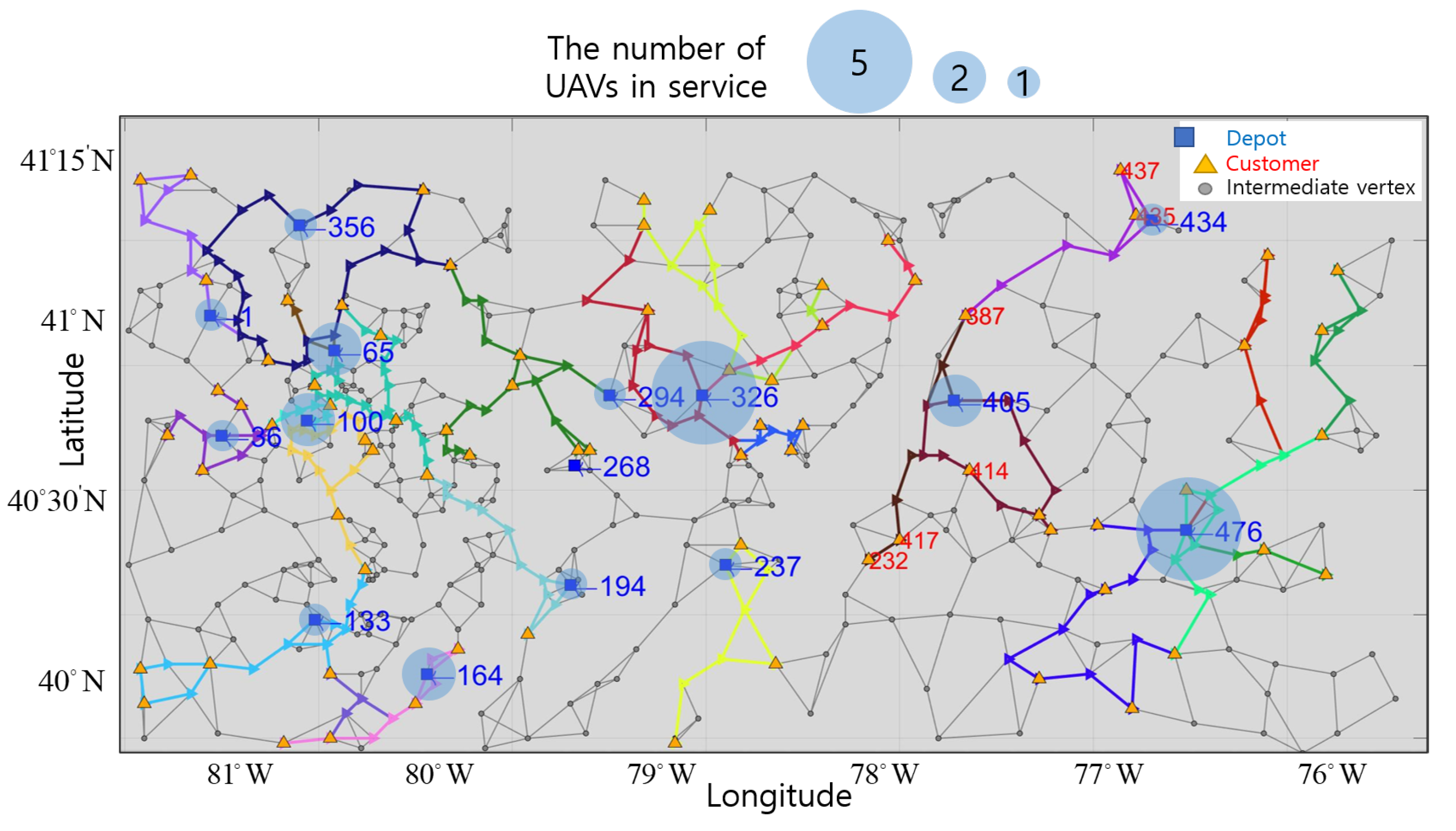
2.4. Allocating and Routing UAVs
3. Computational Results
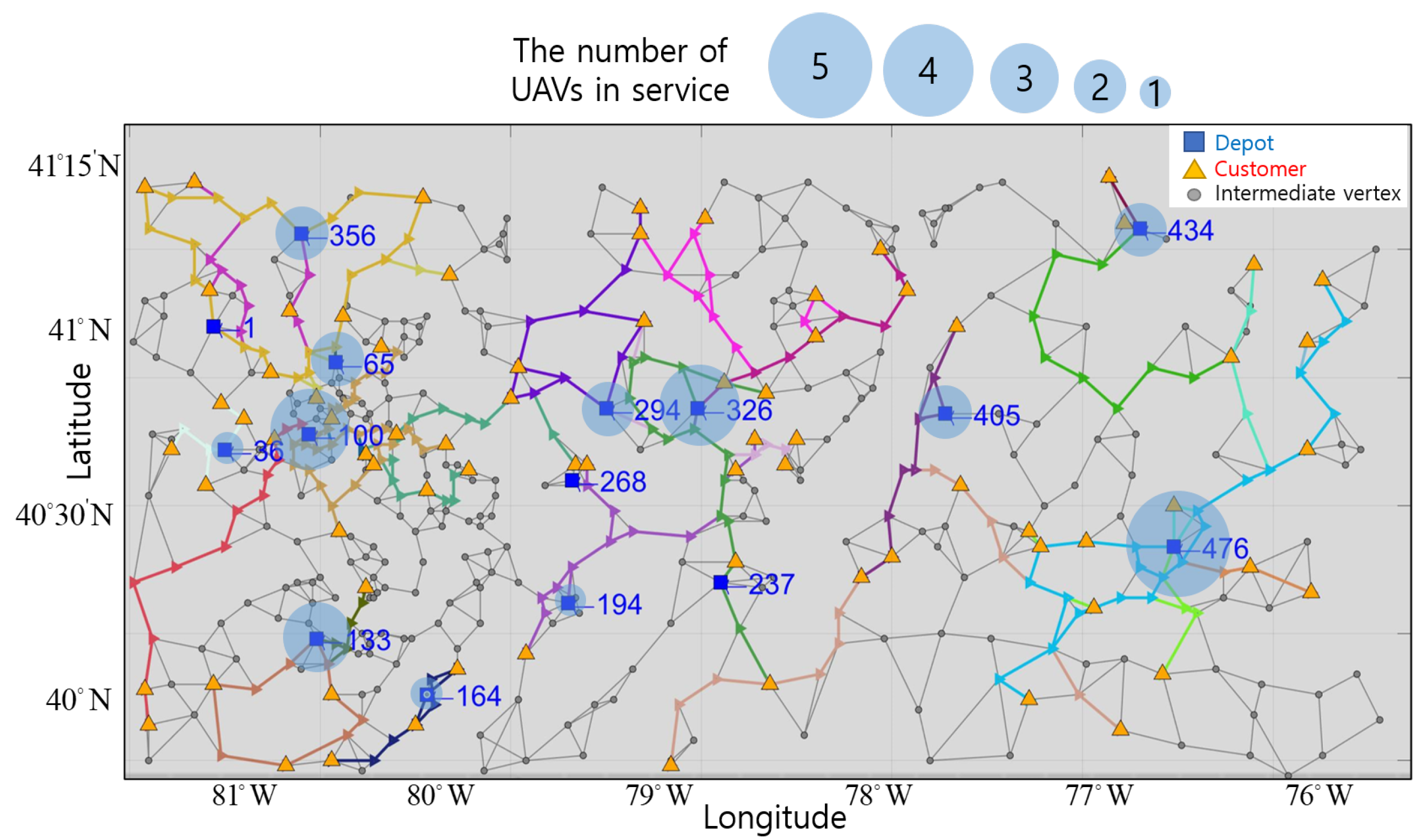
3.1. UAVs in Service by Depot
3.2. Round-Trip Routes of UAVs in Service
3.3. UAV Allocation for Delivery
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Indices and Index Sets: | |
| Index of vertices, where , | |
| p | Index of depots, where , |
| d | Index of customers, where , |
| Index of UAVs registered in a pth depot, where , | |
| k | Index of UAVs, where , |
| Paramaters: | |
| A cost proportional to a distance between a vertex i and a vertex j | |
| A demand quantity of the dth customer | |
| Decision Variables: | |
| The number of trips, where the kth UAV moves from a vertex i to a vertex j | |
| The quantity of goods delivered by the kth UAV from a vertex i to a vertex j | |
| Total incoming and outgoing goods to a vertex i delivered by the kth UAV | |
| A decision variable for the kth UAV, which indicates whether the UAV is used or not | |
References
- Singireddy, S.R.R.; Daim, T.U. Technology Roadmap: Drone Delivery–Amazon Prime Air. In Infrastructure and Technology Management; Springer: Berlin, Germany, 2018; pp. 387–412. [Google Scholar]
- Shafqat, W.; Byun, Y.C. Enabling “Untact” Culture via Online Product Recommendations: An Optimized Graph-CNN based Approach. Appl. Sci. 2020, 10, 5445. [Google Scholar] [CrossRef]
- Welch, A. A Cost-Benefit Analysis of Amazon Prime Air. Ph.D. Thesis, University of Tennessee at Chattanooga, Chattanooga, TN, USA, 2015. [Google Scholar]
- Bhatti, A.; Akram, H.; Basit, H.M.; Khan, A.U.; Raza, S.M.; Naqvi, M.B. E-commerce trends during COVID-19 Pandemic. Int. J. Future Gener. Commun. Netw. 2020, 13, 1449–1452. [Google Scholar]
- Wang, Z.; Sheu, J.B. Vehicle routing problem with drones. Transp. Res. Part B Methodol. 2019, 122, 350–364. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Zhen, L.; Li, M.; Laporte, G.; Wang, W. A vehicle routing problem arising in unmanned aerial monitoring. Comput. Oper. Res. 2019, 105, 1–11. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y. A Time-Varying Lookahead Distance of ILOS Path Following for Unmanned Surface Vehicle. J. Electr. Eng. Technol. 2020, 15, 2267–2278. [Google Scholar] [CrossRef]
- Alotaibi, K.A.; Rosenberger, J.M.; Mattingly, S.P.; Punugu, R.K.; Visoldilokpun, S. Unmanned aerial vehicle routing in the presence of threats. Comput. Ind. Eng. 2018, 115, 190–205. [Google Scholar] [CrossRef]
- Hiermann, G.; Puchinger, J.; Ropke, S.; Hartl, R.F. The electric fleet size and mix vehicle routing problem with time windows and recharging stations. Eur. J. Oper. Res. 2016, 252, 995–1018. [Google Scholar] [CrossRef]
- Lahyani, R.; Coelho, L.C.; Renaud, J. Alternative formulations and improved bounds for the multi-depot fleet size and mix vehicle routing problem. Or Spectr. 2018, 40, 125–157. [Google Scholar] [CrossRef]
- Harary, F.; Nash-Williams, C.S.J. On eulerian and hamiltonian graphs and line graphs. Can. Math. Bull. 1965, 8, 701–709. [Google Scholar] [CrossRef]
- Lim, A.; Wang, F. Multi-depot vehicle routing problem: A one-stage approach. IEEE Trans. Autom. Sci. Eng. 2005, 2, 397–402. [Google Scholar] [CrossRef]
- Mao, H.; Shi, J.; Zhou, Y.; Zhang, G. The Electric Vehicle Routing Problem With Time Windows and Multiple Recharging Options. IEEE Access 2020, 8, 114864–114875. [Google Scholar] [CrossRef]
- Ramos, T.R.P.; Gomes, M.I.; Póvoa, A.P.B. Multi-depot vehicle routing problem: A comparative study of alternative formulations. Int. J. Logist. Res. Appl. 2020, 23, 103–120. [Google Scholar] [CrossRef]
- Gulczynski, D.; Golden, B.; Wasil, E. The multi-depot split delivery vehicle routing problem: An integer programming-based heuristic, new test problems, and computational results. Comput. Ind. Eng. 2011, 61, 794–804. [Google Scholar] [CrossRef]
- Sung, I.; Nielsen, P. Zoning a service area of unmanned aerial vehicles for package delivery services. J. Intell. Robot. Syst. 2020, 97, 719–731. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative routing problem for ground vehicle and unmanned aerial vehicle: The application on intelligence, surveillance, and reconnaissance missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Available online: https://www.aimms.com/ (accessed on 8 February 2021).
- Gong, Y.J.; Zhang, J.; Liu, O.; Huang, R.Z.; Chung, H.S.H.; Shi, Y.H. Optimizing the vehicle routing problem with time windows: A discrete particle swarm optimization approach. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2011, 42, 254–267. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The Vehicle Routing Problem; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar]
- Kara, I. Arc based integer programming formulations for the distance constrained vehicle routing problem. In Proceedings of the 3rd IEEE International Symposium on Logistics and Industrial informatics, Budapest, Hungary, 25–27 August 2011; pp. 33–38. [Google Scholar]
- Ahuja, R.K.; Magnanti, T.L.; Orlin, J.B. Network Flows; Massachusetts Institute Of Technology: Cambridge, MA, USA, 1988. [Google Scholar]
- Archetti, C.; Speranza, M.G. Vehicle routing problems with split deliveries. Int. Trans. Oper. Res. 2012, 19, 3–22. [Google Scholar] [CrossRef]
- Rais, A.; Alvelos, F.; Carvalho, M.S. New mixed integer-programming model for the pickup-and-delivery problem with transshipment. Eur. J. Oper. Res. 2014, 235, 530–539. [Google Scholar] [CrossRef]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Preprints 2018, 2018110601. [Google Scholar] [CrossRef]
- Chen, Y.; Baek, D.; Bocca, A.; Macii, A.; Macii, E.; Poncino, M. A case for a battery-aware model of drone energy consumption. In Proceedings of the 2018 IEEE International Telecommunications Energy Conference (INTELEC), Turin, Italy, 7–11 October 2018; pp. 1–8. [Google Scholar]
- Baek, D.; Chen, Y.; Bocca, A.; Bottaccioli, L.; Di Cataldo, S.; Gatteschi, V.; Pagliari, D.J.; Patti, E.; Urgese, G.; Chang, N.; et al. Battery-aware operation range estimation for terrestrial and aerial electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5471–5482. [Google Scholar] [CrossRef]
- Baek, D.; Chen, Y.; Chang, N.; Macii, E.; Poncino, M. Energy-Efficient Coordinated Electric Truck-Drone Hybrid Delivery Service Planning. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Williams, H.P. Model Building in Mathematical Programming; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicles in Service | Physical Obstacles | # of Depots | Intermediate Vertices | Assigned UAVs per Customer | |
|---|---|---|---|---|---|
| [5] | 2-Truck, 1-UAV | x | 1-Depot | x | Single UAV |
| [6] | N-UAV | x | 1-Depot | x | Single UAV |
| [7] | 1-UAV | o | 1-Depot | x | Single UAV |
| [8] | N-UAV | x | M-Depot | x | Single UAV |
| [9] | 1-UAV | o | 1-Depot | o | Single UAV |
| [10] | N-UAV | x | M-Depot | x | Single UAV |
| [11] | N-UAV | x | M-Depot | x | Single UAV |
| [13] | N-UAV | x | M-Depot | x | Single UAV |
| [14] | N-UAV | x | 1-Depot | x | Single UAV |
| [15] | N-UAV | x | M-Depot | o | Multiple UAVs |
| [16] | N-UAV | x | M-Depot | x | Multiple UAVs |
| [17] | N-UAV | x | M-Depot | x | Single UAV |
| [18] | N-UAV | x | 1-Depot | x | Multiple UAVs |
| Present paper | N-UAV | o | M-Depot | o | Multiple UAVs |
| Network Flow | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Vertices Number | 39 | 44 | 65 | 15 | 28 | 47 | 28 | 15 | 65 | 59 | 106 | 83 | 110 | 116 |
| Loaded | 15 | 15 | 15 | 15 | 15 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 2 | 2 |
| Demand quantities | 0 | 0 | 0 | 0 | 0 | 10 | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 0 |
| Vertices Number | 54 | 8 | 177 | 8 | 54 | 116 | 110 | 83 | 71 | 86 | 101 | 58 | 75 | 39 |
| Loaded | 2 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Demand quantities | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Depot Number | 36 | 100 | 133 | 476 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Vehicles Number | 9 | 18 | 19 | 25 | 71 | 72 | 73 | 74 | 75 | |
| Loading quantity [kg] | 15 | 15 | 15 | 15 | 15 | 12 | 15 | 15 | 15 | |
| Moving distance [km] | 60.5 | 41.2 | 62.3 | 94.0 | 45.2 | 109.0 | 54.4 | 83.8 | 83.0 | |
| Customers | Demands | Delivered quantities | ||||||||
| 22 | 1 | - | - | 1 | - | - | - | - | - | - |
| 45 | 9 | - | - | 9 | - | - | - | - | - | - |
| 72 | 10 | - | 6 | 4 | - | - | - | - | - | - |
| 78 | 7 | 2 | 5 | - | - | - | - | - | - | - |
| 87 | 4 | - | 4 | - | - | - | - | - | - | - |
| 171 | 2 | - | - | 1 | 1 | - | - | - | - | - |
| 290 | 8 | - | - | - | - | - | 8 | - | - | - |
| 297 | 2 | - | - | - | - | - | - | 2 | - | - |
| 305 | 1 | - | - | - | - | - | 1 | - | - | - |
| 314 | 7 | - | - | - | - | - | - | - | 7 | - |
| 320 | 9 | - | - | - | - | 7 | 2 | - | - | - |
| 325 | 2 | - | - | - | - | 2 | - | - | - | - |
| 338 | 8 | - | - | - | - | - | - | 8 | - | - |
| 343 | 2 | - | - | - | - | 2 | - | - | - | - |
| 350 | 4 | - | - | - | - | 4 | - | - | - | - |
| 352 | 3 | - | - | - | - | - | - | 3 | - | - |
| 380 | 9 | - | - | - | - | - | 1 | - | 8 | - |
| 393 | 10 | - | - | - | - | - | - | - | - | 10 |
| 399 | 5 | - | - | - | - | - | - | - | - | 5 |
| 403 | 2 | - | - | - | - | - | - | 2 | - | - |
| Depots Number | UAVs in Service | Moving Distance | Total Cost |
|---|---|---|---|
| 1 | 1 | 79.05 | 179.05 |
| 36 | 1 | 60.52 | 160.52 |
| 65 | 2 | 113.57 | 313.57 |
| 100 | 2 | 103.53 | 303.53 |
| 133 | 1 | 93.98 | 193.98 |
| 164 | 2 | 111.16 | 311.16 |
| 194 | 1 | 65.77 | 165.77 |
| 237 | 1 | 74.1 | 174.1 |
| 268 | 0 | 0 | 0 |
| 294 | 1 | 129.31 | 229.31 |
| 326 | 5 | 375.26 | 875.26 |
| 356 | 1 | 106.8 | 206.8 |
| 405 | 2 | 154.93 | 354.93 |
| 434 | 1 | 73.78 | 173.78 |
| 476 | 5 | 451.96 | 951.96 |
| Cost | 2600 | 1993.72 | 4593.72 |
| Depots Number | UAVs in Service | Moving Distance | Total Cost |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 36 | 1 | 43.81 | 143.81 |
| 65 | 2 | 126.31 | 326.31 |
| 100 | 4 | 238.45 | 638.45 |
| 133 | 3 | 197.76 | 497.76 |
| 164 | 1 | 37.16 | 137.16 |
| 194 | 1 | 50.84 | 150.84 |
| 237 | 0 | 0 | 0 |
| 268 | 0 | 0 | 0 |
| 294 | 2 | 162.10 | 362.10 |
| 326 | 4 | 393.31 | 793.31 |
| 356 | 2 | 159.25 | 359.25 |
| 405 | 2 | 115.74 | 315.74 |
| 434 | 2 | 122.82 | 322.82 |
| 476 | 5 | 401.66 | 901.66 |
| Cost | 2900 | 2049.22 | 4949.22 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Kwak, J.H.; Oh, B.; Lee, D.-H.; Lee, D. An Optimal Routing Algorithm for Unmanned Aerial Vehicles. Sensors 2021, 21, 1219. https://doi.org/10.3390/s21041219
Kim S, Kwak JH, Oh B, Lee D-H, Lee D. An Optimal Routing Algorithm for Unmanned Aerial Vehicles. Sensors. 2021; 21(4):1219. https://doi.org/10.3390/s21041219
Chicago/Turabian StyleKim, Sooyeon, Jae Hyun Kwak, Byoungryul Oh, Da-Han Lee, and Duehee Lee. 2021. "An Optimal Routing Algorithm for Unmanned Aerial Vehicles" Sensors 21, no. 4: 1219. https://doi.org/10.3390/s21041219
APA StyleKim, S., Kwak, J. H., Oh, B., Lee, D.-H., & Lee, D. (2021). An Optimal Routing Algorithm for Unmanned Aerial Vehicles. Sensors, 21(4), 1219. https://doi.org/10.3390/s21041219