
An Optimum Deployment Algorithm of Camera Networks for Open-Pit Mine Slope Monitoring



Abstract
1. Introduction
2. Materials and Methods
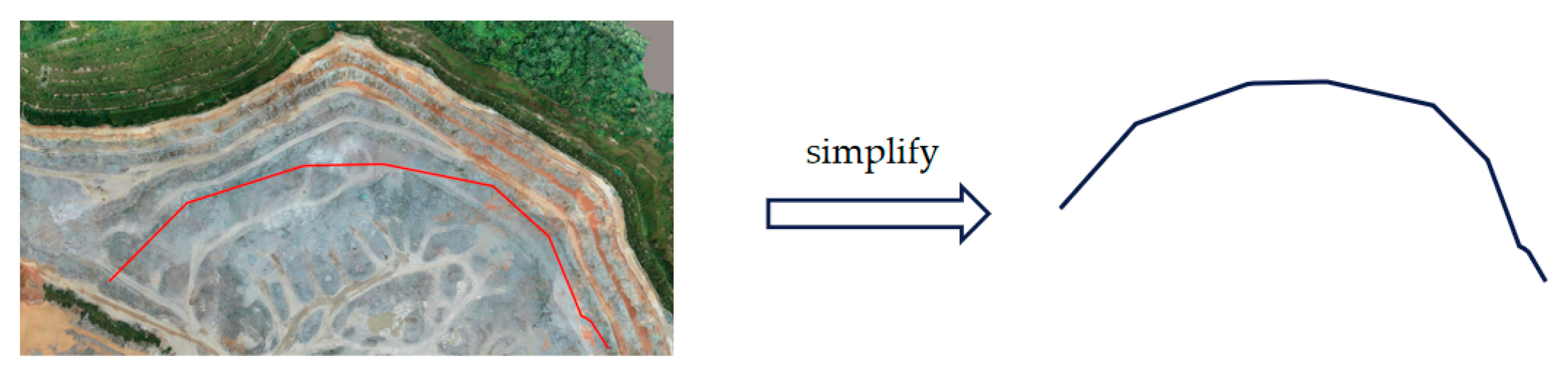
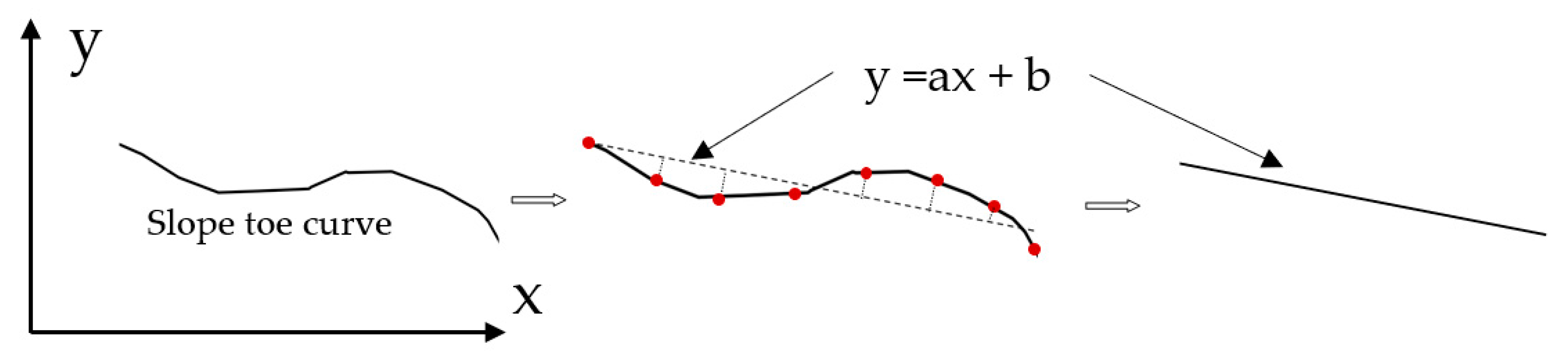
2.1. Description of Targets and Criteria for Monitoring
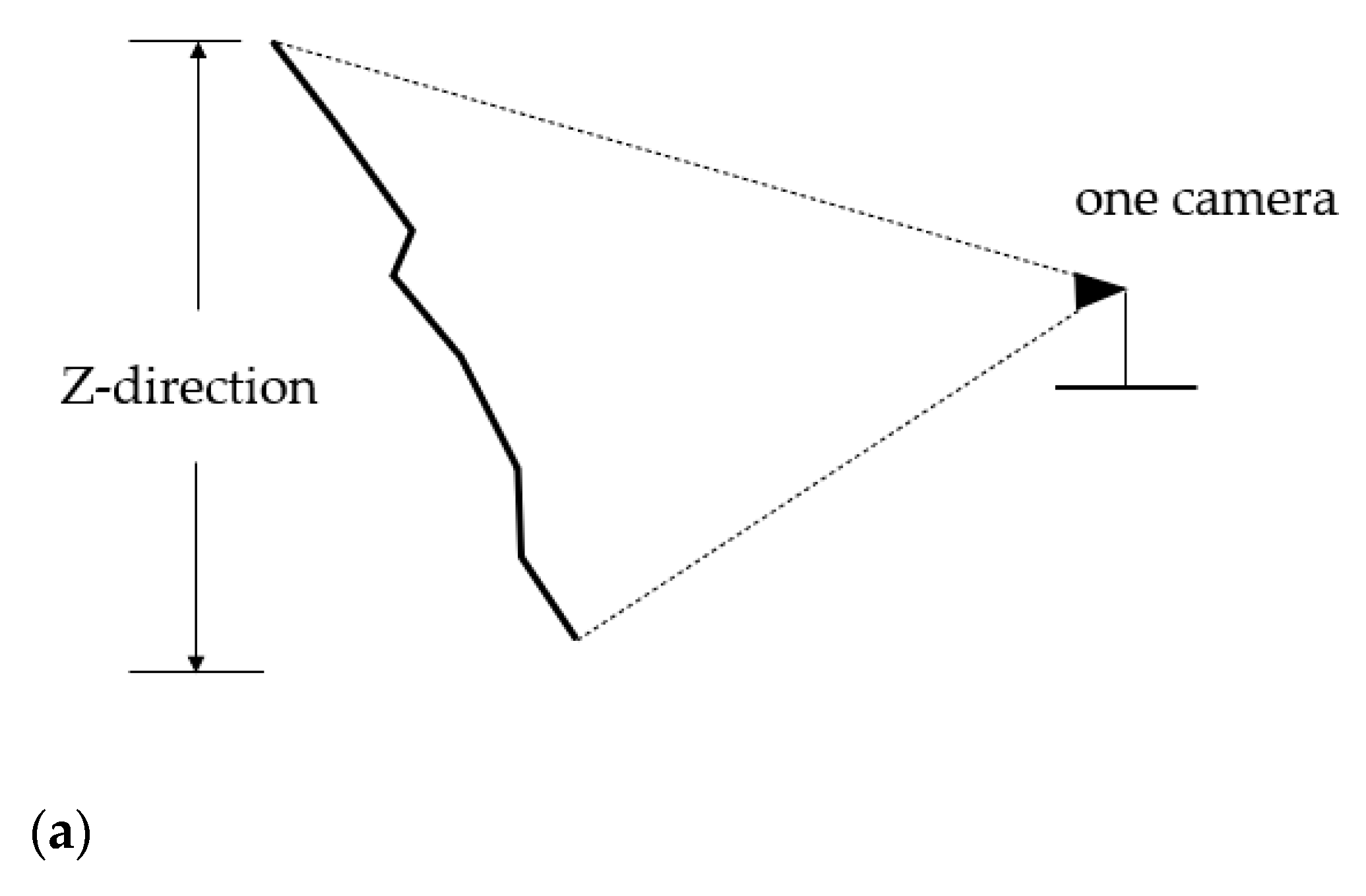
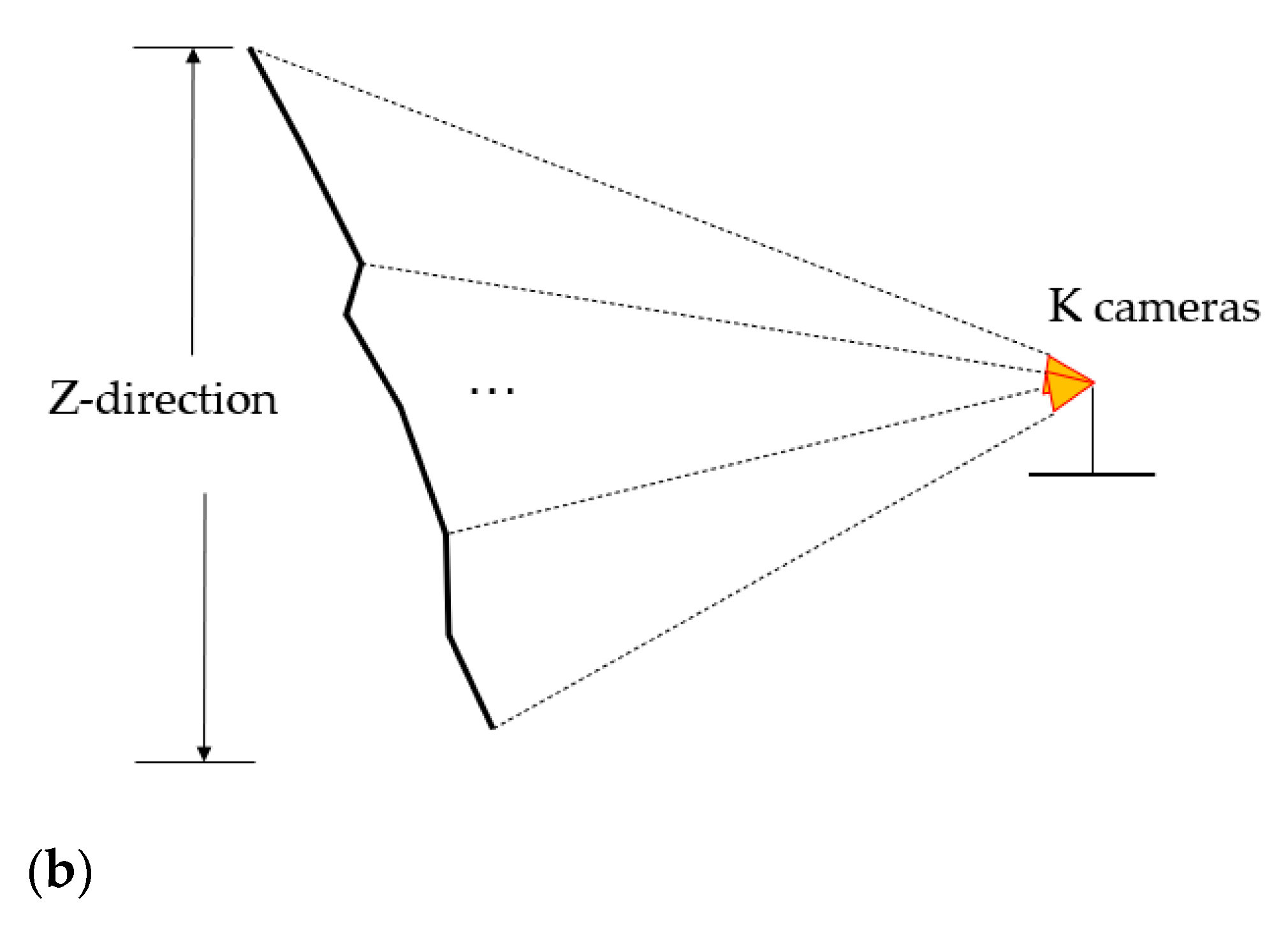
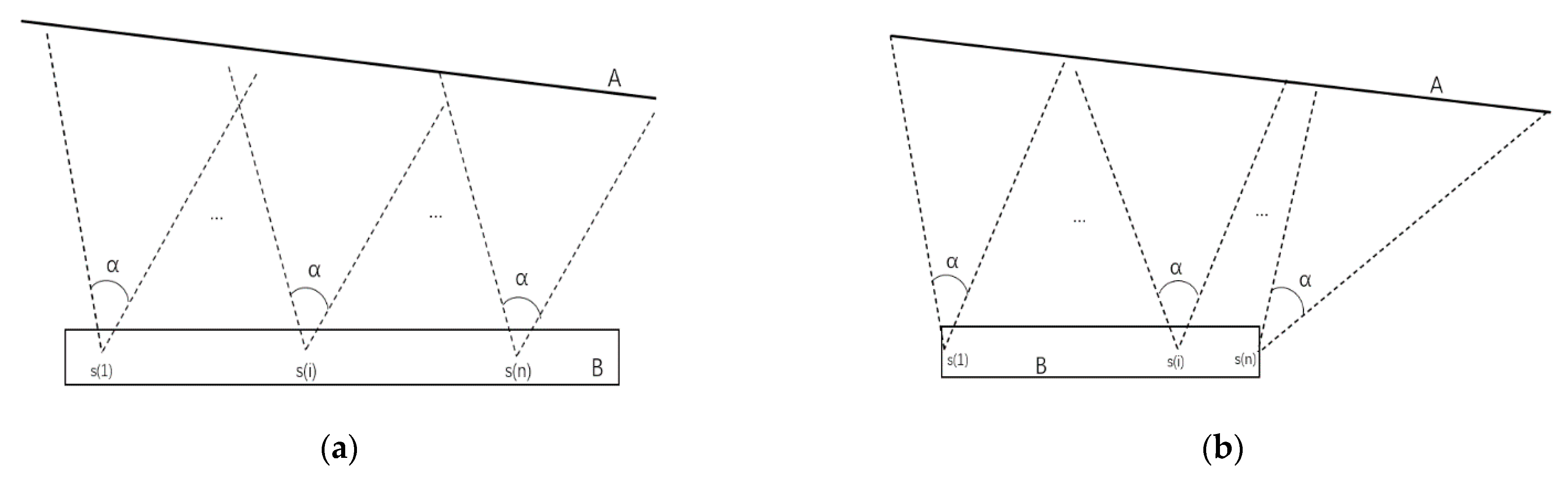
2.2. Model Description and Problem Definition
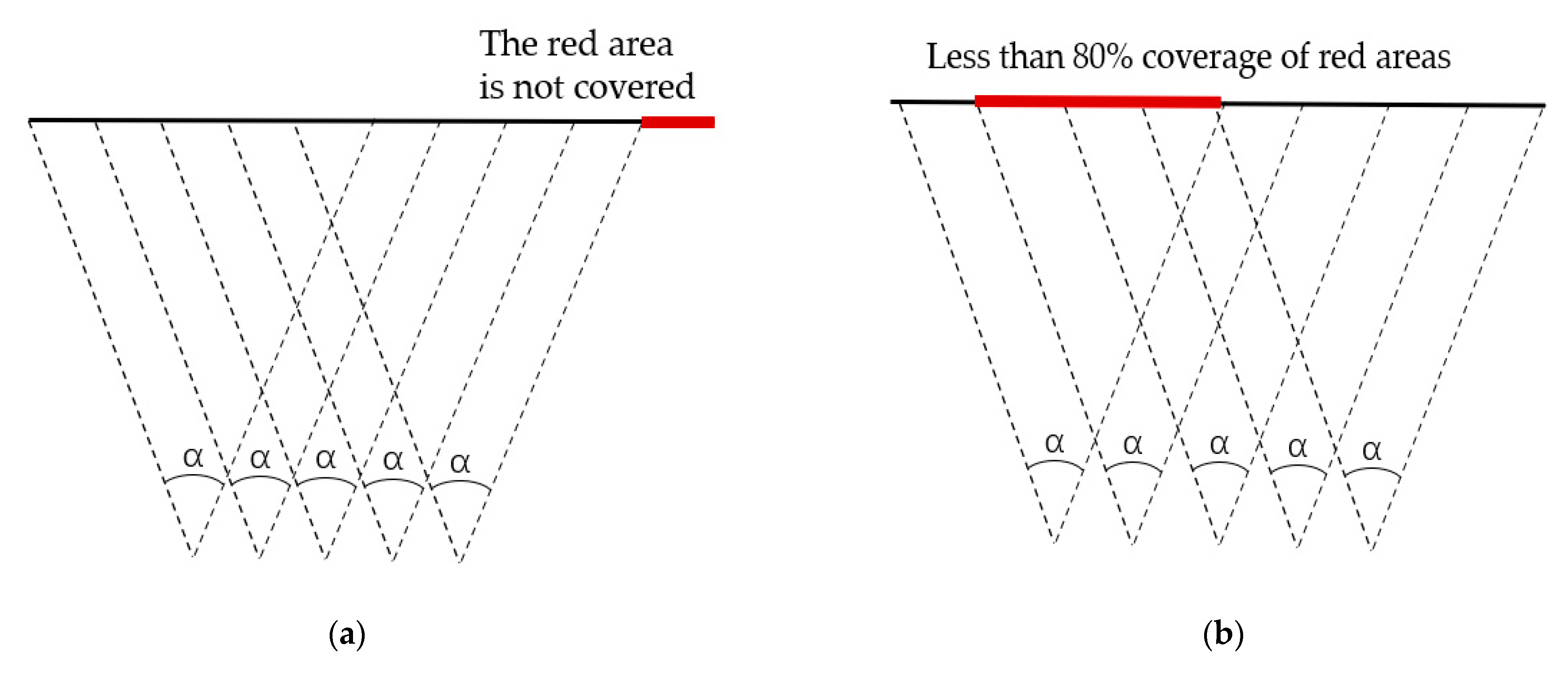
2.3. Discussion of Different Situations
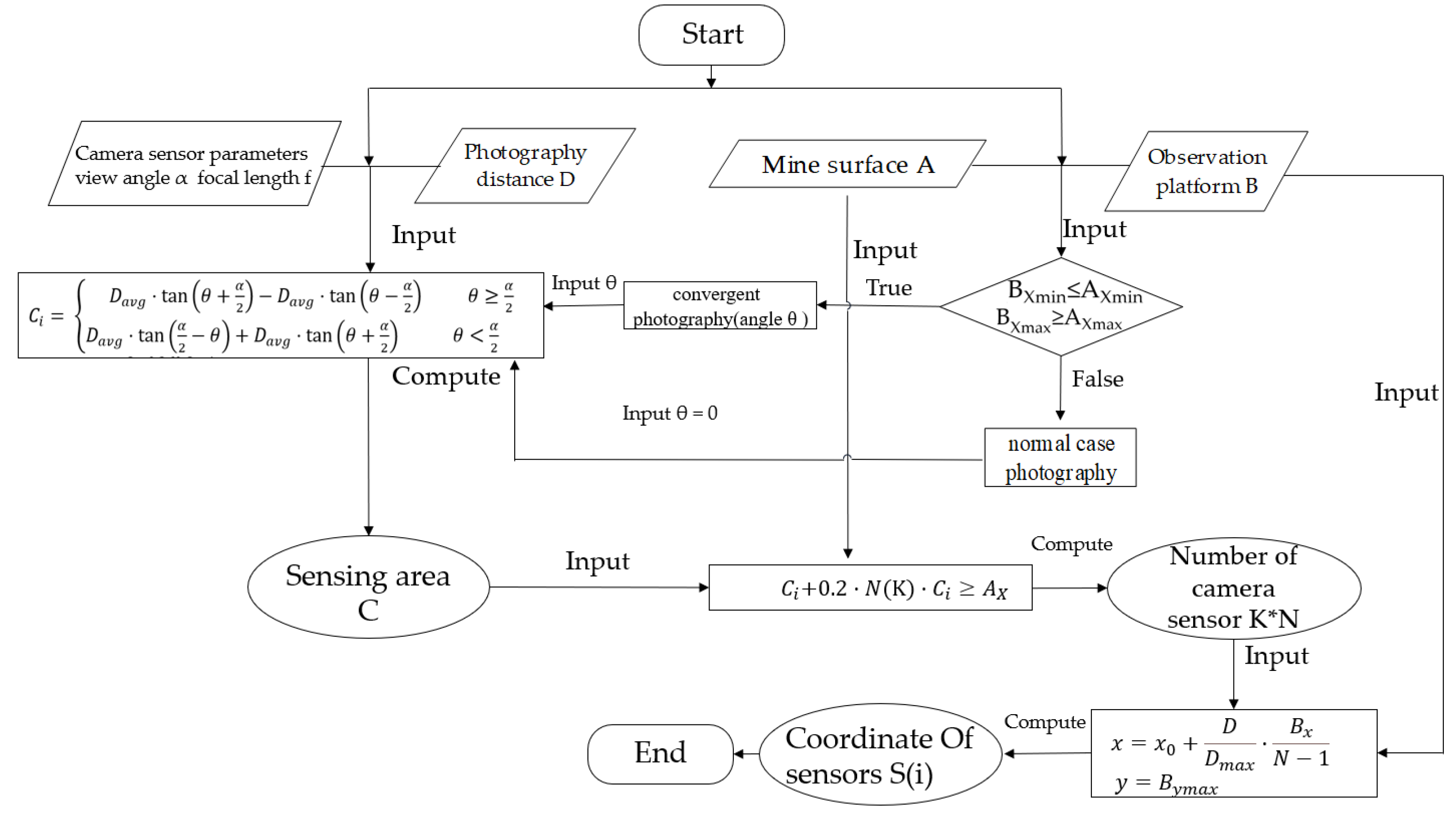
2.4. The Optimum Deployment Algorithm
| Algorithm 1. OCD4M |
| Require: |
| Camera sensor set , target surface , Observation platform , Photography distance , sensing angle |
| Ensure: |
| A is covered by the set of , and the degree of overlap of adjacent greater than 80%. (1) ; (2) ; (3) . |
| Process: |
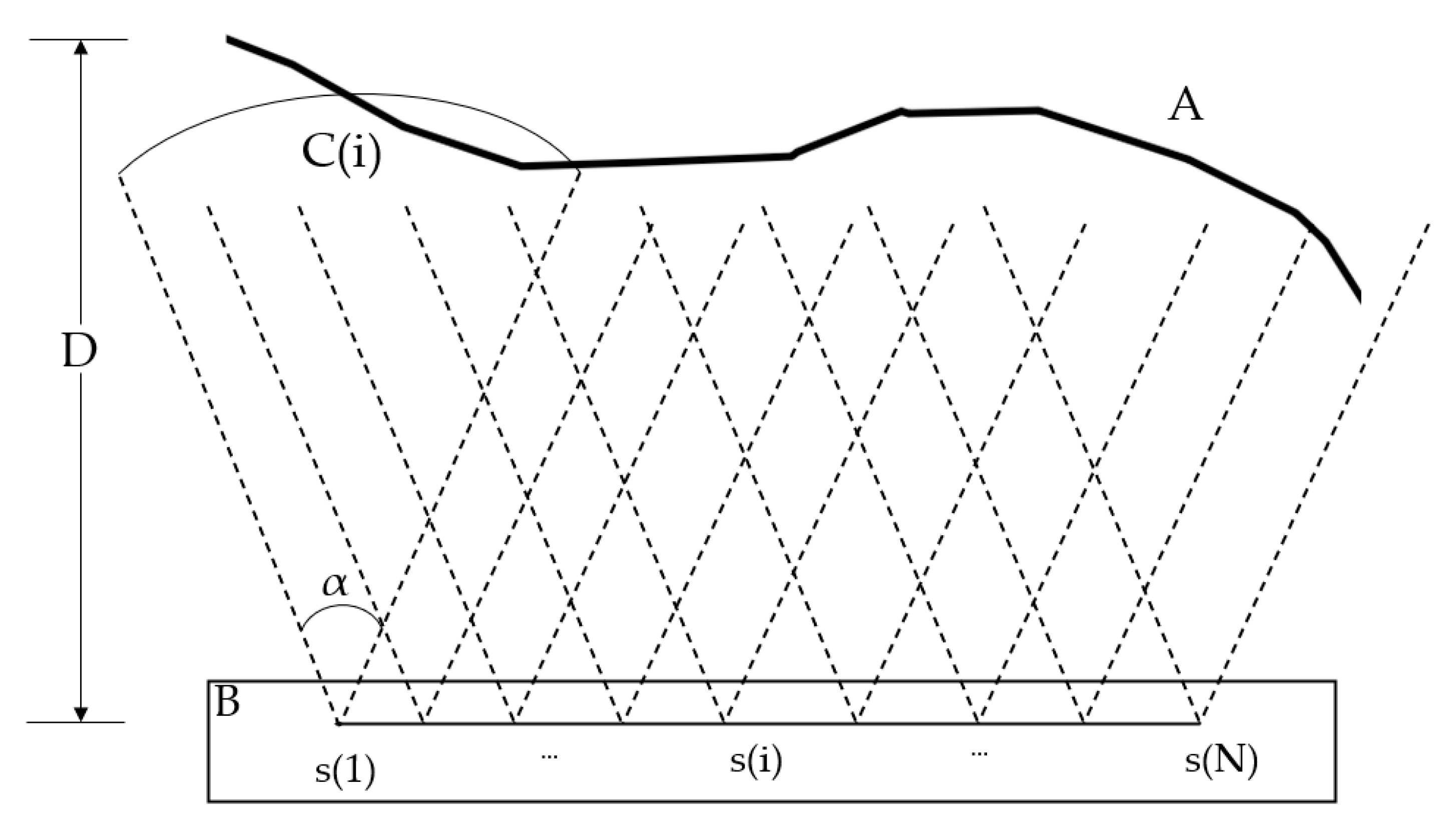
| 1: Compute the range of A. , |
| 2: Compute the range of B. , |
| 3: Compute the rang of Ci, |
| 4: Whether to cover the Z direction of Mine Surface A |
| 5: while do |
| 6: get the number of camera sensors at each point |
| 7: K++ |
| 8: End while |
| 9: Judge the Length relationship of A and B |
| 10: If () do |
| 11: normal case photography, compute the minimum of camera sensors by Formula (9): |
| 12: Compute the coordinate of each camera sensor according to the photography |
| 13: distance by Equation (11), |
| 14: , |
| 15: Else |
| 16: convergent photography (angle ); |
| 17: compute the range of camera sensor number by |
| 18: Equations (9)–(11), |
| 19: we can get K, N and |
| 20: End If |
| 21: Return number () and position of sensor |
3. Implementation and Results
3.1. Simulation of Experimental Tests
- Camera parametersSensor size: 1/3” inches (4.8 mm × 3.6 mm)Focal length: 8 mm
- Ore surface parameters= 100 m= 500 m
- Observation platform parameter= 500 m
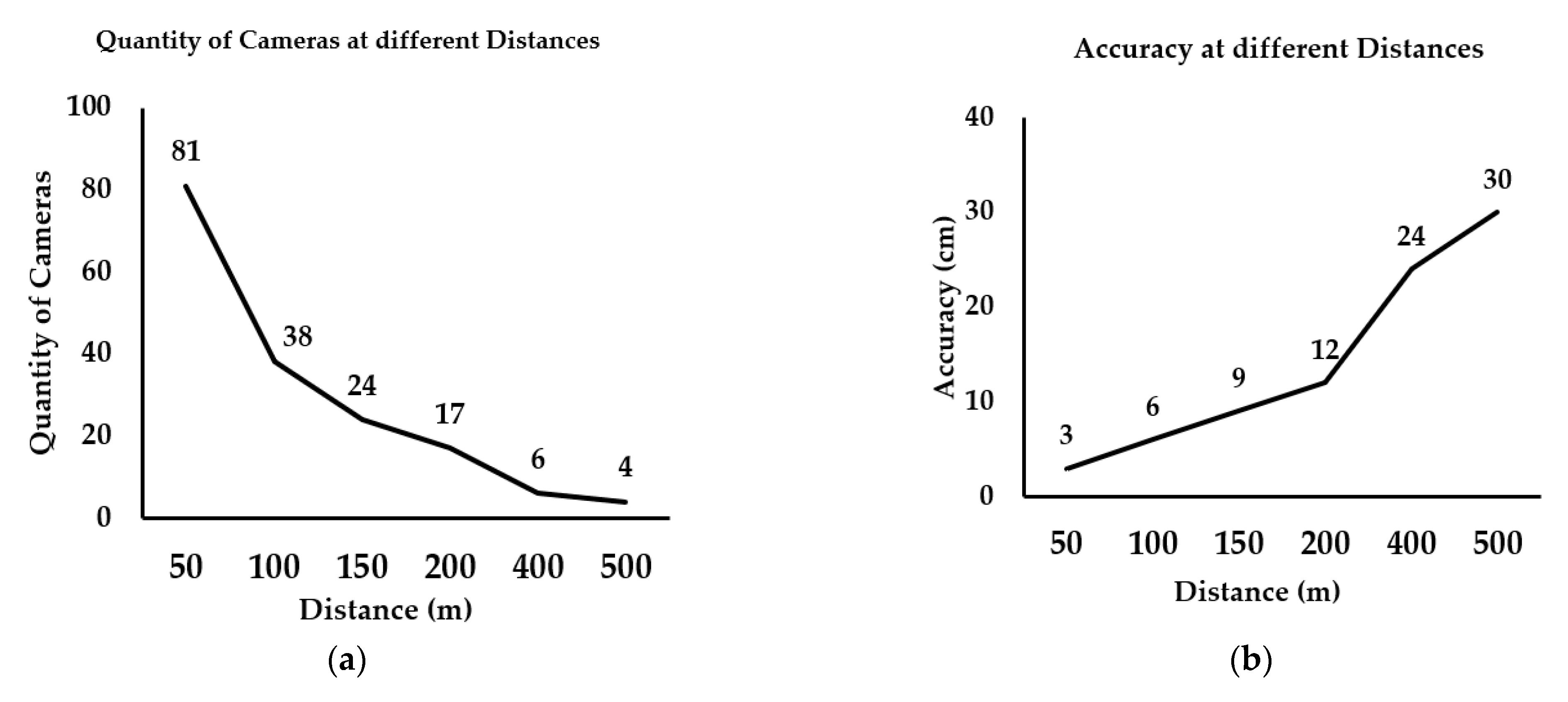
3.1.1. Quantity and Precision Analysis
3.1.2. Focal length, Field of View Angle and Quantity Analysis
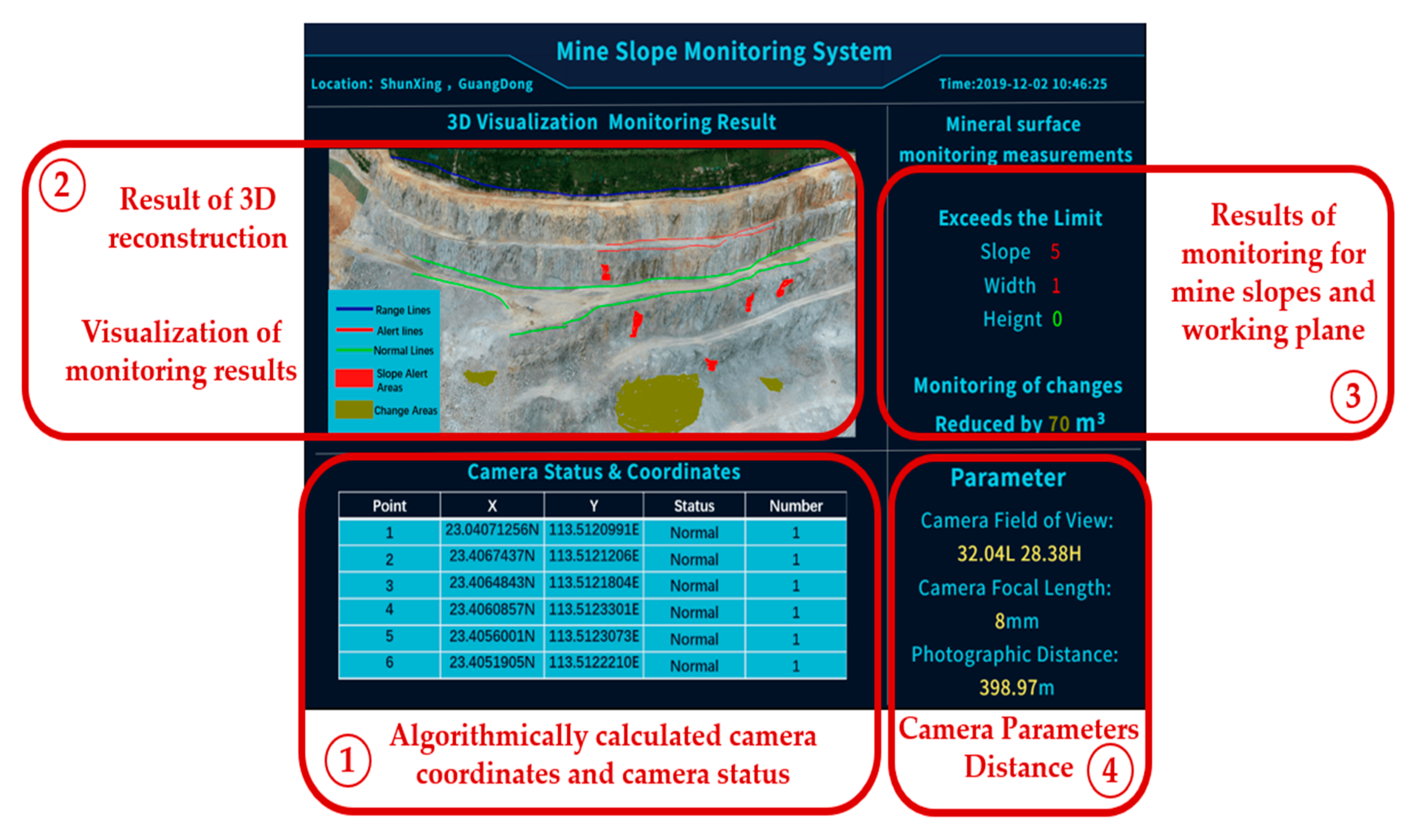
3.2. Field Testing and Demonstration
- The modular ① shows the number of camera points and their coordinates calculated by the algorithm and also indicates the camera status.
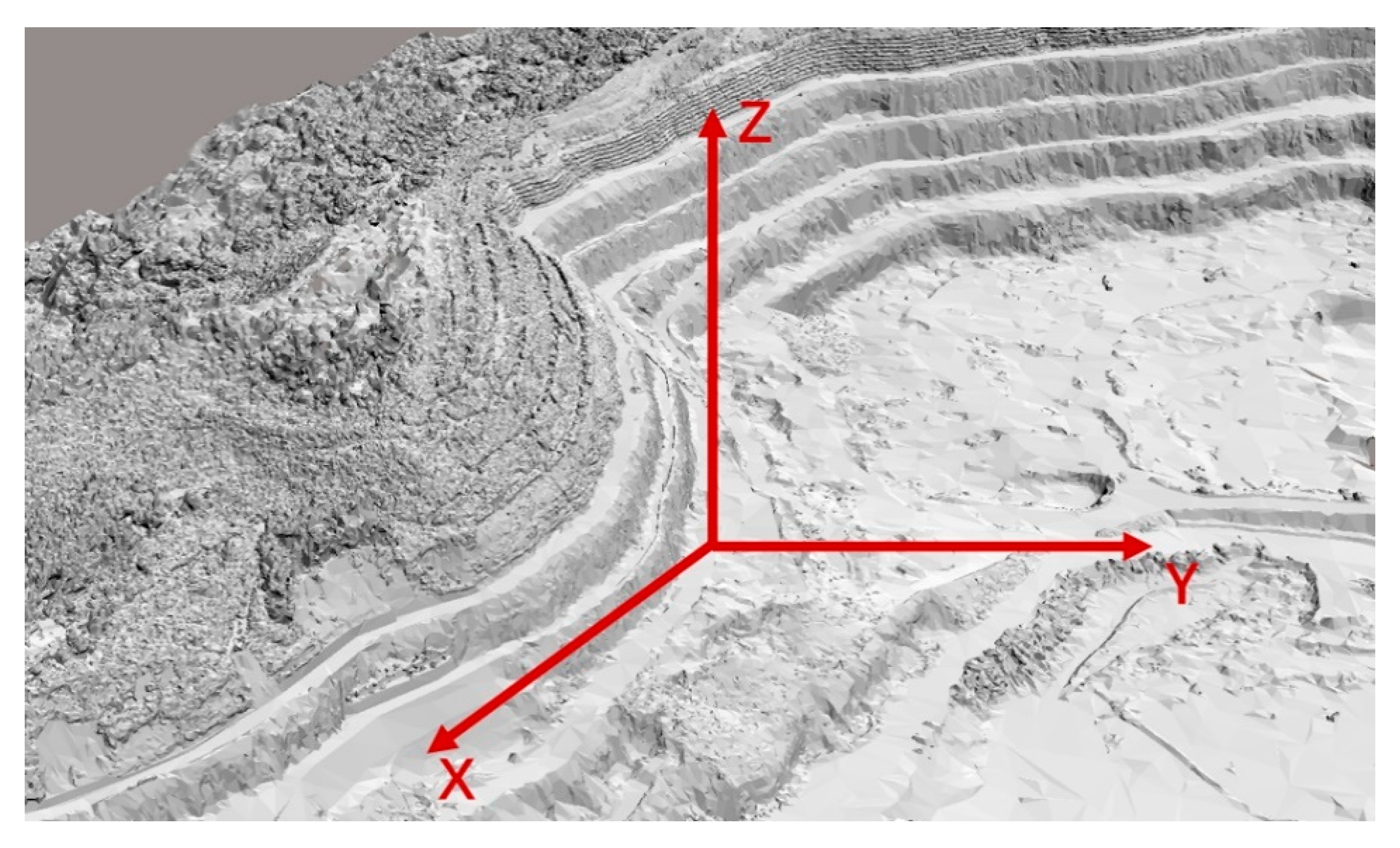
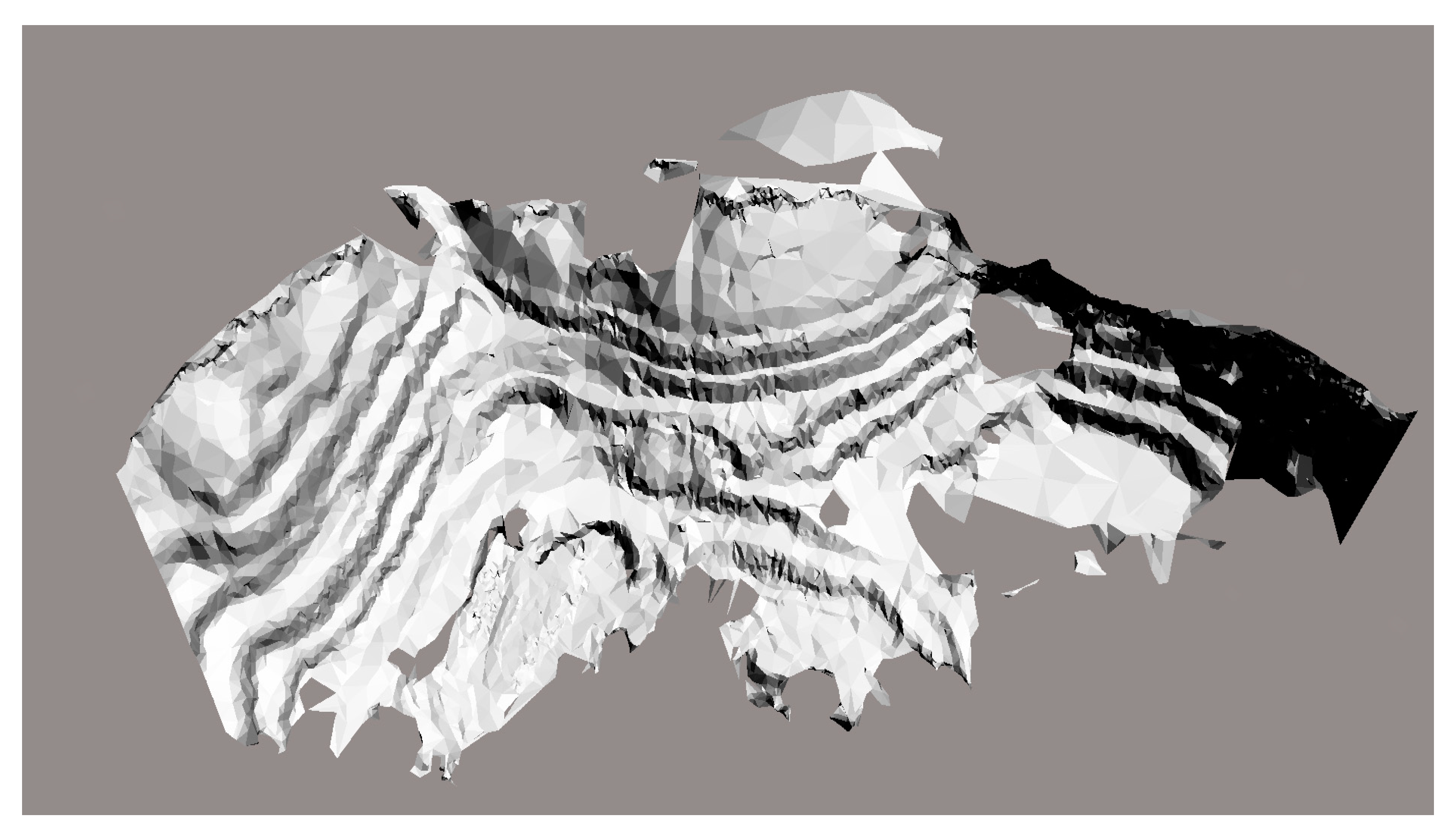
- The modular ② shows the result of the 3D reconstruction based on the camera photos and visualizes the mine plane and slope monitoring.
- The modular ③ shows statistical results of the monitoring of the mine plane risks which are related to slope damage indicators.
- The modular ④ shows the parameters of the camera and the monitoring distance.
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Petley, D. Global patterns of loss of life from landslides. Geology 2012, 40, 927–930. [Google Scholar] [CrossRef]
- Dos Santos, T.B.; Lana, M.S.; Pereira, T.M.; Canbulat, I. Quantitative hazard assessment system (Has-Q) for open pit mine slopes. Int. J. Min. Sci. Technol. 2019, 29, 419–427. [Google Scholar] [CrossRef]
- Wei, L.; Feng, Q.; Liu, F.; Mao, Y.; Liu, S.; Yang, T.; Tolomei, C.; Bignami, C.; Wu, L. Precise Topographic Model Assisted Slope Displacement Retrieval from Small Baseline Subsets Results: Case Study over a High and Steep Mining Slope. Sensors 2020, 20, 6674. [Google Scholar] [CrossRef] [PubMed]
- Kasap, Y.; Subaşı, E. Risk assessment of occupational groups working in open pit mining: Analytic Hierarchy Process. J. Sustain. Min. 2017, 16, 38–46. [Google Scholar] [CrossRef]
- CDC–Mining–Mining Facts–2014–NIOSH. Available online: https://www.cdc.gov/niosh/mining/works/statistics/factsheets/miningfacts2014.html (accessed on 4 December 2020).
- Ehschool. 2017 National Statistical Analysis of Non-Coal Open-Pit Safety Accidents Report. Available online: http://cool.ehsway.cn/news/newsdetail.aspx?pid=2&nid=7379 (accessed on 4 December 2020).
- Labant, S.; Bindzarova Gergelova, M.; Kuzevicova, Z.; Kuzevic, S.; Fedorko, G.; Molnar, V. Utilization of geodetic methods results in small open-pit mine conditions: A case study from Slovakia. Minerals 2020, 10, 489. [Google Scholar] [CrossRef]
- Can, E.; Erbiyik, H. The Role of Mine Surveying Studies in Preventing Probable Risks that might be emerged in Open Pit Mining Projects. Int. J. Adv. Sci. Res. Eng. 2018, 4, 207–213. [Google Scholar] [CrossRef]
- Manconi, A.; Allasia, P.; Giordan, D.; Baldo, M.; Lollino, G.; Corazza, A.; Albanese, V. Landslide 3D Surface Deformation Model Obtained Via RTS Measurements. In Landslide Science and Practice: Volume 2: Early Warning, Instrumentation and Monitoring; Margottini, C., Canuti, P., Sassa, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 431–436. [Google Scholar] [CrossRef]
- Wang, J.; Gao, J.; Liu, C.; Wang, J. High precision slope deformation monitoring model based on the GPS/Pseudolites technology in open-pit mine. Min. Sci. Technol. 2010, 20, 126–132. [Google Scholar] [CrossRef]
- Akbar, T.A.; Ha, S.R. Landslide hazard zoning along Himalayan Kaghan Valley of Pakistan-by integration of GPS, GIS, and remote sensing technology. Landslides 2011, 8, 527–540. [Google Scholar] [CrossRef]
- Zeybek, M.; Şanlıoğlu, I. Accurate determination of the Taşkent (Konya, Turkey) landslide using a long-range terrestrial laser scanner. Bull. Int. Assoc. Eng. Geol. 2014, 74, 61–76. [Google Scholar] [CrossRef]
- Liao, M.; Tang, J.; Wang, T.; Balz, T.; Zhang, L. Landslide monitoring with high-resolution SAR data in the Three Gorges region. Sci. China Earth Sci. 2011, 55, 590–601. [Google Scholar] [CrossRef]
- Tang, W.; Motagh, M.; Zhan, W. Monitoring active open-pit mine stability in the Rhenish coalfields of Germany using a coherence-based SBAS method. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102217. [Google Scholar] [CrossRef]
- Wang, J.; Wang, L.; Jia, M.; He, Z.; Bi, L. Construction and optimization method of the open-pit mine DEM based on the oblique photogrammetry generated DSM. Measurement 2020, 152, 107322. [Google Scholar] [CrossRef]
- Alameda-Hernández, P.; El Hamdouni, R.; Irigaray, C.; Chacón, J. Weak foliated rock slope stability analysis with ultra-close-range terrestrial digital photogrammetry. Bull. Int. Assoc. Eng. Geol. 2017, 78, 1157–1171. [Google Scholar] [CrossRef]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-Based Photogrammetry and Terrestrial Laser Scanning for the Three-Dimensional Mapping and Monitoring of Open-Pit Mine Areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- González-Díez, A.; Fernández-Maroto, G.; Doughty, M.W.; De Terán, J.R.D.; Bruschi, V.M.; Cardenal, J.; Pérez-García, J.L.; Mata, E.; Delgado, J.V. Development of a methodological approach for the accurate measurement of slope changes due to landslides, using digital photogrammetry. Landslides 2013, 11, 615–628. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, J.; Sofia, G.; Tian, Y.; Tarolli, P. Open-pit mine geomorphic changes analysis using multi-temporal UAV survey. Environ. Earth Sci. 2018, 77, 220. [Google Scholar] [CrossRef]
- Slaker, B.A.; Mohamed, K.M. A practical application of photogrammetry to performing rib characterization measurements in an underground coal mine using a DSLR camera. Int. J. Min. Sci. Technol. 2017, 27, 83–90. [Google Scholar] [CrossRef]
- Giacomini, A.; Thoeni, K.; Santise, M.; Diotri, F.; Booth, S.; Fityus, S.; Roncella, R. Temporal-Spatial Frequency Rockfall Data from Open-Pit Highwalls Using a Low-Cost Monitoring System. Remote Sens. 2020, 12, 2459. [Google Scholar] [CrossRef]
- Soro, S.; Heinzelman, W. A Survey of Visual Sensor Networks. Adv. Multimed. 2009, 2009, 640386. [Google Scholar] [CrossRef]
- Akdere, M.; Çetintemel, U.; Crispell, D.; Jannotti, J.; Mao, J.; Taubin, G. Data-Centric Visual Sensor Networks for 3D Sensing. In Revised Selected and Invited Papers, GeoSensor Networks: Second International Conference, GSN 2006, Boston, MA, USA, 1–3 October 2006; Nittel, S., Labrinidis, A., Stefanidis, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 131–150. [Google Scholar] [CrossRef]
- Kulkarni, P.; Ganesan, D.; Shenoy, P.; Lu, Q. SensEye: A multi-tier camera sensor network. In Proceedings of the 13th annual ACM international conference on Multimedia, Singapore, 6–11 November 2005; pp. 229–238. [Google Scholar] [CrossRef]
- He, S.; Shin, D.-H.; Zhang, J.; Chen, J.; Sun, Y. Full-View Area Coverage in Camera Sensor Networks: Dimension Reduction and Near-Optimal Solutions. IEEE Trans. Veh. Technol. 2015, 65, 7448–7461. [Google Scholar] [CrossRef]
- Yaagoubi, R.; El Yarmani, M.; Kamel, A.; Khemiri, W. HybVOR: A Voronoi-Based 3D GIS Approach for Camera Surveillance Network Placement. ISPRS Int. J. Geo-Inf. 2015, 4, 754–782. [Google Scholar] [CrossRef]
- Duarte, J.; Rodrigues, F.; Baptista, J.S. Data Digitalisation in the Open-Pit Mining Industry: A Scoping Review. Arch. Comput. Methods Eng. 2020. [Google Scholar] [CrossRef]
- Aggarwal, S.; Mishra, P.K.; Sumakar, K.V.S.; Chaturvedi, P. Landslide Monitoring System Implementing IOT Using Video Camera. In Proceedings of the 2018 3rd International Conference for Convergence in Technology (I2CT), Pune, India, 6–8 April 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Yin, Y.; Jiang, C.; Lv, J.; Wang, J.; Ju, X.; Wang, H.; Xing, Y.; Zhang, L. Mining Ground Surface Information Extraction and Topographic Analysis Using UAV Video Data. In Proceedings of the E3S Web of Conferences, Shanghai, China, 18–20 September 2020; p. 05030. [Google Scholar] [CrossRef]
- McLeod, T.; Samson, C.; Labrie, M.; Shehata, K.; Mah, J.; Lai, P.; Wang, L.; Elder, J. Using Video Acquired from an Unmanned Aerial Vehicle (UAV) to Measure Fracture Orientation in an Open-Pit Mine. Geomatica 2013, 67, 173–180. [Google Scholar] [CrossRef]
- Cho, S.-J.; Bang, E.-S.; Kang, I.-M. Construction of Precise Digital Terrain Model for Nonmetal Open-pit Mine by Using Unmanned Aerial Photograph. Econ. Environ. Geol. 2015, 48, 205–212. [Google Scholar] [CrossRef]
- Kromer, R.A.; Walton, G.; Gray, B.; Lato, M.J. Robert Group Development and Optimization of an Automated Fixed-Location Time Lapse Photogrammetric Rock Slope Monitoring System. Remote Sens. 2019, 11, 1890. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y. Analysis of precision of relative orientation and forward intersection with high-overlap images. Geomat. Inf. Sci. Wuhan Univ. 2005, 30, 126–130. [Google Scholar]
- Luhmann, T.; Fraser, C.S.; Maas, H.-G. Sensor modelling and camera calibration for close-range photogrammetry. ISPRS J. Photogramm. Remote Sens. 2016, 115, 37–46. [Google Scholar] [CrossRef]
- Alsadik, B.; Gerke, M.; Vosselman, G.; Daham, A.; Jasim, L. Minimal Camera Networks for 3D Image Based Modeling of Cultural Heritage Objects. Sensors 2014, 14, 5785–5804. [Google Scholar] [CrossRef] [PubMed]
- Feng, S.; Shen, S.; Huang, L.; Champion, A.C.; Yu, S.; Wu, C.; Zhang, Y. Three-dimensional robot localization using cameras in wireless multimedia sensor networks. J. Netw. Comput. Appl. 2019, 146, 102425. [Google Scholar] [CrossRef]
- Godfrey, S.; Cooper, J.; Bezombes, F.; Plater, A. Monitoring coastal morphology: The potential of low-cost fixed array action cameras for 3D reconstruction. Earth Surf. Process. Landf. 2020, 45, 2478–2494. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Methods | Efficiency | Monitoring Cycle | Expenses (Estimate) | Accuracy |
|---|---|---|---|---|
| Traditional geodesic methods | Low efficiency (nonautomatic, restricted by terrain access and climate) | Depending on the monitoring task (ranging from one day to six months) | High costs (USD 2000 equipment costs + high labor costs) | High accuracy (millimeter, submillimeter) |
| GPS technology | High efficiency (automatic) | Real time | High costs (usually USD > 500,000 initial investment) | High accuracy (millimeter) |
| 3D laser scanning technology | Medium efficiency (semiautomatic) | Depending on the monitoring task (ranging from one day to six months) | High costs (USD > 150,000 equipment costs + labor costs) | high accuracy (millimeter, centimeter) |
| Measuring robot technology | Medium efficiency (automatic, restricted by terrain access conditions) | Near real time | High costs, (USD > 150,000 equipment costs) | High accuracy (millimeter) |
| RS technology | Medium efficiency (semiautomatic) | Based on the revisit cycle of RS satellites (>4 days) | Low costs (USD > 3000 a view) | Low accuracy (decimeter, meter) |
| InSAR | Medium efficiency (semiautomatic) | Based on the revisit cycle of RS satellites (>11 days) | Low costs (USD > 7000 a view) | High accuracy (millimeter) |
| UAV photogrammetry | Medium efficiency (semiautomatic) | Depending on the monitoring task (ranging from one week to six months) | Low costs (USD > 4000 equipment costs + labor costs) | Medium accuracy (centimeter) |
| Digital close-up photogrammetry | High efficiency (automatic) | Near real time | Low costs (USD 1500 a monitoring camera point) | Medium accuracy (centimeter, decimeter) |
| Focal Length (mm) | Viewing Angle (°) | Photographic Range (m) | Quantity of Cameras | Accuracy (cm) |
|---|---|---|---|---|
| 2.8 | 79.93 | 335.22 | 3 | 34 |
| 4 | 60.79 | 234.63 | 6 | 24 |
| 6 | 42.72 | 156.44 | 11 | 16 |
| 8 | 32.69 | 117.31 | 17 | 12 |
| 12 | 22.12 | 78.19 | 27 | 8 |
| 16 | 16.68 | 58.64 | 38 | 6 |
| 25 | 10.72 | 37.50 | 62 | 4 |
| Point | X | Y |
|---|---|---|
| 1 | 23.0407125 N | 113.5120991 E |
| 2 | 23.4067437 N | 113.5121206 E |
| 3 | 23.4064843 N | 113.5121804 E |
| 4 | 23.4060857 N | 113.5123301 E |
| 5 | 23.4056001 N | 113.5123073 E |
| 6 | 23.4051905 N | 113.5122210 E |
| Quantity of Cameras | Overlap at Full Coverage (%) | Coverage at 80% Overlap(m) |
|---|---|---|
| 4 | 72.44 | 422.31 |
| 5 | 77.96 | 469.24 |
| 6 | 81.63 | 516.16 |
| 7 | 84.25 | 563.08 |
| 8 | 86.22 | 610.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Tao, P.; Meng, X.; Liu, M.; Liu, X. An Optimum Deployment Algorithm of Camera Networks for Open-Pit Mine Slope Monitoring. Sensors 2021, 21, 1148. https://doi.org/10.3390/s21041148
Zhang H, Tao P, Meng X, Liu M, Liu X. An Optimum Deployment Algorithm of Camera Networks for Open-Pit Mine Slope Monitoring. Sensors. 2021; 21(4):1148. https://doi.org/10.3390/s21041148
Chicago/Turabian StyleZhang, Hua, Pengjie Tao, Xiaoliang Meng, Mengbiao Liu, and Xinxia Liu. 2021. "An Optimum Deployment Algorithm of Camera Networks for Open-Pit Mine Slope Monitoring" Sensors 21, no. 4: 1148. https://doi.org/10.3390/s21041148
APA StyleZhang, H., Tao, P., Meng, X., Liu, M., & Liu, X. (2021). An Optimum Deployment Algorithm of Camera Networks for Open-Pit Mine Slope Monitoring. Sensors, 21(4), 1148. https://doi.org/10.3390/s21041148