
Evaluation Methodology of a Smart Clothing Biomechanical Energy Harvesting System for Mountain Rescuers





Abstract
1. Introduction
1.1. Energy Harvesting for Mountain Rescuer Active Clothing
1.2. Electromagnetic Harvester Evaluation
- (1)
- realistic inputs for the power conversion and storage subsystem;
- (2)
- uniform conditions for different test participants;
- (3)
- repeatability for various systems, their configurations or parameters;
- (4)
- minimum time load on the participants.
2. Materials and Methods
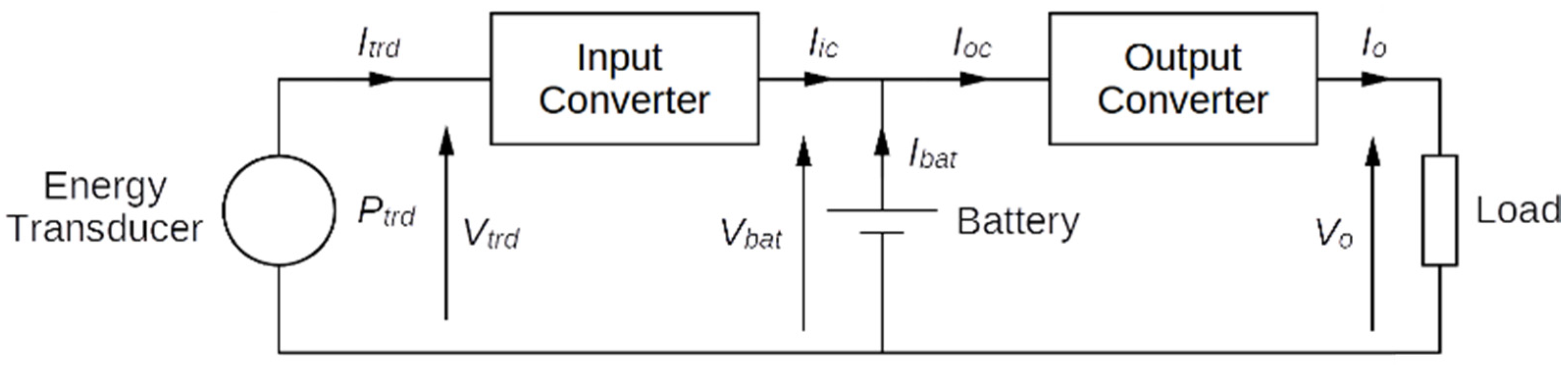
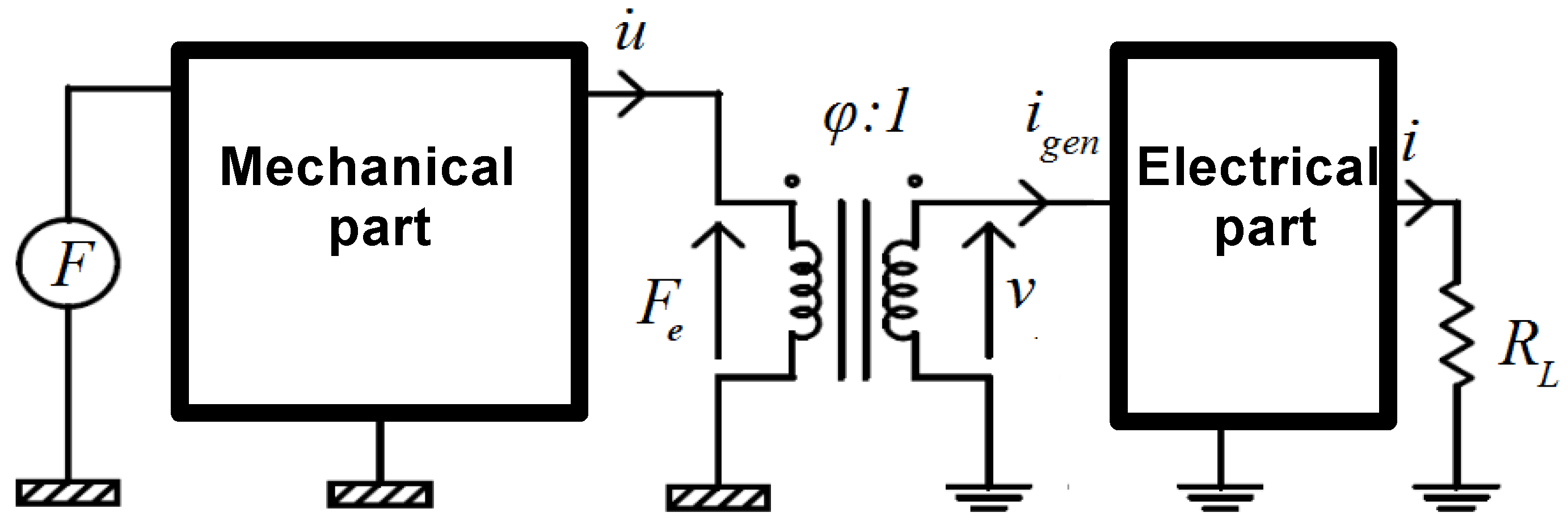
2.1. System Mathematical Description
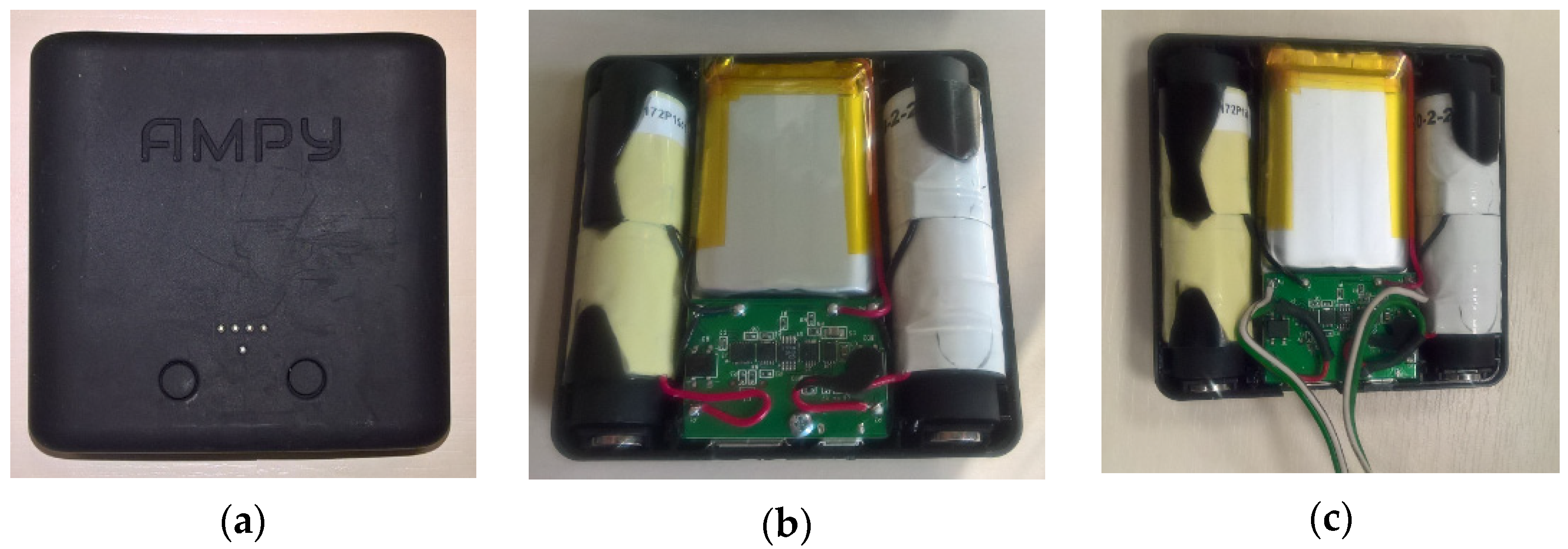
2.2. Example Energy Harvesting System
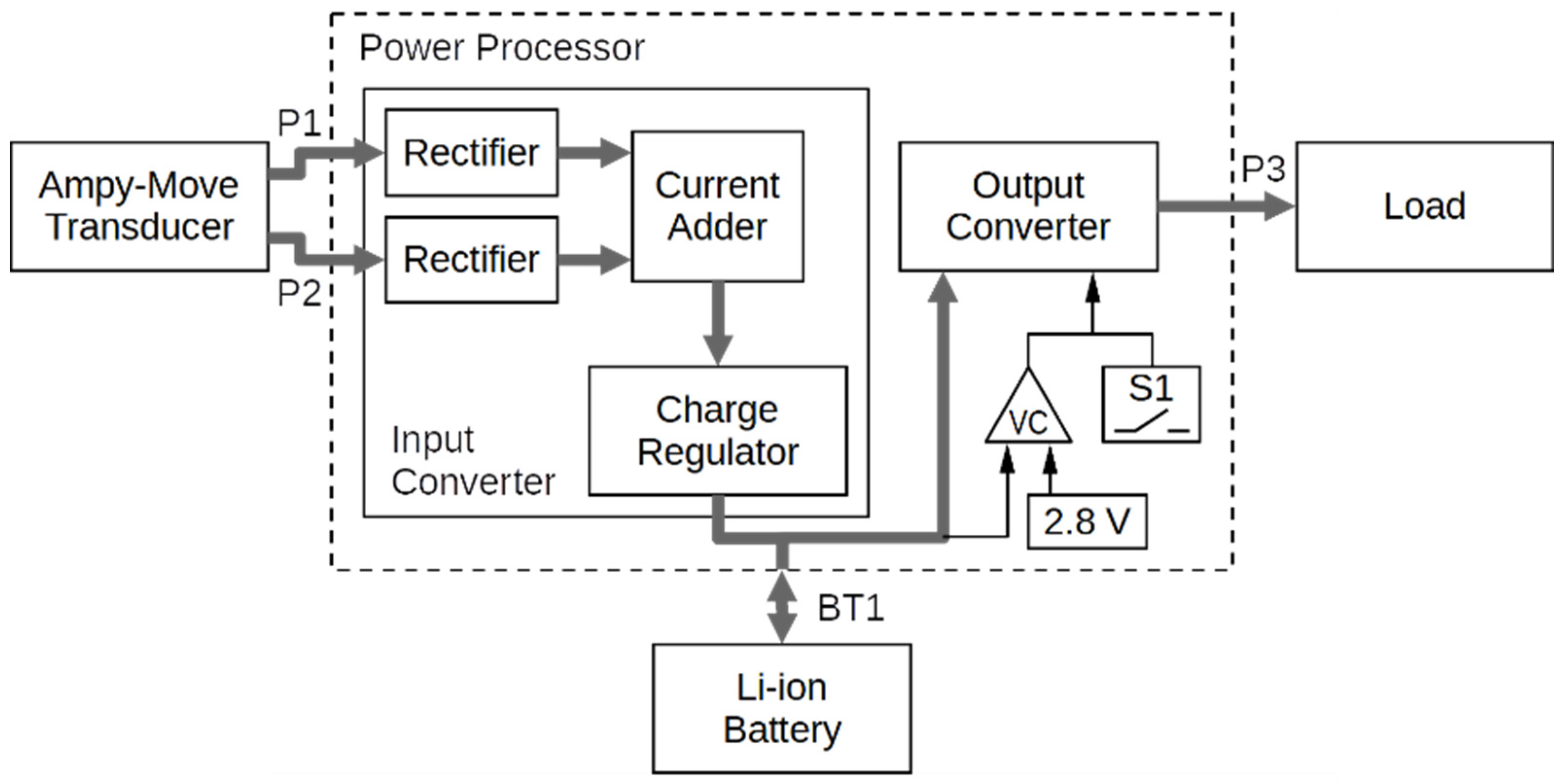
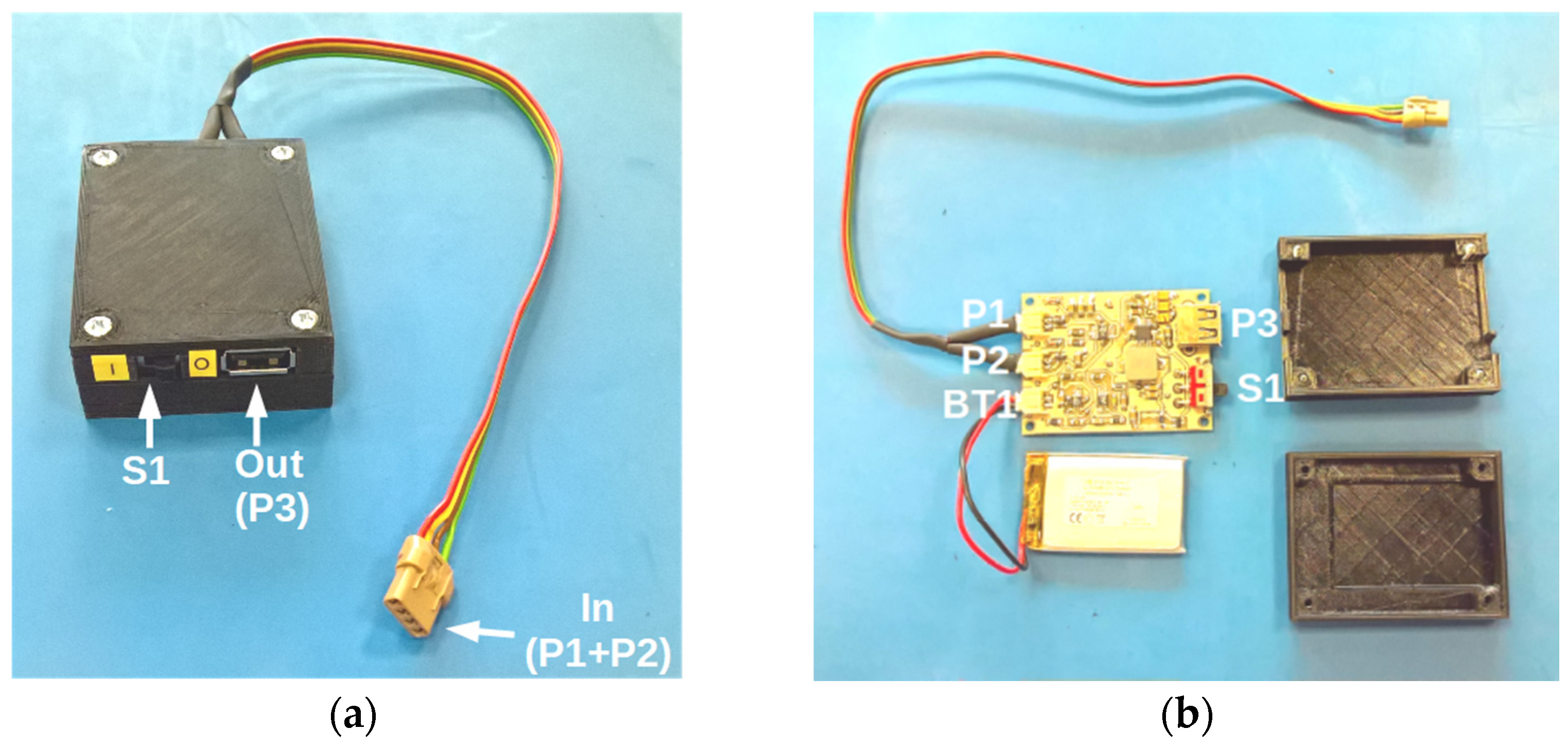
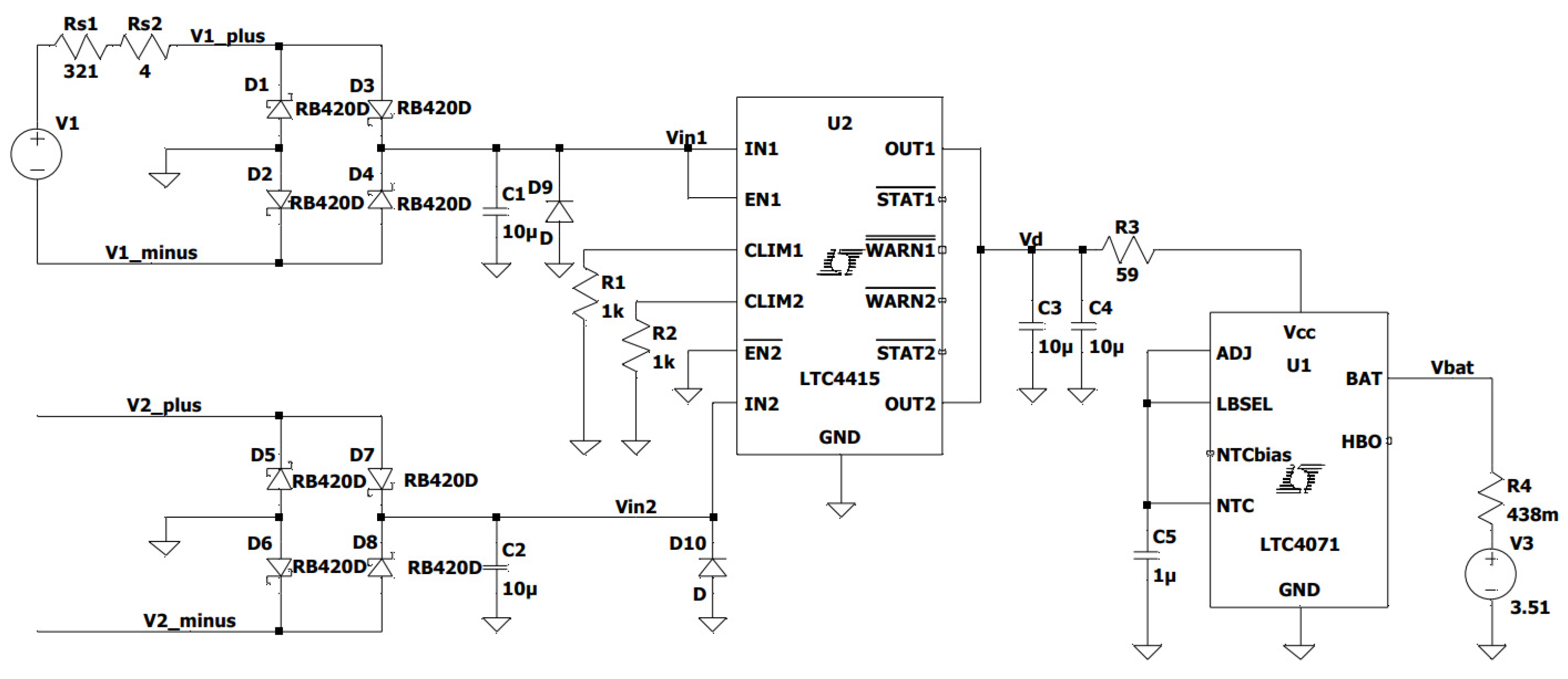
2.3. Power Processor
2.4. General Idea of the Evaluation Methodology
- Tests cannot be performed outdoors due to the impossibility to retain invariable conditions that affect human performance, e.g., temperature or humidity.
- Each experiment duration should be at least of the same order of magnitude as mountain rescuer work time during rescue operations, i.e., several hours. This would be a considerable physical and time load for volunteers, and it would cause random, unrepeatable variations of motion parameters due to different fatigue patterns.
- For a thorough assessment, it is necessary to repeat an experiment several times for various work conditions, while it is not possible to achieve invariant volunteer motion for several hours.
- (1)
- Measurement of the generator’s characteristics in laboratory, for several volunteers and for various work conditions (activities), resembling real ones. An ergonomics assessment can be simultaneously carried out at this stage.
- (2)
- Measurement of the power conversion and storage subsystem (with a battery serving as a buffer between the generator and the load), also in laboratory, with the use of an electronic model that simulates the generator’s characteristics as measured at Stage 1.
2.5. First Stage of the Methodology
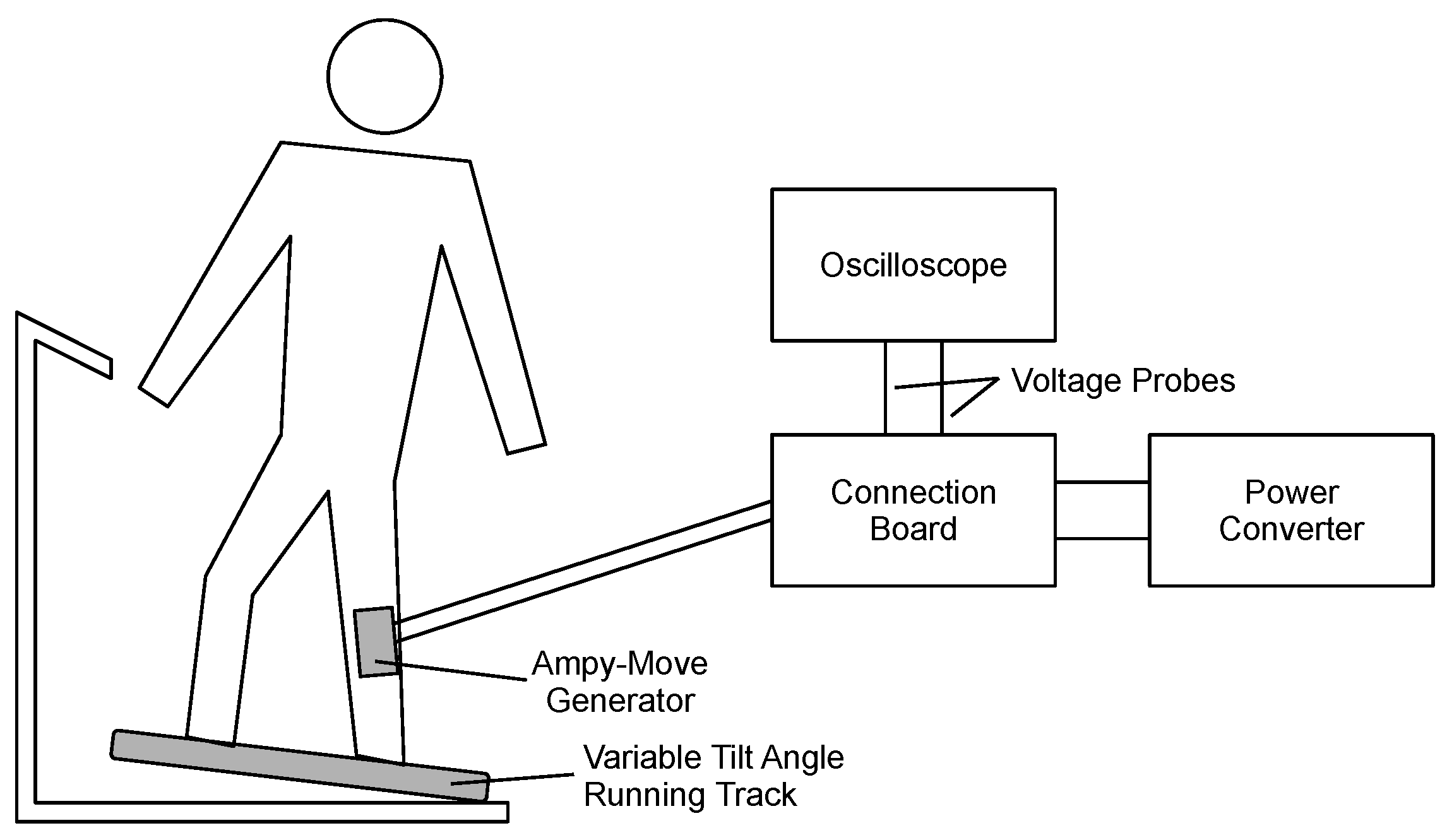
- the Ampy-Move generator with the power processing circuit;
- an FDM-THM-M-3i running track (zebris Medical, Isny, Germany) with variable speed and tilt angle as well as a measurement module for gait parameters;
- a TPS2014B oscilloscope (Tektronix, Beaverton, OR, USA) with isolated channels and two Tektronix TPP0101 probes;
- a connection board for oscilloscope probes (custom-made).
- (1)
- Specific physical activity parameters were set according to Table 1.
- (2)
- Volunteer movements were let settle down for approximately 30 s.
- (3)
- Both coil voltage waveforms were recorded simultaneously for a defined time.
- (4)
- Point 3 was repeated several times.
- a time resolution of the oscilloscope waveform suitable to represent the fastest variations of voltage in time observed (the shortest time, the highest amplitude);
- waveform length corresponding to several dozen steps to limit the influence of accidental variations and volunteer movement irregularity.
2.6. Second Stage of the Methodology
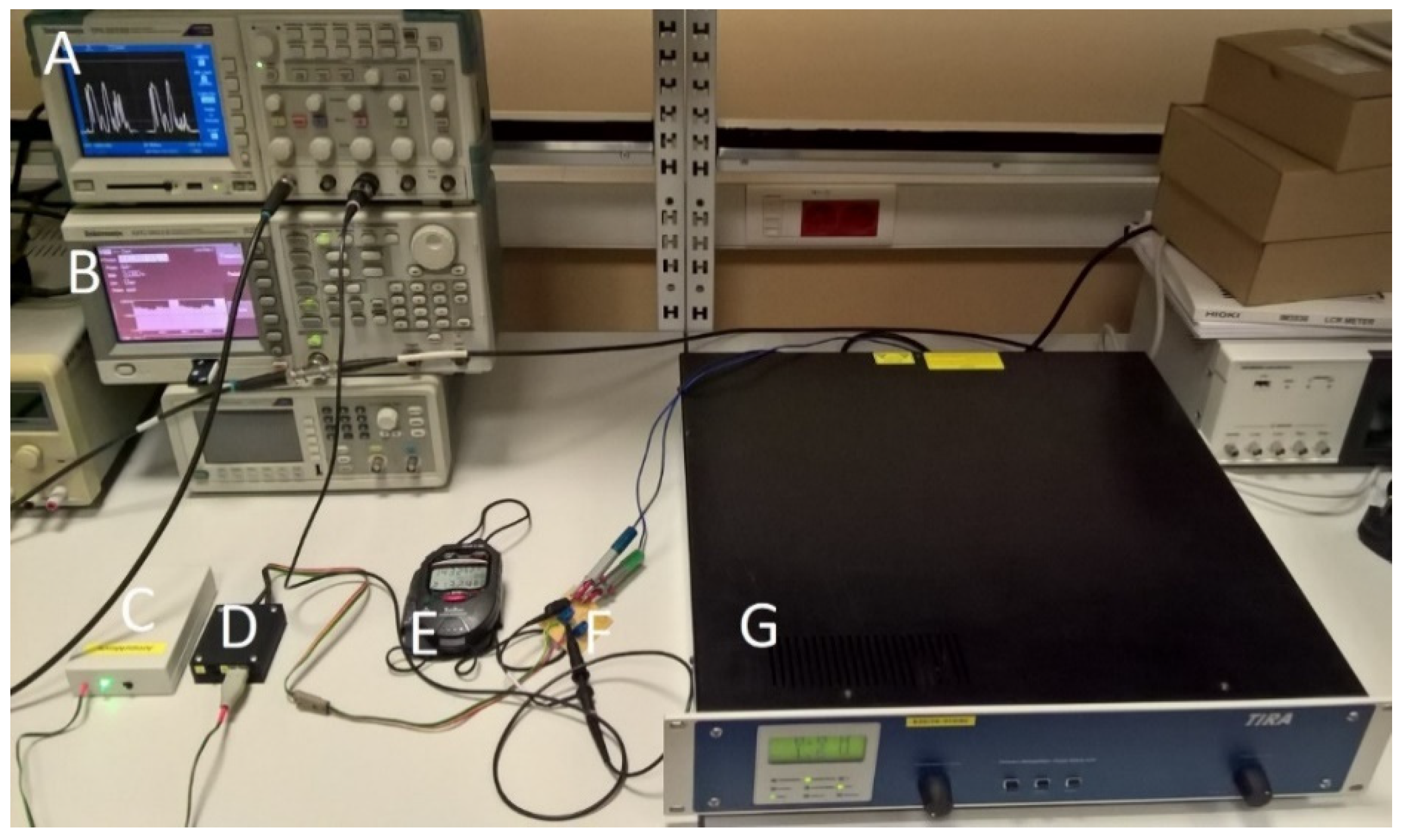
- a Tektronix AFG 3021B arbitrary function generator with the ArbExpress software, which can generate voltage waveforms from recorded voltage samples (approximately 2000 for a single measurement);
- a TV 51,110 signal amplifier (TIRA, Schalkau, Germany) operating in its voltage mode, necessary to achieve output currents corresponding to those of the Ampy-Move transducer;
- the power processing circuit for the Ampy-Move transducer;
- a Tektronix TPS2014B oscilloscope and one Tektronix TPP0101 probe;
- a connection board for the oscilloscope probe (custom-made);
- an active component (GPS module) load model with a “no power” detector and sound signaling (custom-made);
- a Delta E 100 stopwatch (Hanhart 1882, Gütenbach, Germany).
- (1)
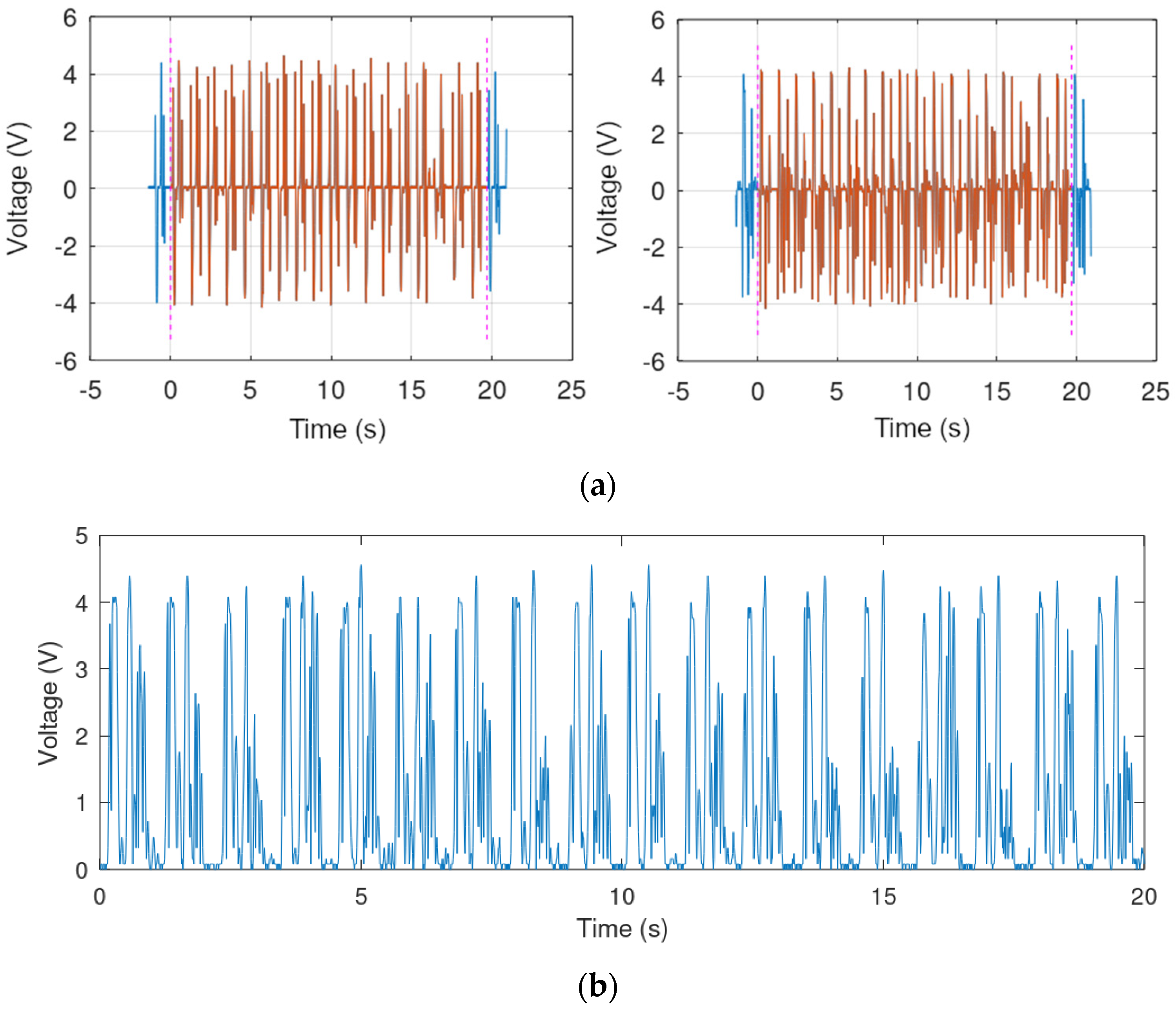
- Outermost parts of the waveform were rejected and the waveform was truncated to an integer multiple of step length, as shown in Figure 9a.
- (2)
- Waveforms from the two coils were combined in one waveform corresponding to the operation of the diode bridge present in the power processing circuit, with the use of the absolute value function, as shown in Figure 9b (function generator outputs are ground-referenced, which makes it impossible to generate two independent voltages corresponding to the two coils).
- (1)
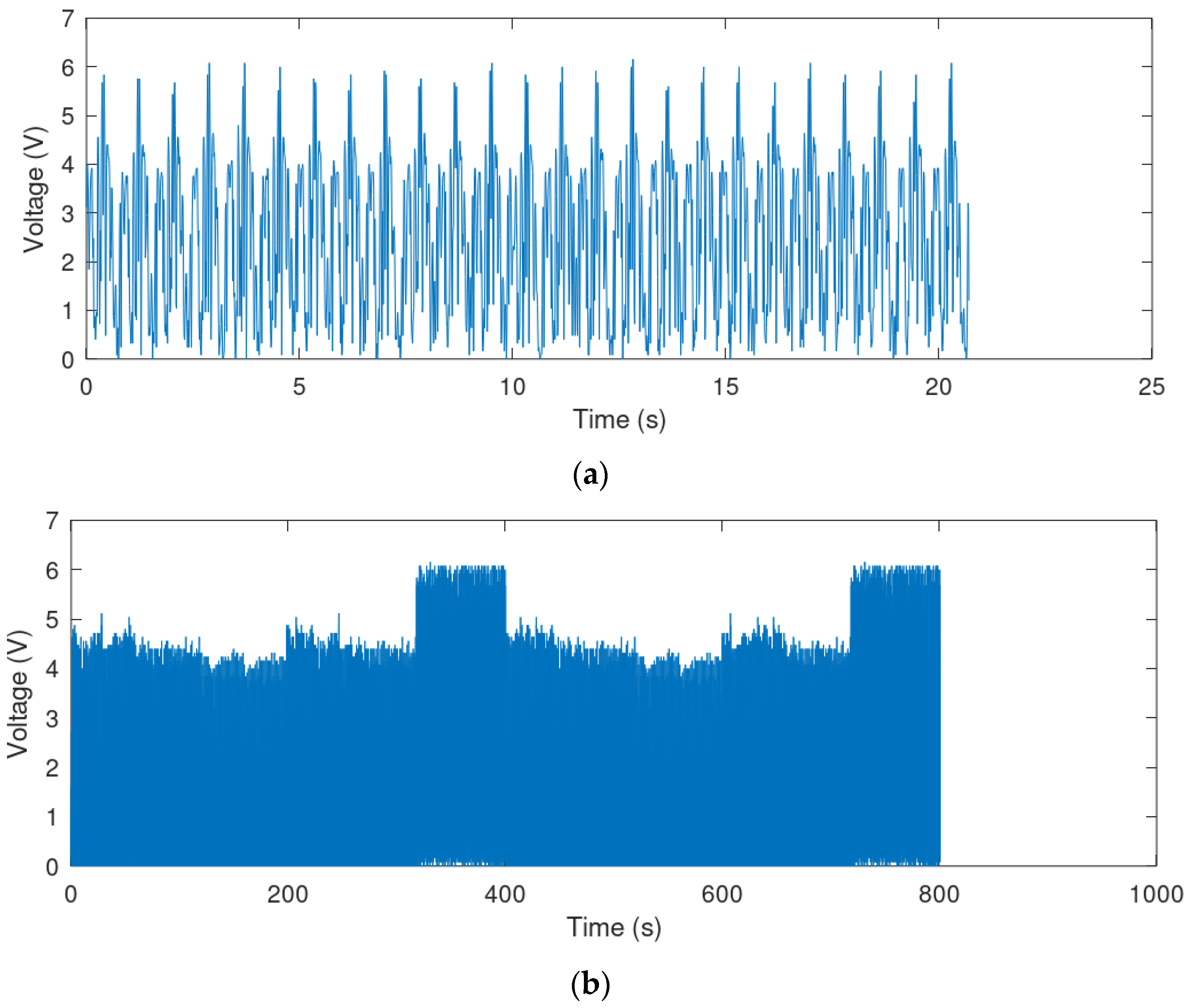
- The best case was chosen as the one providing the highest RMS value and amplitude of voltage; this was walking on flat with a speed of 8 km/h for Volunteer 4, trial 1. The waveform length for this case was 20.71 s (Figure 10a).
- (2)
2.7. Ergonomics Assessment
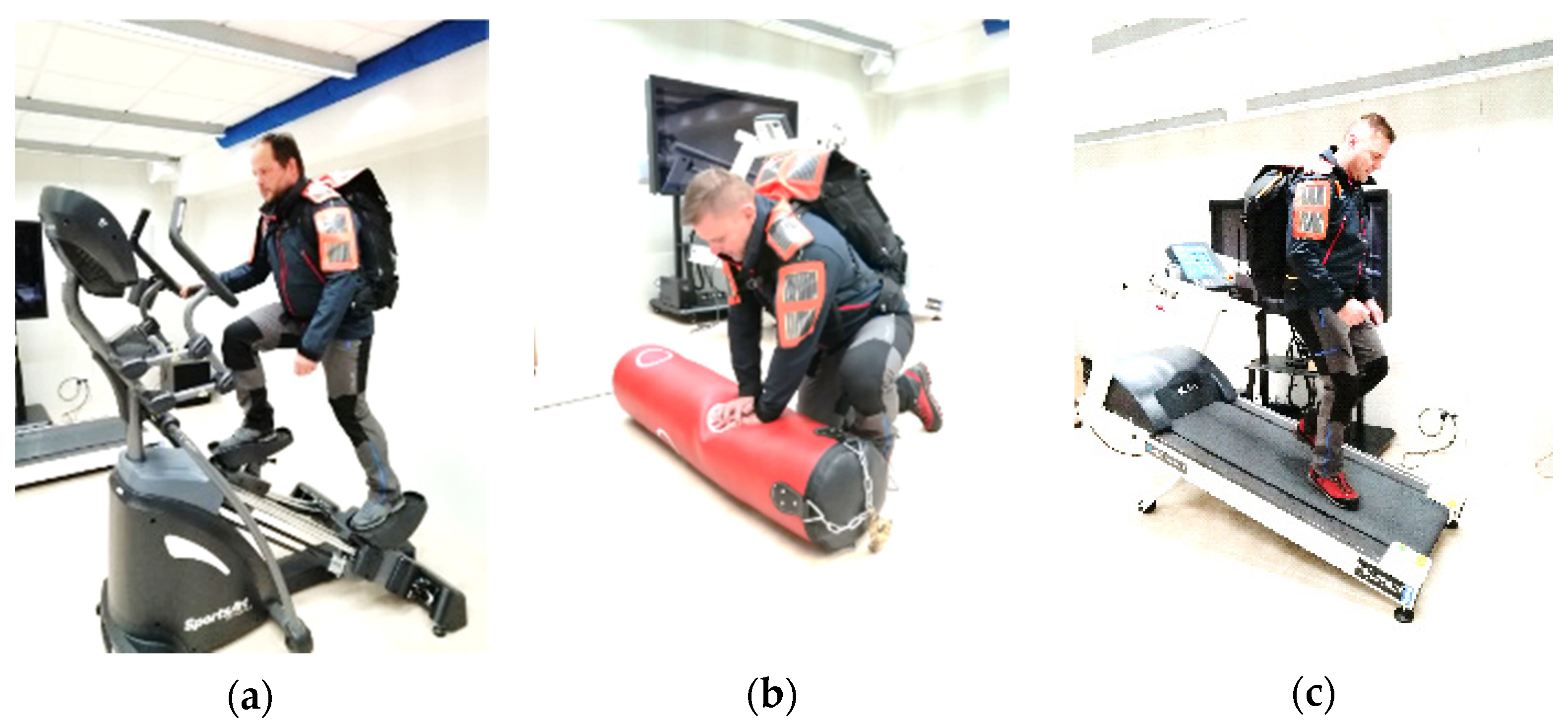
- uphill climbing simulation: an exercise on a climbing trainer at a speed of 40 steps/min, stride length of approx. 70 cm;
- simulation of providing first aid: an exercise in a squatting position;
- lifting simulation: an exercise with a 81 kg load on a lower lift;
- downhill walk simulation: walking down a treadmill at a speed of 3 km/h, with a 20% tilt;
- simulation of climbing a rope: an exercise with a 81 kg load on an upper lift.
2.8. Methodology Validation
3. Results
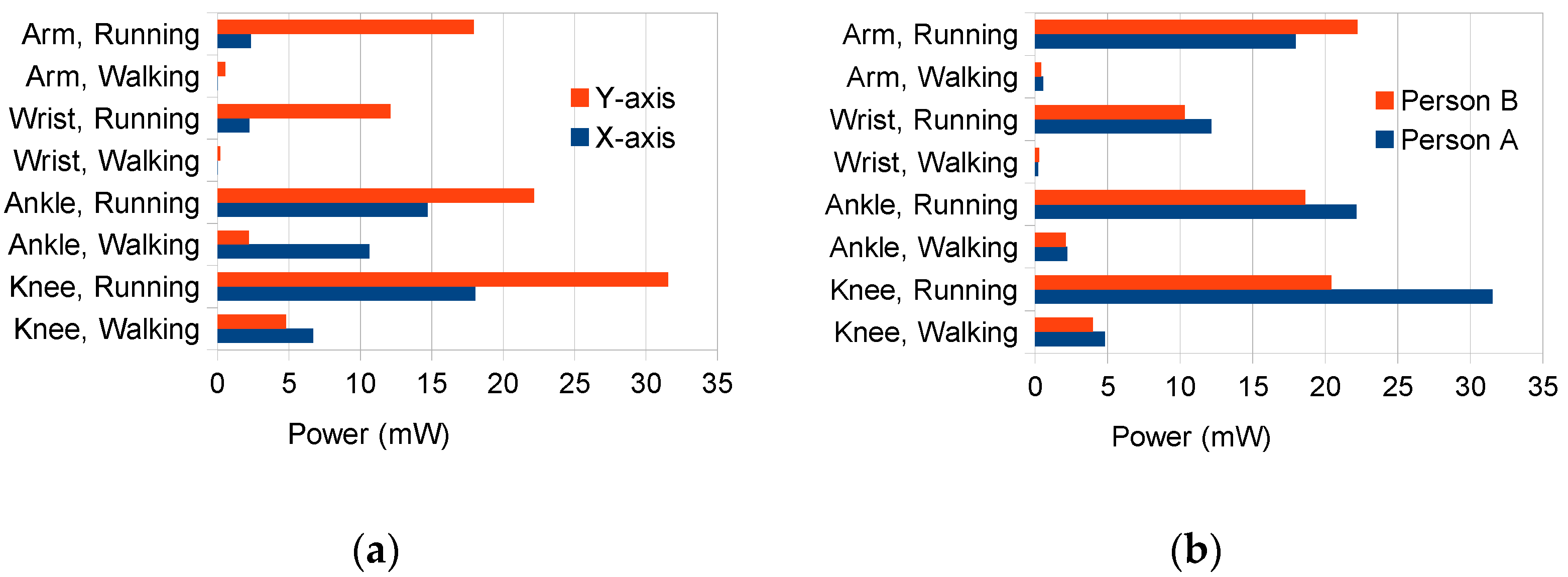
3.1. Generator Average Power in Real Conditions
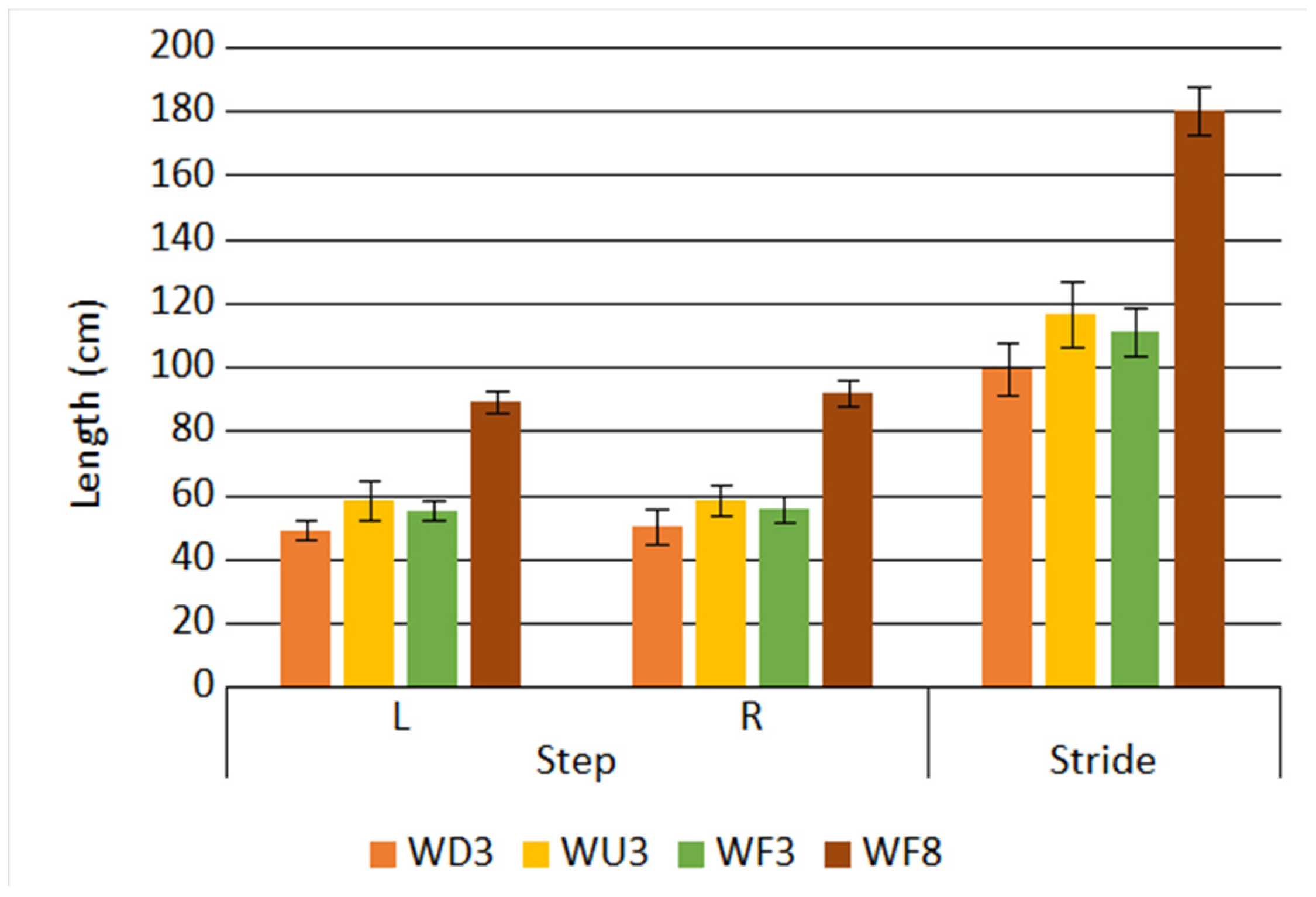
3.2. Maximum Force as well as Step and Stride Lengths in Laboratory Conditions
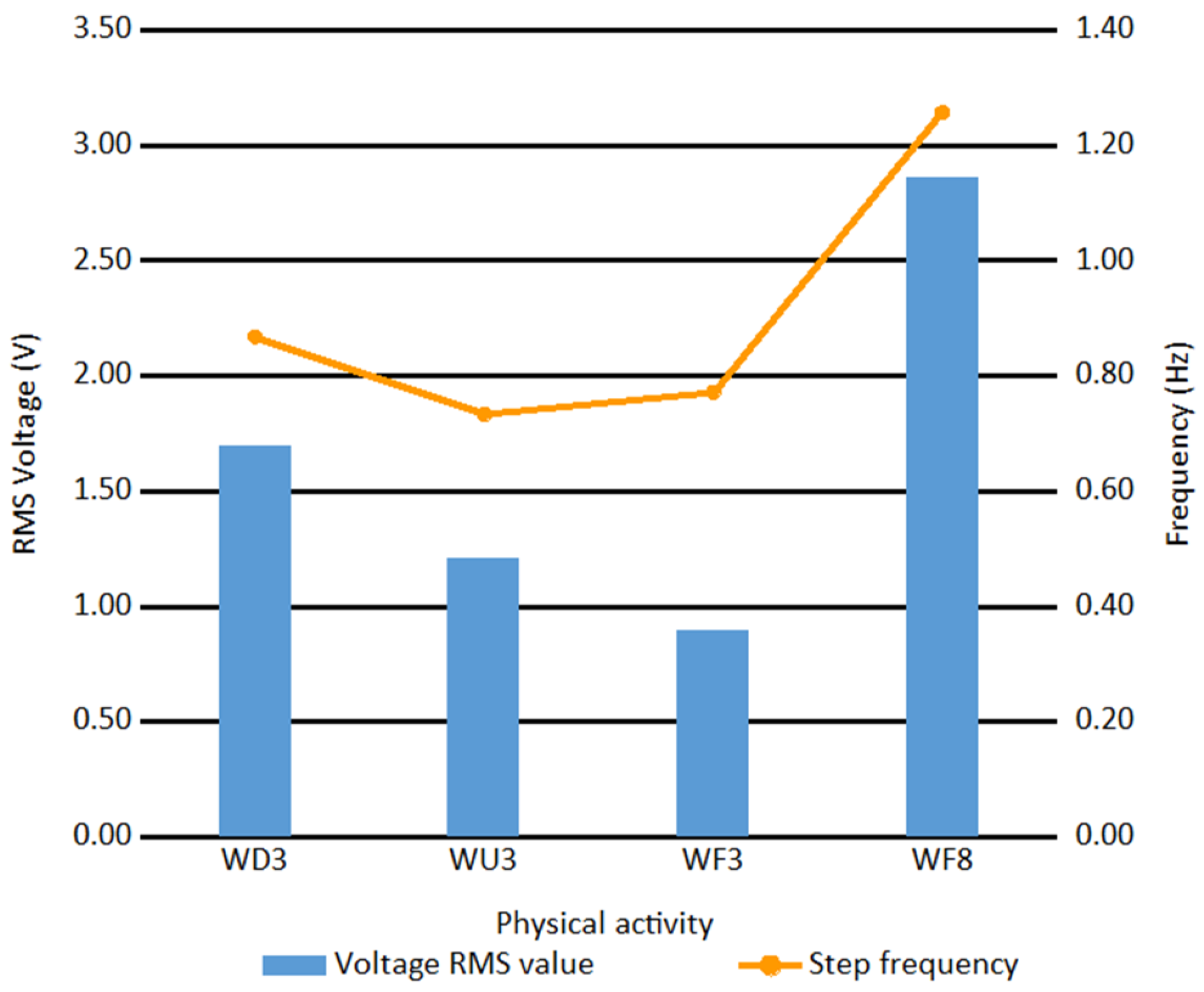
3.3. Generator Characteristics in Laboratory Conditions
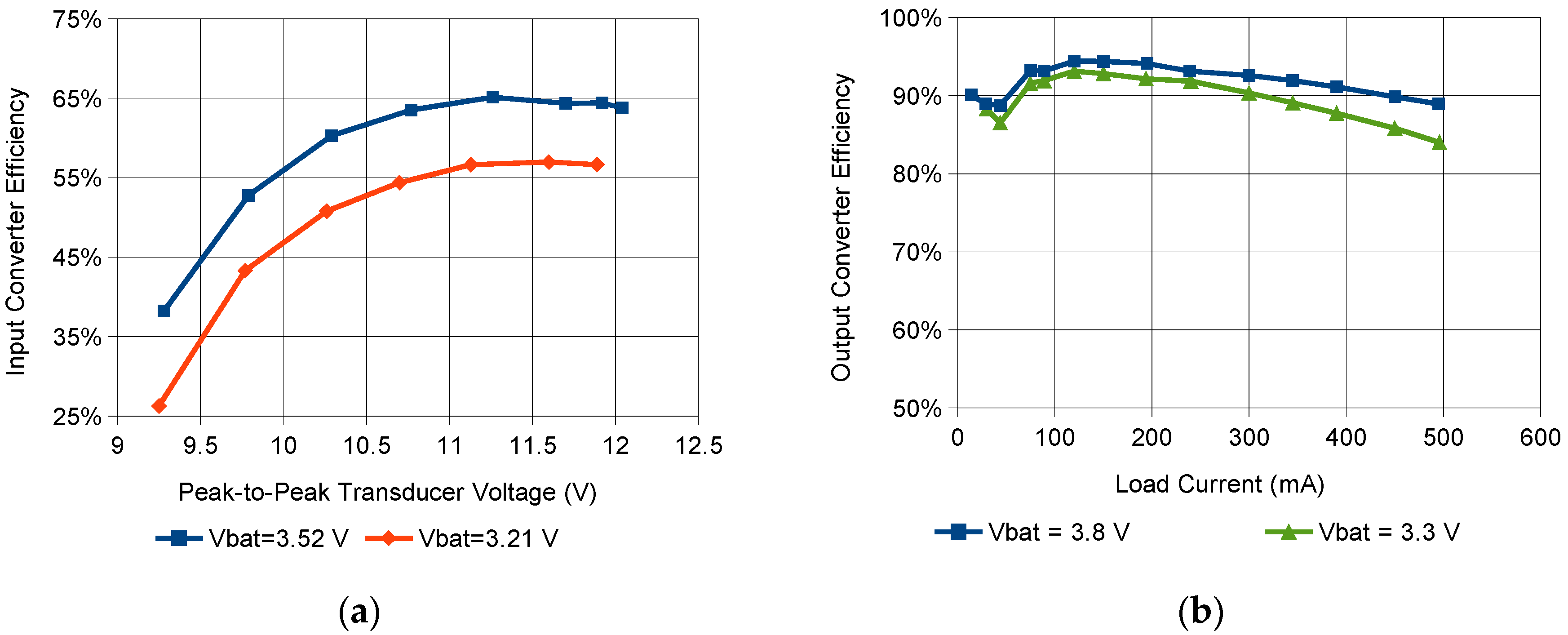
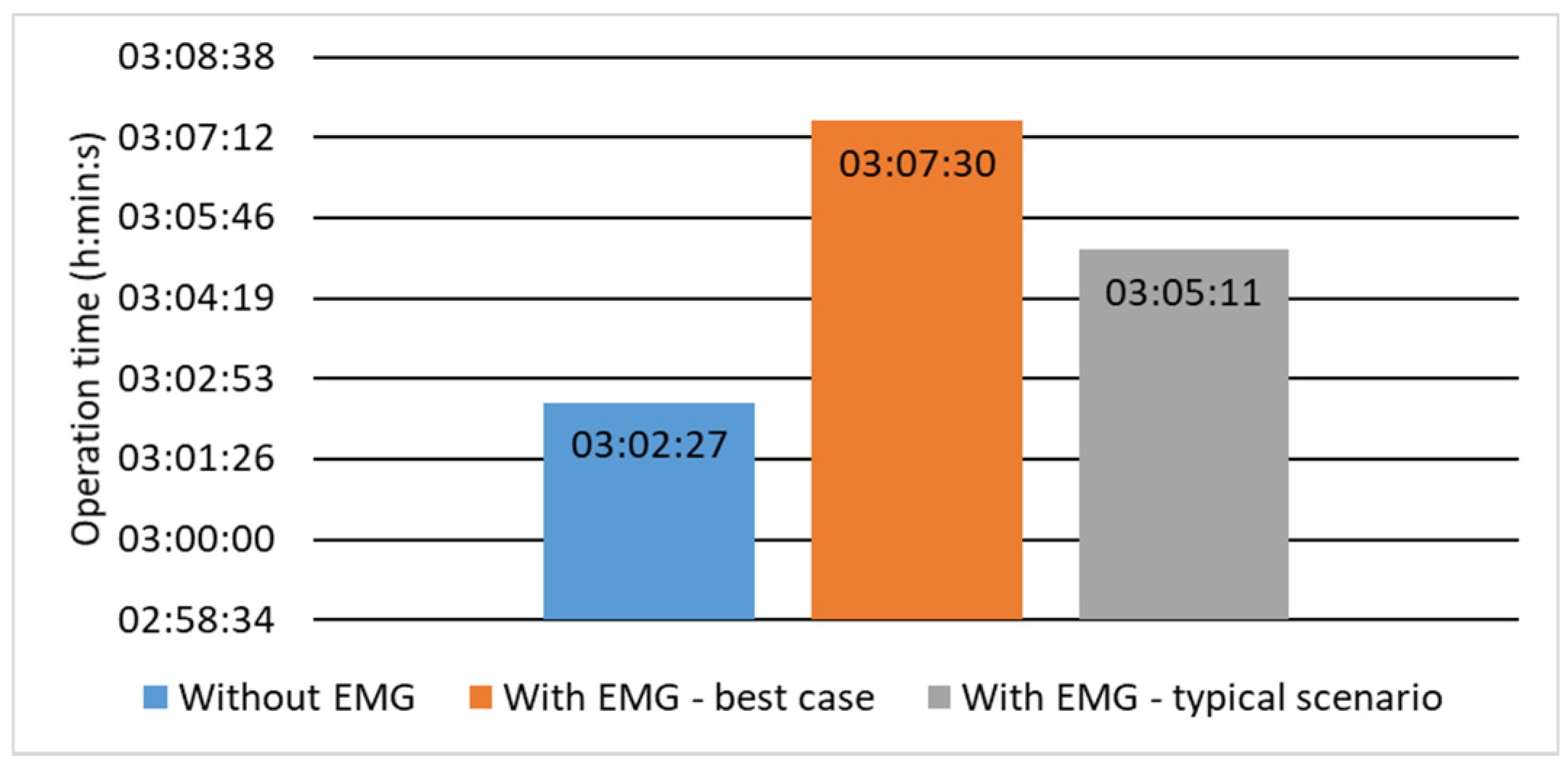
3.4. Energy Harvesting System Efficiency
3.5. Ergonomics Assessment
3.6. Methodology Validation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Voss, T.J.; Subbian, V.; Beyette, F.R. Feasibility of energy harvesting techniques for wearable medical devices. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 626–629. [Google Scholar] [CrossRef]
- Jokic, P.; Magno, M. Powering smart wearable systems with flexible solar energy harvesting. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Wu, F.; Redouté, J.; Yuce, M.R. A self-powered wearable body sensor network system for safety applications. In Proceedings of the 2018 IEEE Sensors, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Bibbo, D.; Conforto, S.; Laudani, A.; Lozito, G.M. Solar energy harvest on bicycle helmet for smart wearable sensors. In Proceedings of the 2017 IEEE 3rd International Forum on Research and Technologies for Society and Industry (RTSI), Modena, Italy, 11–13 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Luceño-Sánchez, J.A.; Díez-Pascual, A.M.; Capilla, R.P. Materials for photovoltaics: State of art and recent developments. Int. J. Mol. Sci. 2019, 20, 976. [Google Scholar] [CrossRef] [PubMed]
- Hyland, M.; Hunter, H.; Liu, J.; Veety, E.; Vashaee, D. Wearable thermoelectric generators for human body heat harvesting. Appl. Energy 2016, 182, 518–524. [Google Scholar] [CrossRef]
- Jung, Y.S.; Jeong, D.H.; Kang, S.B.; Kim, F.; Jeong, M.H.; Lee, K.-S.; Son, J.S.; Baik, J.M.; Kim, J.; Choi, K.J. Wearable solar thermoelectric generator driven by unprecedentedly high temperature difference. Nano Energy 2017, 40, 663–672. [Google Scholar] [CrossRef]
- Brogan, Q.; O’Connor, T.; Ha, D.S. Solar and thermal energy harvesting with a wearable jacket. In Proceedings of the 2014 IEEE International Symposium on Circuits and Systems (ISCAS), Melbourne, Australia, 1–5 June 2014; pp. 1412–1415. [Google Scholar] [CrossRef]
- Pasko, D.; Mrazik, M.; Elleithy, K. Battery independence: Reducing the dependence on batteries in wearable computing through energy harvesting techniques. In Proceedings of the IEEE 8th Annual Ubiquitous Computing, Electronics and Mobile Communication Conference (UEMCON), New York, NY, USA, 19–21 October 2017; pp. 37–46. [Google Scholar] [CrossRef]
- Zhao, J.; You, Z. A shoe-embedded piezoelectric energy harvester for wearable sensors. Sensors 2014, 14, 12497–12510. [Google Scholar] [CrossRef] [PubMed]
- Meier, R.; Kelly, N.; Almog, O.; Chiang, P. A piezoelectric energy-harvesting shoe system for podiatric sensing. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 622–625. [Google Scholar] [CrossRef]
- Granstrom, J.; Feenstra, J.; Sodano, H.A.; Farinholt, K. Energy harvesting from a backpack instrumented with piezoelectric shoulder straps. Smart Mater Struct. 2007, 16, 1810–1820. [Google Scholar] [CrossRef]
- Chen, J.; Huang, Y.; Zhang, N.; Zou, H.; Liu, R.; Tao, C.; Fan, X.; Wang, Z.L. Micro-cable structured textile for simultaneously harvesting solar and mechanical energy. Nat. Energy 2016, 1, 16138. [Google Scholar] [CrossRef]
- Tian, Z.; He, J.; Chen, X.; Zhang, Z.; Wen, T.; Zhai, C.; Han, J.; Mu, J.; Hou, X.; Xiu-Jian, C.; et al. Performance-boosted triboelectric textile for harvesting human motion energy. Nano Energy 2017, 39, 562–570. [Google Scholar] [CrossRef]
- Hsu, T.-H.; Taylor, J.A.; Krupenkin, T.N. Energy harvesting from aperiodic low frequency motion using reverse electrowetting. Faraday Discuss. 2017, 199, 377–392. [Google Scholar] [CrossRef] [PubMed]
- Hayashida, J.Y. Unobtrusive Integration of Magnetic Generator Systems into Common Footwear. Bachelor’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2000. [Google Scholar]
- Donelan, J.M.; Li, Q.; Naing, V.; Hoffer, J.A.; Weber, D.J.; Kuo, A.D. Biomechanical energy harvesting: Generating electricity during walking with minimal user effort. Science 2008, 319, 807–810. [Google Scholar] [CrossRef] [PubMed]
- Niu, P.; Chapman, P.; Diberardino, L.; Hsiao-Wecksler, E. Design and optimization of a biomechanical energy harvesting device. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 4062–4069. [Google Scholar] [CrossRef]
- Rome, L.C.; Flynn, L.; Goldman, E.M.; Yoo, T.D. Generating electricity while walking with loads. Science 2005, 309, 1725–1728. [Google Scholar] [CrossRef] [PubMed]
- Dąbrowska, A.; Bartkowiak, G.; Pękosławski, B.; Starzak, Ł. Comprehensive evaluation of a photovoltaic energy harvesting system in smart clothing for mountain rescuers. IET Renew. Power Gener. 2020, 14, 3200–3208. [Google Scholar] [CrossRef]
- Ampy Move Teardown and Review. Available online: https://drop-kicker.com/2016/01/ampy-move-teardown-and-review/ (accessed on 25 November 2020).
- Li, K.; He, Q.; Wang, J.; Zhou, Z.; Li, X. Wearable energy harvesters generating electricity from low-frequency human limb movement. Microsyst. Nanoeng. 2018, 4. [Google Scholar] [CrossRef] [PubMed]
- NEO-6: U-Blox 6 GPS Modules: Data Sheet. Available online: https://www.u-blox.com/sites/default/files/products/documents/NEO-6_DataSheet_(GPS.G6-HW-09005).pdf (accessed on 25 November 2020).
- AMPY MOVE: Power Your Devices from Your Motion. Available online: https://www.kickstarter.com/projects/1071086547/ampy-power-your-devices-from-your-motion (accessed on 20 November 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Speed (km/h) | Tilt (%) | Motion Type |
|---|---|---|---|
| WD3 | 3 | 15 | Downhill |
| WU3 | 3 | 15 | Uphill |
| WF3 | 3 | 0 | On flat |
| WF8 | 8 | 0 | On flat |
| Motion Type | Speed (km/h) | Trial Number | Processed Waveform Duration (s) |
|---|---|---|---|
| Uphill | 3 | 1 | 20.1 |
| Uphill | 3 | 2 | 19.4 |
| Uphill | 3 | 3 | 19.2 |
| Downhill | 3 | 1 | 19.7 |
| Downhill | 3 | 2 | 20.0 |
| Downhill | 3 | 3 | 20.2 |
| On flat | 3 | 1 | 19.4 |
| On flat | 3 | 2 | 21.0 |
| On flat | 3 | 3 | 20.2 |
| On flat | 3 | 4 | 18.9 |
| Uphill | 3 | 4 | 20.5 |
| Uphill | 3 | 1 | 20.1 |
| Uphill | 3 | 2 | 19.4 |
| Downhill | 3 | 1 | 19.7 |
| Downhill | 3 | 2 | 20.0 |
| Downhill | 3 | 3 | 20.2 |
| On flat | 8 | 1 | 20.7 |
| On flat | 8 | 2 | 20.7 |
| On flat | 8 | 3 | 21.6 |
| On flat | 8 | 4 | 19.2 |
| Uphill | 3 | 3 | 19.2 |
| Uphill | 3 | 4 | 20.5 |
| Uphill | 3 | 1 | 20.1 |
| Downhill | 3 | 1 | 19.7 |
| Downhill | 3 | 2 | 20.0 |
| Downhill | 3 | 3 | 20.2 |
| On flat | 3 | 1 | 19.4 |
| On flat | 3 | 2 | 21.0 |
| On flat | 3 | 3 | 20.2 |
| On flat | 3 | 4 | 18.9 |
| Uphill | 3 | 2 | 19.4 |
| Uphill | 3 | 3 | 19.2 |
| Uphill | 3 | 4 | 20.5 |
| Downhill | 3 | 1 | 19.7 |
| Downhill | 3 | 2 | 20.0 |
| Downhill | 3 | 3 | 20.2 |
| On flat | 8 | 1 | 20.7 |
| On flat | 8 | 2 | 20.7 |
| On flat | 8 | 3 | 21.6 |
| On flat | 8 | 4 | 19.2 |
| Motion Type | Speed (km/h) | Overall Duration (s) | Share in the Scenario (%) |
|---|---|---|---|
| Uphill | 3 | 237.48 | 29.7 |
| Downhill | 3 | 239.48 | 29.9 |
| On flat | 3 | 159.14 | 19.9 |
| On flat | 8 | 164.28 | 20.5 |
| Battery State | Attempt No. | Charge Delivered (mC) | Average Current (mA) | Error (%) | ||||
|---|---|---|---|---|---|---|---|---|
| In-field | Electronic Model | In-field | Electronic Model | Computer Simulation | Electronic Model | Computer Simulation | ||
| Immediately after Discharge | 1 | 11.56 | 12.34 | 0.547 | 0.584 | 6.7 | ||
| 2 | 9.72 | 10.35 | 0.473 | 0.504 | 6.6 | |||
| 3 | 12.43 | 13.26 | 0.612 | 0.652 | 6.7 | |||
| 4 | 11.55 | 12.89 | 0.602 | 0.672 | 11.6 | |||
| 5 | 9.72 | 10.13 | 0.474 | 0.494 | 4.3 | |||
| After First Test Round and Resting | 1 | 11.56 | 10.14 | 0.547 | 0.480 | 0.391 | −12.3 | −28.3 |
| 2 | 9.72 | 8.39 | 0.473 | 0.409 | 0.330 | −13.7 | −30.3 | |
| 3 | 12.43 | 11.01 | 0.612 | 0.541 | 0.448 | −11.5 | −26.7 | |
| 4 | 11.55 | 10.74 | 0.602 | 0.560 | 0.463 | −7.0 | −23.1 | |
| 5 | 9.72 | 8.55 | 0.474 | 0.417 | 0.333 | −12.0 | −29.6 | |
| Test Environment | System Operating Time (mm:ss) |
|---|---|
| Real Terrain | 56:19 |
| Electronic Model | 63:41 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pękosławski, B.; Starzak, Ł.; Dąbrowska, A.; Bartkowiak, G. Evaluation Methodology of a Smart Clothing Biomechanical Energy Harvesting System for Mountain Rescuers. Sensors 2021, 21, 905. https://doi.org/10.3390/s21030905
Pękosławski B, Starzak Ł, Dąbrowska A, Bartkowiak G. Evaluation Methodology of a Smart Clothing Biomechanical Energy Harvesting System for Mountain Rescuers. Sensors. 2021; 21(3):905. https://doi.org/10.3390/s21030905
Chicago/Turabian StylePękosławski, Bartosz, Łukasz Starzak, Anna Dąbrowska, and Grażyna Bartkowiak. 2021. "Evaluation Methodology of a Smart Clothing Biomechanical Energy Harvesting System for Mountain Rescuers" Sensors 21, no. 3: 905. https://doi.org/10.3390/s21030905
APA StylePękosławski, B., Starzak, Ł., Dąbrowska, A., & Bartkowiak, G. (2021). Evaluation Methodology of a Smart Clothing Biomechanical Energy Harvesting System for Mountain Rescuers. Sensors, 21(3), 905. https://doi.org/10.3390/s21030905