
Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview

 ,
,  and
and
Abstract
1. Introduction
2. Related Works
3. Background
3.1. Unmanned Aerial Vehicles
3.2. Cognitive Radio Networks
- spectrum sensing: identifies the available spectrum and detects PUs when operating in a licensed band,
- spectrum management: selects the best available channel,
- spectrum sharing: coordinates accessibility to the available channel with other users, and
- spectrum mobility: vacates the channel when a PU arrives.
4. CR-Based UAVs
4.1. The Need for CR-Based UAVs
4.1.1. Security
4.1.2. Energy Efficiency
4.1.3. Spectrum Scarcity
4.1.4. Application Requirements
4.2. Potential Applications
4.2.1. Internet of Flying Things
4.2.2. UAV-Aided 5G
4.3. Hardware Characteristics
4.4. Software Characteristics
4.4.1. Spectrum Sensing
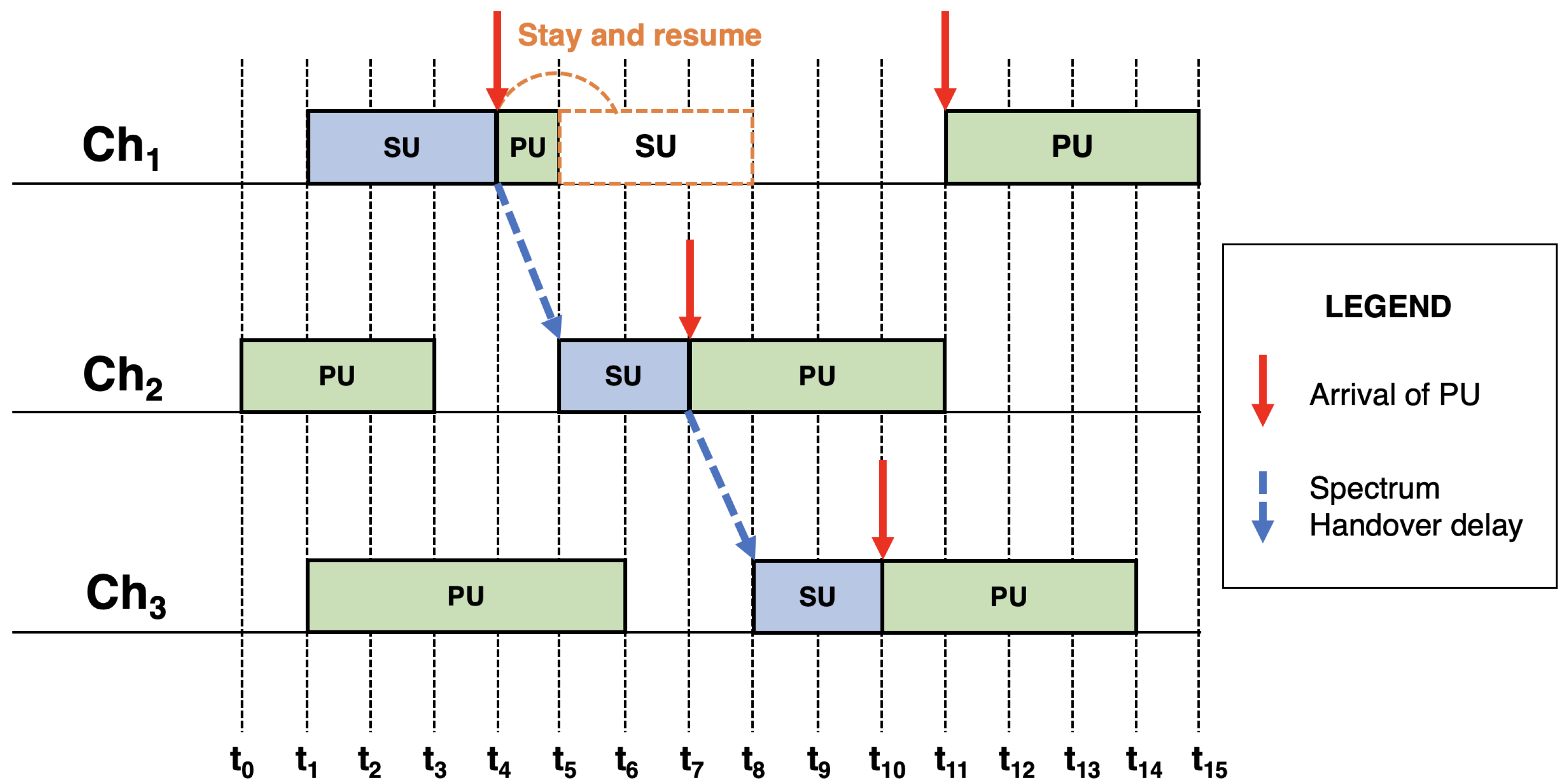
4.4.2. Spectrum Handover
4.4.3. Simulation Tools
4.5. Spectrum Mobility
5. Developing a Simple and Low-Cost CR-Based UAV Testbed
5.1. The Testbed Components
5.2. Outdoor Radio Data Collection of a Jamming Attack
6. State-of-the-Art of CR-Based UAVs
- non-English publications. Although we used English language keywords, we found a few publications in other languages. We had to exclude them merely because we would not be able to analyze them in depth;
- papers that are not downloadable online;
- publications that are not related to CR, SDR, or UAVs as defined in this work (other research fields);
- papers focusing on CR or SDR applications other than UAVs wireless communication.
- the work presents a theoretical analysis (Q1);
- the work presents practical results (Q2);
- the work involves a real SDR-based UAV (Q3);
- the work is centered on CR-based UAVs (Q4);
- the work involves a real CR-based UAV (Q5).
7. Challenges and Future Research Directions
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AERPAW | Aerial Experimentation and Research Platform for Advanced Wireless |
| ANN | Artificial Neural Network |
| B5G | beyond 5G |
| CR | Cognitive Radio |
| DSA | Dynamic Spectrum Access |
| ETSI | European Telecommunications Standards Institute |
| FANETs | Flying Ad hoc Networks |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| HMM | Hidden Markov Model |
| IoFT | Internet of Flying Things |
| IoT | Internet of Things |
| ITU | International Telecommunications Union |
| MAC | Medium Access Control |
| ML | Machine Learning |
| PU | Primary User |
| QoS | Quality of Service |
| SCF | Spectral Correlation Function |
| SDR | Software-Defined Radio |
| SNR | Ratio of Signal to Noise |
| SpecPSO | Spectrum Particle Swarm Optimization |
| SU | Secondary User |
| UAS | Unmanned Aerial Systems |
| UAV | Unmanned Aerial Vehicle |
| URLLC | Ultra-Reliable and Low Latency |
| USRP | Universal Software Radio Peripheral |
| WARP | The Wireless Open-Access Research Platform |
| Wi-FI | Wireless Network |
References
- Valavanis, K.P.; Vachtsevanos, G.J. (Eds.) Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; p. 3022. [Google Scholar] [CrossRef]
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; Aerospace Series; Wiley: Chichester, UK, 2010. [Google Scholar]
- de Melo Pires, R.; Arnosti, S.Z.; Pinto, A.S.R.; Branco, K.R.L.J.C. Experimenting Broadcast Storm Mitigation Techniques in FANETs. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016; pp. 5868–5877. [Google Scholar] [CrossRef]
- Arnosti, S.Z.; Pires, R.M.; Branco, K.R.L.J.C. Evaluation of Cryptography Applied to Broadcast Storm Mitigation Algorithms in FANETs. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1368–1377. [Google Scholar] [CrossRef]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-Connected UAV: Potential, Challenges and Promising Technologies. IEEE Wirel. Commun. 2019, 26, 120–127. [Google Scholar] [CrossRef]
- Gershenfeld, N.; Krikorian, R.; Cohen, D. The Internet of Things. Sci. Am. 2004, 291, 76–81. [Google Scholar] [CrossRef] [PubMed]
- Fernando, P.D.; Mariana, R.; Vitor, C.F.J.; Roschildt, P.A.S.; James, S.; Castelo, B.K.R.L.J. The Internet of Flying Things. In Internet of Things A to Z; Wiley-Blackwell: Hoboken, NJ, USA, 2018; Chapter 19; pp. 529–562. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- Saleem, Y.; Rehmani, M.H.; Zeadally, S. Integration of Cognitive Radio Technology with unmanned aerial vehicles: Issues, opportunities, and future research challenges. J. Netw. Comput. Appl. 2015, 50, 15–31. [Google Scholar] [CrossRef]
- Reyes, H.; Gellerman, N.; Kaabouch, N. A Cognitive Radio System for Improving the Reliability and Security of UAS/UAV Networks. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Mitola, J. Cognitive Radio: An Integrated Agent Architecture for Software Defined Radio, Doctor of Technology. Ph.D. Dissertation, Royal Institute of Technology, Stockholm, Sweden, 2000; pp. 271–350. [Google Scholar]
- Akpakwu, G.A.; Silva, B.J.; Hancke, G.P.; Abu-Mahfouz, A.M. A Survey on 5G Networks for the Internet of Things: Communication Technologies and Challenges. IEEE Access 2018, 6, 3619–3647. [Google Scholar] [CrossRef]
- Chourabi, H.; Nam, T.; Walker, S.; Gil-Garcia, J.R.; Mellouli, S.; Nahon, K.; Pardo, T.A.; Scholl, H.J. Understanding Smart Cities: An Integrative Framework. In Proceedings of the 2012 45th Hawaii International Conference on System Sciences, Maui, HI, USA, 4–7 January 2012; pp. 2289–2297. [Google Scholar] [CrossRef]
- Powell, K.; Abdalla, A.S.; Brennan, D.; Marojevic, V.; Barts, R.M.; Panicker, A.; Ozdemir, O.; Guvenc, I. Software Radios for Unmanned Aerial Systems. In Proceedings of the OpenWireless’20, 1st International Workshop on Open Software Defined Wireless Networks; Association for Computing Machinery: New York, NY, USA, 2020; pp. 14–20. [Google Scholar] [CrossRef]
- Jacob, P.; Sirigina, R.P.; Madhukumar, A.S.; Prasad, V.A. Cognitive Radio for Aeronautical Communications: A Survey. IEEE Access 2016, 4, 3417–3443. [Google Scholar] [CrossRef]
- Bento, M.D.F. (Ed.) Unmanned Aerial Vehicles: An Overview; Inside GNSS: Hoboken, NJ, USA, 2008; pp. 54–61. [Google Scholar]
- Dà-Jiāng Innovations Science and Technology Co., Ltd. DJI—The Future of Possible. Available online: https://www.dji.com/ (accessed on 15 November 2020).
- European Telecommunications Standards Institute. TErms and Definitions Database Interactive (TEDDI). Available online: https://webapp.etsi.org/Teddi/ (accessed on 15 November 2020).
- Baldini, G.; Sturman, T.; Biswas, A.R.; Leschhorn, R.; Godor, G.; Street, M. Security Aspects in Software Defined Radio and Cognitive Radio Networks: A Survey and A Way Ahead. IEEE Commun. Surv. Tutor. 2012, 14, 355–379. [Google Scholar] [CrossRef]
- International Telecommunications Union. Book of ITU-R Resolutions. Available online: https://www.itu.int/pub/R-VADM-RES-2019 (accessed on 12 January 2021).
- Santana, G.M.D.; Cristo, R.S.; Diguet, J.P.; Dezan, C.; Osorio Diana, P.M.; Branco Kalinka, R.L.J.C. A Case Study of Primary User Arrival Prediction Using the Energy Detector and the Hidden Markov Model in Cognitive Radio Networks. In Proceedings of the 2019 IEEE Symposium on Computers and Communications (ISCC), Barcelona, Spain, 29 June–3 July 2019; pp. 1195–1198. [Google Scholar] [CrossRef]
- Hardkernel Co., Ltd. ODROID|Hardkernel. Available online: https://www.hardkernel.com/ (accessed on 15 November 2020).
- Raspberry Pi Foundation. Raspberry Pi—Teach, Learn, and Make with Raspberry Pi. Available online: https://www.raspberrypi.org/ (accessed on 15 November 2020).
- Texas Instruments. BeagleBoard.org—Community Supported Open Hardware Computers for Making. Available online: https://beagleboard.org/ (accessed on 8 August 2018).
- Ettus Research. USRP—Universal Software Radio Peripheral. Available online: https://www.ettus.com/ (accessed on 15 November 2020).
- Rice University. WARP—Wireless Open-Access Research Platform. Available online: http://warpproject.org/ (accessed on 15 November 2020).
- Young, A.R.; Bostian, C.W. Simple and Low-Cost Platforms for Cognitive Radio Experiments [Application Notes]. IEEE Microw. Mag. 2013, 14, 146–157. [Google Scholar] [CrossRef]
- Hosseini, N.; Matolak, D.W. Software Defined Radios as Cognitive Relays for Satellite Ground Stations Incurring Terrestrial Interference. In Proceedings of the 2017 Cognitive Communications for Aerospace Applications Workshop (CCAA), Cleveland, OH, USA, 27–28 June 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Zeng, K.; Ramesh, S.K.; Yang, Y. Location Spoofing Attack and its Countermeasures in Database-Driven Cognitive Radio Networks. In Proceedings of the 2014 IEEE Conference on Communications and Network Security, San Francisco, CA, USA, 29–31 October 2014; pp. 202–210. [Google Scholar] [CrossRef]
- Li, L.; Zhou, X.; Xu, H.; Li, G.Y.; Wang, D.; Soong, A. Energy-Efficient Transmission in Cognitive Radio Networks. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Thomas, J.; Menon, P.P. A Survey on Spectrum Handoff in Cognitive Radio Networks. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Naqvi, S.A.R.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-Aided Communication as a Key Enabler for 5G and Resilient Public Safety Networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef]
- Ma’sum, M.A.; Arrofi, M.K.; Jati, G.; Arifin, F.; Kurniawan, M.N.; Mursanto, P.; Jatmiko, W. Simulation of Intelligent Unmanned Aerial Vehicle (UAV) For Military Surveillance. In Proceedings of the 2013 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Bali, Indonesia, 28–29 September 2013; pp. 161–166. [Google Scholar] [CrossRef]
- Barrado, C.; Messeguer, R.; Lopez, J.; Pastor, E.; Santamaria, E.; Royo, P. Wildfire Monitoring Using a Mixed Air-Ground Mobile Network. IEEE Pervasive Comput. 2010, 9, 24–32. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.d.; Ribeiro, A.; Rossi, C. An Air-Ground Wireless Sensor Network for Crop Monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef]
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; et al. Imaging from an Unmanned Aerial Vehicle: Agricultural Surveillance and Decision Support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Berni, J.A.; Suárez, L.; Fereres, E. A New Era in Remote Sensing of Crops with Unmanned Robots. SPIE Newsroom 2008. [Google Scholar] [CrossRef]
- Kanistras, K.; Martins, G.; Rutherford, M.J.; Valavanis, K.P. A Survey of Unmanned Aerial Vehicles (UAVs) for Traffic Monitoring. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 221–234. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, P.; Vuran, M.C.; Al-Rodhaan, M.A.; Al-Dhelaan, A.M.; Akyildiz, I.F. BorderSense: Border Patrol through Advanced Wireless Sensor Networks. Ad Hoc Netw. 2011, 9, 468–477. [Google Scholar] [CrossRef]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as Aerial Sensor Network for Disaster Management applications. e & i Elektrotechnik und Informationstechnik 2010, 127, 56–63. [Google Scholar] [CrossRef]
- Neto, J.M.M.; da Paixão, R.A.; Rodrigues, L.R.L.; Moreira, E.M.; dos Santos, J.C.J.; Rosa, P.F.F. A Surveillance Task for a UAV in a Natural Disaster Scenario. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 1516–1522. [Google Scholar] [CrossRef]
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV Systems for Natural Disaster Management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- The Institute. Will Delivery By Drone Become a Reality? Available online: http://theinstitute.ieee.org/ieee-roundup/members/achievements/will-delivery-by-drone-become-a-reality (accessed on 11 February 2018).
- Gorcin, A.; Arslan, H. Public Safety and Emergency Case Communications: Opportunities from the Aspect of Cognitive Radio. In Proceedings of the 2008 3rd IEEE Symposium on New Frontiers in Dynamic Spectrum Access Networks, Chicago, IL, USA, 14–17 October 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Ghafoor, S.; Sutton, P.D.; Sreenan, C.J.; Brown, K.N. Cognitive Radio for Disaster Response Networks: Survey, Potential, and Challenges. IEEE Wirel. Commun. 2014, 21, 70–80. [Google Scholar] [CrossRef]
- Pegues, J. Drone Over White House Highlights Security Concerns. Available online: https://cbsn.ws/2zG8rtr (accessed on 24 November 2020).
- Chi, T.; Ming, Y.; Tseng; Kuo, S.; Liao, C. Civil UAV Path Planning Algorithm for Considering Connection with Cellular Data Network. In Proceedings of the 2012 IEEE 12th International Conference on Computer and Information Technology, Chengdu, China, 27–29 October 2012; pp. 327–331. [Google Scholar] [CrossRef]
- Abbas, N.; Nasser, Y.; Ahmad, K. Recent Advances on Artificial Intelligence and Learning Techniques in Cognitive Radio Networks. EURASIP J. Wirel. Commun. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Sekander, S.; Tabassum, H.; Hossain, E. Multi-Tier Drone Architecture for 5G/B5G Cellular Networks: Challenges, Trends, and Prospects. IEEE Commun. Mag. 2018, 56, 96–103. [Google Scholar] [CrossRef]
- HOPE Microelectronics. RFM22B FSK Transceiver. Available online: http://www.hoperf.com/rf_transceiver/modules/RFM22BW.html (accessed on 15 November 2020).
- Santana, G.M.D.; Cristo, R.S.; Dezan, C.; Diguet, J.P.; Osorio, D.P.M.; Branco, K.R.L.J.C. Cognitive Radio for UAV Communications: Opportunities and Future Challenges. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems, Dallas, TX, USA, 12–15 June 2018; pp. 7–12. [Google Scholar]
- Malik, S.; Shah, M.; Dar, A.; Haq, A.; Khan, A.; Javed, T.; Khan, S. Comparative Analysis of Primary Transmitter Detection Based Spectrum Sensing Techniques in Cognitive Radio Systems. Aust. J. Basic Appl. Sci. 2010, 4, 4522–4531. [Google Scholar]
- Perera, L.N.T.; Herath, H.M.V.R. Review of Spectrum Sensing in Cognitive Radio. In Proceedings of the 2011 6th International Conference on Industrial and Information Systems, Tiruvannamalai, India, 7–9 January 2011; pp. 7–12. [Google Scholar] [CrossRef]
- Christian, I.; Moh, S.; Chung, I.; Lee, J. Spectrum Mobility in Cognitive Radio Networks. IEEE Commun. Mag. 2012, 50, 114–121. [Google Scholar] [CrossRef]
- Nir, V.L.; Scheers, B. Evaluation of Open-Source Software Frameworks for High Fidelity Simulation of Cognitive Radio Networks. In Proceedings of the 2015 International Conference on Military Communications and Information Systems (ICMCIS), Cracow, Poland, 18–19 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Hossain, E.; Niyato, D.; Kim, D.I. Evolution and Future Trends of Research in Cognitive Radio: A Contemporary Survey. Wirel. Commun. Mob. Comput. 2015, 15, 1530–1564. [Google Scholar] [CrossRef]
- Zheng, J.; Chen, C.; Cheng, J.; Shi, L. Cognitive Radio: Methods for the Detection of Free Bands. In Proceedings of the 2009 International Conference on Networks Security, Wireless Communications and Trusted Computing, Wuhan, China, 25–26 April 2009; Volume 2, pp. 343–345. [Google Scholar] [CrossRef]
- Abdelrassoul, R.; Fathy, E.; Zaghloul, M.S. Comparative Study of Spectrum Sensing for Cognitive Radio System Using Energy Detection over Different Channels. In Proceedings of the 2016 World Symposium on Computer Applications Research (WSCAR); 2016; pp. 32–35. [Google Scholar] [CrossRef]
- Kim, H.; Shin, K.G. In-band Spectrum Sensing in Cognitive Radio Networks: Energy Detection or Feature Detection? In Proceedings of the MobiCom ’08, 14th ACM International Conference on Mobile Computing and Networking, San Francisco, CA, USA, 14–19 September 2008; ACM: New York, NY, USA, 2008; pp. 14–25. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Lee, W.Y.; Vuran, M.C.; Mohanty, S. A Survey on Spectrum Management in Cognitive Radio Networks. IEEE Commun. Mag. 2008, 46, 40–48. [Google Scholar] [CrossRef]
- Kapoor, S.; Rao, S.; Singh, G. Opportunistic Spectrum Sensing by Employing Matched Filter in Cognitive Radio Network. In Proceedings of the 2011 International Conference on Communication Systems and Network Technologies, Katra, India, 3–5 June 2011; pp. 580–583. [Google Scholar] [CrossRef]
- Oner, M.; Jondral, F. On the Extraction of the Channel Allocation Information in Spectrum Pooling Systems. IEEE J. Sel. Areas Commun. 2007, 25, 558–565. [Google Scholar] [CrossRef][Green Version]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation Issues in Spectrum Sensing for Cognitive Radios. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; Volume 1, pp. 772–776. [Google Scholar] [CrossRef]
- Popoola, J.J.; van Olst, R. Application of Neural Network for Sensing Primary Radio Signals in a Cognitive Radio Environment. In Proceedings of the IEEE AFRICON’11, Livingstone, Zambia, 13–15 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Wu, M.; Liu, C. Cooperative Spectrum Sensing Based on Artificial Neural Network for Cognitive Radio Systems. In Proceedings of the 2012 8th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Matinmikko, M.; Ser, J.D.; Rauma, T.; Mustonen, M. Fuzzy-Logic Based Framework for Spectrum Availability Assessment in Cognitive Radio Systems. IEEE J. Sel. Areas Commun. 2013, 31, 2173–2184. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. A Comprehensive Survey on Spectrum Sensing in Cognitive Radio Networks: Recent Advances, New Challenges, and Future Research Directions. Sensors 2019, 19, 126. [Google Scholar] [CrossRef]
- Tavares, C.H.A.; Marinello, J.C.; Proenca, M.L., Jr.; Abrao, T. Machine Learning-Based Models for Spectrum Sensing in Sooperative Radio Networks. IET Commun. 2020, 14, 3102–3109. [Google Scholar] [CrossRef]
- Trigui, E.; Esseghir, M.; Merghem-Boulahia, L. Multi-Agent Systems Negotiation Approach for Handoff in Mobile Cognitive Radio Networks. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Pham, C.; Tran, N.H.; Do, C.T.; Moon, S.I.; Hong, C.S. Spectrum Handoff Model Based on Hidden Markov Model in Cognitive Radio Networks. In Proceedings of the International Conference on Information Networking 2014 (ICOIN2014), Phuket, Thailand, 10–12 February 2014; pp. 406–411. [Google Scholar] [CrossRef]
- Anandakumar, H.; Umamaheswari, K. Supervised Machine Learning Techniques in Cognitive Radio Networks During Cooperative Spectrum Handovers. Clust. Comput. 2017, 20, 1505–1515. [Google Scholar] [CrossRef]
- GNU Radio. The Free and Open Software Radio Ecosystem. Available online: https://www.gnuradio.org/ (accessed on 15 November 2020).
- Nir, V.L. CogWave: Open-Source Software Framework for Cognitive Radio Waveform Design. Available online: https://github.com/vlenircissrma/CogWave (accessed on 15 November 2020).
- OpenSim Ltd. Omnet++: Discrete Event Simulator. Available online: https://www.omnetpp.org/ (accessed on 15 November 2020).
- GeorgiaTech. NS-3—A Discrete-Event Network Simulator for Internet Systems. Available online: https://www.nsnam.org/ (accessed on 15 November 2020).
- Instruments, N. LabVIEW—Laboratory Virtual Instrument Engineering Workbench. Available online: http://www.ni.com/en-us/shop/labview.html (accessed on 15 November 2020).
- MathWorks. Simulink—Simulation and Model-Based Design. Available online: https://www.mathworks.com/products/simulink.html (accessed on 15 November 2020).
- OpenSim Ltd. INET Framework for OMNeT++. Available online: https://inet.omnetpp.org/ (accessed on 15 November 2020).
- Pathak, M.; Dhurandher, S.K.; Woungang, I.; Tushir, B.; Kumar, V.; Takizawa, M.; Barolli, L. Power Control Scheme for Underlay Approach in Cognitive Radio Networks. In Proceedings of the 2016 19th International Conference on Network-Based Information Systems (NBiS), Ostrava, Czech Republic, 7–9 September 2016; pp. 114–118. [Google Scholar] [CrossRef]
- Noor, N.M.; Din, N.M.; Ahmed, E.; Kadir, A.N.A. OMNET++ Based Cognitive Radio Simulation Network. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016; pp. 28–33. [Google Scholar] [CrossRef]
- Abeywardana, R.C.; Sowerby, K.W.; Berber, S.M. SimuCRV: A Simulation Framework for Cognitive Radio Enabled Vehicular Ad Hoc Networks. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gkionis, G.; Michalas, A.; Sgora, A.; Vergados, D.D. An Effective Spectrum Handoff Scheme for Cognitive Radio Ad hoc Networks. In Proceedings of the 2017 Wireless Telecommunications Symposium (WTS), Chicago, IL, USA, 26–28 April 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Wu, Y.; Cardei, M. A Cognitive Radio Approach for Data Collection in Border Surveillance. In Proceedings of the 2016 IEEE 35th International Performance Computing and Communications Conference (IPCCC), Las Vegas, NV, USA, 9–11 December 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Bansal, T.; Li, D.; Sinha, P. Opportunistic Channel Sharingin Cognitive Radio Networks. IEEE Trans. Mob. Comput. 2014, 13, 852–865. [Google Scholar] [CrossRef]
- Xie, J.; Wan, Y.; Kim, J.H.; Fu, S.; Namuduri, K. A Survey and Analysis of Mobility Models for Airborne Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1221–1238. [Google Scholar] [CrossRef]
- Hanif, I.; Zeeshan, M.; Ahmed, A. Traffic Pattern Based Adaptive Spectrum Handoff Strategy for Cognitive Radio Networks. In Proceedings of the 2016 10th International Conference on Next Generation Mobile Applications, Security and Technologies (NGMAST), Cardiff, UK, 24–26 August 2016; pp. 18–23. [Google Scholar] [CrossRef]
- Lertsinsrubtavee, A.; Malouch, N.; Fdida, S. Controlling Spectrum Handoff with a Delay Requirement in Cognitive Radio Networks. In Proceedings of the 2012 21st International Conference on Computer Communications and Networks (ICCCN), Munich, Germany, 30 July–2 August 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, Q.; Liu, X.; Kwak, K.S. Delay-Constrained Optimal Transmission With Proactive Spectrum Handoff in Cognitive Radio Networks. IEEE Trans. Commun. 2016, 64, 2767–2779. [Google Scholar] [CrossRef]
- DJI. DJI Phantom 4—Specs, FAQ, Tutorials and Downloads. Available online: https://www.dji.com/phantom-4/info (accessed on 15 November 2020).
- Korpela, C.M.; Danko, T.W.; Oh, P.Y. MM-UAV: Mobile Manipulating Unmanned Aerial Vehicle. J. Intell. Robot. Syst. 2012, 65, 93–101. [Google Scholar] [CrossRef]
- RTL-SDR. RTL-SDR (RTL2832U) and Software Defined Radio News and Projects. Also Featuring Airspy, HackRF, FCD, SDRplay and More. Available online: https://www.rtl-sdr.com/ (accessed on 15 November 2020).
- Parrot. Camera Drones and Applications|Official Parrot Site. Available online: https://www.parrot.com/ (accessed on 15 November 2020).
- Parrot. Parrot for Developers. Available online: https://developer.parrot.com/ (accessed on 15 November 2020).
- EarToEarOak. EarToEarOak/RLTSDR-Scanner: A Cross Platform Python Frequency Scanning GUI for the OsmoSDR rtl-sdr Library. Available online: https://github.com/EarToEarOak/RTLSDR-Scanner (accessed on 15 November 2020).
- Chen, H.; Kung, H.T.; Vlah, D.; Hague, D.; Muccio, M.; Poland, B. Collaborative Compressive Spectrum Sensing in a UAV Environment. In Proceedings of the 2011—MILCOM 2011 Military Communications Conference, Baltimore, MD, USA, 7–10 November 2011; pp. 142–148. [Google Scholar] [CrossRef]
- Miko, G.; Nemeth, A. Combined Communication and Radio Navigation System for Small UAVs. In Proceedings of the 2013 23rd International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 16–17 April 2013; pp. 284–287. [Google Scholar] [CrossRef]
- Harounabadi, M.; Puschmann, A.; Artemenko, O.; Mitschele-Thiel, A. TAG: Trajectory Aware Geographical Routing in Cognitive Radio Ad Hoc Networks with UAV Nodes. In Ad Hoc Networks; Mitton, N., Kantarci, M.E., Gallais, A., Papavassiliou, S., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 111–122. [Google Scholar]
- Brown, T.X.; McHenry, M.; Jaroonvanichkul, S. Cognitive Radio Architectures for Unmanned Aircraft Systems. In Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 813–844. [Google Scholar] [CrossRef]
- Guevara, K.; Rodriguez, M.; Gallo, N.; Velasco, G.; Vasudeva, K.; Guvenc, I. UAV-based GSM Network for Public Safety Communications. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015; pp. 1–2. [Google Scholar] [CrossRef]
- Anderson, A.; Frew, E.W.; Grunwald, D. Cognitive Radio Development for UAS Applications. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 695–703. [Google Scholar] [CrossRef]
- Mikó, G.; Németh, A. SCFDM Based Communication System for UAV Applications. In Proceedings of the 2015 25th International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 21–22 April 2015; pp. 222–224. [Google Scholar] [CrossRef]
- Andryeyev, O.; Artemenko, O.; Mitschele-Thiel, A. Improving the System Capacity Using Directional Antennas with a Fixed Beam on Small Unmanned Aerial Vehicles. In Proceedings of the 2015 European Conference on Networks and Communications (EuCNC), Paris, France, 29 June–2 July 2015; pp. 139–143. [Google Scholar] [CrossRef]
- VonEhr, K.; Hilaski, S.; Dunne, B.E.; Ward, J. Software Defined Radio for direction-finding in UAV wildlife tracking. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 464–469. [Google Scholar] [CrossRef]
- Tato, A.; Mosquera, C.; Gomez, I. Link Adaptation in Mobile Satellite Links: Field Trials Results. In Proceedings of the 2016 8th Advanced Satellite Multimedia Systems Conference and the 14th Signal Processing for Space Communications Workshop (ASMS/SPSC), Palma de Mallorca, Spain, 5–7 September 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Murphy, S.O.; Brown, K.N.; Sreenan, C. Demo: Cellphone Localisation Using an Autonomous Unmanned Aerial Vehicle and Software Defined Radio. In Proceedings of the EWSN2017, 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 254–255. [Google Scholar]
- Sboui, L.; Ghazzai, H.; Rezki, Z.; Alouini, M. Energy-Efficient Power Allocation for UAV Cognitive Radio Systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Gutierrez, R.M.; Yu, H.; Rong, Y.; Bliss, D.W. Time and Frequency Dispersion Characteristics of the UAS Wireless Channel in Residential and Mountainous Desert Terrains. In Proceedings of the 2017 14th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; pp. 516–521. [Google Scholar] [CrossRef]
- Gonzalez, J.D.T.; Fung, W. A Pilot Study on Aeronautical Surveillance System for Drone Delivery Using Heterogeneous Software Defined Radio Framework. In Proceedings of the 2017 IEEE International Conference on Real-time Computing and Robotics (RCAR), Okinawa, Japan, 14–18 July 2017; pp. 499–504. [Google Scholar] [CrossRef]
- Horapong, K.; Chandrucka, D.; Montree, N.; Buaon, P. Design and Use of “Drone” to Support the Radio Navigation Aids Flight Inspection. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, E.; Zambrano, J.; Amrhar, A.; Landry, R.; Ajib, W. Design and Implementation of a Wideband Radio Using SDR for Avionic Applications. In Proceedings of the 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2017; pp. 2D2-1–2D2-9. [Google Scholar] [CrossRef]
- Ghazzai, H.; Ghorbel, M.B.; Kadri, A.; Hossain, M.J.; Menouar, H. Energy-Efficient Management of Unmanned Aerial Vehicles for Underlay Cognitive Radio Systems. IEEE Trans. Green Commun. Netw. 2017, 1, 434–443. [Google Scholar] [CrossRef]
- Cai, X.; Gonzalez-Plaza, A.; Alonso, D.; Zhang, L.; Rodríguez, C.B.; Yuste, A.P.; Yin, X. Low Altitude UAV Propagation Channel Modelling. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 1443–1447. [Google Scholar] [CrossRef]
- Noble, J.; Liem, D.T.; Tuan, N.Q.; Luat, D.; Asharif, M.R. Battalion-Organic Electronic Fires: A Tactical Application of Commercial Unmanned Systems and Software-Defined Radios. In Proceedings of the 2017 Third Asian Conference on Defence Technology (ACDT), Phuket, Thailand, 18–20 January 2017; pp. 20–25. [Google Scholar] [CrossRef]
- Petrolo, R.; Lin, Y.; Knightly, E. ASTRO: Autonomous, Sensing, and Tetherless netwoRked drOnes. In Proceedings of the DroNet’18, 4th ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Munich, Germany, 10–15 June 2018; ACM: New York, NY, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Shi, Y.; Wensowitch, J.; Ward, A.; Badi, M.; Camp, J. Building UAV-Based Testbeds for Autonomous Mobility and Beamforming Experimentation. In Proceedings of the 2018 IEEE International Conference on Sensing, Communication and Networking (SECON Workshops), Hong Kong, China, 11 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Huang, Y.; Xu, J.; Qiu, L.; Zhang, R. Cognitive UAV Communication via Joint Trajectory and Power Control. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Shi, Y.; Enami, R.; Wensowitch, J.; Camp, J. UABeam: UAV-Based Beamforming System Analysis with In-Field Air-to-Ground Channels. In Proceedings of the 2018 15th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Hong Kong, China, 11–13 June 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Liu, X.; Guan, M.; Zhang, X.; Ding, H. Spectrum Sensing Optimization in an UAV-Based Cognitive Radio. IEEE Access 2018, 6, 44002–44009. [Google Scholar] [CrossRef]
- Sklivanitis, G.; Gannon, A.; Tountas, K.; Pados, D.A.; Batalama, S.N.; Reichhart, S.; Medley, M.; Thawdar, N.; Lee, U.; Matyjas, J.D.; et al. Airborne Cognitive Networking: Design, Development, and Deployment. IEEE Access 2018. [Google Scholar] [CrossRef]
- Pärlin, K.; Alam, M.M.; Moullec, Y.L. Jamming of UAV Remote Control Systems Using Software Defined Radio. In Proceedings of the 2018 International Conference on Military Communications and Information Systems (ICMCIS), Warsaw, Poland, 22–23 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Dunne, B.E.; Keenlance, P. Drones and Satellites: Identifying Interdisciplinary Capstone Projects with Other Departments at Your Own University. In Proceedings of the 2018 ASEE Annual Conference & Exposition, Salt Lake City, UT, USA, 23 June 2018; Available online: https://peer.asee.org/30345 (accessed on 15 November 2020).
- Shamaei, K.; Khalife, J.; Kassas, Z.M. Exploiting LTE Signals for Navigation: Theory to Implementation. IEEE Trans. Wirel. Commun. 2018, 17, 2173–2189. [Google Scholar] [CrossRef]
- Jadon, A.; Williams, Z.T.; Kafka, C.; Rotta, H.; Roy, S.; Lum, C.W. A Database System Architecture for Air-to-Ground UAS Link Characterization. In Proceedings of the 2018 AIAA Information Systems–AIAA Infotech@Aerospace, Kissimmee, FL, USA, 8–12 January 2018; American Institute of Aeronautics and Astronautics: Salt Lake City, UT, USA, 2018. [Google Scholar] [CrossRef]
- Torabi, A.; Shafer, M.W.; Vega, G.S.; Rothfus, K.M. UAV-RT: An SDR Based Aerial Platform for Wildlife Tracking. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, W.; Wang, S.; Yan, S.; He, J. An Efficient Wideband Spectrum Sensing Algorithm for Unmanned Aerial Vehicle Communication Networks. IEEE Internet Things J. 2019, 6, 1768–1780. [Google Scholar] [CrossRef]
- Pan, Y.; Da, X.; Hu, H. Joint Optimization of Sensing Time and Power Allocation for UAV Cognitive Radio Systems. In Proceedings of the ICCIP ’19, 5th International Conference on Communication and Information Processing, Chongqing, China, 15–17 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 254–258. [Google Scholar] [CrossRef]
- Shen, F.; Ding, G.; Wang, Z.; Wu, Q. UAV-Based 3D Spectrum Sensing in Spectrum-Heterogeneous Networks. IEEE Trans. Veh. Technol. 2019, 68, 5711–5722. [Google Scholar] [CrossRef]
- Aftab, F.; Khan, A.; Zhang, Z. Hybrid Self-Organized Clustering Scheme for Drone Based Cognitive Internet of Things. IEEE Access 2019, 7, 56217–56227. [Google Scholar] [CrossRef]
- Adane, Y. A Smart Digital Software Radio Transceiver Design Concept for UAV and Autonomous Vehicles Application. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, UAE, 26 March–10 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Almasoud, A.M.; Kamal, A.E. Data Dissemination in IoT Using a Cognitive UAV. IEEE Trans. Cogn. Commun. Netw. 2019, 5, 849–862. [Google Scholar] [CrossRef]
- Matheou, K.J.; Apaza, R.D.; Downey, A.N.; Kerczewski, R.J.; Jung, J.; Ippolito, C.A.; Modi, H. Analysis of at-Altitude LTE Power Spectra for Small Unmanned Aircraft System C2 Communications. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–12. [Google Scholar] [CrossRef]
- Wang, J.; Juarez, N.; Kohm, E.; Liu, Y.; Yuan, J.; Song, H. Integration of SDR and UAS for Malicious Wi-Fi Hotspots Detection. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Murphy, S.O.; Sreenan, C.; Brown, K.N. Autonomous Unmanned Aerial Vehicle for Search and Rescue Using Software Defined Radio. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hasan, N.U.; Zghaibeh, M.; Ejaz, W.; Shahid, A.; Anpalagan, A. On Provision of Resilient Connectivity in Cognitive Unmanned Aerial Vehicles. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Che, Y.L.; Luo, S.; Wu, K. Spectrum Sharing Based Cognitive UAV Networks via Optimal Beamwidth Allocation. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Nie, R.; Xu, W.; Zhang, Z.; Zhang, P.; Pan, M.; Lin, J. Max-Min Distance Clustering Based Distributed Cooperative Spectrum Sensing in Cognitive UAV Networks. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Radišić, T.; Muštra, M.; Andraši, P. Design of an UAV Equipped With SDR Acting as a GSM Base Station. In Proceedings of the 2019 International Conference on Systems, Signals and Image Processing (IWSSIP), Osijek, Croatia, 5–7 June 2019; pp. 31–34. [Google Scholar] [CrossRef]
- ul Hasan, N.; Ejaz, W.; Farooq, U.; Baig, I.; Zghaibeh, M. Adaptive Error Control Framework for a Multihop Cognitive Radio based UAVs for Disaster Management. In Proceedings of the 2019 IEEE 5th International Conference on Mechatronics System and Robots (ICMSR), Singapore, 3–5 May 2019; pp. 87–91. [Google Scholar] [CrossRef]
- Yuheng, Z.; Yan, W.; Yanyong, X. Optimal Sensing Slots Determination for UAV under Correlated Log-Normal Shadowing. In Proceedings of the 2019 IEEE 11th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 12–15 June 2019; pp. 318–321. [Google Scholar] [CrossRef]
- D’Alterio, F.; Ferranti, L.; Bonati, L.; Cuomo, F.; Melodia, T. Quality Aware Aerial-to-Ground 5G Cells through Open-Source Software. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhao, Y.; Luo, S.; Yuan, Z.; Lin, R. A New Spectrum Prediction Method for UAV Communications. In Proceedings of the 2019 IEEE 5th International Conference on Computer and Communications (ICCC), Chengdu, Sichuan, China, 6–9 December 2019; pp. 826–830. [Google Scholar] [CrossRef]
- Mohanti, S.; Bocanegra, C.; Meyer, J.; Secinti, G.; Diddi, M.; Singh, H.; Chowdhury, K. AirBeam: Experimental Demonstration of Distributed Beamforming by a Swarm of UAVs. In Proceedings of the 2019 IEEE 16th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Monterey, CA, USA, 4–7 November 2019; pp. 162–170. [Google Scholar] [CrossRef]
- Liang, X.; Xu, W.; Gao, H.; Pan, M.; Lin, J.; Deng, Q.; Zhang, P. Throughput Optimization for Cognitive UAV Networks: A Three-Dimensional-Location-Aware Approach. IEEE Wirel. Commun. Lett. 2020, 9, 948–952. [Google Scholar] [CrossRef]
- Kornprobst, J.; Mauermayer, R.A.M.; Eibert, T.F. Versatile Low-Cost and Light-Weight RF Equipment for Field Measurements. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–3. [Google Scholar] [CrossRef]
- Bertizzolo, L.; D’Oro, S.; Ferranti, L.; Bonati, L.; Demirors, E.; Guan, Z.; Melodia, T.; Pudlewski, S. SwarmControl: An Automated Distributed Control Framework for Self-Optimizing Drone Networks. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 1768–1777. [Google Scholar] [CrossRef]
- Figueira, N.M.; Niedermeier Belmonte, G.; de Freitas, E.P. C4ISR Systems Applied to Amazonian Constraints*. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 568–572. [Google Scholar] [CrossRef]
- Hasan, N.; Valsalan, P.; Farooq, U.; Baig, I. On the Recovery of Terrestrial Wireless Network using Cognitive UAVs in the Disaster Area. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 819–822. [Google Scholar] [CrossRef]
- AbdulCareem, M.A.; Gomez, J.; Saha, D.; Dutta, A. RFEye in the Sky. IEEE Trans. Comput. 2020. [Google Scholar] [CrossRef]
- Zambrano, J.; Bui, T.; Landry, R.J. Digital Interference Mitigation Technique for the Interoperability of two Airborne two SatCom Systems for Small Aircraft. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Sommer, D.; Chandra Reddy Irigireddy, A.S.; Parkhurst, J.; Nastrucci, E.R. SDR- and UAV-Based Wireless Avionics Intra-Communication Testbed. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, B.; Wan, Y.; Zhou, F.; Wu, Q.; Hu, R.Q. Robust Trajectory and Beamforming Design for Cognitive MISO UAV Networks. IEEE Wirel. Commun. Lett. 2020. [Google Scholar] [CrossRef]
- Krayani, A.; Baydoun, M.; Marcenaro, L.; Gao, Y.; Regazzoni, C.S. Smart Jammer Detection for Self-Aware Cognitive UAV Radios. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, Z.; Salous, S. Spectrum Occupancy Statistics and Time Series Models for Cognitive Radio. J. Signal Process. Syst. 2011, 62, 145–155. [Google Scholar] [CrossRef]
- Yin, L.; Yin, S.; Hong, W.; Li, S. Spectrum Behavior Learning in Cognitive Radio Based on Artificial Neural Network. In Proceedings of the 2011—MILCOM 2011 Military Communications Conference, Baltimore, MD, USA, 7–10 November 2011; pp. 25–30. [Google Scholar] [CrossRef]
- Huang, P.; Liu, C.J.; Xiao, L.; Chen, J. Wireless Spectrum Occupancy Prediction Based on Partial Periodic Pattern Mining. In Proceedings of the 2012 IEEE 20th International Symposium on Modeling, Analysis and Simulation of Computer and Telecommunication Systems, Washington, DC, USA, 7–9 August 2012; pp. 51–58. [Google Scholar] [CrossRef]
- Soleimani, M.T.; Kahvand, M.; Sarikhani, R. Handoff Reduction Based on Prediction Approach in Cognitive Radio Networks. In Proceedings of the 2013 15th IEEE International Conference on Communication Technology, Guilin, Guangxi, China, 17–19 November 2013; pp. 319–323. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Weight (kg) | Altitude (km) | Endurance (h) |
|---|---|---|---|
| Micro | 0.1 | 0.25 | 1 |
| Mini | <30 | 0.15–0.3 | <2 |
| Short range | 200 | 3 | 2–4 |
| Medium range | 150–500 | 3–5 | 30–70 |
| Long range | - | 5 | 6–13 |
| Endurance | 500–1500 | 5–8 | 12–24 |
| Medium altitude, | 1000–1500 | 5–8 | 24–48 |
| long endurance | |||
| High altitude | 2500–12,500 | 15–50 | 24–48 |
| long endurance |
| Publication | Q1 | Q2 | Q3 | Q4 | Q5 |
|---|---|---|---|---|---|
| Chen et al. [95] | |||||
| Young and Bostian [27] | |||||
| Miko and Nemeth [96] | |||||
| Harounabadi et al. [97] | |||||
| Brown et al. [98] | |||||
| Reyes et al. [10] | |||||
| Guevara et al. [99] | |||||
| Anderson et al. [100] | |||||
| Mikó and Németh [101] | |||||
| Andryeyev et al. [102] | |||||
| Saleem et al. [9] | |||||
| VonEhr et al. [103] | |||||
| Jacob et al. [15] | |||||
| Tato et al. [104] | |||||
| Murphy et al. [105] | |||||
| Sboui et al. [106] | |||||
| Gutierrez et al. [107] | |||||
| Gonzalez and Fung [108] | |||||
| Horapong et al. [109] | |||||
| Zhang et al. [110] | |||||
| Ghazzai et al. [111] | |||||
| Cai et al. [112] | |||||
| Noble et al. [113] | |||||
| Petrolo et al. [114] | |||||
| Shi et al. [115] | |||||
| Huang et al. [116] | |||||
| Shi et al. [117] | |||||
| Liu et al. [118] | |||||
| Sklivanitis et al. [119] | |||||
| Pärlin et al. [120] | |||||
| Dunne and Keenlance [121] | |||||
| Shamaei et al. [122] | |||||
| Santana et al. [51] | |||||
| Jadon et al. [123] | |||||
| Torabi et al. [124] | |||||
| Xu et al. [125] | |||||
| Pan et al. [126] | |||||
| Shen et al. [127] | |||||
| Aftab et al. [128] | |||||
| Adane [129] | |||||
| Almasoud and Kamal [130] | |||||
| Matheou et al. [131] | |||||
| Wang et al. [132] | |||||
| Murphy et al. [133] | |||||
| Hasan et al. [134] | |||||
| Che et al. [135] | |||||
| Nie et al. [136] | |||||
| Radišić et al. [137] | |||||
| u. Hasan et al. [138] | |||||
| Yuheng et al. [139] | |||||
| D’Alterio et al. [140] | |||||
| Zhao et al. [141] | |||||
| Mohanti et al. [142] | |||||
| Liang et al. [143] | |||||
| Kornprobst et al. [144] | |||||
| Bertizzolo et al. [145] | |||||
| Figueira et al. [146] | |||||
| Hasan et al. [147] | |||||
| Powell et al. [14] | |||||
| AbdulCareem et al. [148] | |||||
| Zambrano et al. [149] | |||||
| Sommer et al. [150] | |||||
| Liu et al. [151] | |||||
| Krayani et al. [152] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dias Santana, G.M.; Cristo, R.S.d.; Lucas Jaquie Castelo Branco, K.R. Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview. Sensors 2021, 21, 830. https://doi.org/10.3390/s21030830
Dias Santana GM, Cristo RSd, Lucas Jaquie Castelo Branco KR. Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview. Sensors. 2021; 21(3):830. https://doi.org/10.3390/s21030830
Chicago/Turabian StyleDias Santana, Guilherme Marcel, Rogers Silva de Cristo, and Kalinka Regina Lucas Jaquie Castelo Branco. 2021. "Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview" Sensors 21, no. 3: 830. https://doi.org/10.3390/s21030830
APA StyleDias Santana, G. M., Cristo, R. S. d., & Lucas Jaquie Castelo Branco, K. R. (2021). Integrating Cognitive Radio with Unmanned Aerial Vehicles: An Overview. Sensors, 21(3), 830. https://doi.org/10.3390/s21030830