1. Introduction
Radar forward-looking imaging plays an important role in precision guidance, autonomous driving, surface mapping and so on. The bistatic synthetic aperture radar (bistatic SAR) is an effective technology for radar forward-looking imaging [
1,
2,
3]. However, due to the need for bistatic cooperation, it is not applicable in some applications due to the limitation of the platform. Monopulse radar can realize forward-looking imaging [
4], but the imaging scene is greatly limited according to the principle of angle measurement, and the multiple scatters within one beam and one range bin cannot be resolved. The array antenna can also obtain a high-resolution image in the forward-looking region [
5], but it is usually not applicable due to platform limitations.
Recent research has been focused on achieving forward-looking imaging using a real-aperture radar. This radar can realize forward-looking imaging by antenna scanning [
6,
7]. However, since the azimuth resolution
is related to antenna size, i.e.,
where
R is working distance,
is the wave length and
L is antenna size, the azimuth resolution is limited to antenna size. Hence, many researchers have been devoted to solving this problem using signal processing methods.
In mathematics, research shows that the azimuth echo of real-aperture radar can be modeled as the convolution of the antenna pattern and target scattering distribution [
8,
9,
10]. Therefore, current studies are devoted to improving radar azimuth resolution by deconvolution methods, such as Wiener filtering [
11], Tikhonov regularization (TREGU) [
12], truncate singular value decomposition (TSVD) [
13], the Richardson–Lucy (RL) method [
14,
15], iterative adaptive approach (IAA) [
16,
17] and so on. However, the improvement in resolution is limited.
Sparse regularization is an effective method for improving the azimuth resolution because the target of interest is usually sparse in radar forward-looking imaging. In the previous work, we conducted in-depth research on sparse regularization methods [
18,
19]. Typically, the sparse regularization method requires solving an
regularization problem [
20,
21]. Because the
norm is not differentiable, the solution is full of challenges. Split Bregman algorithm (SBA), as an efficient iterative algorithm, has been widely used to solve the challenging problem in many fields, such as imaging deblurring [
22], radar super-resolution imaging [
23], compressed sensing [
24] and so on. In [
18], SBA was utilized to improve the azimuth resolution of radar forward-looking imaging. The results show that SBA has better performance than traditional methods in resolution improvement and noise suppression. However, it is necessary to perform matrix inversion in each iteration. The problem is that the computational complexity of matrix inversion is as high as the third power of
N, which leads to the high computational complexity of the algorithm. In radar imaging, the echo dimension is usually large, and the existence of inversion seriously restricts the calculation efficiency. In our recent study, the high computational complexity of matrix inversion has been decreased by the Gohberg-Semencul (GS) representation [
19] (We named it FSBA in [
19]), which reduces the computational complexity of each iteration from
to
; however, it usually takes hundreds of iterations to converge to the optimal solution. In practical applications, we need the radar to provide clear target information in the imaging area in real time, which confers high requirements for the real-time performance of the radar. The iterations should be further reduced to meet the real-time requirement.
Aiming at the low azimuth resolution of radar forward-looking imaging and the high computational complexity of traditional SBA, a superfast SBA (SFSBA) is proposed in this paper. The low azimuth resolution is improved by solving an
regularization problem. Different from traditional SBA, the proposed SFSBA firstly utilizes the Toeplitz structure of the coefficient matrix, along with the low displacement rank feature of the Toeplitz matrix and realizes fast inversion through the GS representation, reducing the computational complexity of each iteration to
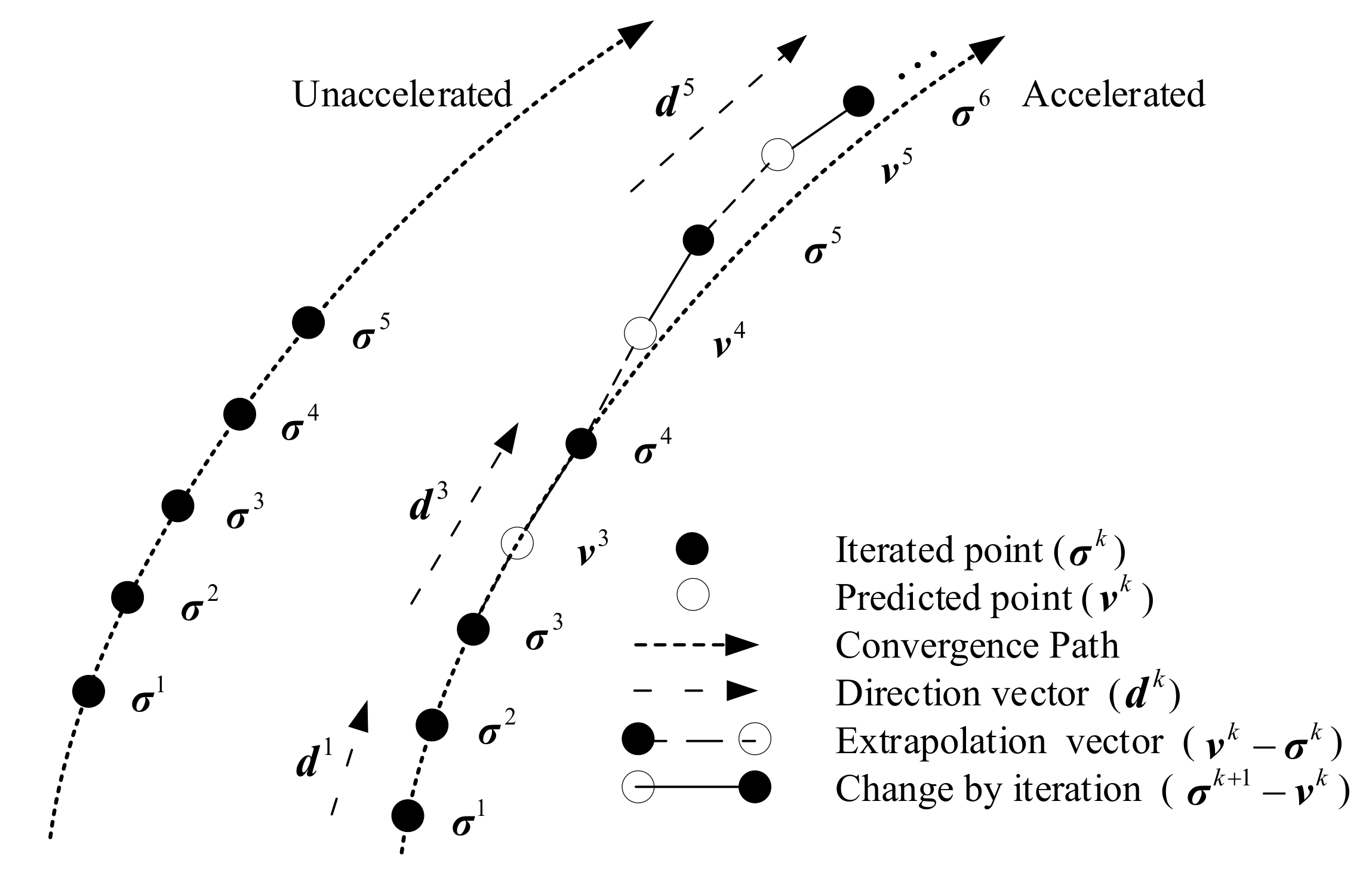
. Then, the iterations are reduced by a two-order vector extrapolation strategy. After vector extrapolation, the next iteration will not start from the current iteration point, but from the predicted point extrapolated from the current iteration point. The application of vector extrapolation will greatly accelerate the convergence speed of the algorithm. Compared with FSBA in [
19], not only the computational complexity of each iteration is decreased, but also the number of iterations is reduced. Finally, the superior performance of the proposed SFSBA is verified by experiments.
The reminder of the paper is structured as follows. In
Section 2, super-resolution imaging is achieved by a traditional solution. In
Section 3, the proposed SFSBA is deduced in detail. In
Section 4, the simulation and real data processing are reported to verify the performance of the proposed algorithm. The conclusion is discussed in
Section 5.
2. Super-Resolution with Traditional SBA
Recent research has proved that after pulse compression and range walk correction [
25], the azimuth echo in radar forward-looking imaging can be modeled as a convolution of target scattering distribution and the antenna pattern [
4], i.e.,
where
is the noise-polluted echo,
is the convolution matrix which is structured by the antenna pattern,
is the target scattering,
is noise and
The target scattering
can be estimated by solving following
regularization problem, i.e.,
where
is the estimation of
,
is the regularization parameter used to balance the resolution improvement and noise amplification and
.
To solve problem (
4), the SBA is used in our work. Because the
is not differentiable, we first employ a variable
to relax it, which leads a constraint problem, i.e.,
The constraint problem (
5) can be converted into an unconstraint problem, i.e.,
where
is a positive parameter.
Based on Bregman iterative criterion, an optimization problem needs to be minimized, i.e., [
18]
One of the advantages of the SBA is variable splitting, which benefit to simplify calculation. The solution to the optimization problem (
7) and (
8) can be achieved by solving three subproblems.
Subproblem 1: Solving
problem. From problem (
7),
problem can be obtained by fixing
and
,
which can be easily solved by direct derivation and using the Gauss–Seidel iteration, i.e.,
where
is the identity matrix.
Subproblem 2: Solving
problem. From problem (
7),
problem can be obtained by fixing
and
,
which can be solved using the iterative shrinkage threshold algorithm [
26], i.e.,
where
.
Subproblem 3: Solving
problem. The
problem can be solved by iterative (
8).
5. Conclusions
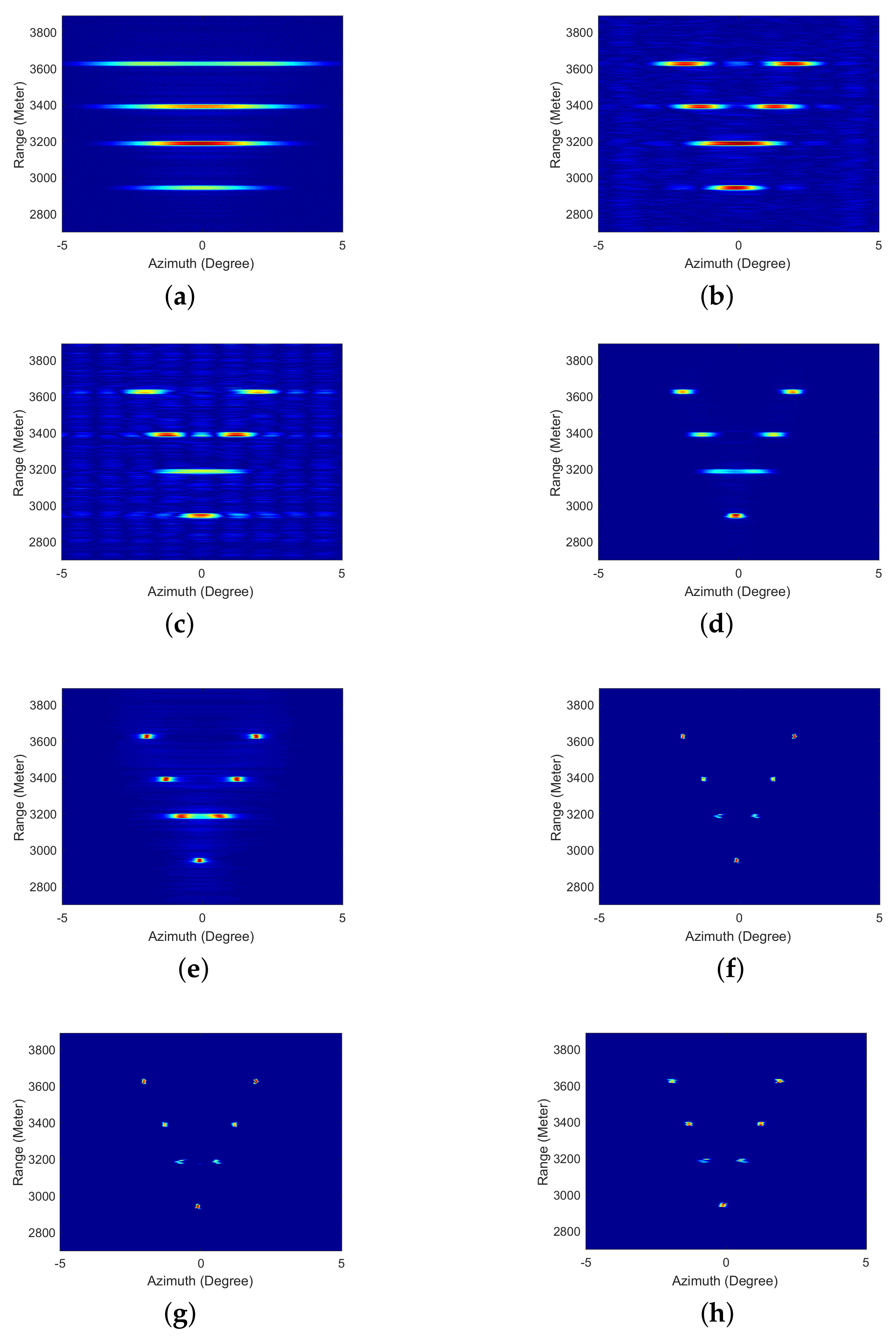
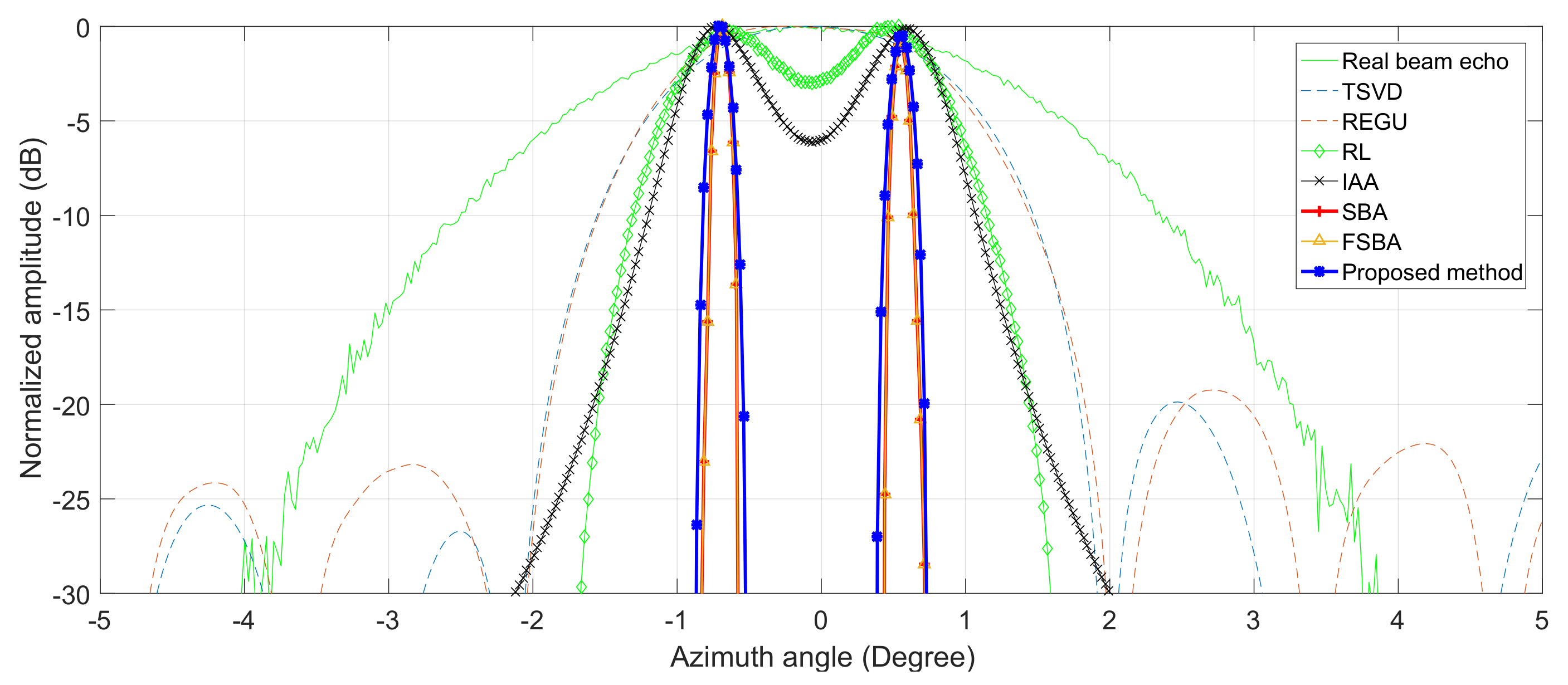
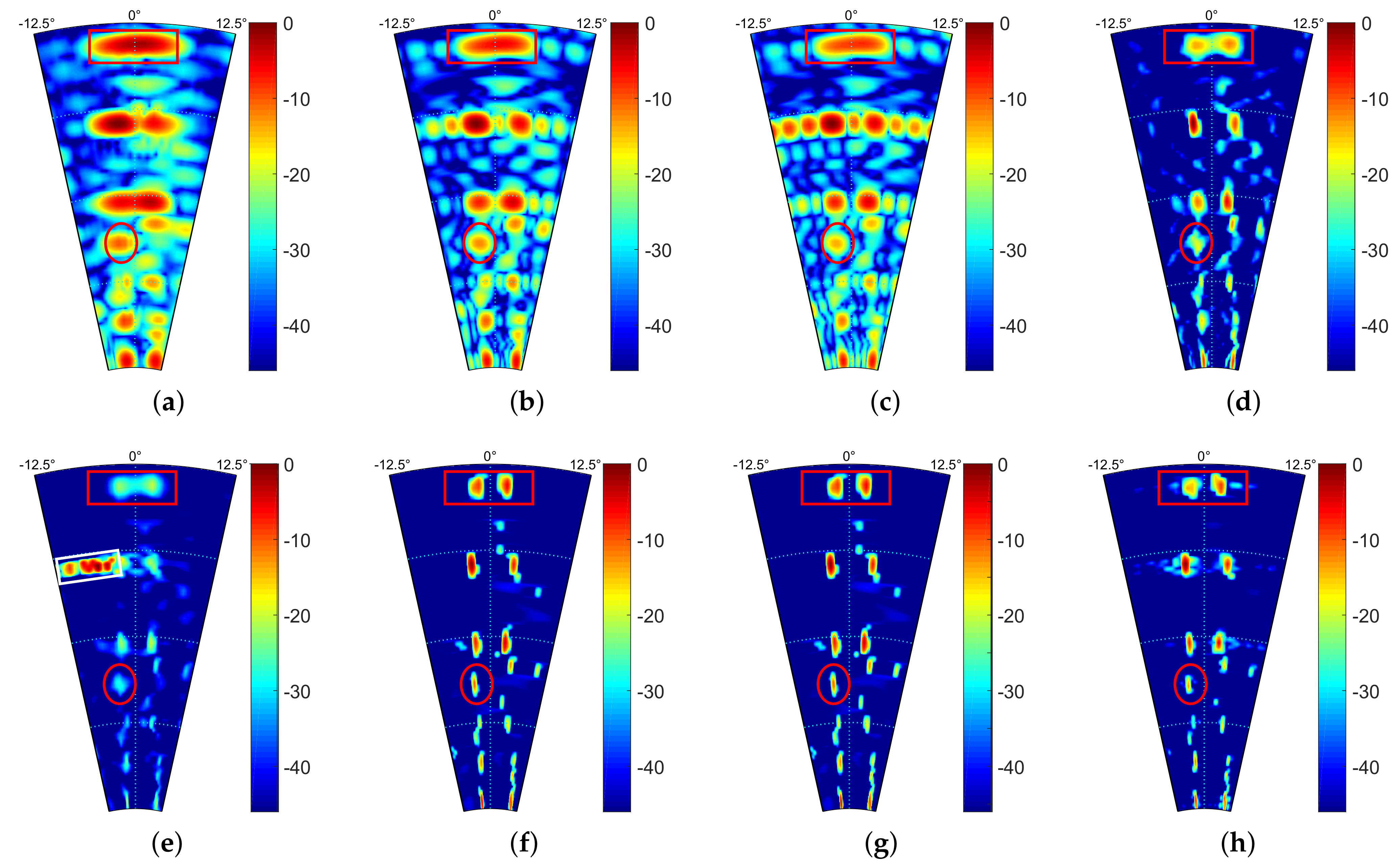
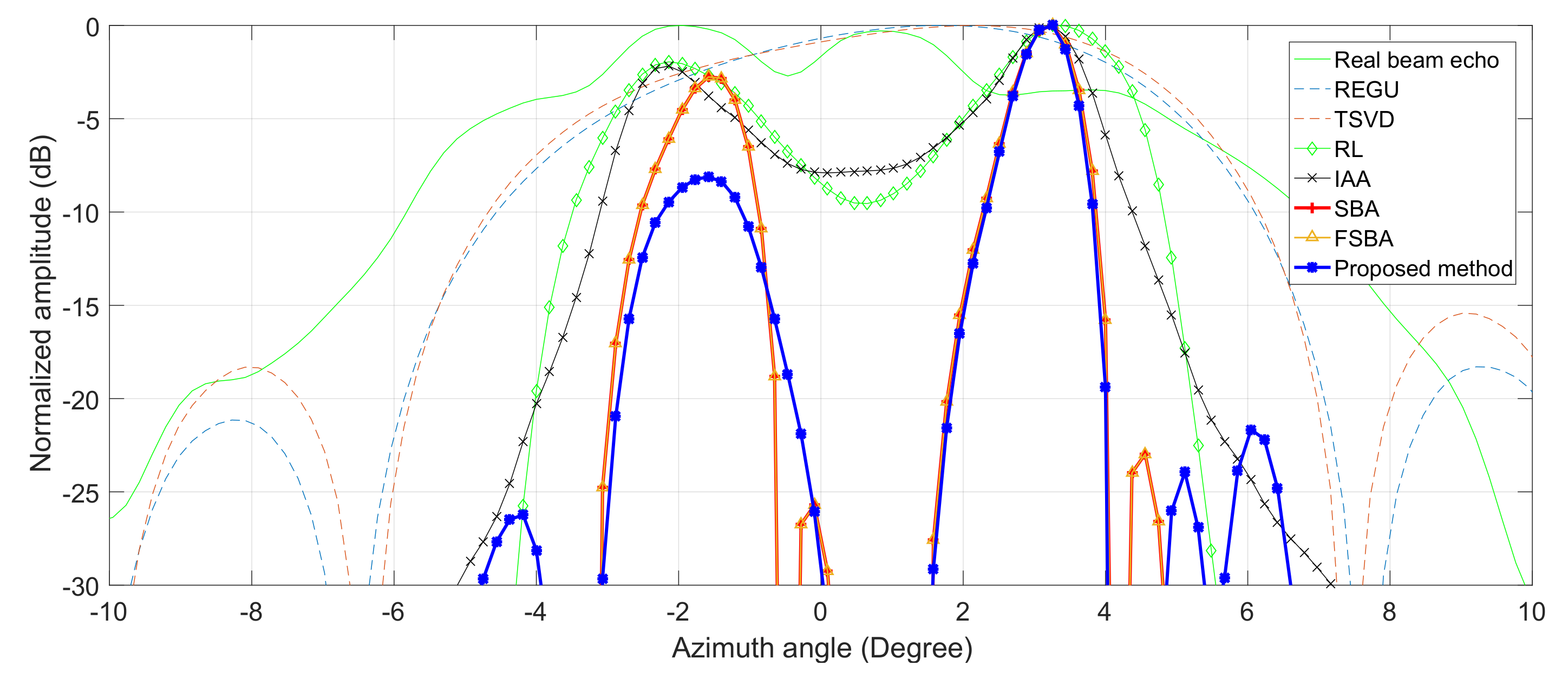
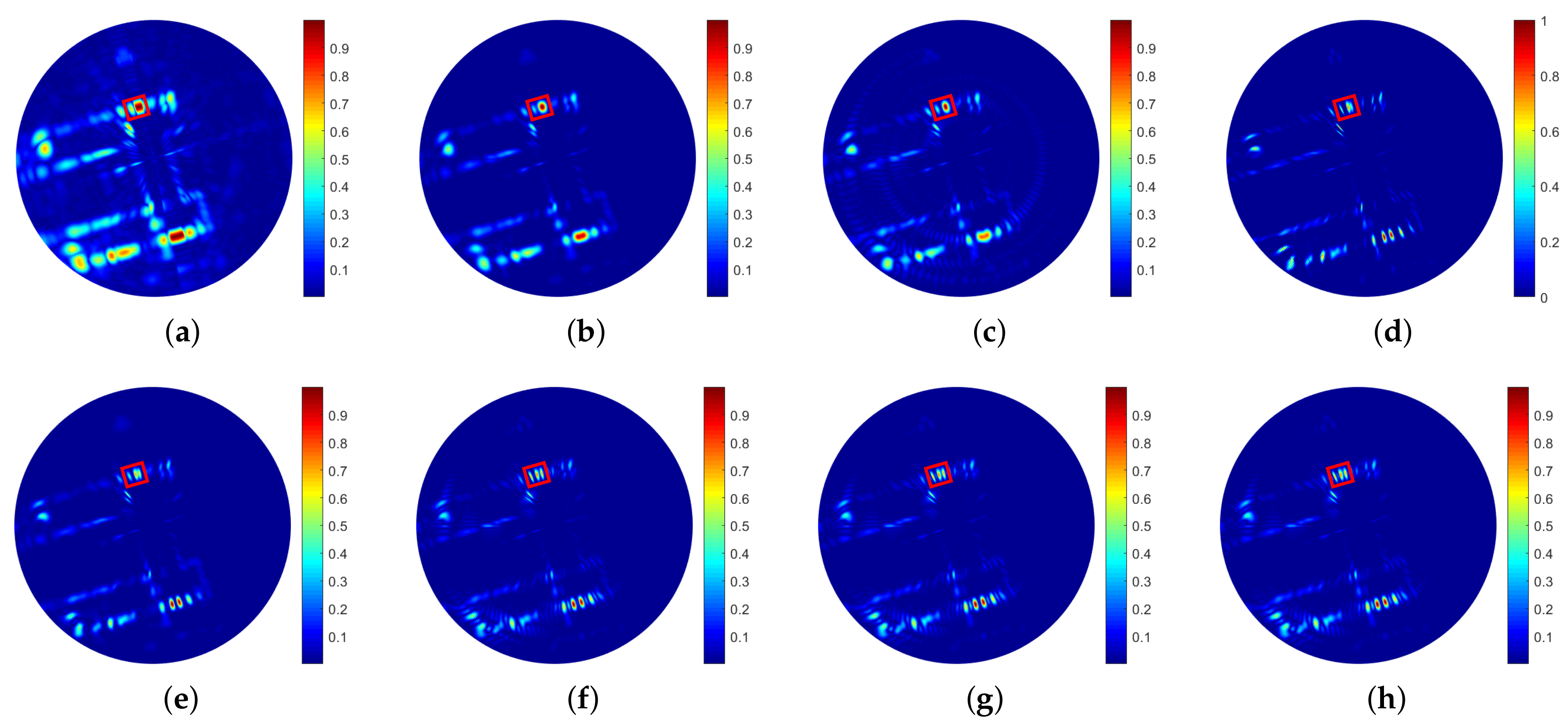
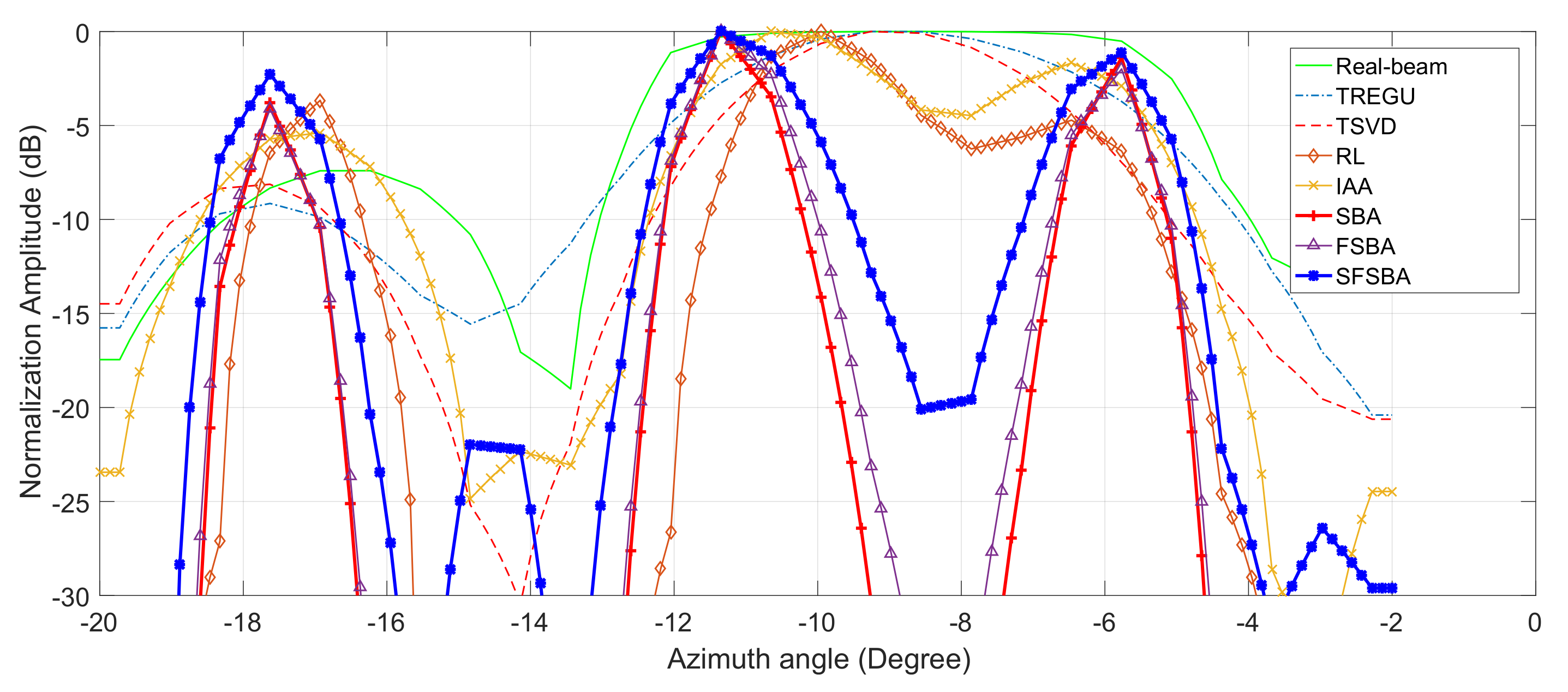
Realizing radar forward-looking super-resolution imaging is extremely important in military and civil fields. Some traditional super-resolution methods face the problem of limited resolution improvement, such as TREGU, TSVD, RL and IAA. Although some methods can significantly improve the resolution, but suffer from high computational complexity or more iterations, such as SBA and FSBA, which cannot meet the real-time requirements in practice.
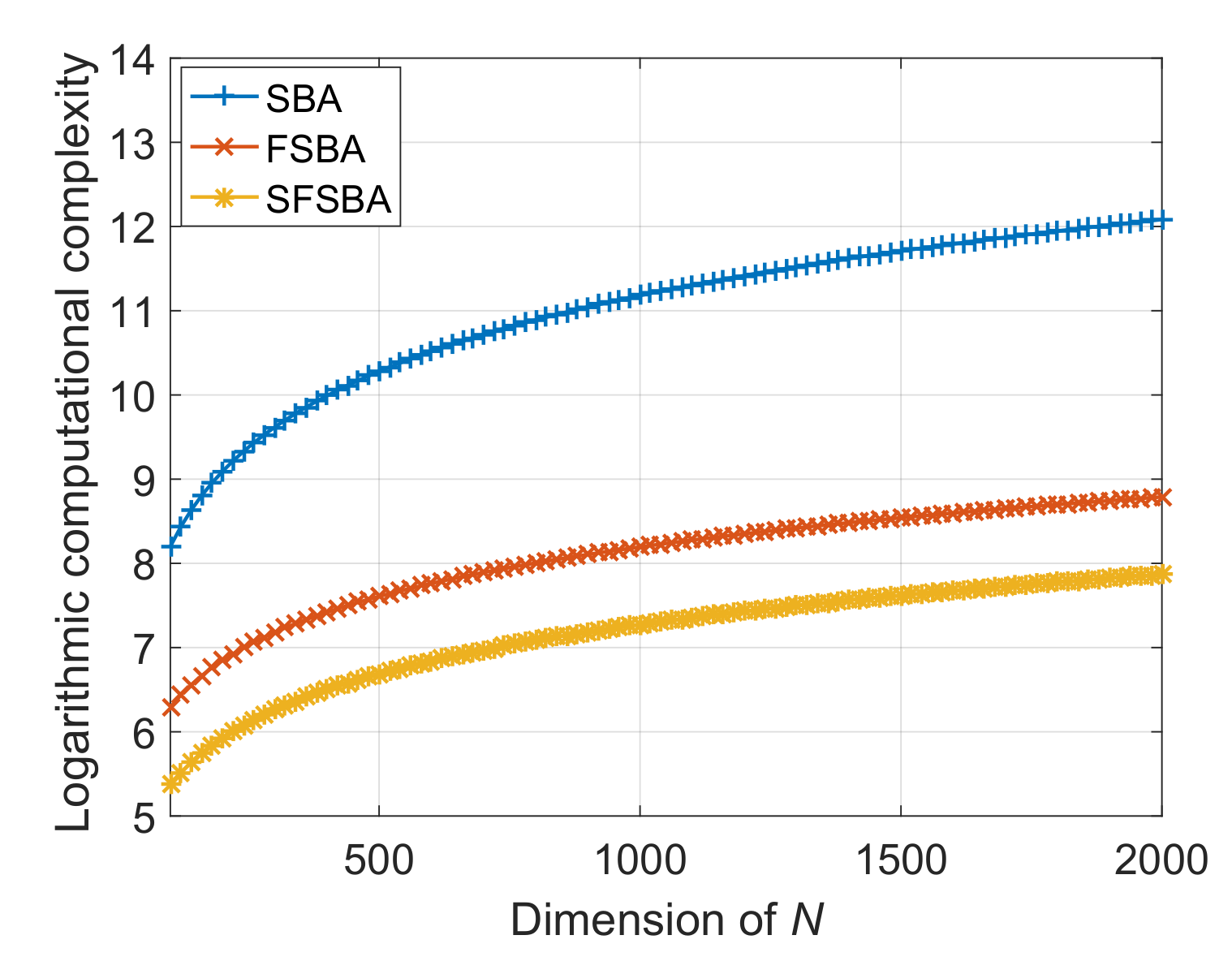
The SFSBA proposed in this paper overcomes these disadvantages. This method uses GS representation to reduce the computational complexity of each iteration, and the iterations are reduced by second-order vector extrapolation. Compared with TREGU, TSVD, RL and IAA, this method can not only effectively improve the azimuth resolution, but also has better computational efficiency than them. Compared with SBA, the computational complexity of each iteration is reduced from to , and the number of iterations is also reduced by about 8 times. In addition, the computational efficiency of SFSBA is about 8 times that of FSBA. The super-resolution performance of SFSBA is only slightly worse than SBA and FSBA. In practical application, the proposed SFSBA can meet the requirements of resolution improvement and real-time performance.
Since the performance degradation of the SFSBA is mainly caused by vector extrapolation, in the future work, we will study higher-order vector extrapolation to minimize the performance degradation.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}