
Enhancing the Tracking of Seedling Growth Using RGB-Depth Fusion and Deep Learning



Abstract
:1. Introduction
2. Materials and Methods
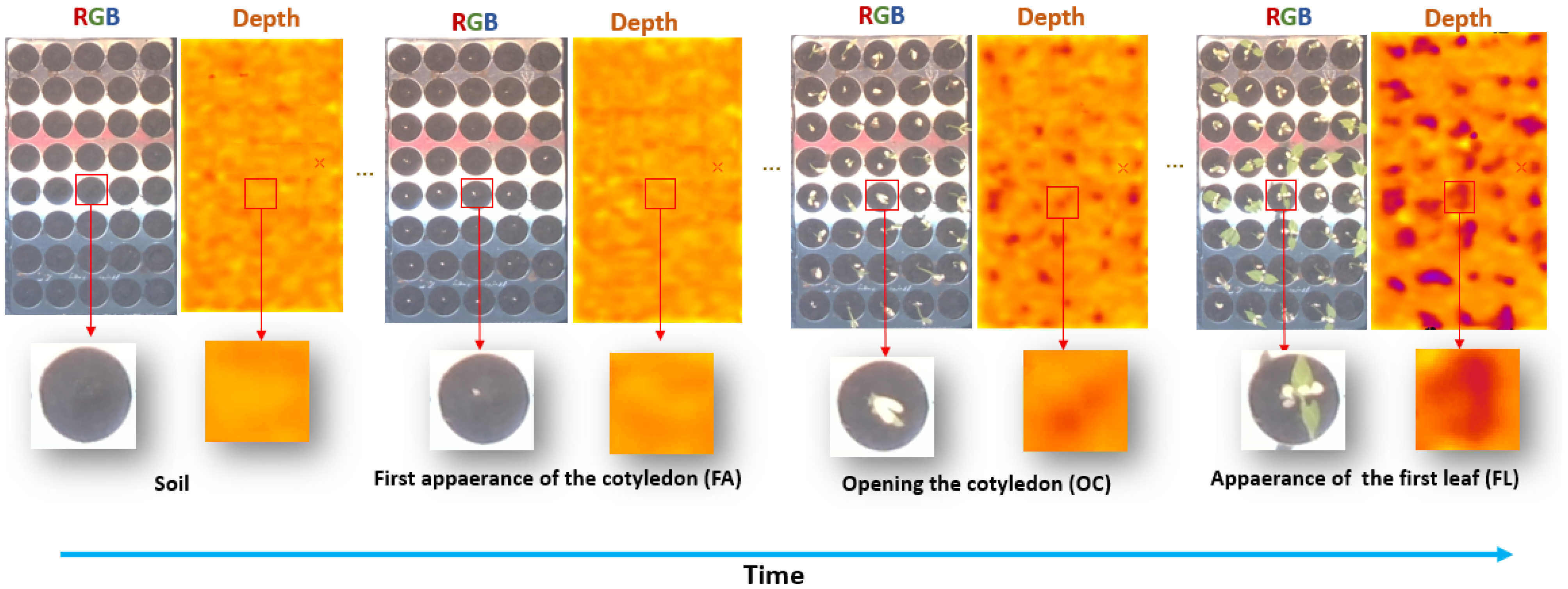
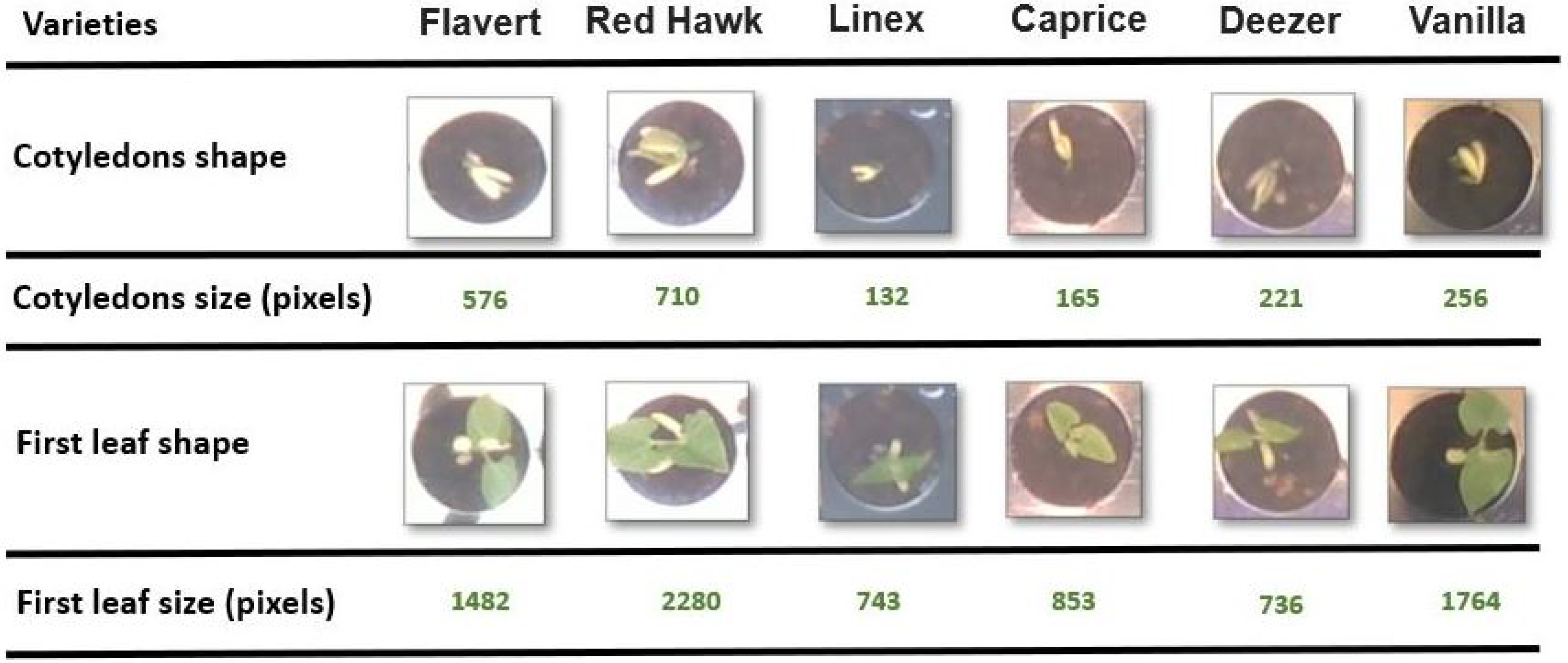
2.1. Imaging System and Data Set
2.2. RGB-Depth Deep Learning Fusion Strategies
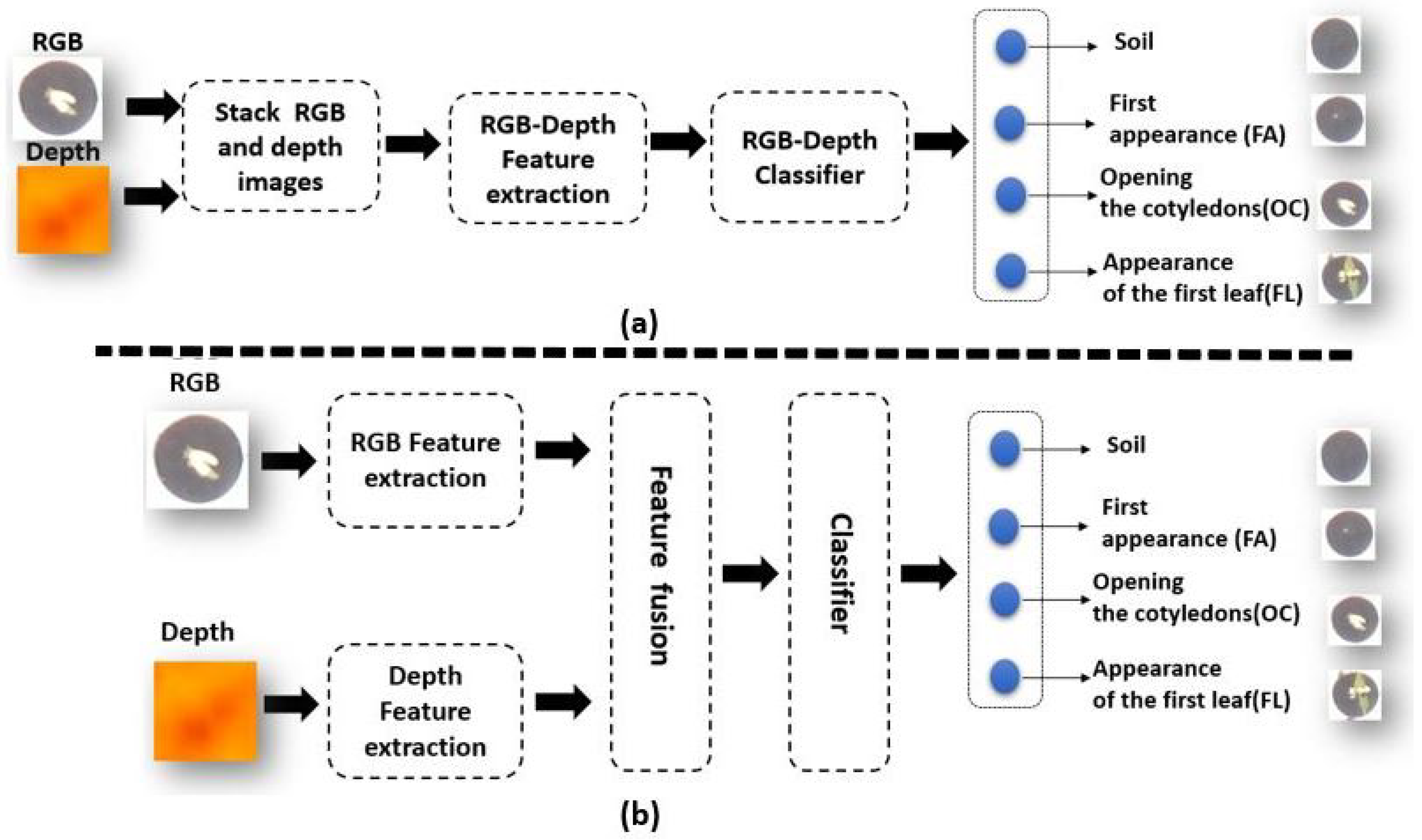
2.2.1. CNN-Based Image Early Fusion Learning Structure
2.2.2. CNN-Based Feature Fusion Learning Structure
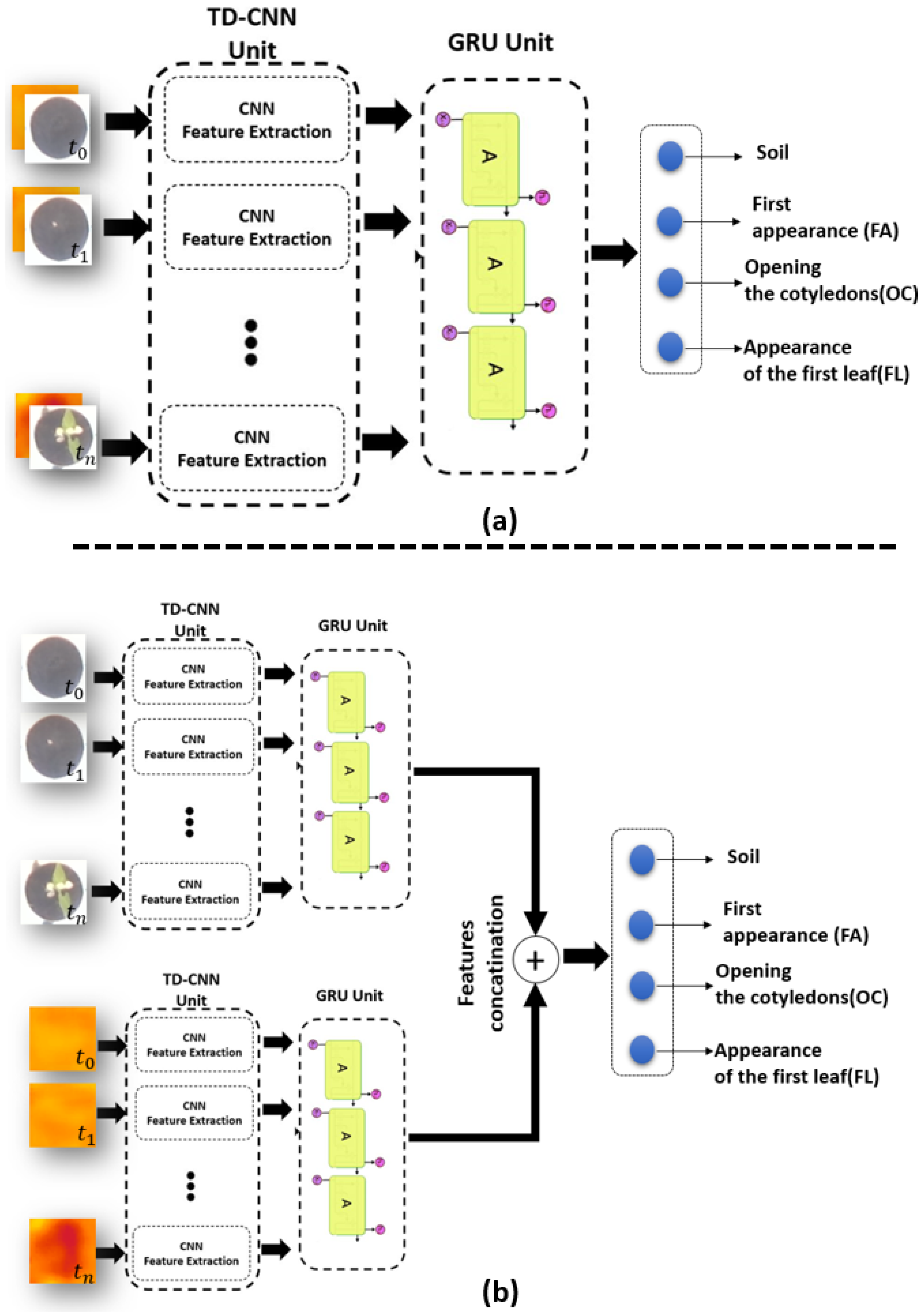
2.2.3. TD-CNN-GRU-Based Image and Feature Fusion Learning Structure
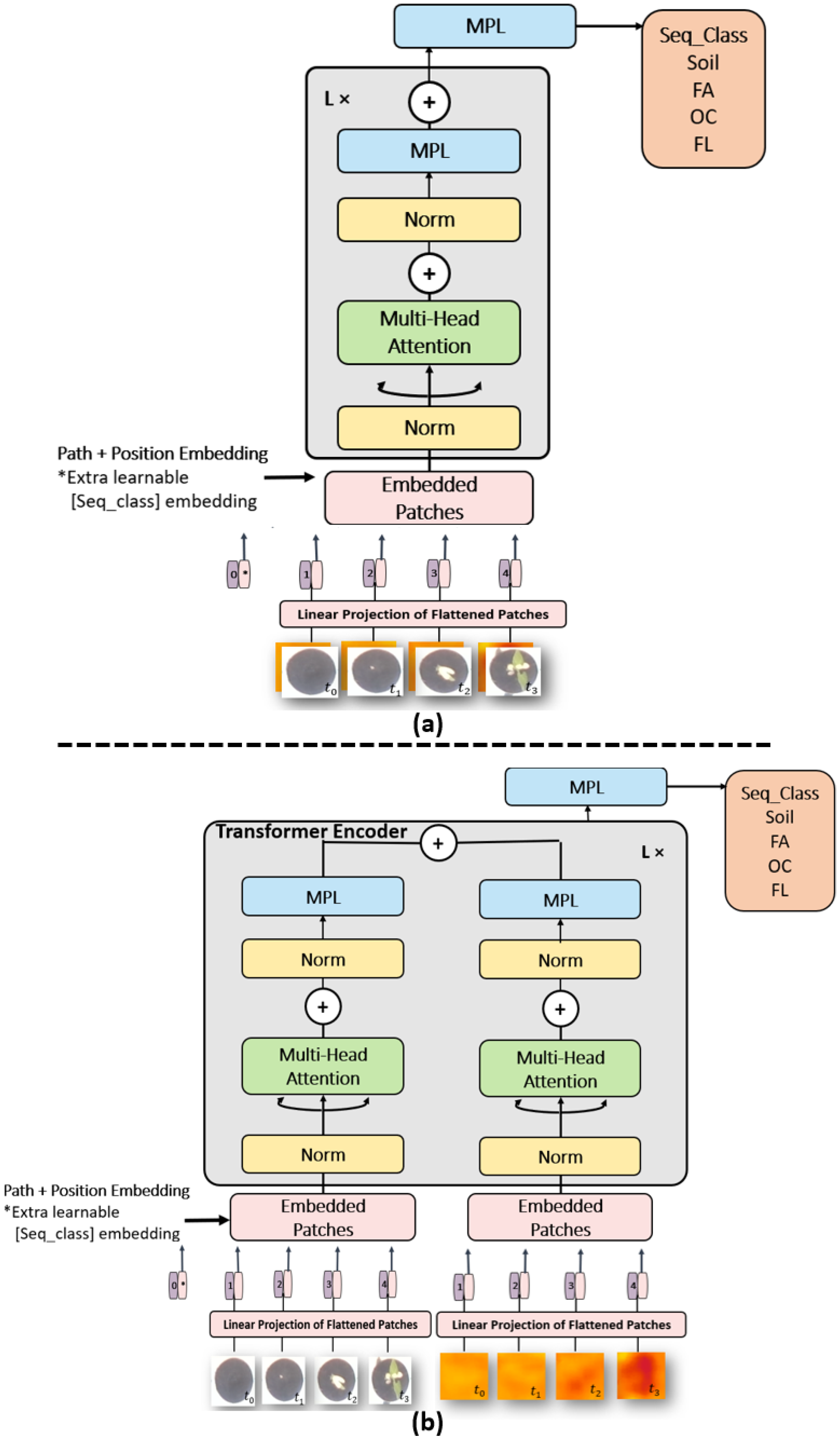
2.2.4. Transformers-Based Image and Feature Fusion Learning Structure
2.3. Accuracy
3. Results
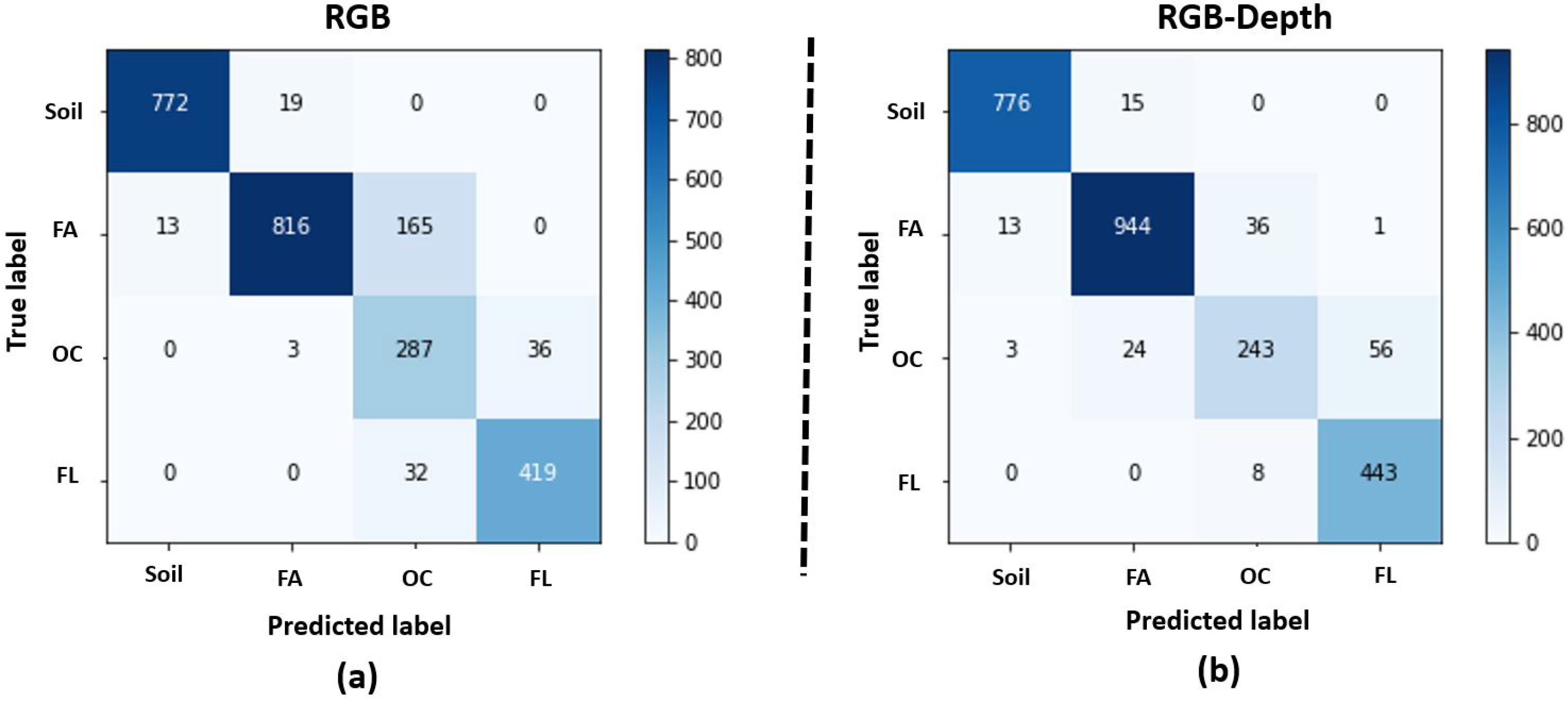
3.1. Fusion Strategies
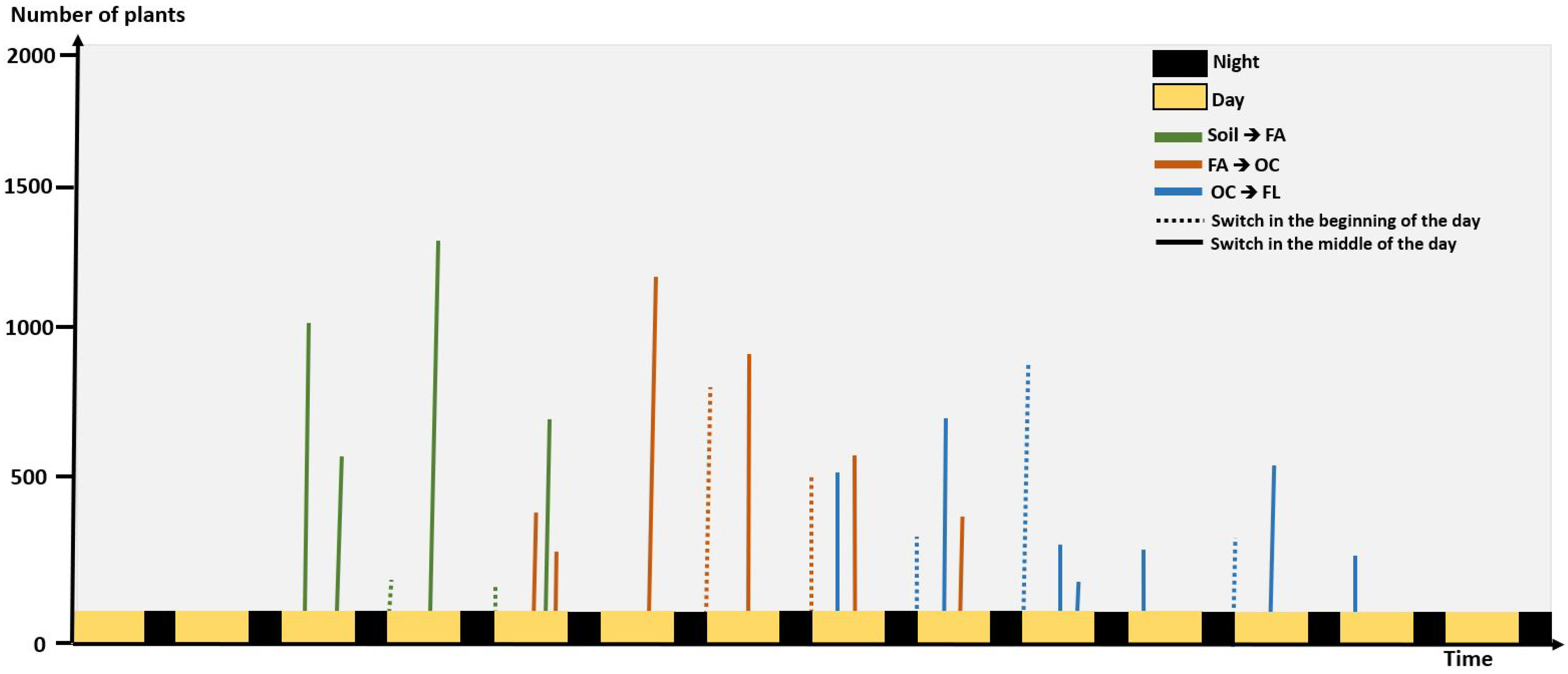
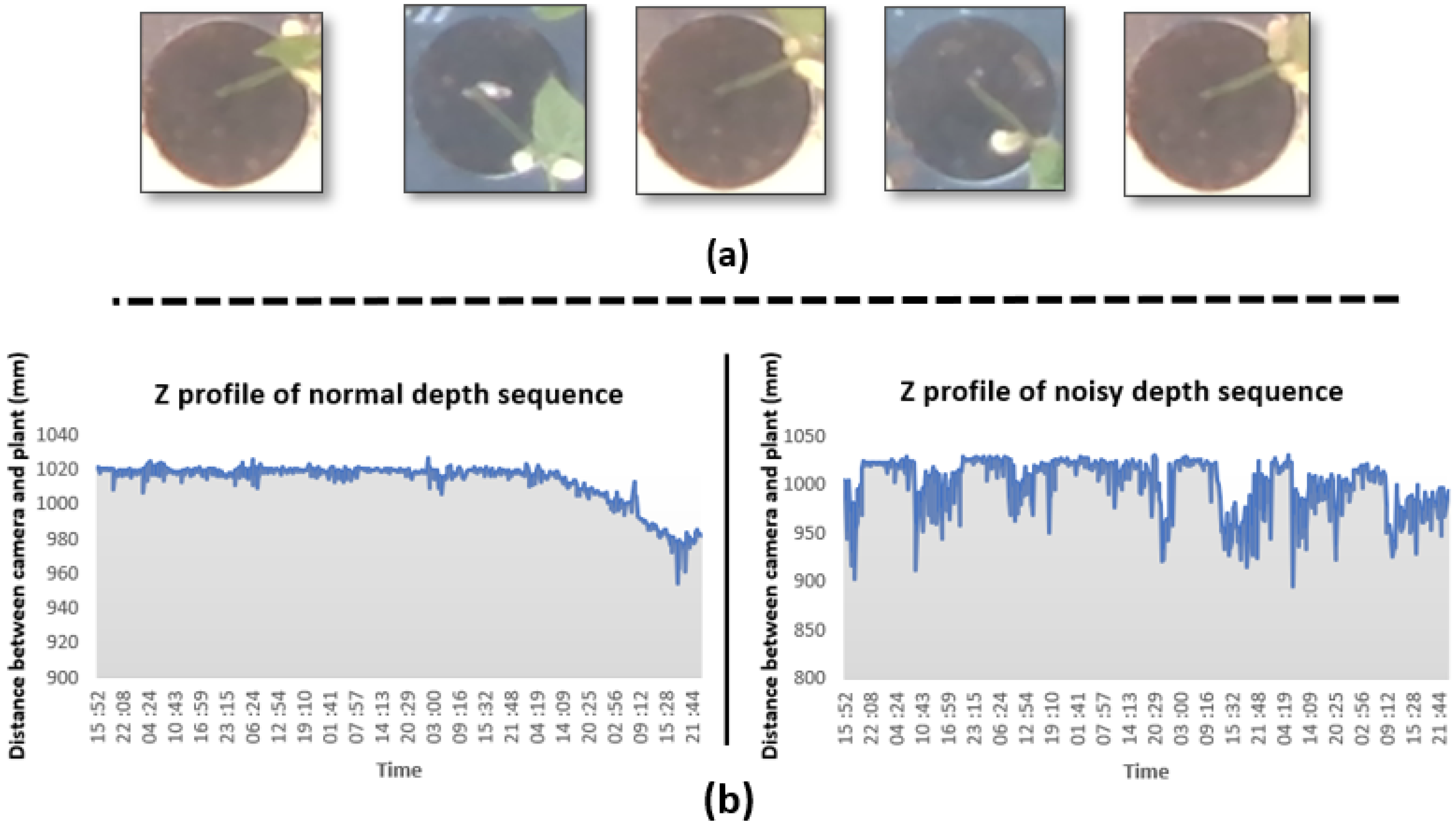
3.2. Detection of Event Changes at Night Using Depth Information
| Algorithm 1: Detection of night events using depth information. | ||
| Input: | ||
| = Sequences of depth images of a night during which a switch a growth stage is observed in RGB images. | ||
| = Sequences of depth images from the last day before the switch of growth stage A to B. | ||
| = Sequences of depth images from the first day after the switch of growth stage A to B. | ||
| Output: = Precise time of switch of growth stage. | ||
| 1 | ← mean(); | ▹ Spatial average of |
| 2 | ← mean(); | ▹ Spatial average of |
| 3 | ← mean(); | ▹ Spatial average of |
| 4 | ← mean( ; | ▹ Temporal average of |
| 5 | ← mean( ; | ▹ Temporal average of |
| 6 | ← − ; | ▹ Difference between and |
| 7 | ← − ; | ▹ Difference between and |
| 8 | ← sign ( − ); | ▹ Binary vector of the sign for the difference between and |
| 9 | ← find(bin==1111); | ▹ Get the index of first pattern (1111) in the binary vector. |
| 10 | ← + ; | ▹ Add the length of to the index of the first pattern (1111) to get the precise time |
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McCormac, A.C.; Keefe, P.D.; Draper, S.R. Automated vigour testing of field vegetables using image analysis. Seed Sci. Technol. 1990, 18, 103–112. [Google Scholar]
- Sako, Y.; McDonald, M.B.; Fujimura, K.; Evans, A.F.; Bennett, M.A. A system for automated seed vigour assessment. Seed Sci. Technol. 2001, 29, 625–636. [Google Scholar]
- Hoffmaster, A.L.; Fujimura, K.; McDonald, M.B.; Bennett, M.A. An automated system for vigor testing three-day-old soybean seedlings. Seed Sci. Technol. 2003, 31, 701–713. [Google Scholar] [CrossRef]
- Marcos-Filho, J.; Bennett, M.; McDonald, M.; Evans, A.; Grassbaugh, E. Assessment of melon seed vigour by an automated computer imaging system compared to traditional procedures. Seed Sci. Technol. 2006, 34, 485–497. [Google Scholar] [CrossRef]
- Marcos Filho, J.; Kikuti, A.L.P.; de Lima, L.B. Procedures for evaluation of soybean seed vigor, including an automated computer imaging system. Rev. Bras. Sementes 2009, 31, 102–112. [Google Scholar] [CrossRef]
- Joosen, R.V.L.; Kodde, J.; Willems, L.A.J.; Ligterink, W.; van der Plas, L.H.W.; Hilhorst, H.W. germinator: A software package for high-throughput scoring and curve fitting of Arabidopsis seed germination. Plant J. 2010, 62, 148–159. [Google Scholar] [CrossRef] [PubMed]
- Belin, É.; Rousseau, D.; Rojas-Varela, J.; Demilly, D.; Wagner, M.H.; Cathala, M.H.; Dürr, C. Thermography as non invasive functional imaging for monitoring seedling growth. Comput. Electron. Agric. 2011, 79, 236–240. [Google Scholar] [CrossRef]
- Benoit, L.; Belin, É.; Dürr, C.; Chapeau-Blondeau, F.; Demilly, D.; Ducournau, S.; Rousseau, D. Computer vision under inactinic light for hypocotyl–radicle separation with a generic gravitropism-based criterion. Comput. Electron. Agric. 2015, 111, 12–17. [Google Scholar] [CrossRef]
- Marcos Filho, J. Seed vigor testing: An overview of the past, present and future perspective. Sci. Agric. 2015, 72, 363–374. [Google Scholar] [CrossRef] [Green Version]
- Gnädinger, F.; Schmidhalter, U. Digital counts of maize plants by unmanned aerial vehicles (UAVs). Remote Sens. 2017, 9, 544. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi-Tehran, P.; Sabermanesh, K.; Virlet, N.; Hawkesford, M.J. Automated method to determine two critical growth stages of wheat: Heading and flowering. Front. Plant Sci. 2017, 8, 252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rasti, P.; Demilly, D.; Benoit, L.; Belin, E.; Ducournau, S.; Chapeau-Blondeau, F.; Rousseau, D. Low-cost vision machine for high-throughput automated monitoring of heterotrophic seedling growth on wet paper support. In Proceedings of the British Machine Vision Conference 2018, BMVC 2018, Newcastle, UK, 3–6 September 2018; p. 323. [Google Scholar]
- Chen, R.; Chu, T.; Landivar, J.A.; Yang, C.; Maeda, M.M. Monitoring cotton (Gossypium hirsutum L.) germination using ultrahigh-resolution UAS images. Precis. Agric. 2018, 19, 161–177. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, J.; Yang, C.; Zhou, G.; Ding, Y.; Shi, Y.; Zhang, D.; Xie, J.; Liao, Q. Rapeseed seedling stand counting and seeding performance evaluation at two early growth stages based on unmanned aerial vehicle imagery. Front. Plant Sci. 2018, 9, 1362. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, C.; Paterson, A.H.; Robertson, J.S. DeepSeedling: Deep convolutional network and Kalman filter for plant seedling detection and counting in the field. Plant Methods 2019, 15, 141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Samiei, S.; Rasti, P.; Vu, J.L.; Buitink, J.; Rousseau, D. Deep learning-based detection of seedling development. Plant Methods 2020, 16, 103. [Google Scholar] [CrossRef]
- Chéné, Y.; Rousseau, D.; Lucidarme, P.; Bertheloot, J.; Caffier, V.; Morel, P.; Belin, É.; Chapeau-Blondeau, F. On the use of depth camera for 3D phenotyping of entire plants. Comput. Electron. Agric. 2012, 82, 122–127. [Google Scholar] [CrossRef]
- Nock, C.; Taugourdeau, O.; Delagrange, S.; Messier, C. Assessing the potential of low-cost 3D cameras for the rapid measurement of plant woody structure. Sensors 2013, 13, 16216–16233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paulus, S.; Behmann, J.; Mahlein, A.K.; Plümer, L.; Kuhlmann, H. Low-cost 3D systems: Suitable tools for plant phenotyping. Sensors 2014, 14, 3001–3018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rousseau, D.; Chéné, Y.; Belin, E.; Semaan, G.; Trigui, G.; Boudehri, K.; Franconi, F.; Chapeau-Blondeau, F. Multiscale imaging of plants: Current approaches and challenges. Plant Methods 2015, 11, 6. [Google Scholar] [CrossRef] [Green Version]
- Rosell-Polo, J.R.; Gregorio, E.; Gené, J.; Llorens, J.; Torrent, X.; Arnó, J.; Escola, A. Kinect v2 sensor-based mobile terrestrial laser scanner for agricultural outdoor applications. IEEE/ASME Trans. Mechatron. 2017, 22, 2420–2427. [Google Scholar] [CrossRef] [Green Version]
- Vit, A.; Shani, G. Comparing rgb-d sensors for close range outdoor agricultural phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perez, R.M.; Cheein, F.A.; Rosell-Polo, J.R. Flexible system of multiple RGB-D sensors for measuring and classifying fruits in agri-food Industry. Comput. Electron. Agric. 2017, 139, 231–242. [Google Scholar] [CrossRef] [Green Version]
- Martinez-Guanter, J.; Ribeiro, Á.; Peteinatos, G.G.; Pérez-Ruiz, M.; Gerhards, R.; Bengochea-Guevara, J.M.; Machleb, J.; Andújar, D. Low-cost three-dimensional modeling of crop plants. Sensors 2019, 19, 2883. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, D.; Baret, F.; Welcker, C.; Bostrom, A.; Ball, J.; Cellini, F.; Lorence, A.; Chawade, A.; Khafif, M.; Noshita, K.; et al. What is cost-efficient phenotyping? Optimizing costs for different scenarios. Plant Sci. 2019, 282, 14–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Servi, M.; Mussi, E.; Profili, A.; Furferi, R.; Volpe, Y.; Governi, L.; Buonamici, F. Metrological Characterization and Comparison of D415, D455, L515 RealSense Devices in the Close Range. Sensors 2021, 21, 7770. [Google Scholar] [CrossRef] [PubMed]
- Baltrušaitis, T.; Ahuja, C.; Morency, L.P. Multimodal machine learning: A survey and taxonomy. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 423–443. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Atrey, P.K.; Hossain, M.A.; El Saddik, A.; Kankanhalli, M.S. Multimodal fusion for multimedia analysis: A survey. Multimed. Syst. 2010, 16, 345–379. [Google Scholar] [CrossRef]
- Ramachandram, D.; Taylor, G.W. Deep multimodal learning: A survey on recent advances and trends. IEEE Signal Process. Mag. 2017, 34, 96–108. [Google Scholar] [CrossRef]
- Valada, A.; Oliveira, G.L.; Brox, T.; Burgard, W. Deep multispectral semantic scene understanding of forested environments using multimodal fusion. In Proceedings of the International Symposium on Experimental Robotics, Nagasaki, Japan, 3–8 October 2016. [Google Scholar]
- Andreas, E.; Jost, T.S.; Luciano, S.; Martin, R.; Wolfram, B. Multimodal deep learning for robust RGB-D object recognition. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Jordi, S.R.; Kai-Lung, H.; Yuan-Sheng, H.; Tekoing, L.; Shintami, C.; Wen-Huang, C. A comparative study of data fusion for RGB-D based visual recognition. Pattern Recognit. Lett. 2016, 73, 1–6. [Google Scholar]
- Wang, A.; Lu, J.; Cai, J.; Cham, T.J.; Wang, G. Large-margin multimodal deep learning for RGB-D object recognition. IEEE Trans. Multimed. 2015, 17, 1887–1898. [Google Scholar] [CrossRef]
- Bezen, R.; Edan, Y.; Halachmi, I. Computer vision system for measuring individual cow feed intake using RGB-D camera and deep learning algorithms. Comput. Electron. Agric. 2020, 172, 105345. [Google Scholar] [CrossRef]
- Srivastava, N.; Salakhutdinov, R. Learning representations for multimodal data with deep belief nets. In Proceedings of the 29th International Conference Machine Learning (Workshop), Edinburgh, UK, 26 June–1 July 2012. [Google Scholar]
- Yu, C.; Shawn, S.; Jianbiao, H.; Degui, X.; Cui, T.; Ping, C.; Henning, M. Medical image retrieval: A multimodal approach. Cancer Inform. 2014, 13, 125. [Google Scholar]
- Lenz, I.; Lee, H.; Saxena, A. Deep learning for detecting robotic grasps. Int. J. Robot. Res. 2015, 34, 705–724. [Google Scholar] [CrossRef] [Green Version]
- Ashesh, J.; Avi, S.; Hema, S.K.; Shane, S.; Ashutosh, S. Recurrent neural networks for driver activity anticipation via sensory-fusion architecture. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Xinhang, S.; Shuqiang, J.; Luis, H.; Chengpeng, C. Learning effective RGB-D representations for scene recognition. IEEE Trans. Image Process. 2019, 28, 980–993. [Google Scholar]
- Cheng, Y.; Zhao, X.; Cai, R.; Li, Z.; Huang, K.; Rui, Y. Semi-supervised multimodal deep learning for RGB-D object recognition. In Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-16), New York, NY, USA, 9–15 July 2016. [Google Scholar]
- Li, S.; Cheng, Z.; Rustam, S. Weakly-supervised DCNN for RGB-D object recognition in real-world applications which lack large-scale annotated training data. arXiv 2017, arXiv:1703.06370. [Google Scholar]
- Graves, A.; Mohamed, A.r.; Hinton, G. Speech recognition with deep recurrent neural networks. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 6645–6649. [Google Scholar]
- Garbouge, H.; Rasti, P.; Rousseau, D. Deep learning-based detection of seedling development from indoor to outdoor. In Proceedings of the International Conference on Systems, Signals and Image Processing (IWSSIP), Bratislava, Slovakia, 2–4 June 2021; Volume 1, pp. 1–11. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Minervini, M.; Giuffrida, M.V.; Perata, P.; Tsaftaris, S.A. Phenotiki: An open software and hardware platform for affordable and easy image-based phenotyping of rosette-shaped plants. Plant J. 2017, 90, 204–216. [Google Scholar] [CrossRef] [Green Version]
- Intel RealSense Documentation—Intel RealSense Depth Tracking Cameras. Available online: https://dev.intelrealsense.com/docs/docs-get-started (accessed on 7 December 2019).
- Granados, M.; In-Kim, K.; Tompkin, J.; Kautz, J.; Theobalt, C. Background Inpainting for Videos with Dynamic Objects and a Free-moving Camera. In Proceedings of the European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012. [Google Scholar]
- Couprie, C.; Farabet, C.; Najman, L.; LeCun, Y. Indoor semantic segmentation using depth information. arXiv 2013, arXiv:1301.3572. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Yin, W.; Kann, K.; Yu, M.; Schütze, H. Comparative study of CNN and RNN for natural language processing. arXiv 2017, arXiv:1702.01923. [Google Scholar]
- Zhou, K.; Wang, W.; Hu, T.; Deng, K. Time Series Forecasting and Classification Models Based on Recurrent with Attention Mechanism and Generative Adversarial Networks. Sensors 2020, 20, 7211. [Google Scholar] [CrossRef]
- Yuan, Y.; Lin, L. Self-Supervised Pre-Training of Transformers for Satellite Image Time Series Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 474–487. [Google Scholar] [CrossRef]
- Garnot, V.S.F.; Landrieu, L.; Giordano, S.; Chehata, N. Satellite image time series classification with pixel-set encoders and temporal self-attention. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 12325–12334. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Sampaio, G.S.; Silva, L.A.d.; Marengoni, M. 3D Reconstruction of Non-Rigid Plants and Sensor Data Fusion for Agriculture Phenotyping. Sensors 2021, 21, 4115. [Google Scholar] [CrossRef] [PubMed]
- Jin, J.; Dundar, A.; Bates, J.; Farabet, C.; Culurciello, E. Tracking with deep neural networks. In Proceedings of the 2013 47th Annual Conference on Information Sciences and Systems (CISS), Baltimore, MD, USA, 20–22 March 2013; pp. 1–5. [Google Scholar]
- Srivastava, D.; Shamim, M.; Kumar, M.; Mishra, A.; Maurya, R.; Sharma, D.; Pandey, P.; Singh, K. Role of circadian rhythm in plant system: An update from development to stress response. Environ. Exp. Bot. 2019, 162, 256–271. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | No. of Temporal Sequences | Totale No. of Images during Days | Totale No. of Images during Nights | Totale No. of All Images | |
|---|---|---|---|---|---|
| Training dataset | Flavert | 10 | 4240 | 1920 | 36,960 |
| Red Hawk | 10 | 4240 | 1920 | ||
| Linex | 10 | 4240 | 1920 | ||
| Caprice | 10 | 4240 | 1920 | ||
| Deezer | 10 | 4240 | 1920 | ||
| Vanilla | 10 | 4240 | 1920 | ||
| Validation dataset | Flavert | 1 | 424 | 192 | 3696 |
| Red Hawk | 1 | 424 | 192 | ||
| Linex | 1 | 424 | 192 | ||
| Caprice | 1 | 424 | 192 | ||
| Deezer | 1 | 424 | 192 | ||
| Vanilla | 1 | 424 | 192 | ||
| Testing dataset | Flavert | 1 | 424 | 192 | 3696 |
| Red Hawk | 1 | 424 | 192 | ||
| Linex | 1 | 424 | 192 | ||
| Caprice | 1 | 424 | 192 | ||
| Deezer | 1 | 424 | 192 | ||
| Vanilla | 1 | 424 | 192 |
| Training | Validation | Test | |
|---|---|---|---|
| RGB | |||
| Image fusion RGB-Depth | |||
| Features fusion RGB-Depth |
| Training | Validation | Test | |
|---|---|---|---|
| RGB | |||
| Image fusion RGB-Depth | |||
| Features fusion RGB-Depth |
| Training | Validation | Test | |
|---|---|---|---|
| RGB | |||
| Image fusion RGB-Depth | |||
| Features fusion RGB-Depth |
| Model | Training Time | |
|---|---|---|
| RGB | CNN | 1 h 00 min |
| Transformer | 1 h 30 min | |
| TD-CNN-GRU | 3 h 00 min | |
| Image fusion RGB-Depth | CNN | 1 h 15 min |
| Transformer | 1 h 35 min | |
| TD-CNN-GRU | 3 h 30 min | |
| Features fusion RGB-Depth | CNN | 1 h 20 min |
| Transformer | 1 h 30 min | |
| TD-CNN-GRU | 3 h 20 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garbouge, H.; Rasti, P.; Rousseau, D. Enhancing the Tracking of Seedling Growth Using RGB-Depth Fusion and Deep Learning. Sensors 2021, 21, 8425. https://doi.org/10.3390/s21248425
Garbouge H, Rasti P, Rousseau D. Enhancing the Tracking of Seedling Growth Using RGB-Depth Fusion and Deep Learning. Sensors. 2021; 21(24):8425. https://doi.org/10.3390/s21248425
Chicago/Turabian StyleGarbouge, Hadhami, Pejman Rasti, and David Rousseau. 2021. "Enhancing the Tracking of Seedling Growth Using RGB-Depth Fusion and Deep Learning" Sensors 21, no. 24: 8425. https://doi.org/10.3390/s21248425
APA StyleGarbouge, H., Rasti, P., & Rousseau, D. (2021). Enhancing the Tracking of Seedling Growth Using RGB-Depth Fusion and Deep Learning. Sensors, 21(24), 8425. https://doi.org/10.3390/s21248425