
A 5G-Enabled Smart Waste Management System for University Campus †

 , ,
, ,
Abstract
:1. Introduction
2. Related Work
3. Building the Smart Bin
3.1. Requirement Analysis
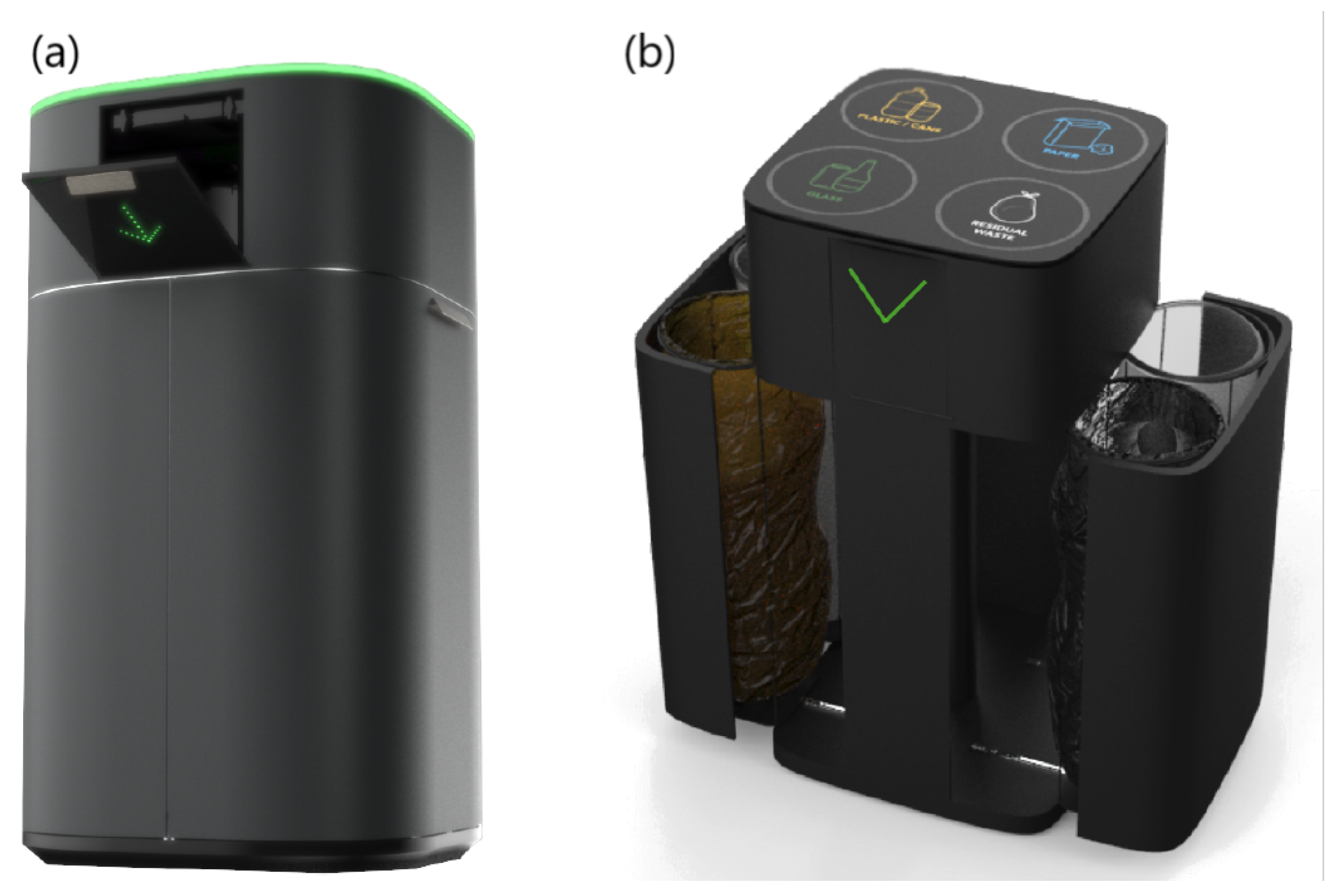
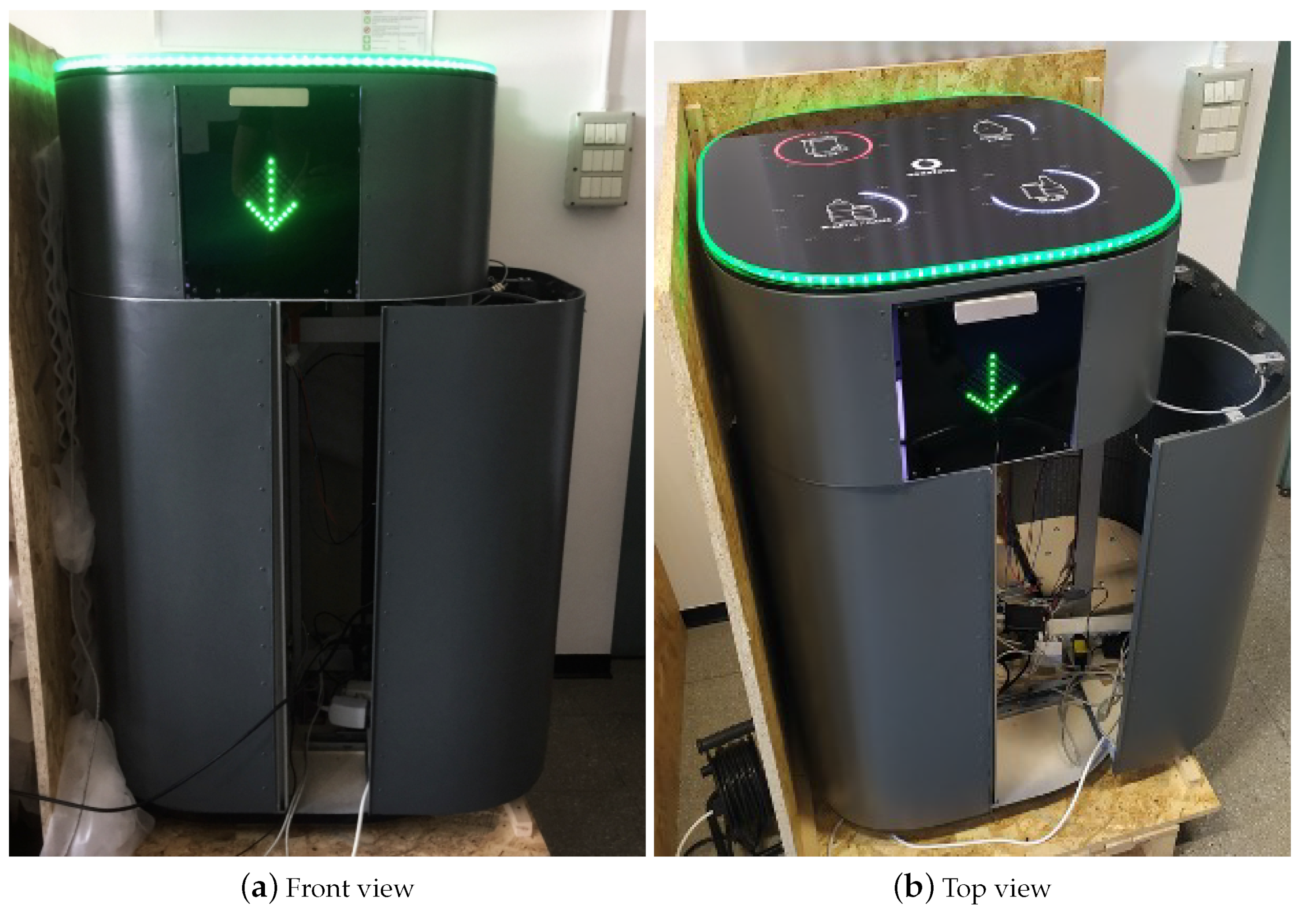
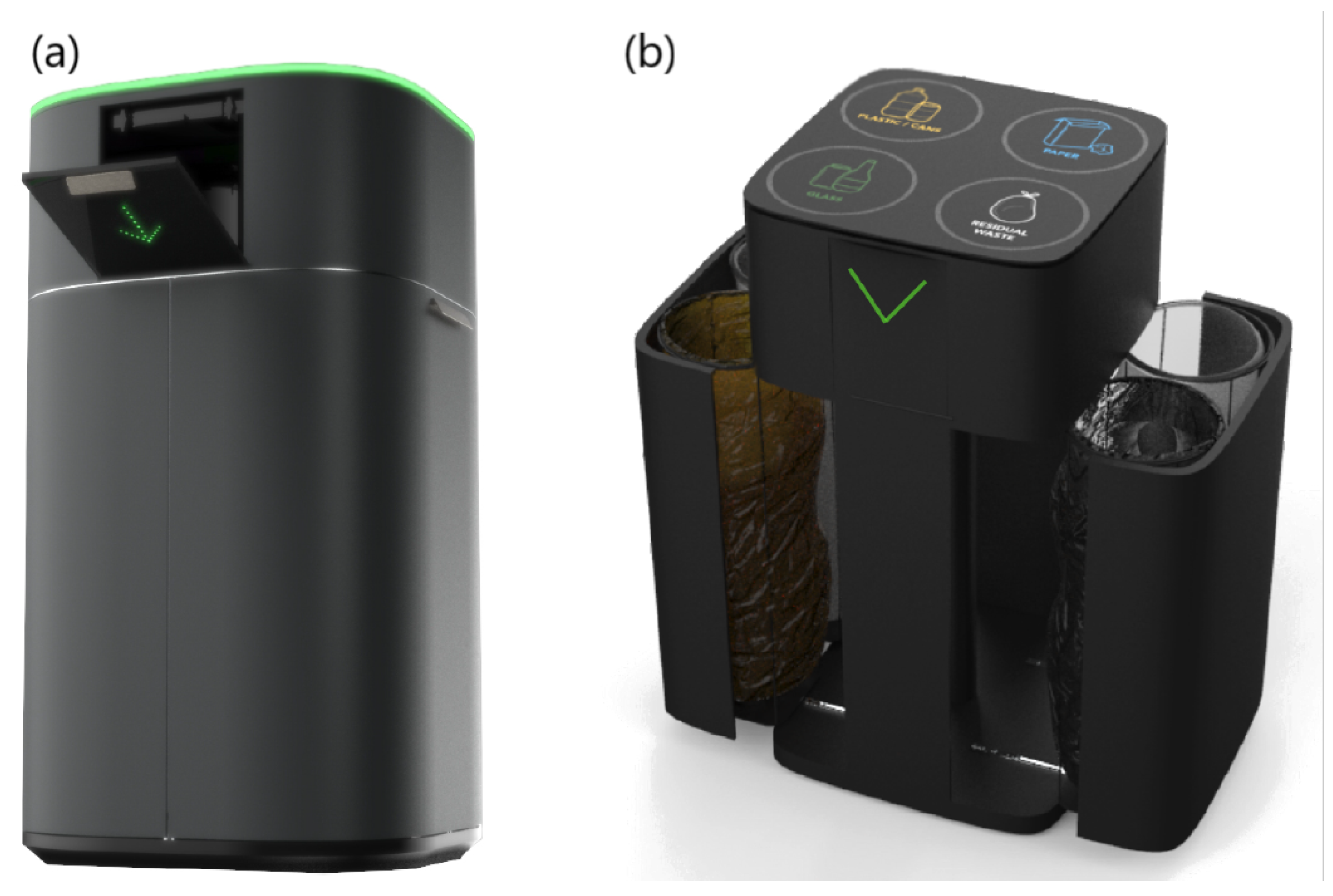
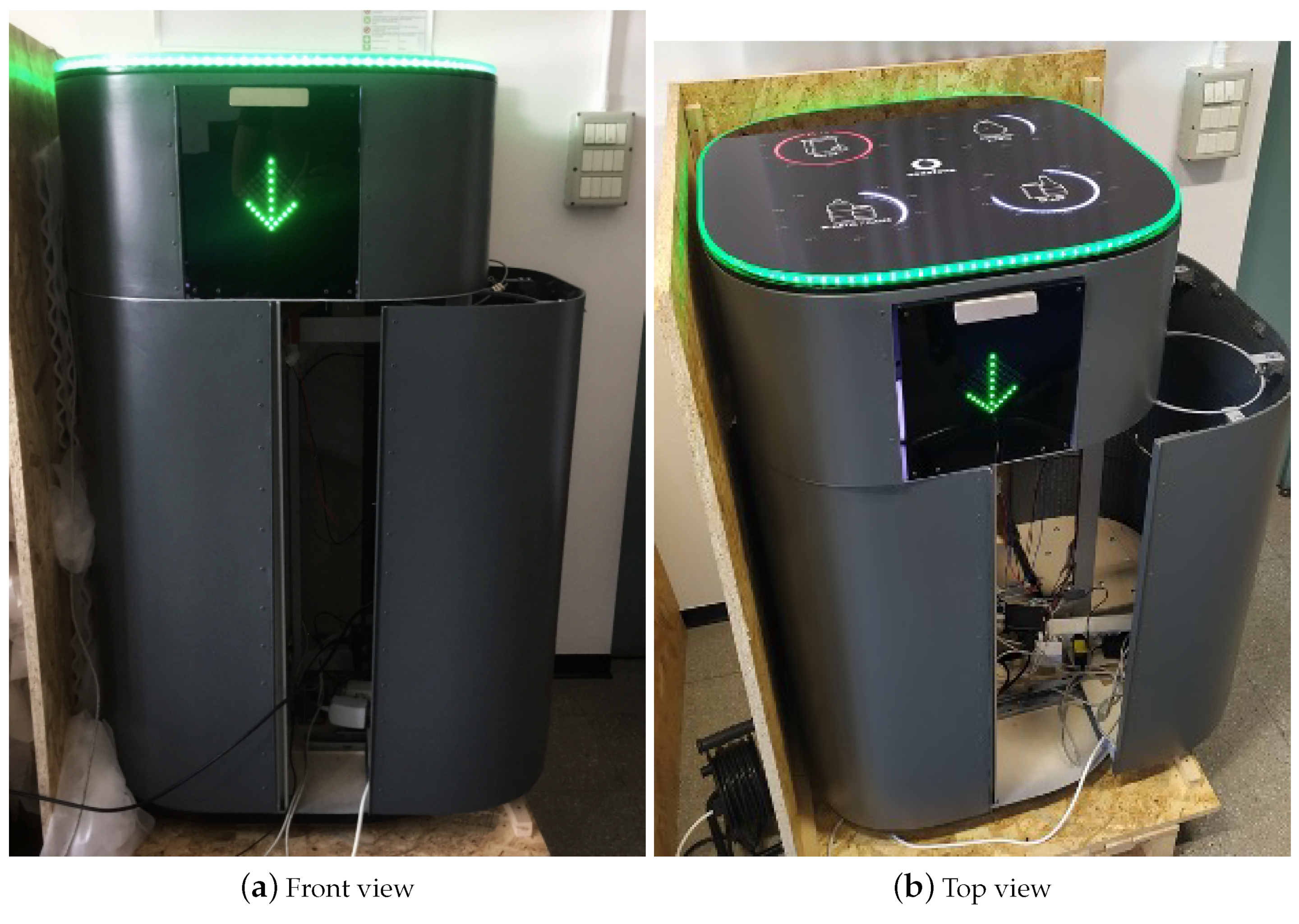
3.2. Prototype Design
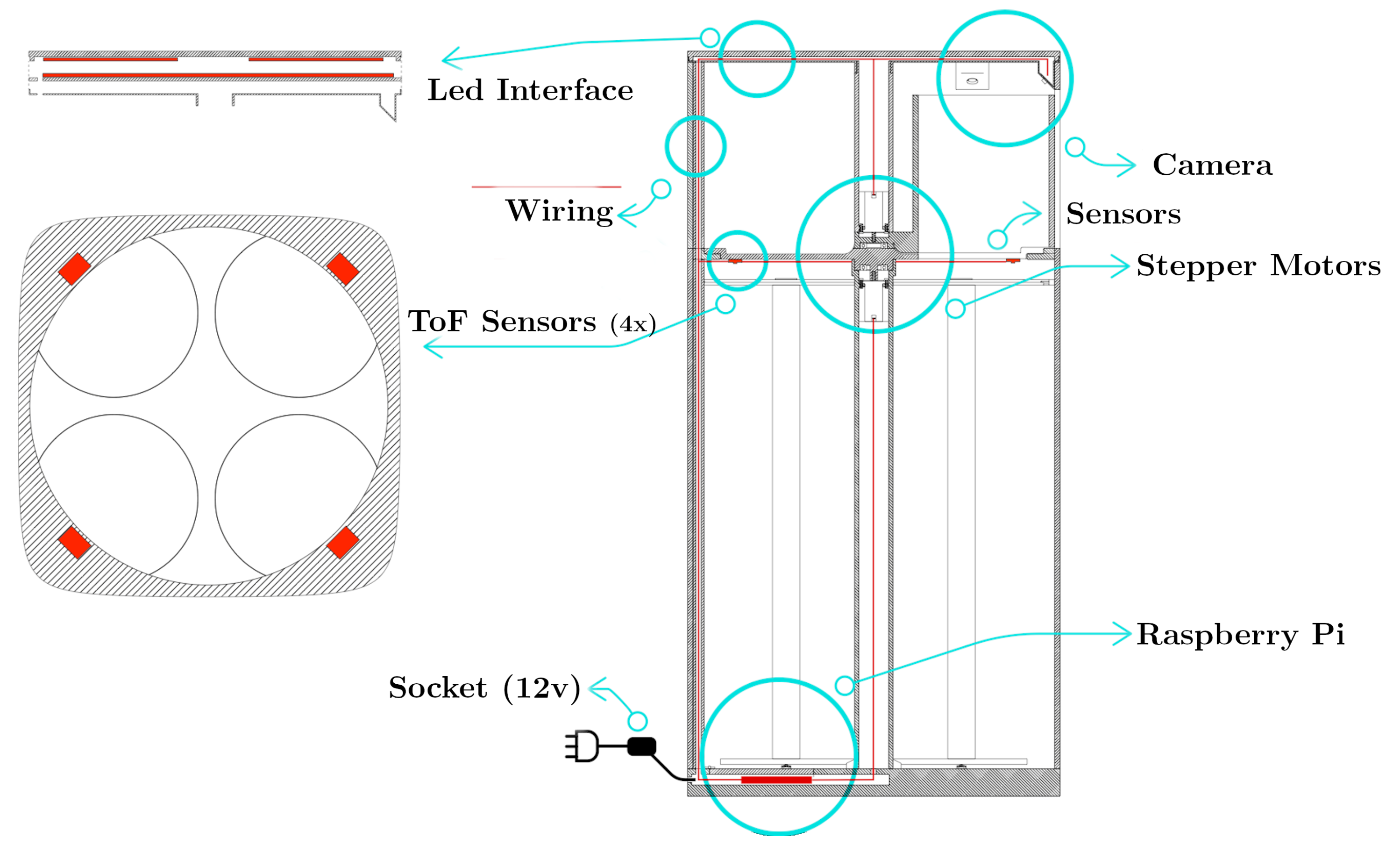
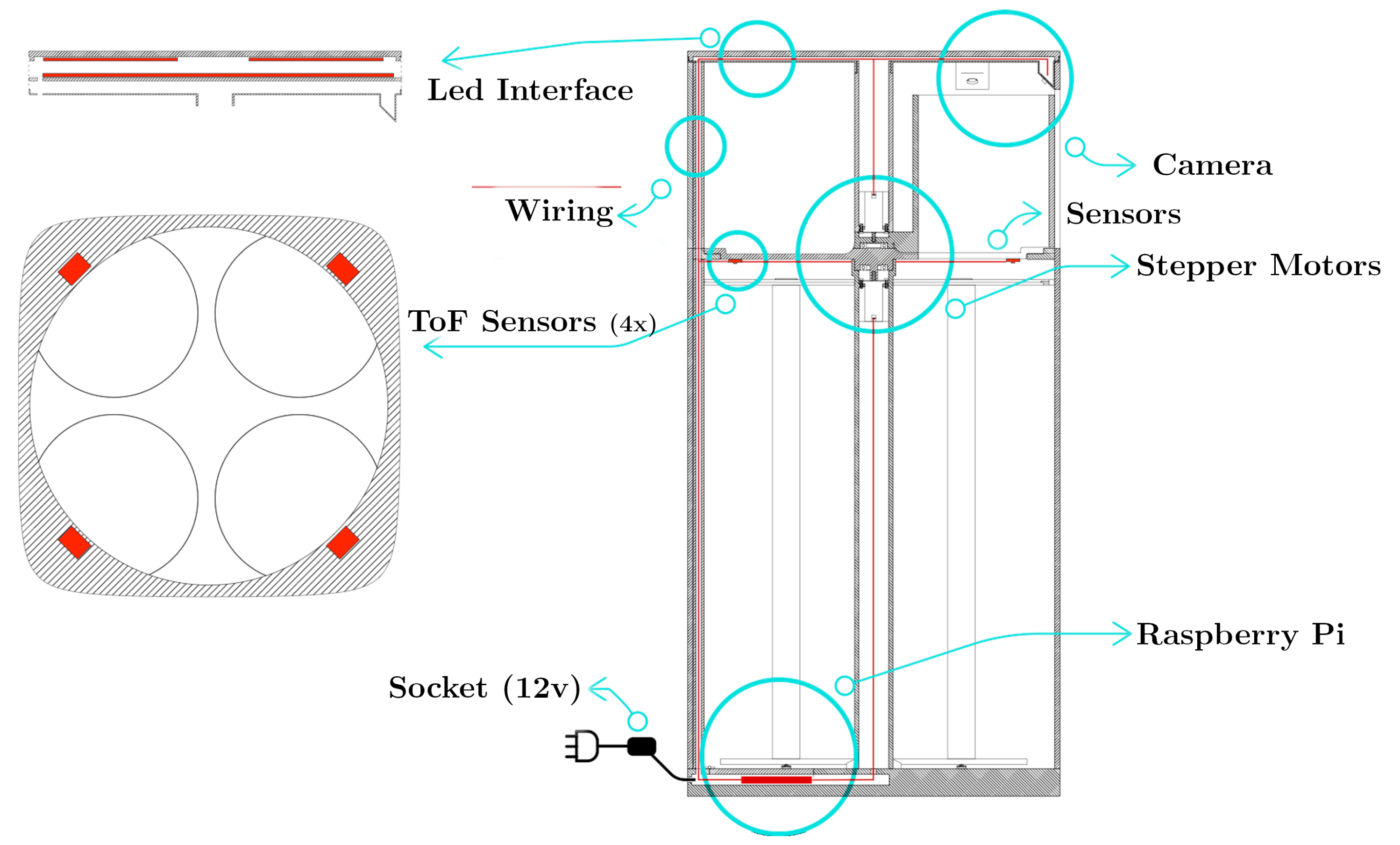
3.3. Sensors and Actuators
3.3.1. Waste Sensing Module
- Inductive Sensor: an LJ12A3-4-Z/BX sensor is attached to the bottom of the shelf in the WDU, used for non-contact detection of metallic objects. The detection range limit of this sensor is about 5mm: therefore, it is placed in the center of the WDU, which is curved to facilitate objects to slide towards the sensor.
- Capacitive Proximity Sensor: such type of sensors are generally used for non-contact detection of both metallic and nonmetallic objects. Here, we used an LJC18A3-H-z/BX sensor placed close to the inductive sensor. The detection range of the sensor is about 10 mm.
- Photoelectric Sensors: three couples of photoelectric emitter/receiver are attached at the two opposite sides of the WDU, in through-beam configuration. The emitters are standard LEDs, while we used BPW21 photodiodes as receivers. Such sensors may be used to detect transparent materials such as plastic or glass.
- Camera: on top of the WDU, a Logitech C920 wide-angle camera is placed at 45 cm from the surface, with an inclination of 30 degrees. The camera is configured to acquire images at a resolution of 320 × 240 pixels.
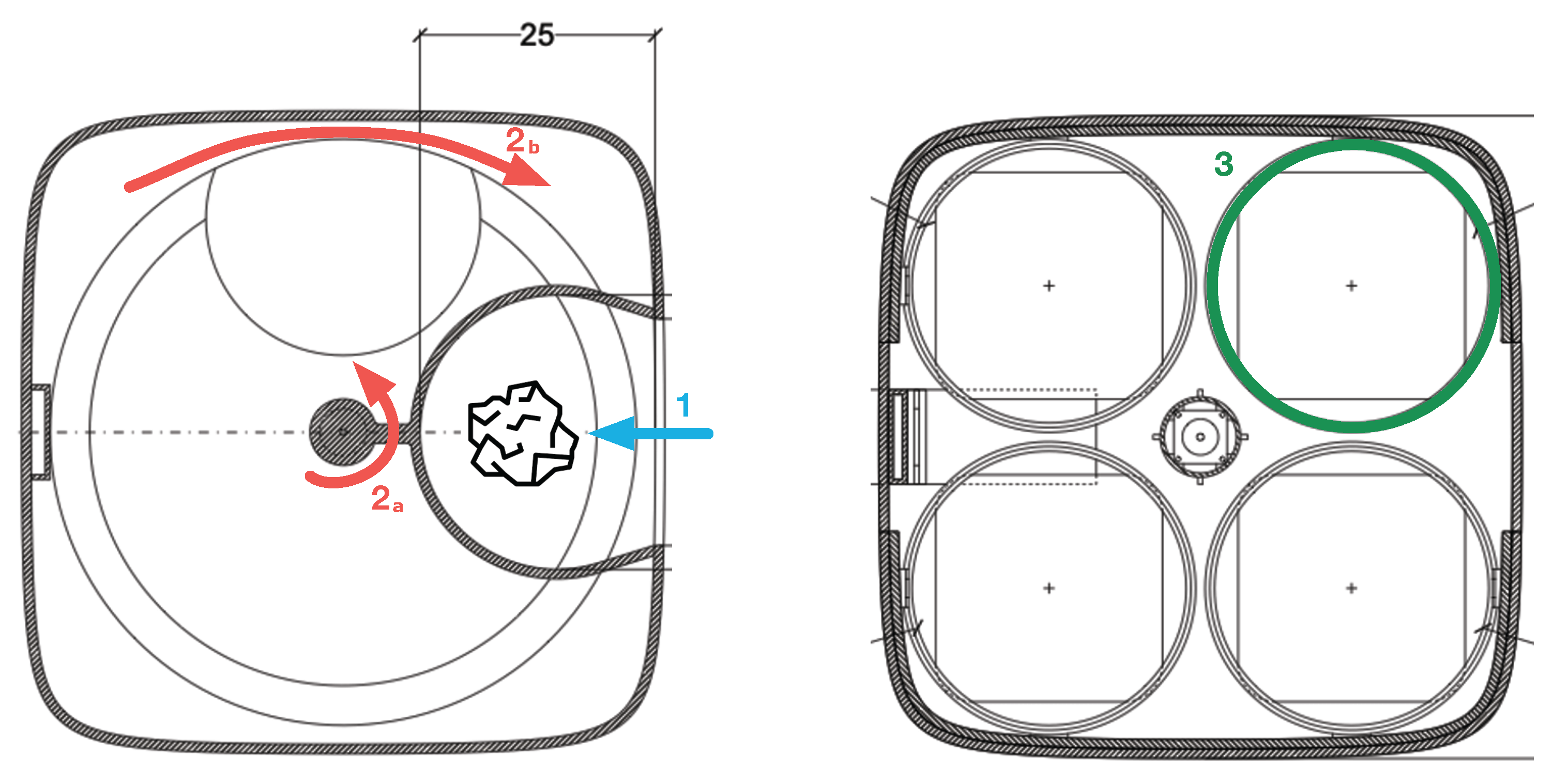
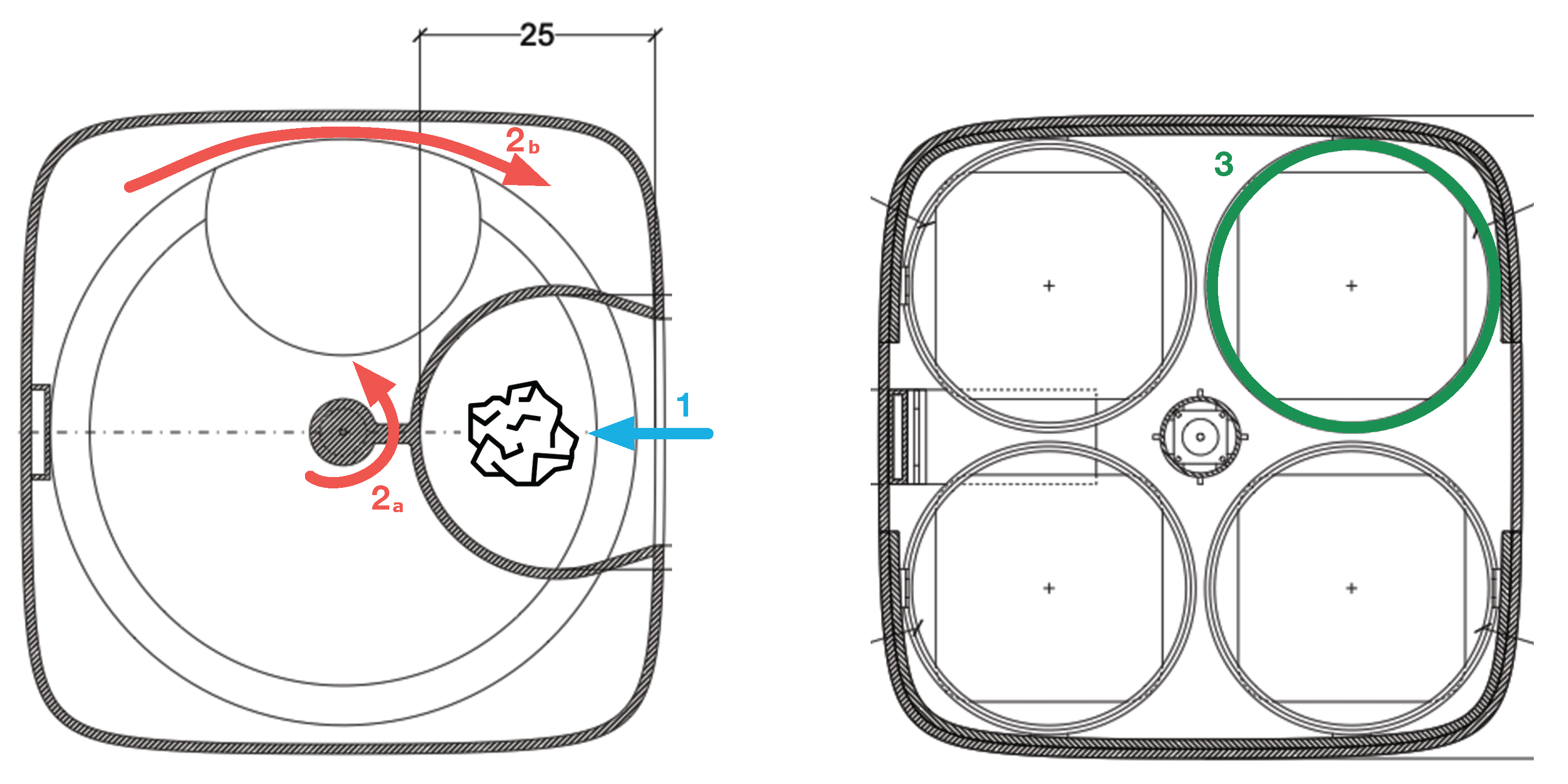
3.3.2. Automatic Waste Segregation
3.3.3. Fill Levels Engine
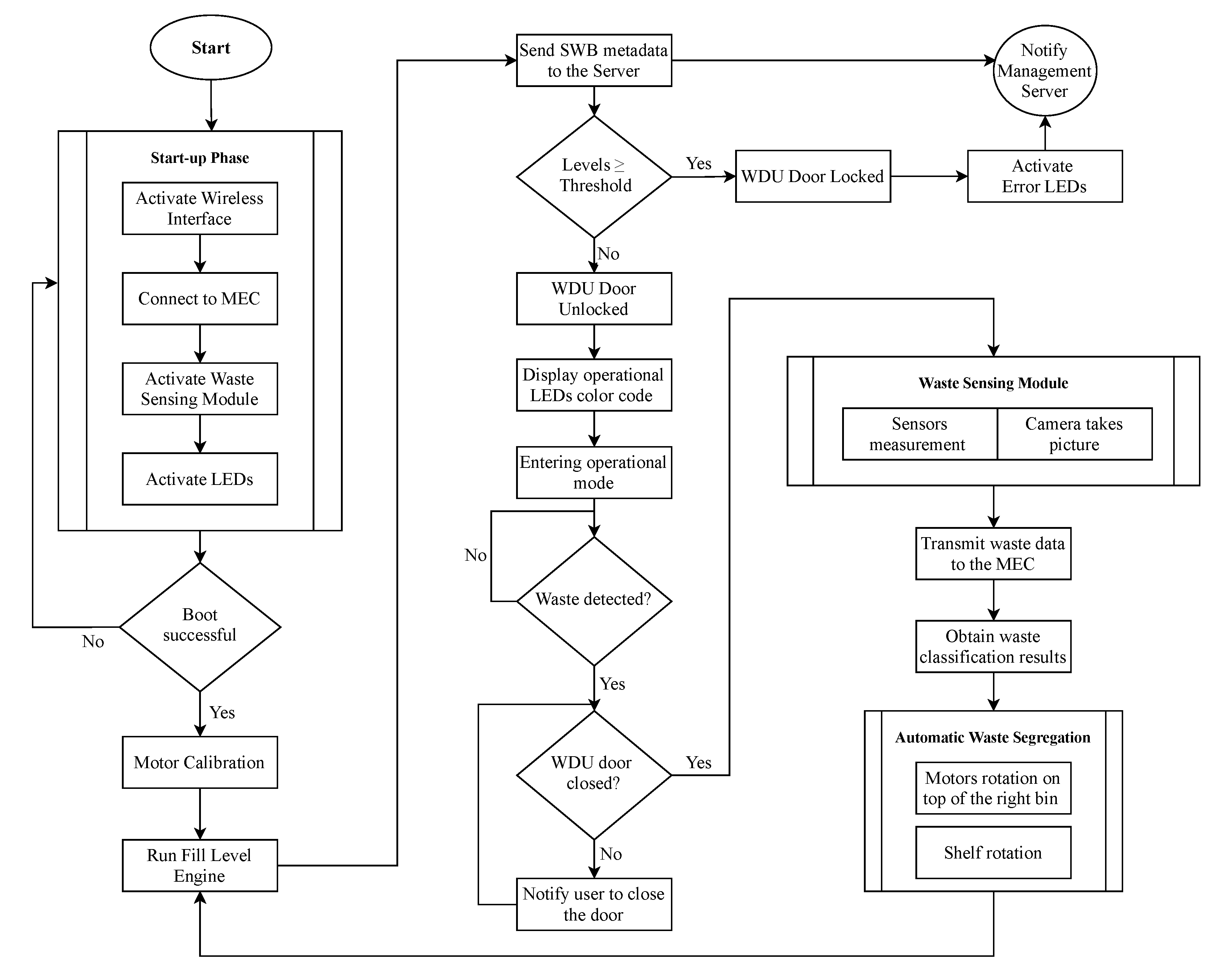
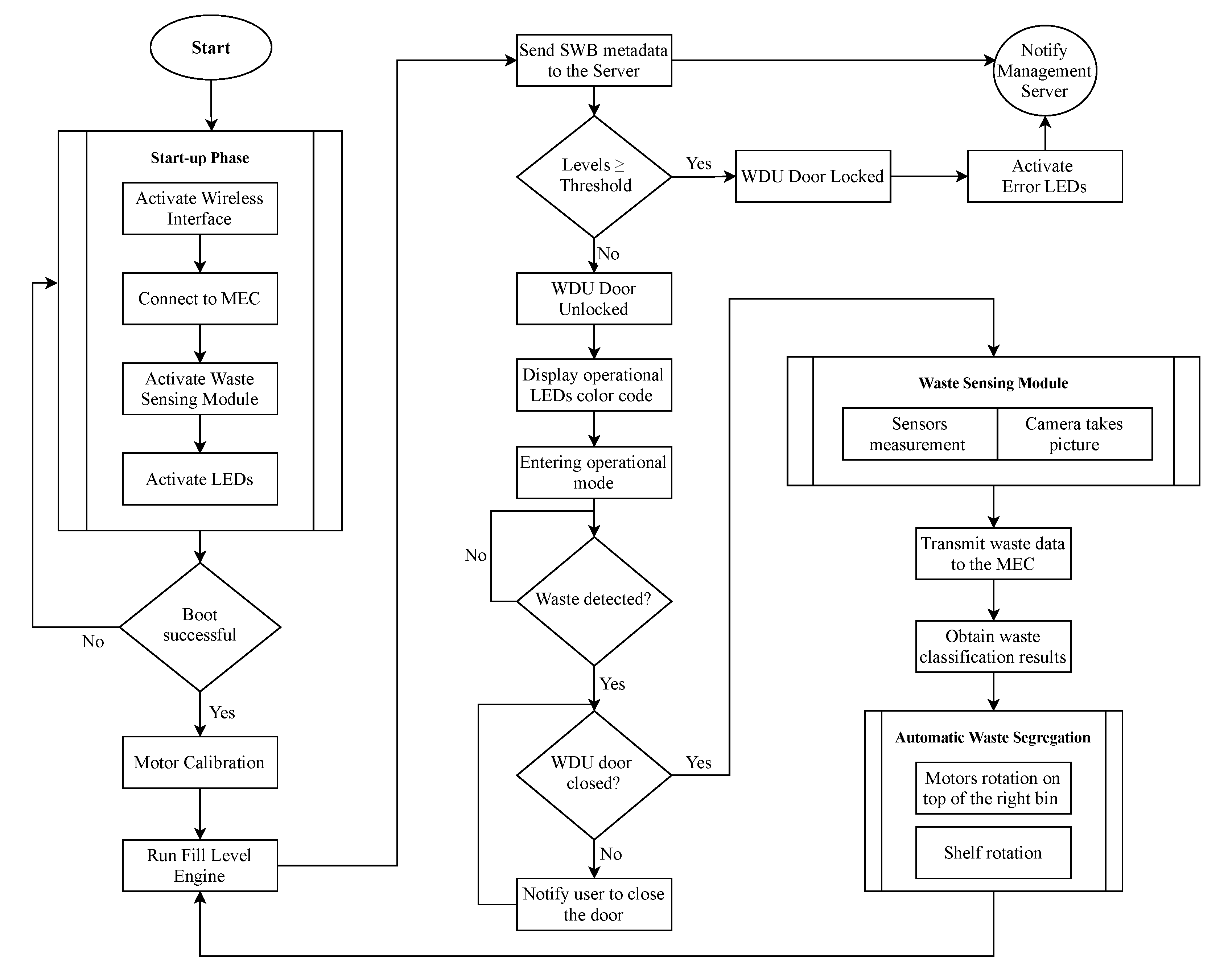
3.4. Standard Operating Procedure
- 1.
- Start-up routine: during this phase, the firmware executes a series of checks for all the sensors and actuators, as well as for the wireless connectivity with an external server. If all the checks are passed, the SWB can be started; otherwise, the flap door is locked and all LEDs are turned to red color.
- 2.
- Motors synchronization and calibration: after the start-up, the motors that control the automatic waste segregation need to align with the waste disposal unit to ensure correct disposal of trash. Such regulation allows the motors to set their starting position and subsequently compute the positions (in terms of degrees of rotation) of the four trash bags. For this purpose, the motors perform one complete 360 degrees start-up spin: we use a magnet and a Hall effect sensor to mark the starting position of both the shelf and the semicircular structure, thus calibrating the system.
- 3.
- Fill Levels Engine: after the controlling operations, the SWB verify that it has enough room to store new pieces of trash, using the Fill Levels Engine. The current level of each bag is estimated and transmitted via MQTT to an external server. The topic used for such signalling is smartbin/swb_id/fle/material where swb_id and material are the strings controlling the SWB identifier and the waste material corresponding to the sensed bag. If the levels exceed a specified threshold (75% in our case), the waste management administrator is promptly notified, in order to empty the bin before it can saturate the bag size. Moreover, when one or more bags fill levels reach 100% of the capacity, the bin activation is interrupted, the door is locked, and all LEDs are turned red, waiting for an operator to take action.
- 4.
- Waste insertion: when the SWB is active, a user willing to throw a piece of trash can open the lid of the waste disposal unit, insert an object on the shelf as in Figure 5(1) and, finally, close the lid to activate the classification process.
- 5.
- WSM activation: upon the closure of the WDU, the Smart Waste Bin, thanks to the Time-of-Flight sensors, detects that an object is ready to be analysed. At this point, in order to avoid any interference from outside, the SWB securely closes the lid and activates the waste sensing module, gathering measurements from the sensor as well as taking an image with the installed camera.
- 6.
- Waste Classification and Segregation: the sensed data is passed to the waste classification algorithm (Section 4), which returns, as a result, the estimated type of the piece of trash. Finally, the motors are activated and the object is moved in its correspondent bag.
- 7.
- Release: after the object is disposed correctly, the motors come back to the starting position, the fill levels engine is again activated, and the SWB is ready for another operation.
4. Waste Classification Algorithm
4.1. Dataset
4.2. Waste Classification
4.2.1. Classification from Scalar Data
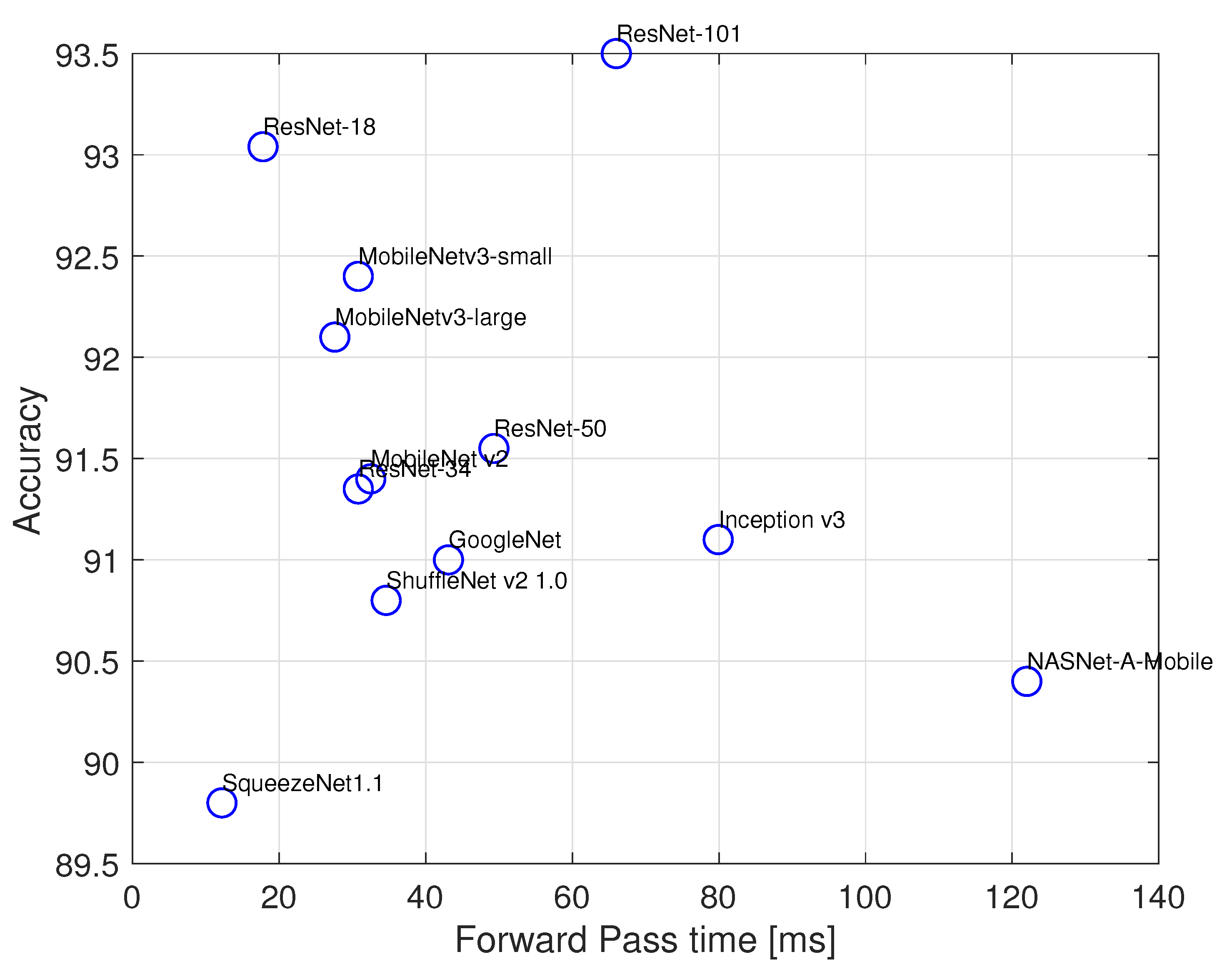
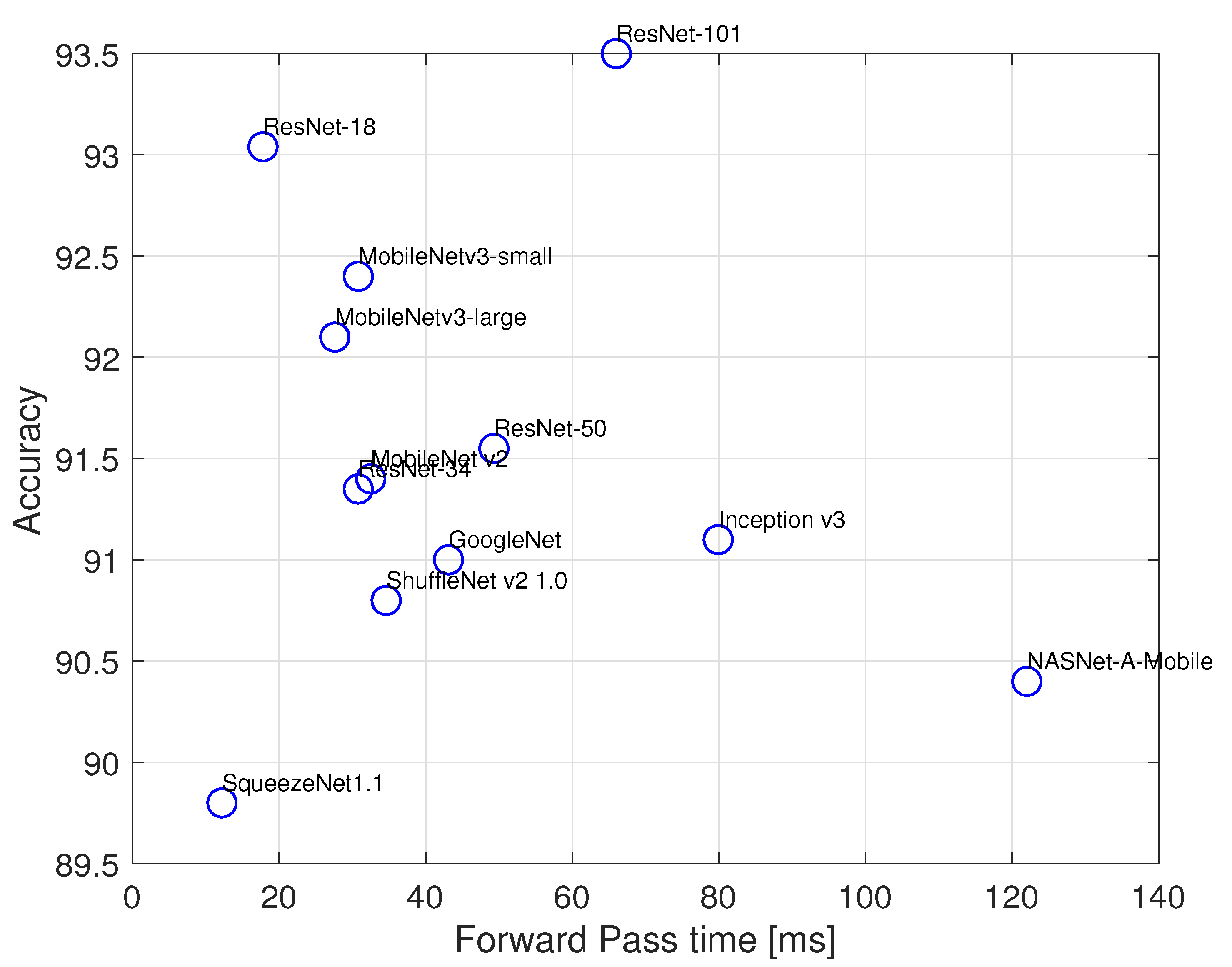
4.2.2. Classification from Images
4.2.3. Hybrid Classification
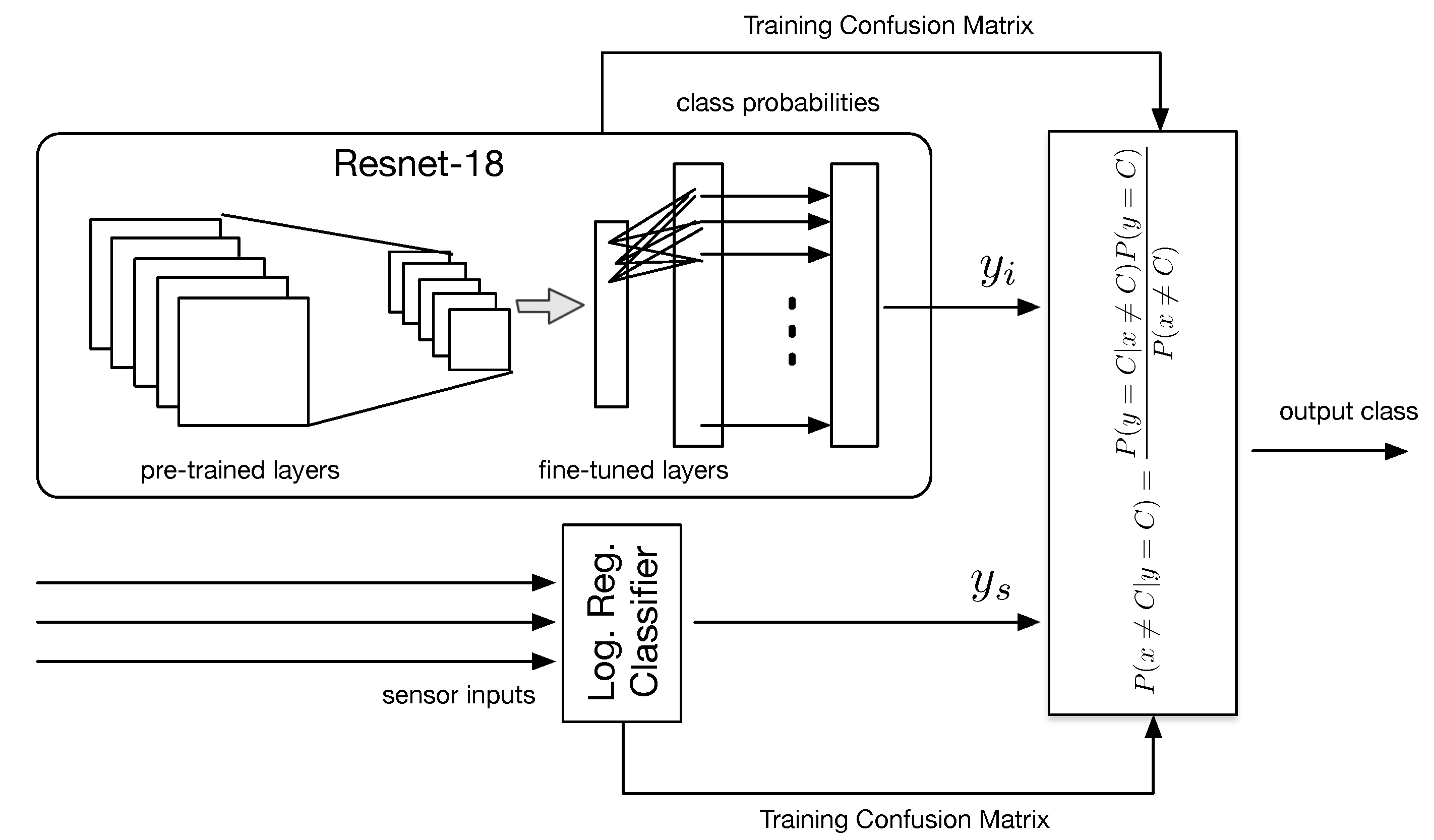
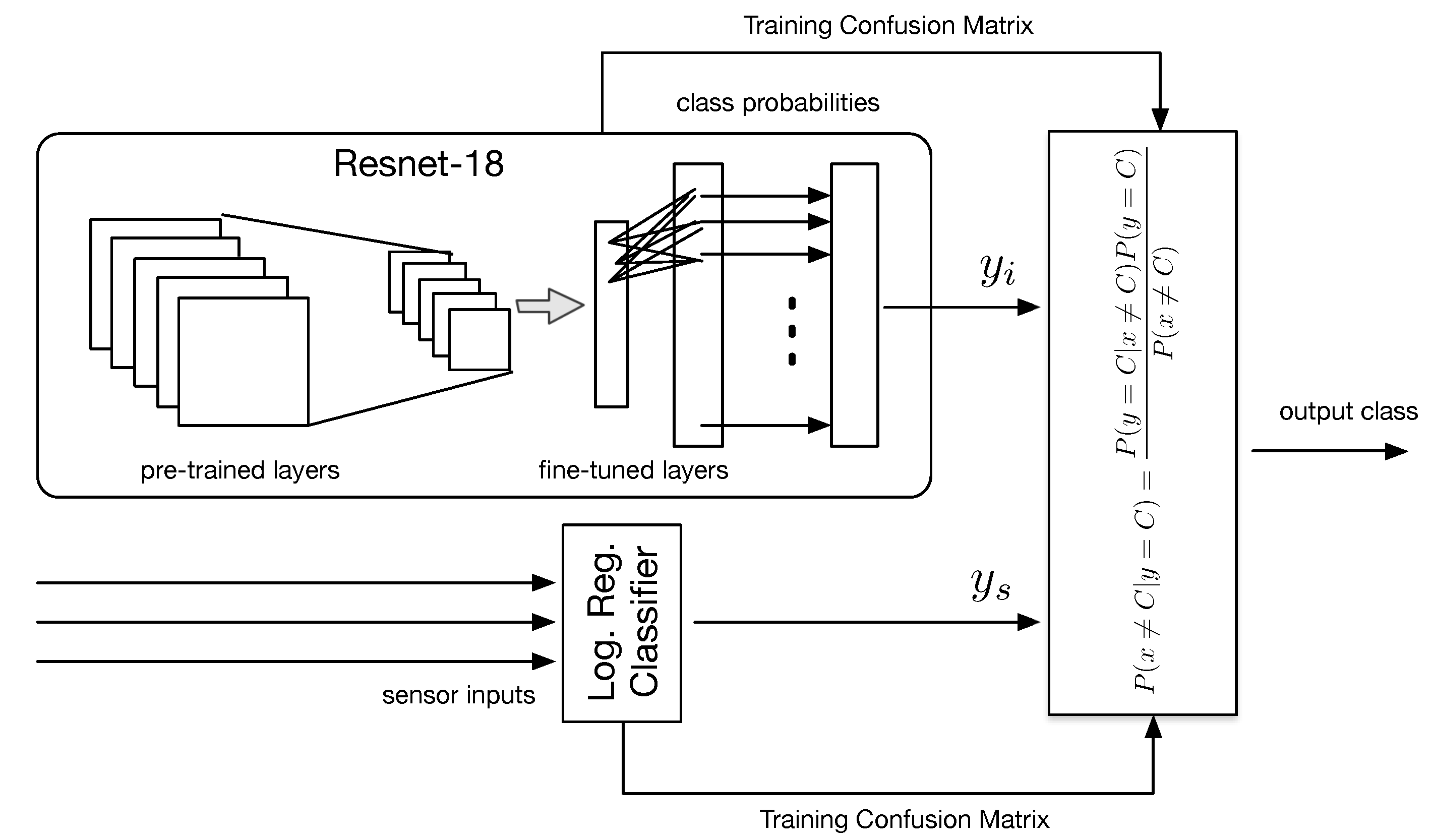
- 1.
- Integration at prediction time: a first approach consists of running the two classifiers in parallel and then taking a decision considering the lowest (training) classification error (Figure 10). Let y be the output of the two classifiers, taking qualitative value C = [glass, paper, plastic, metal, unsorted], i.e., the output class. For each classifier, we compute the a posteriori misclassification error probability ), being x the true class. To do this, we use the Bayes’ theorem:where , and are the likelihood of misclassification for class C, the prior output and the prior class probabilities, respectively. We estimated such quantities from the (training) confusion matrix of each classifier. In case the two classifiers agree on the output class, the method obviously returns the same class C; in case the two classifiers disagree, the class C having the lowest misclassification error is selected.As an example, let = plastic and be the output of the sensor-based and image-based classifiers, respectively. Assuming the values contained in Table 3 and Table 4 as the learnt probabilities during training we have:whileThe system will therefore select as final class, since its associated error is lower.
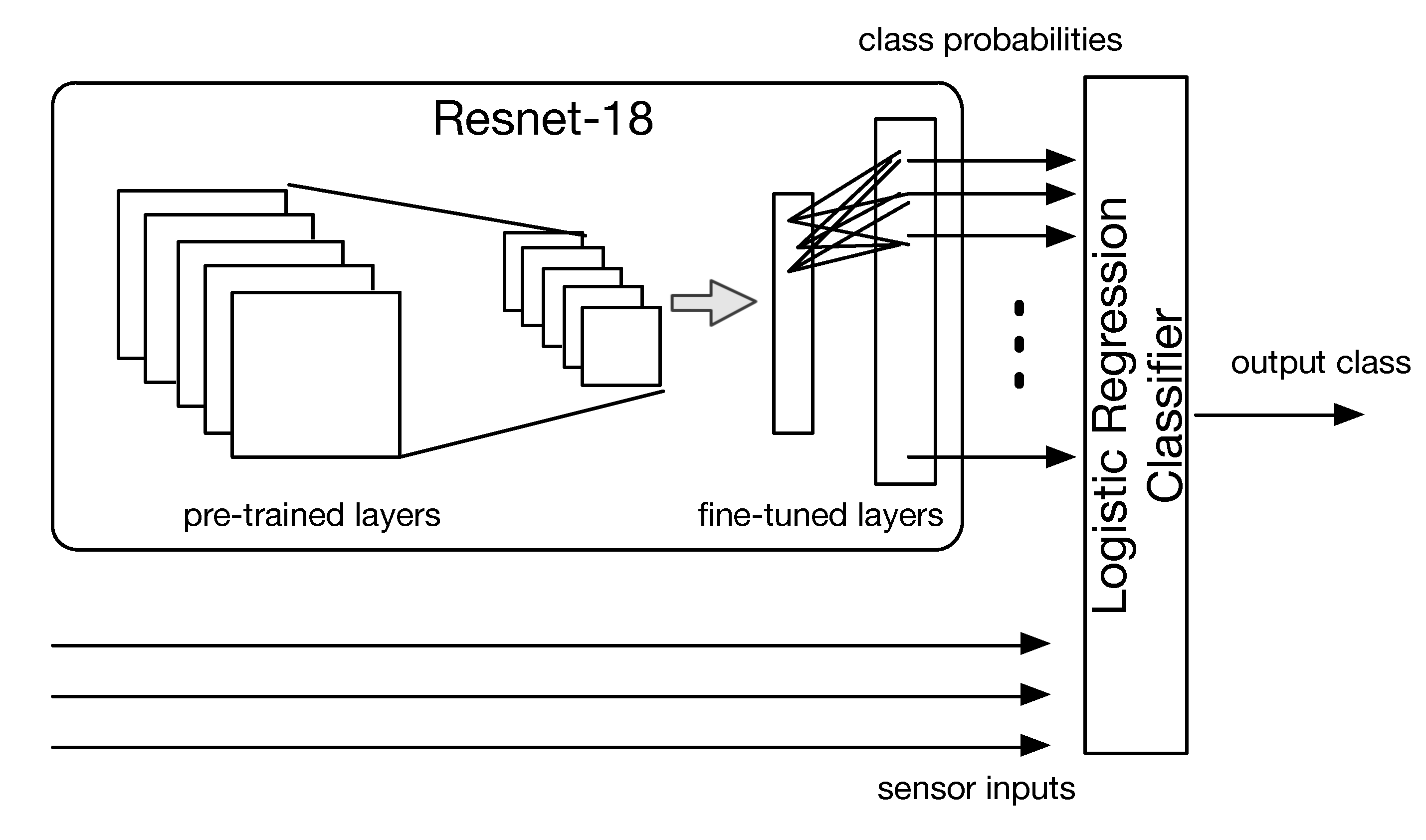
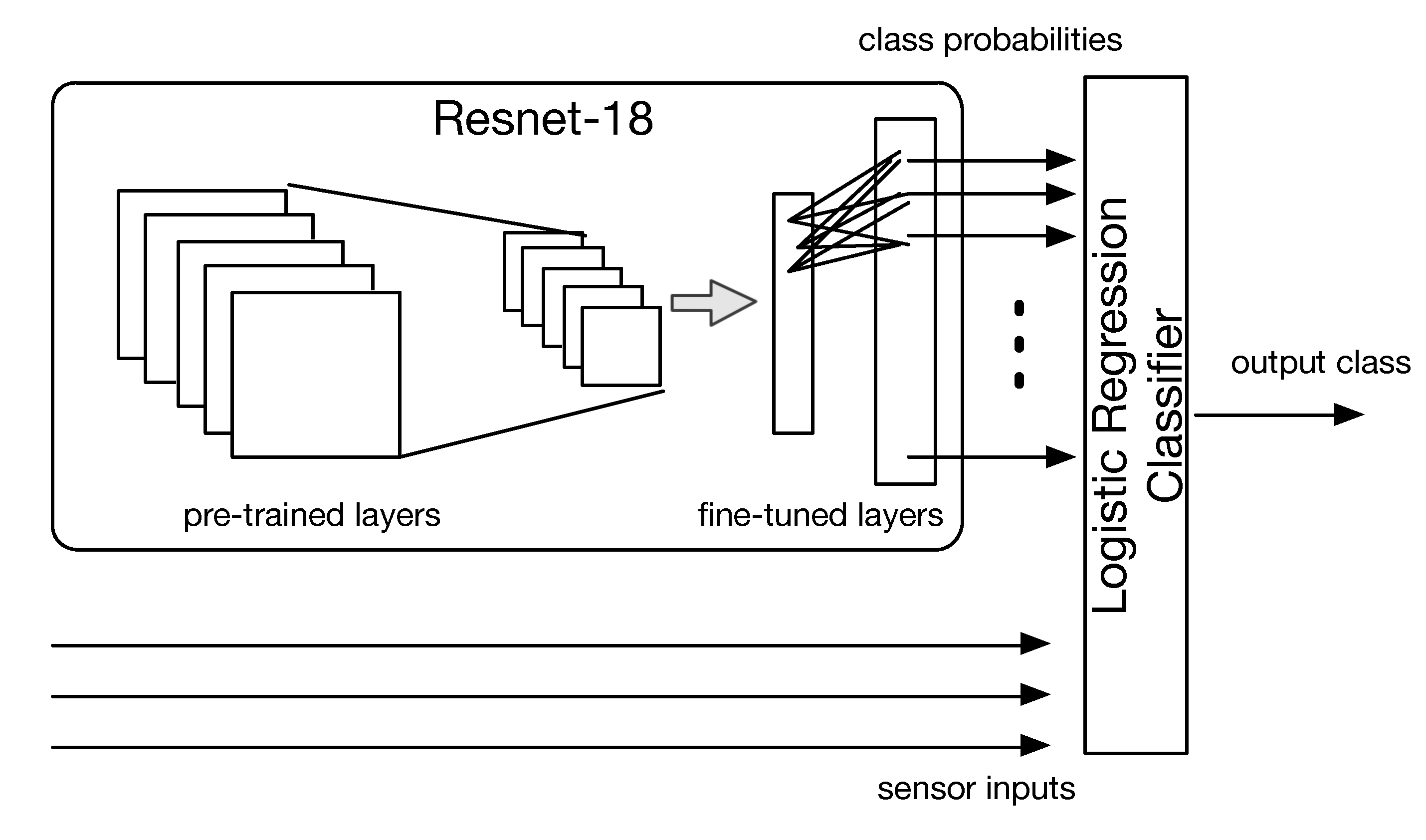
- 2.
- Integration at learning time: A second approach is to train a new classifier, where input features come from all available sensors. To do this, we note that the last layer of the fine-tuned CNN consists of 40 nodes, where each node outputs a value between 0 and 1 that represents the probability that the input image belongs to one of the 40 object classes. We treat such values as new features, which are fed to a regularized logistic regression classifier together with the scalar sensor measurements (Figure 11. The classifier is again trained according to k-fold cross-validation using as ground truth labels the waste materials.
4.3. Waste Classifier Location
- 1.
- Local recognition: first, we run the classifier on the Raspberry PI controlling the SWB. In this case, the SWB does not require any connection to an external server as all decisions are taken locally.
- 2.
- Cloud-based recognition: as a second test, we move the classifier on a cloud-based server hosted on Amazon Web Services EC2, located in Ireland. Data gathered from the WSM is transmitted to a listening process on the server: upon reception, the classifier is run and the response is transmitted back to the SWB. We used SCP to transfer data from the SWB to the server, while the MQTT protocol was used to reply from the server to the SWB.
- 3.
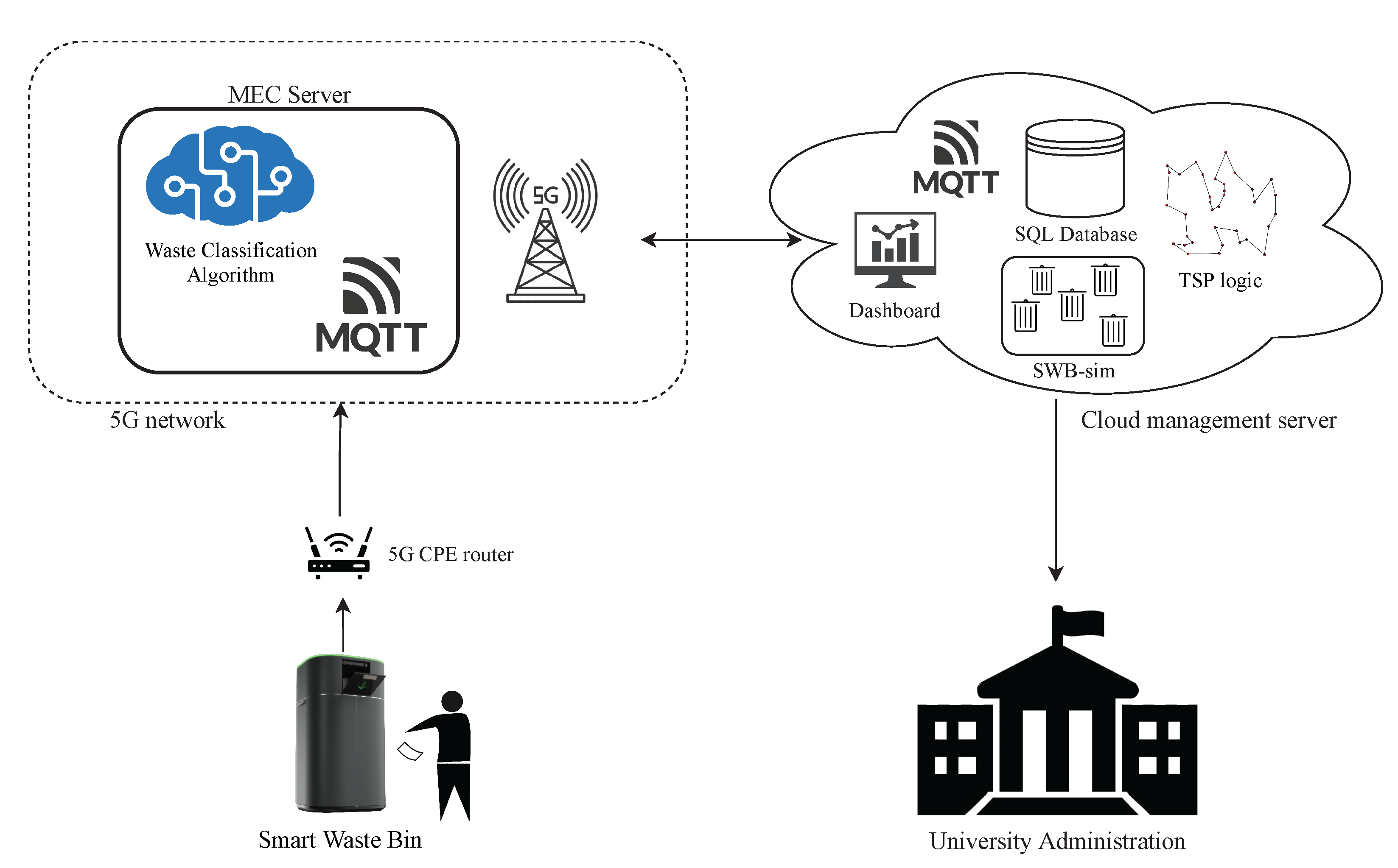
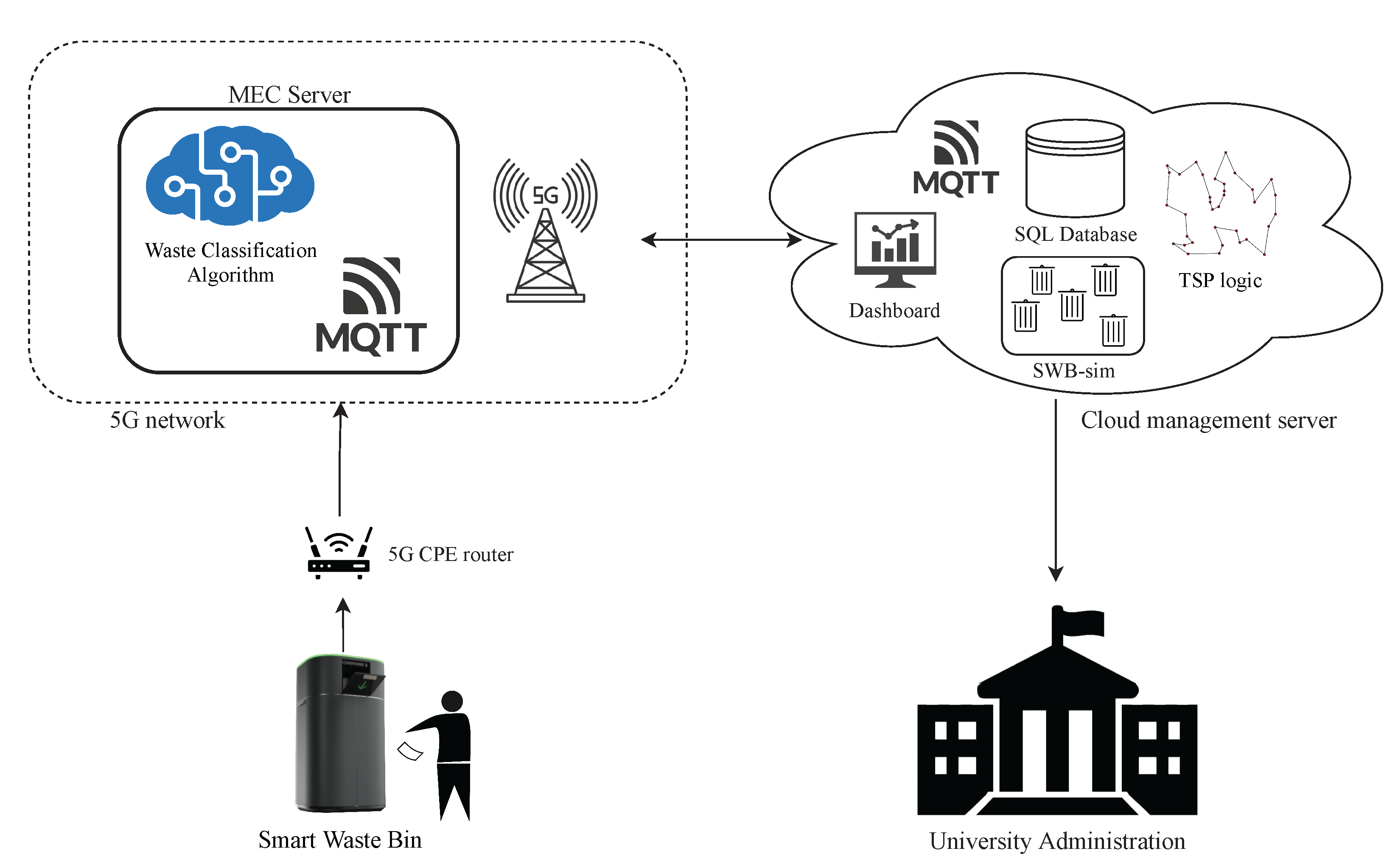
- MEC-based recognition: finally, we move the classifier on a multi-access edge computing server, provided by Vodafone Italia S.p.A, located in the core Vodafone network in Milan and running an Ubuntu Server machine with the same characteristics of the AWS EC2 instance. Access to the MEC is enabled by using the 5G connection through the Huawei 5G CPE router, which allows for a low-latency and high-bandwidth connection.
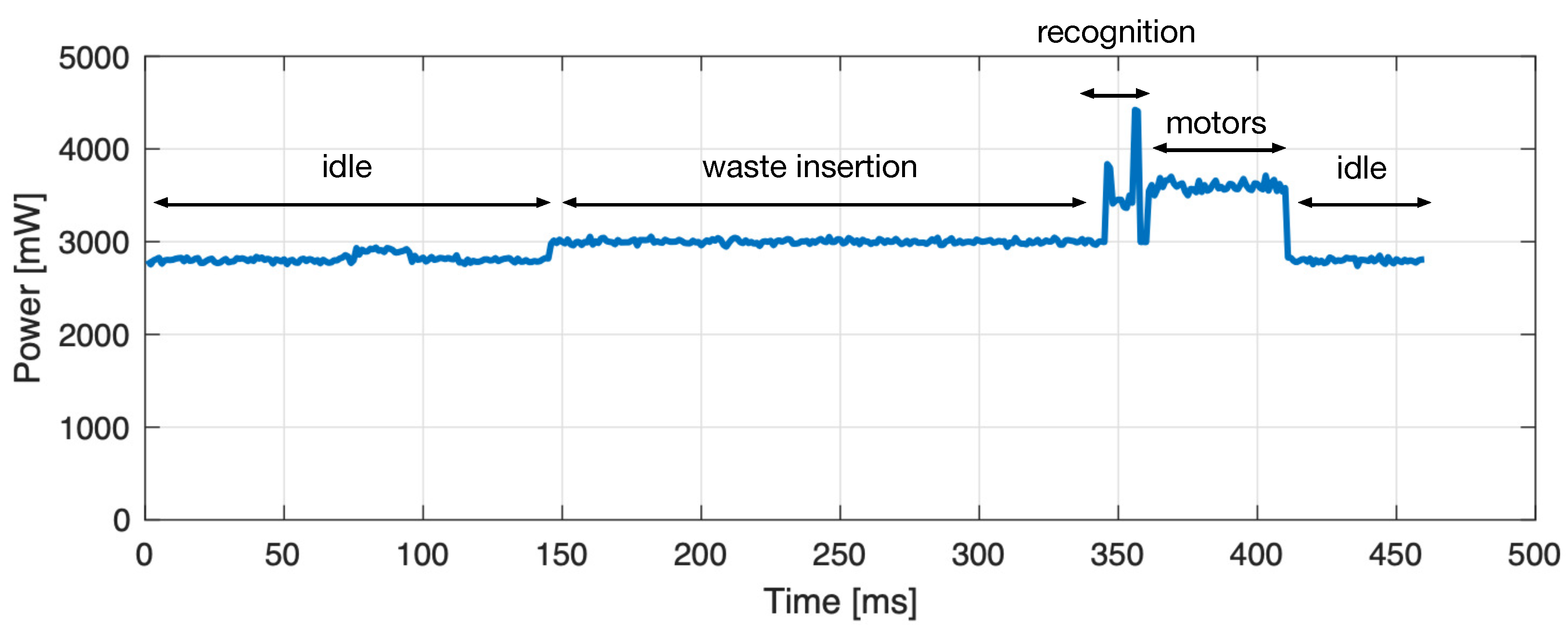
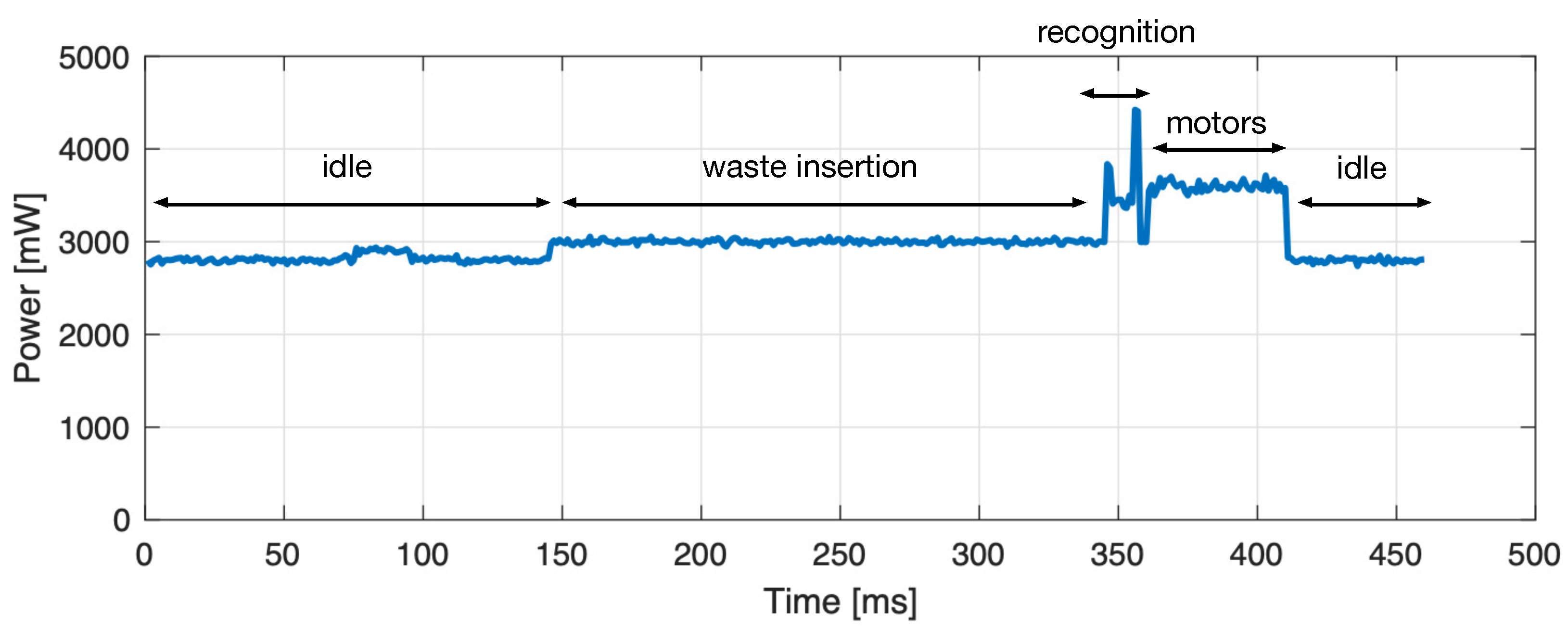
4.3.1. Recognition Time
4.3.2. Energy Consumption
5. Management Application
5.1. Smart Waste Bin Simulator (SWB-Sim)
5.2. Management Server
- 1.
- Data storage: the server runs an MQTT broker that accepts messages from the smart waste bins. Each module publishes messages on specific MQTT topics: for example, in a scenario with two SWBs named swb1 and swb2, the topic smartbin/swb1/fle/glass is used for publishing messages of the glass bag’s filling levels; while the topic smartbin/swb2/daily is used for communicating the daily usage summary of the recycling bin as a Json file. Upon reception of a message, the server reads its content and saves the received information in a local SQL database.
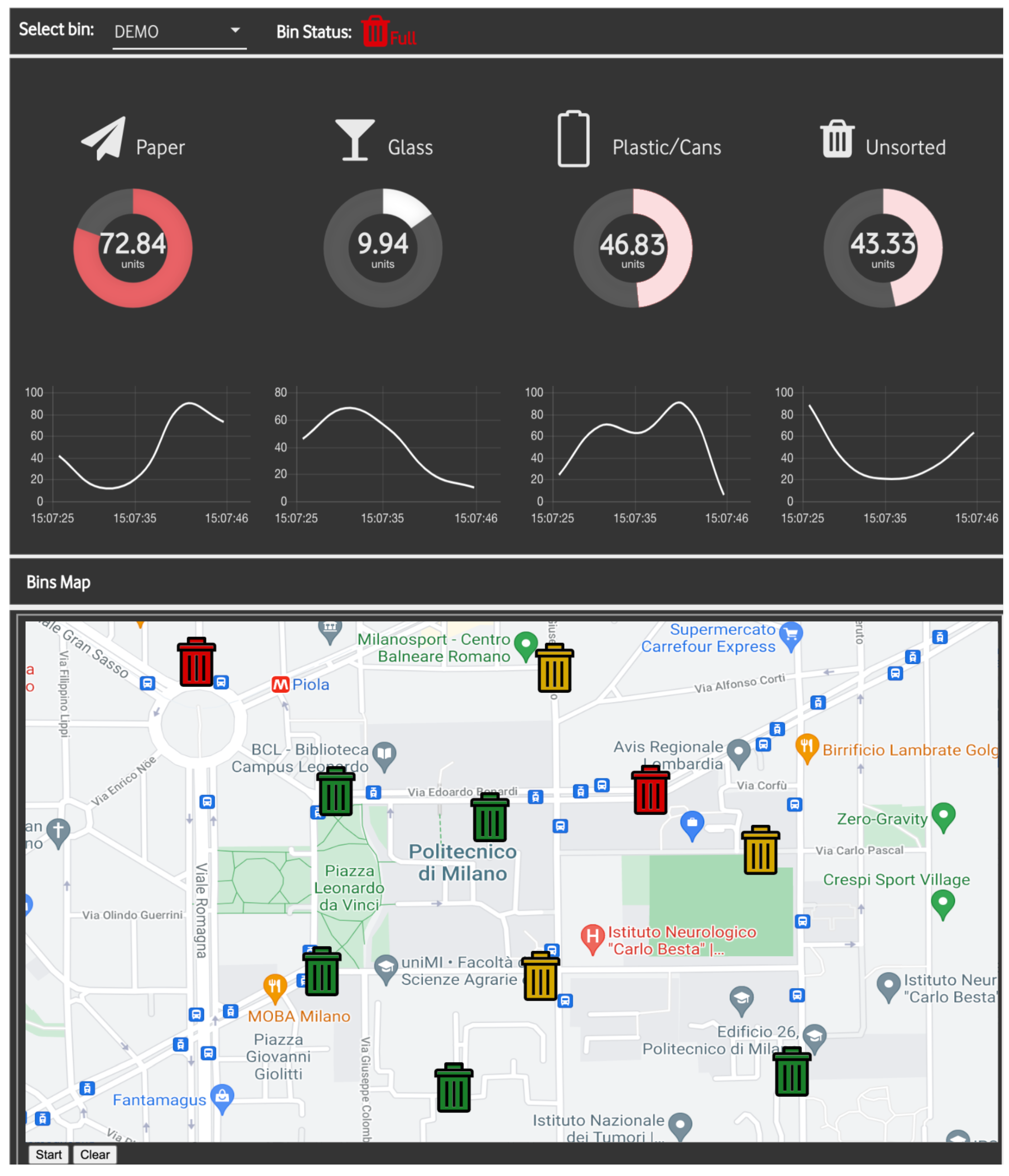
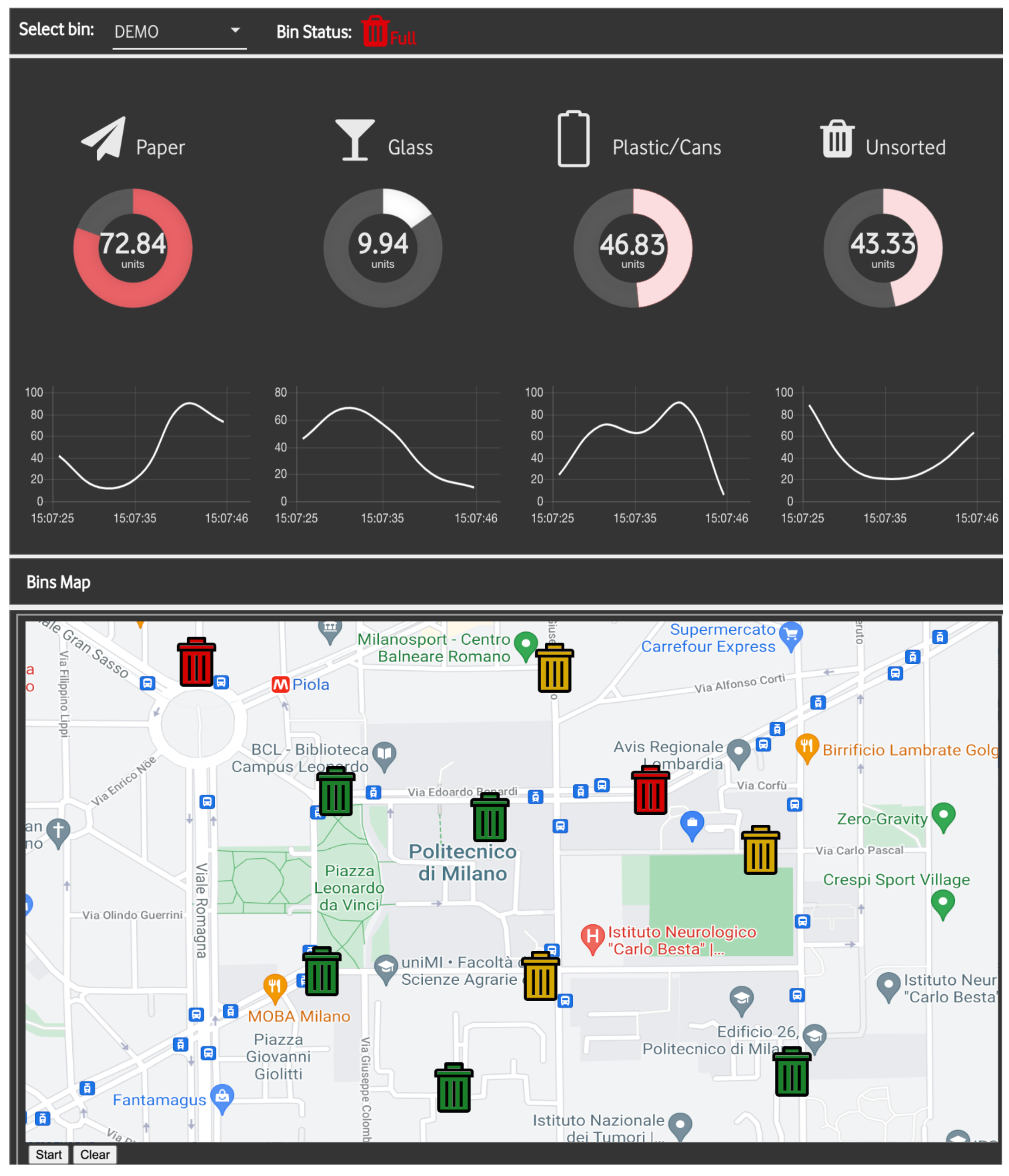
- 2.
- Data visualization: the server also provides a web-based dashboard for data visualization and monitoring purposes. The dashboard is implemented with Node-RED, a framework built on top of Node.js that has recently become very popular in IoT application development. As shown in Figure 13, the dashboard shows aggregated information for each smart waste bin connected to the system: (i) on the top part, the fill levels for the four materials with their daily correspondent trend represented in a chart; and (ii) in the bottom part, a map summarizing the status of all the SWBs present in an area, with different colours according to the overall fill level of each bin, allowing to easily keep track of the status of the bin from the landfill operators.
- 3.
- TSP for waste collection: The management server also allows to calculate an optimized route for the operator in charge of the waste collection. The task is faced as a Travelling Salesman Problem (TSP). In particular, the goal is to minimise the travelling time starting and finishing at a specific node (e.g., the landfill site) after visiting each other node exactly once. In particular, the nodes are represented by the bins and the weight on the links is the travel time of a specific road. Moreover, to avoid useless stops at an empty recycling bin, the SWB with a filling level lower than 75% of the total are automatically excluded by the TSP problem.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Min-Allah, N.; Alrashed, S. Smart campus—A sketch. Sustain. Cities Soc. 2020, 59, 102231. [Google Scholar] [CrossRef] [PubMed]
- Abuarqoub, A.; Abusaimeh, H.; Hammoudeh, M.; Uliyan, D.; Abu-Hashem, M.A.; Murad, S.; Al-Jarrah, M.; Al-Fayez, F. A survey on internet of things enabled smart campus applications. In Proceedings of the International Conference on Future Networks and Distributed Systems, Cambridge, UK, 19–20 July 2017; pp. 1–7. [Google Scholar]
- Mohandes, M.; Deriche, M.; Abuelma’atti, M.T.; Tasadduq, N. Preference-based smart parking system in a university campus. IET Intell. Transp. Syst. 2019, 13, 417–423. [Google Scholar] [CrossRef]
- Nagowah, S.D.; Sta, H.B.; Gobin-Rahimbux, B.A. An ontology for an IoT-enabled smart parking in a university campus. In Proceedings of the 2019 IEEE International Smart Cities Conference (ISC2), Casablanca, Morocco, 14–17 October 2019; pp. 474–479. [Google Scholar]
- Alrashed, S. Key performance indicators for Smart Campus and Microgrid. Sustain. Cities Soc. 2020, 60, 102264. [Google Scholar] [CrossRef]
- Antevski, K.; Redondi, A.E.; Pitic, R. A hybrid BLE and Wi-Fi localization system for the creation of study groups in smart libraries. In Proceedings of the 2016 9th IFIP Wireless and Mobile Networking Conference (WMNC), Colmar, France, 11–13 July 2016; pp. 41–48. [Google Scholar]
- Chan, H.C.; Chan, L. Smart library and smart campus. J. Serv. Sci. Manag. 2018, 11, 543–564. [Google Scholar] [CrossRef] [Green Version]
- Longo, E.; Redondi, A.E.; Bianchini, M.; Bolzan, P.; Maffei, S. Smart gate: A modular system for occupancy and environmental monitoring of spaces. In Proceedings of the 2020 5th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 1–4 July 2020; pp. 1–6. [Google Scholar]
- Tse, R.; Mirri, S.; Tang, S.K.; Pau, G.; Salomoni, P. Modelling and Visualizing People Flow in Smart Buildings: A Case Study in a University Campus. In Proceedings of the Conference on Information Technology for Social Good, Roma, Italy, 9–11 September 2021; pp. 309–312. [Google Scholar]
- Villegas-Ch, W.; Palacios-Pacheco, X.; Luján-Mora, S. Application of a smart city model to a traditional university campus with a big data architecture: A sustainable smart campus. Sustainability 2019, 11, 2857. [Google Scholar] [CrossRef] [Green Version]
- Ceccarini, C.; Mirri, S.; Salomoni, P.; Prandi, C. On exploiting Data Visualization and IoT for Increasing Sustainability and Safety in a Smart Campus. Mob. Netw. Appl. 2021, 26, 2066–2075. [Google Scholar] [CrossRef]
- Smyth, D.P.; Fredeen, A.L.; Booth, A.L. Reducing solid waste in higher education: The first step towards ‘greening’a university campus. Resour. Conserv. Recycl. 2010, 54, 1007–1016. [Google Scholar] [CrossRef]
- de Vega, C.A.; Ojeda-Benitez, S.; Ramirez-Barreto, M.E. Mexican educational institutions and waste management programmes: A University case study. Resour. Conserv. Recycl. 2003, 39, 283–296. [Google Scholar]
- Taghizadeh, S.; Ghassemzadeh, H.R.; Vahed, M.M.; Fellegari, R. Solid waste characterization and management within university campuses case study: University of Tabriz. Elixir Pollut. 2012, 43, 6650–6654. [Google Scholar]
- Okeniyi, J.O.; Anwan, E.U. Solid wastes generation in Covenant University, Ota, Nigeria: Characterisation and implication for sustainable waste management. J. Mater. Environ. Sci 2012, 3, 419–424. [Google Scholar]
- Eurostat Statistics Explained. Municipal Waste Statistics. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Municipal_waste_statistics (accessed on 22 May 2021).
- Ruiz Morales, M. Caracterizacion de residuos solidos en la Universidad Iberoamericana, Ciudad de Mexico. Rev. Int. Contam. Ambient. 2012, 28, 93–97. [Google Scholar]
- Gallardo, A.; Edo-Alcón, N.; Carlos, M.; Renau, M. The determination of waste generation and composition as an essential tool to improve the waste management plan of a university. Waste Manag. 2016, 53, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Longo, E.; Sahin, F.A.; Redondi, A.E.; Bolzan, P.; Bianchini, M.; Maffei, S. Take the trash out... to the edge. Creating a Smart Waste Bin based on 5G Multi-access Edge Computing. In Proceedings of the Conference on Information Technology for Social Good, Roma, Italy, 9–11 September 2021; pp. 55–60. [Google Scholar]
- Yusof, N.M.; Jidin, A.Z.; Rahim, M.I. Smart garbage monitoring system for waste management. In Proceedings of the MATEC Web of Conferences, Ho Chi Minh City, Vietnam, 5–6 August 2016; Volume 97, p. 01098. [Google Scholar]
- Dubey, S.; Singh, M.K.; Singh, P.; Aggarwal, S. Waste Management of Residential Society using Machine Learning and IoT Approach. In Proceedings of the 2020 International Conference on Emerging Smart Computing and Informatics (ESCI), Pune, India, 12–14 March 2020; pp. 293–297. [Google Scholar]
- Bano, A.; Ud Din, I.; Al-Huqail, A.A. AIoT-Based Smart Bin for Real-Time Monitoring and Management of Solid Waste. Sci. Program. 2020, 2020, 6613263. [Google Scholar] [CrossRef]
- Aleyadeh, S.; Taha, A.E.M. An IoT-Based architecture for waste management. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–4. [Google Scholar]
- Pardini, K.; Rodrigues, J.J.; Diallo, O.; Das, A.K.; de Albuquerque, V.H.C.; Kozlov, S.A. A smart waste management solution geared towards citizens. Sensors 2020, 20, 2380. [Google Scholar] [CrossRef] [Green Version]
- Kaushik, D.; Yadav, S. Multipurpose Street Smart Garbage bin based on Iot. Int. J. Adv. Res. Comput. Sci. 2017, 8, 1145–1149. [Google Scholar]
- Mesina, M.; De Jong, T.; Dalmijn, W. Improvements in separation of non-ferrous scrap metals using an electromagnetic sensor. Phys. Sep. Sci. Eng. 1970, 12, 87–101. [Google Scholar] [CrossRef] [Green Version]
- Rafeeq, M.; Alam, S. Automation of plastic, metal and glass waste materials segregation using arduino in scrap industry. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES), Piscataway, NJ, USA, 21–22 July 2016; pp. 1–5. [Google Scholar]
- Tiwari, C.; Nagarathna, K. Waste management using solar smart bin. In Proceedings of the 2017 International Conference on Energy, Communication, Data Analytics and Soft Computing (ICECDS), Chennai, India, 1–2 August 2017; pp. 1123–1126. [Google Scholar]
- Chowdhury, B.; Chowdhury, M.U. RFID-based real-time smart waste management system. In Proceedings of the 2007 Australasian Telecommunication Networks and Applications Conference, Christchurch, New Zealand, 2–5 December 2007; pp. 175–180. [Google Scholar]
- Sinha, A.; Couderc, P. Using Owl Ontologies for Selective Waste Sorting and Recycling. In Proceedings of the OWL: Experiences and Directions Workshop 2012, Heraklion, Greece, 27–28 May 2012; Volume 849. [Google Scholar]
- Costa, B.S.; Bernardes, A.C.; Pereira, J.V.; Zampa, V.H.; Pereira, V.A.; Matos, G.F.; Soares, E.A.; Soares, C.L.; Silva, A.F. Artificial intelligence in automated sorting in trash recycling. In Proceedings of the Anais do XV Encontro Nacional de Inteligência Artificial e Computacional, São Paulo, Brazil, 22–25 October 2018; pp. 198–205. [Google Scholar]
- Aral, R.A.; Keskin, Ş.R.; Kaya, M.; Hacıömeroğlu, M. Classification of trashnet dataset based on deep learning models. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Boston, MA, USA, 11–14 December 2018; pp. 2058–2062. [Google Scholar]
- Srinilta, C.; Kanharattanachai, S. Municipal solid waste segregation with CNN. In Proceedings of the 2019 5th International Conference on Engineering, Applied Sciences and Technology (ICEAST), Piscataway, NJ, USA, 2–5 July 2019; pp. 1–4. [Google Scholar]
- Shi, C.; Xia, R.; Wang, L. A Novel Multi-Branch Channel Expansion Network for Garbage Image Classification. IEEE Access 2020, 8, 154436–154452. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Thung, G. Trashnet GitHub Repository. Available online: https://github.com/garythung/trashnet (accessed on 22 May 2021).
- Norhafiza, S.; Masiri, K.; Faezah, A.N.; Nadiah, A.N.; Aslila, A. The effectiveness of segregation recyclable materials by automated motorized bin. J. Adv. Manuf. Technol. (JAMT) 2018, 12, 409–420. [Google Scholar]
- Kamarudin, N.H.; Abdullah, N.E.; Halim, I.S.A.; Hassan, S.L.M. Development of automatic waste segregator with monitoring system. In Proceedings of the 2019 4th International Conference on Information Technology, Information Systems and Electrical Engineering (ICITISEE), Piscataway, NJ, USA, 20–21 November 2019; pp. 190–195. [Google Scholar]
- Gondal, A.U.; Sadiq, M.I.; Ali, T.; Irfan, M.; Shaf, A.; Aamir, M.; Shoaib, M.; Glowacz, A.; Tadeusiewicz, R.; Kantoch, E. Real Time Multipurpose Smart Waste Classification Model for Efficient Recycling in Smart Cities Using Multilayer Convolutional Neural Network and Perceptron. Sensors 2021, 21, 4916. [Google Scholar] [CrossRef]
- Lozano, Á.; Caridad, J.; De Paz, J.F.; Villarrubia Gonzalez, G.; Bajo, J. Smart waste collection system with low consumption LoRaWAN nodes and route optimization. Sensors 2018, 18, 1465. [Google Scholar] [CrossRef] [Green Version]
- Baldo, D.; Mecocci, A.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A Multi-Layer LoRaWAN Infrastructure for Smart Waste Management. Sensors 2021, 21, 2600. [Google Scholar] [CrossRef]
- Stanford Vision Lab; Stanford University; Princeton University. ImageNet Database Website. Available online: https://www.image-net.org/index.php (accessed on 22 May 2021).
- Johansson, O.M. The effect of dynamic scheduling and routing in a solid waste management system. Waste Manag. 2006, 26, 875–885. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Glass | Coke bottle, Beck’s Beer, Aperol Bottle Heineken Beer, Jar, Red Beer, Water Bottle |
| Paper | Business Card, Candy Box, Cup, Flyers Paper Bag, Juice Box, Magazine, Paper Napkins, Newspaper |
| Plastic | Blue Bottle, White Bottle, Green Bottle Coffee Capsule Packet, Transparent Glass White Dish, Green Dish, Red Dish Cutlery, Tea bottle, Fiesta Snack, Yogurt Cup, Plastic Bag |
| Metal | Aluminium can, Metal Box, Aluminium Foil, Jar Lid |
| Unsorted | Backing Paper, Bic Pen, CD, Cigarettes, Lighter, Marker, Receipt |
| IS | CS | PS | |
|---|---|---|---|
| Glass | 0 ± 0.0 | 0.96 ± 0.23 | 14.28 ± 8.9 |
| Paper | 0 ± 0.0 | 0.12 ± 0.11 | 0.68 ± 0.6 |
| Plastic | 0 ± 0.0 | 0.12 ± 0.12 | 17.00 ± 8.7 |
| Metal | 0.93 ± 0.25 | 0.98 ± 0.12 | 4.35 ± 2.3 |
| Unsorted | 0 ± 0.0 | 0.18 ± 0.13 | 7.12 ± 3.2 |
| Predicted Class | ||||||
|---|---|---|---|---|---|---|
| True Class | Glass | Paper | Plastic | Metal | Unsorted | |
| Glass | 530 (97%) | 6 (1%) | 2 (<1%) | 8 (1%) | ||
| Paper | 697 (99%) | 5 (1%) | ||||
| Plastic | 1 (1%) | 44 (4%) | 846 (83%) | 123 (12%) | ||
| Metal | 2 (1%) | 310 (99%) | ||||
| Unsorted | 1 (<1%) | 35 (6%) | 96 (18%) | 414 (76%) | ||
| Predicted Class | ||||||
|---|---|---|---|---|---|---|
| True Class | Glass | Paper | Plastic | Metal | Unsorted | |
| Glass | 486 (89%) | 39 (7%) | 21 (4%) | |||
| Paper | 21 (3%) | 653 (93%) | 22 (3%) | 6 (1%) | ||
| Plastic | 40 (4%) | 963 (95%) | 11 (1%) | |||
| Metal | 3 (1%) | 4 (1%) | 283 (91%) | 22 (7%) | ||
| Unsorted | 11 (2%) | 4 (1%) | 6 (1%) | 7 (1%) | 518 (95%) | |
| Predicted Class | ||||||
|---|---|---|---|---|---|---|
| True Class | Glass | Paper | Plastic | Metal | Unsorted | |
| Glass | 535 (98%) | 3 (<1%) | 2 (<1%) | 0 | 6 (<1%) | |
| Paper | 2 (<1%) | 700 (99%) | ||||
| Plastic | 7 (1%) | 20 (2%) | 951 (94%) | 36 (3%) | ||
| Metal | 2 (<1%) | 310 (99%) | ||||
| Unsorted | 11 (2%) | 9 (2%) | 11 (2%) | 12 (2%) | 503 (92%) | |
| Predicted Class | ||||||
|---|---|---|---|---|---|---|
| True Class | Glass | Paper | Plastic | Metal | Unsorted | |
| Glass | 542 (99%) | 2 (<1%) | 2 (<1%) | |||
| Paper | 701 (99%) | 1 (<1%) | ||||
| Plastic | 1 (<1%) | 14 (1%) | 963 (95%) | 36 (3%) | ||
| Metal | 312 (100%) | |||||
| Unsorted | 6 (1%) | 7 (1%) | 13 (3%) | 520 (95%) | ||
| Local | Cloud Server | MEC Server | |
|---|---|---|---|
| Avg. Data Transfer Time (ms) | - | 343.3 | 191.3 |
| Avg. Classification Time (ms) | 3159.2 | 123.9 | 123.9 |
| Avg. Total Recognition Time (ms) | 3159.2 | 467.1 | 315.2 |
| Local | Cloud Server | MEC Server | |
|---|---|---|---|
| Bin Energy Consumption (J/object) | 11.69 | 1.28 | 0.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Longo, E.; Sahin, F.A.; Redondi, A.E.C.; Bolzan, P.; Bianchini, M.; Maffei, S. A 5G-Enabled Smart Waste Management System for University Campus. Sensors 2021, 21, 8278. https://doi.org/10.3390/s21248278
Longo E, Sahin FA, Redondi AEC, Bolzan P, Bianchini M, Maffei S. A 5G-Enabled Smart Waste Management System for University Campus. Sensors. 2021; 21(24):8278. https://doi.org/10.3390/s21248278
Chicago/Turabian StyleLongo, Edoardo, Fatih Alperen Sahin, Alessandro E. C. Redondi, Patrizia Bolzan, Massimo Bianchini, and Stefano Maffei. 2021. "A 5G-Enabled Smart Waste Management System for University Campus" Sensors 21, no. 24: 8278. https://doi.org/10.3390/s21248278
APA StyleLongo, E., Sahin, F. A., Redondi, A. E. C., Bolzan, P., Bianchini, M., & Maffei, S. (2021). A 5G-Enabled Smart Waste Management System for University Campus. Sensors, 21(24), 8278. https://doi.org/10.3390/s21248278