
Multipoint Wave Measurement in Tuned Liquid Damper Using Laser Doppler Vibrometer and Stepwise Rotating Galvanometer Scanner

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Considerations on the Proposed Scanning System
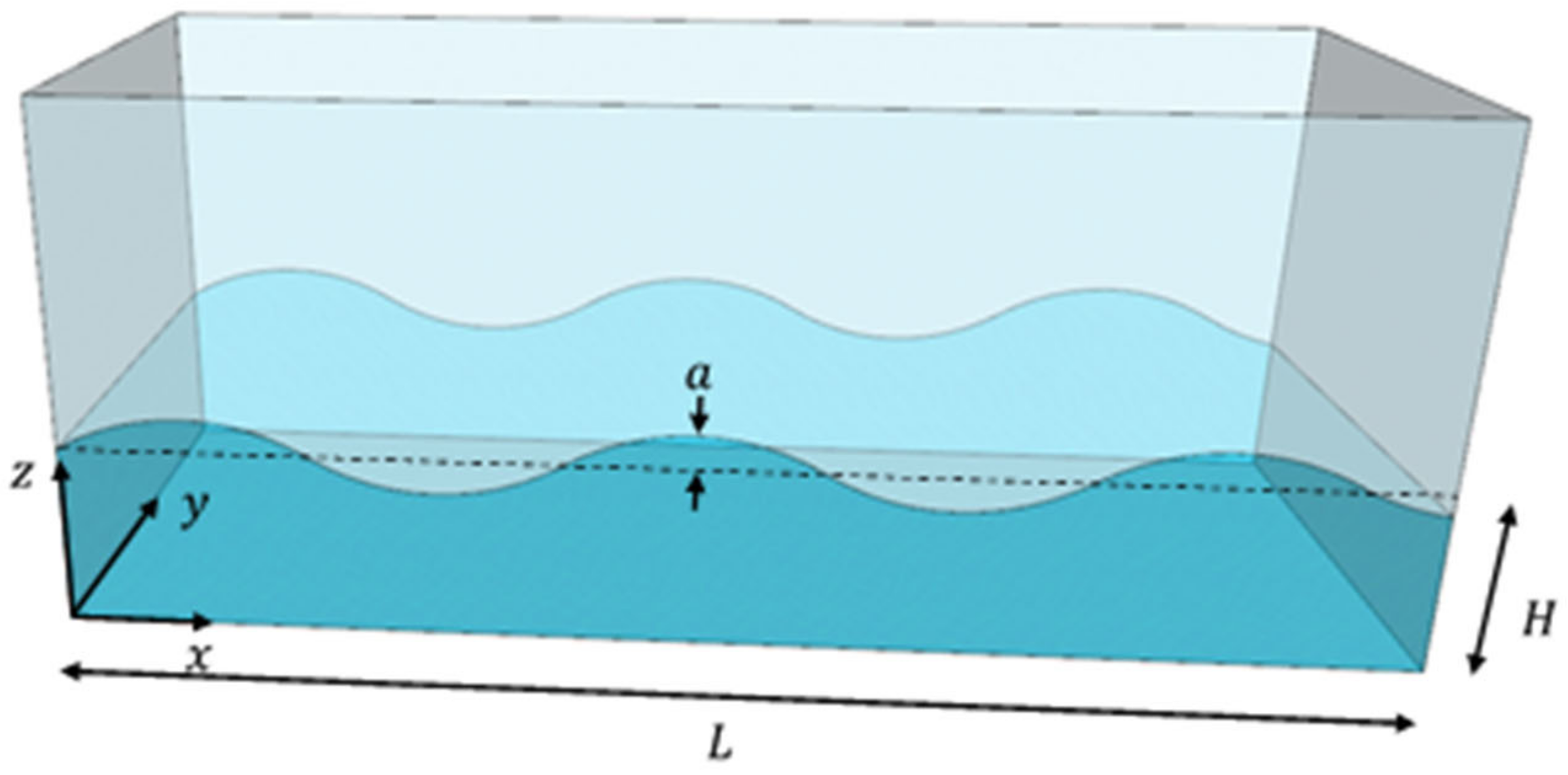
2.1. Natural Frequency of Liquid Motion in TLDs
2.2. Working Principle of the LDV
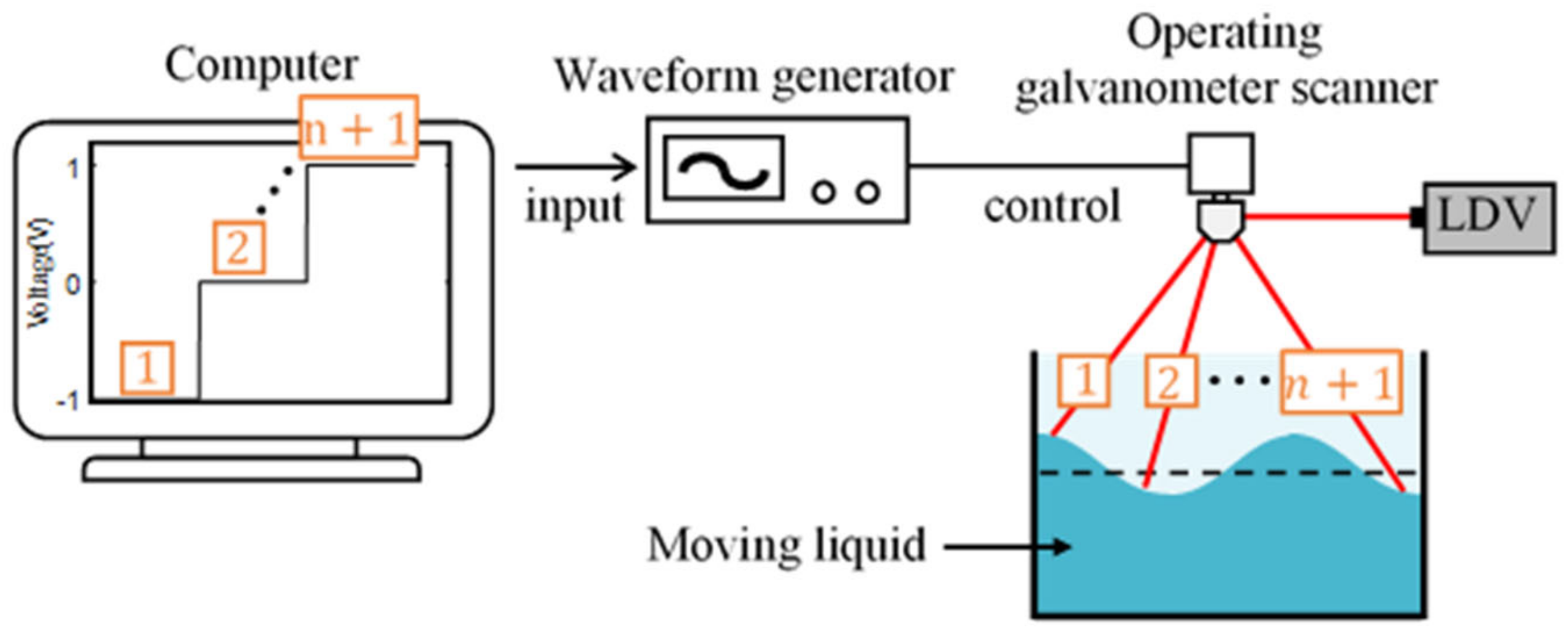
2.3. Proposed Scanning System
3. Experimental Investigations of the Proposed Scanning System
3.1. Experimental Setup
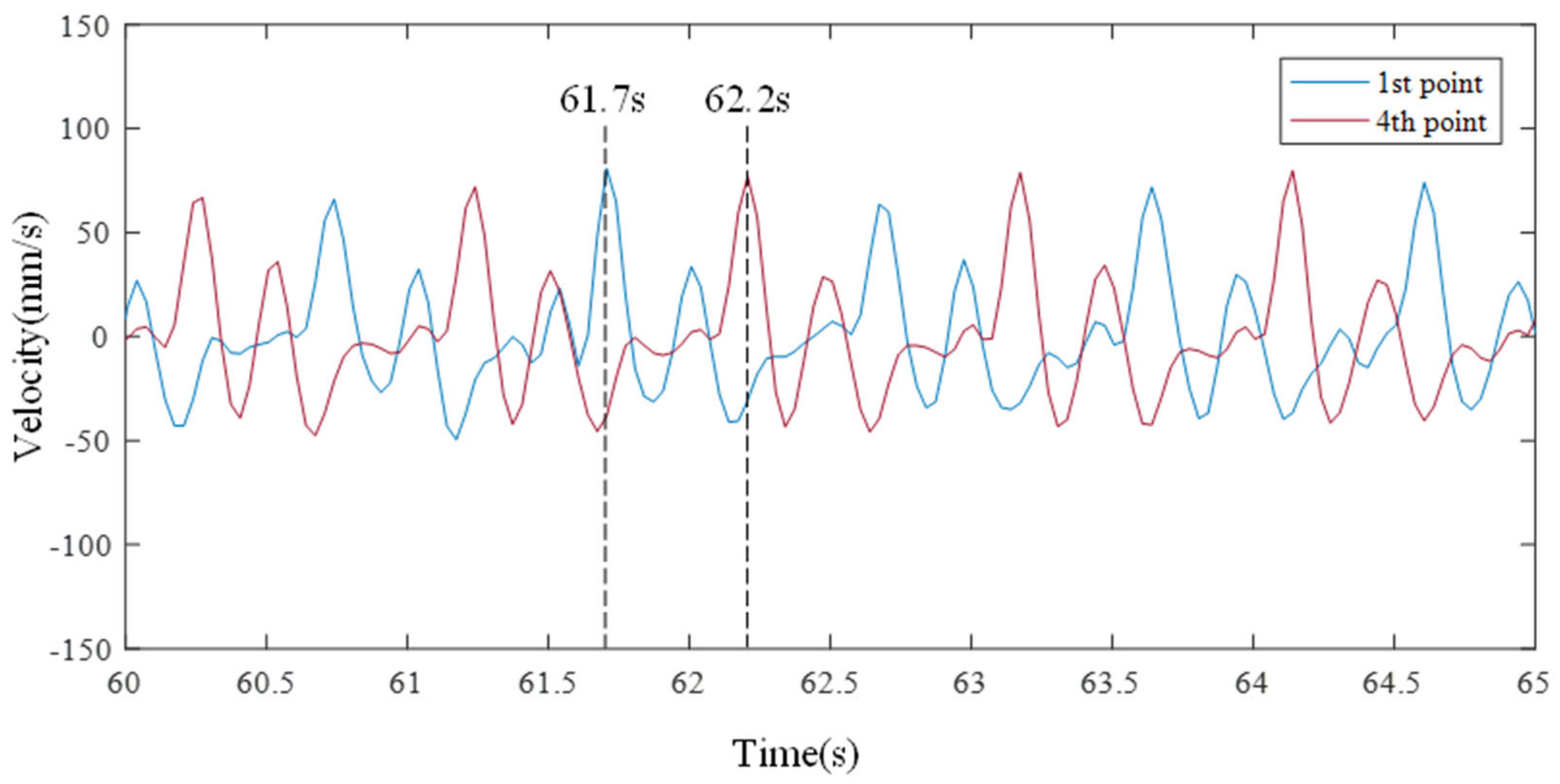
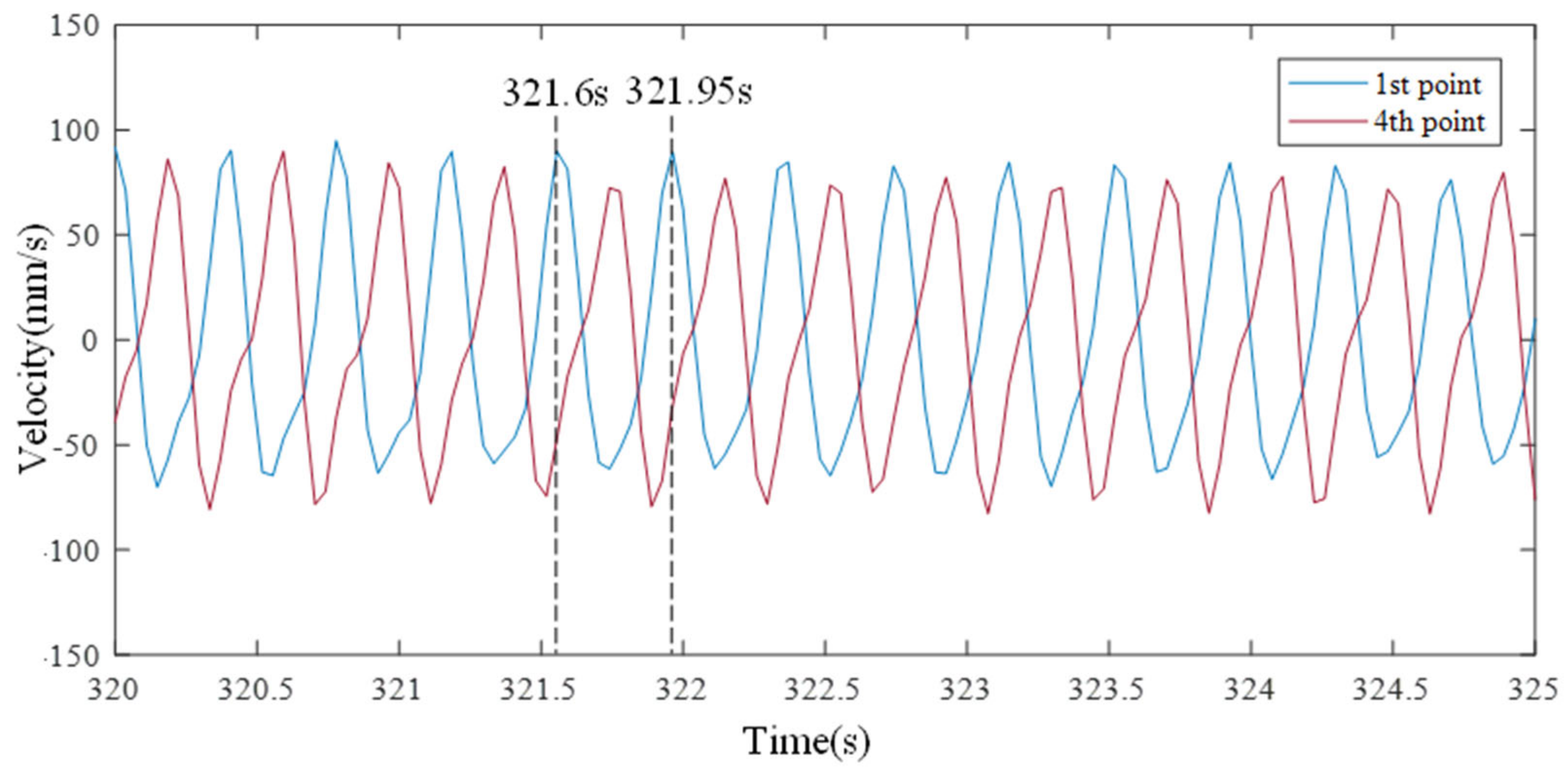
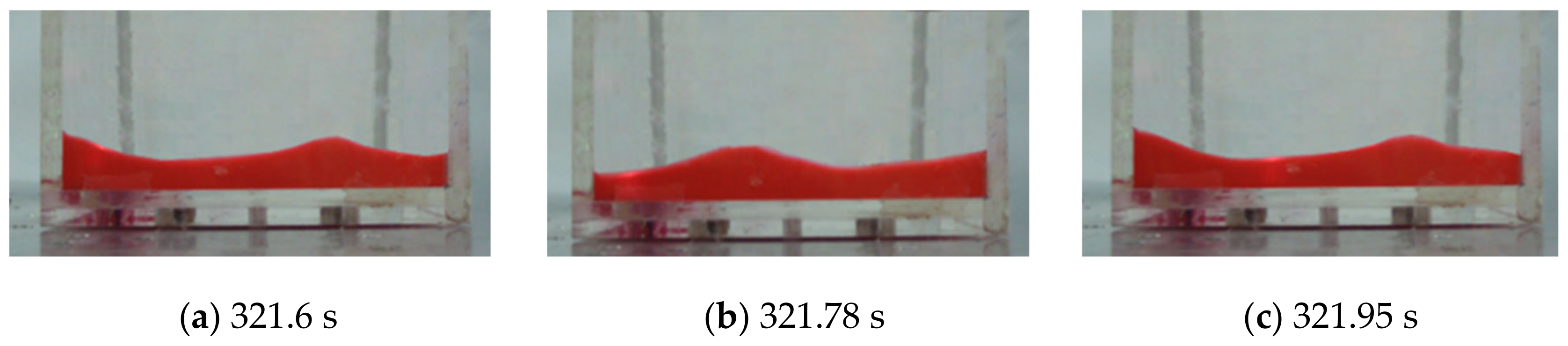
3.2. Experimental Results
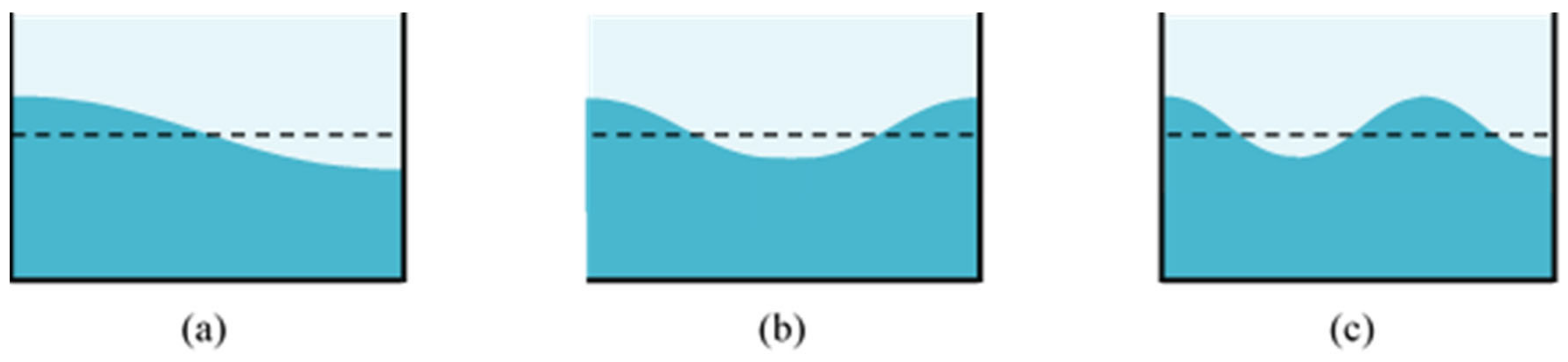
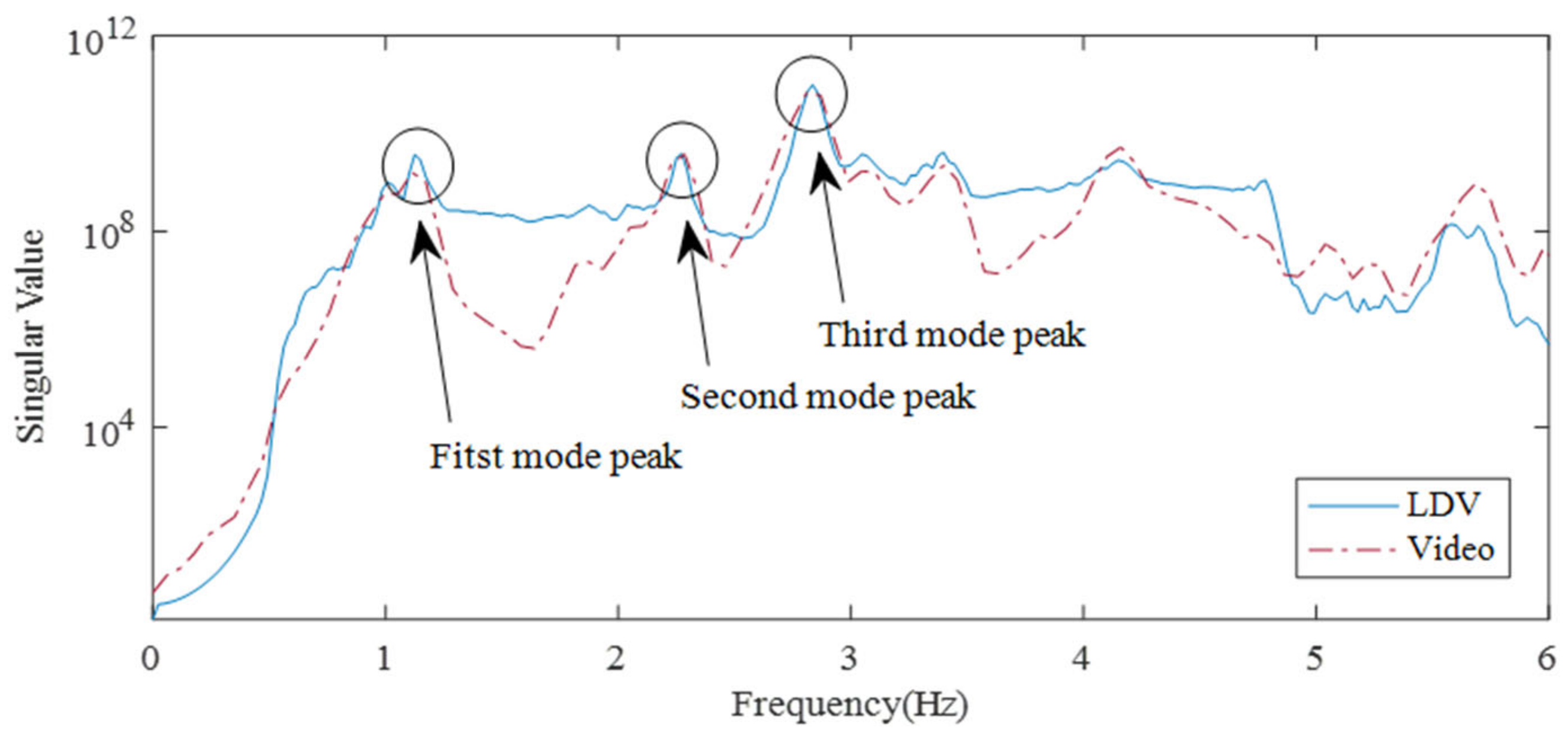
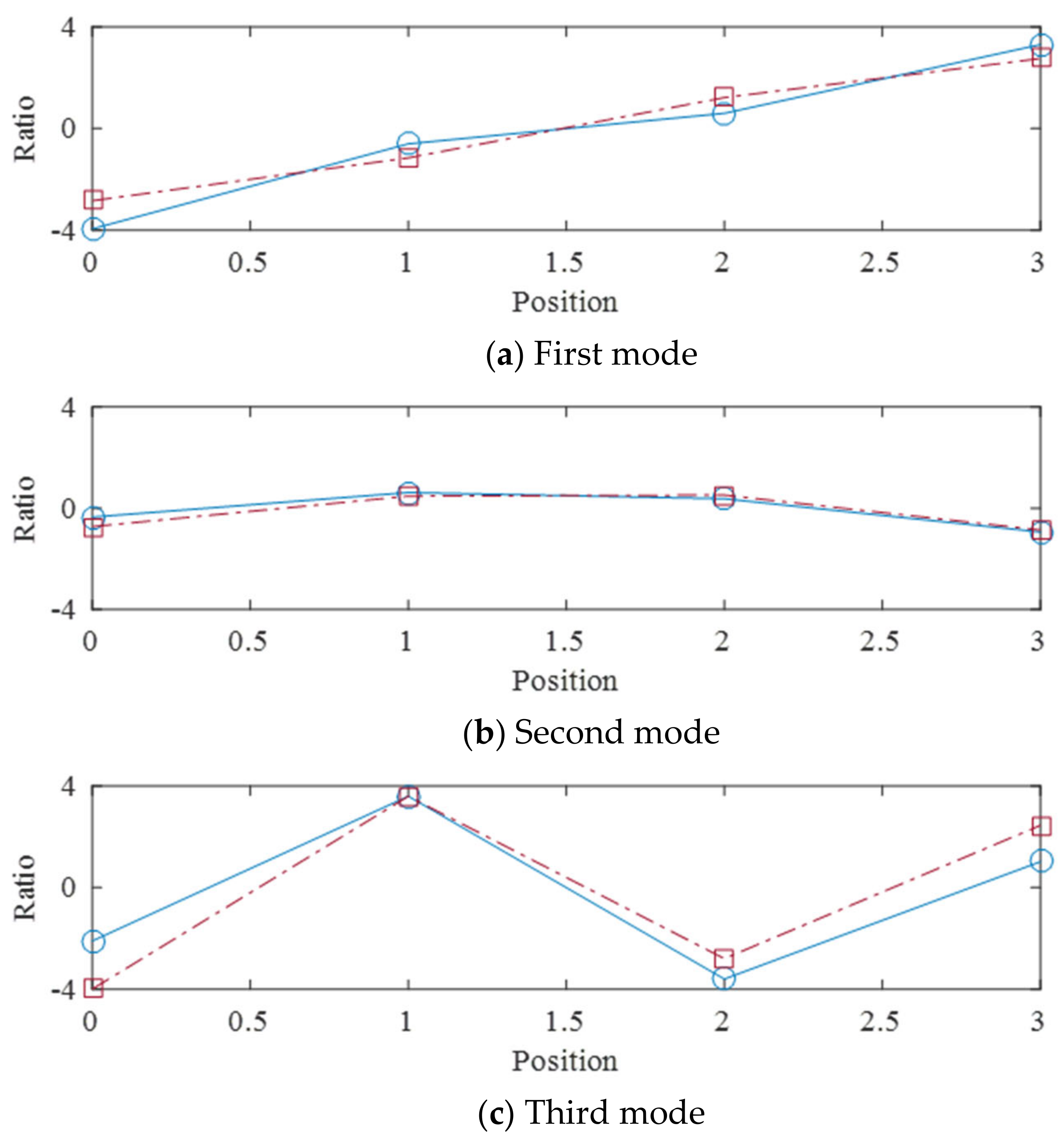
3.3. Mode Estimation of Liquid Motion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kareem, A.; Kijewski, T.; Tamura, Y. Mitigation of motions of tall buildings with specific examples of recent applications. Wind Struct. Int. J. 1999, 2, 201–251. [Google Scholar] [CrossRef] [Green Version]
- Károly, L.; Stan, O.; Miclea, L. Seismic Model Parameter Optimization for Building Structures. Sensors 2020, 20, 1980. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Den Hartog, J.P. Mechanical Vibrations; Courier Corporation: Chelmsford, MA, USA, 1985. [Google Scholar]
- Yin, X.; Song, G.; Liu, Y. Vibration Suppression of Wind/Traffic/Bridge Coupled System Using Multiple Pounding Tuned Mass Dampers (MPTMD). Sensors 2019, 19, 1133. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fujino, Y.; Sun, L.; Pacheco, B.M.; Chaiseri, P. Tuned Liquid Damper (TLD) for Suppressing Horizontal Motion of Structures. J. Eng. Mech. 1992, 118, 2017–2030. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Fujino, Y.; Pacheco, B.; Chaiseri, P. Modelling of tuned liquid damper (TLD). J. Wind Eng. 1992, 43, 1883–1894. [Google Scholar]
- Kwok, K.; Samali, B. Performance of tuned mass dampers under wind loads. Eng. Struct. 1995, 17, 655–667. [Google Scholar] [CrossRef]
- Min, K.-W.; Kim, J.; Kim, Y.-W. Design and test of tuned liquid mass dampers for attenuation of the wind responses of a full scale building. Smart Mater. Struct. 2014, 23, 45020. [Google Scholar] [CrossRef]
- Tamura, Y.; Fujii, K.; Ohtsuki, T.; Wakahara, T.; Kohsaka, R. Effectiveness of tuned liquid dampers under wind excitation. Eng. Struct. 1995, 17, 609–621. [Google Scholar] [CrossRef]
- Banerji, P.; Murudi, M.; Shah, A.H.; Popplewell, N.J.E. Tuned liquid dampers for controlling earthquake response of structures. Earthq. Eng. 2000, 29, 587–602. [Google Scholar] [CrossRef]
- Min, K.-W.; Kim, J.; Lee, H.-R. A design procedure of two-way liquid dampers for attenuation of wind-induced responses of tall buildings. J. Wind. Eng. Ind. Aerodyn. 2014, 129, 22–30. [Google Scholar] [CrossRef]
- Yu, J.; Wakahara, T.; Reed, D.A. A non-linear numerical model of the tuned liquid damper. Earthq. Eng. Struct. Dyn. 1999, 28, 671–686. [Google Scholar] [CrossRef]
- Wu, J.-C.; Shih, M.-H.; Lin, Y.-Y.; Shen, Y.-C. Design guidelines for tuned liquid column damper for structures responding to wind. Earthq. Eng. 2005, 27, 1893–1905. [Google Scholar] [CrossRef]
- Chang, C.; Qu, W.J.T. Unified dynamic absorber design formulas for wind-induced vibration control of tall buildings. Struct. Des. Tall Build. 1998, 7, 147–166. [Google Scholar] [CrossRef]
- Gao, H.; Kwok, K.; Samali, B. Optimization of tuned liquid column dampers. Eng. Struct. 1997, 19, 476–486. [Google Scholar] [CrossRef]
- Yalla, S.K.; Kareem, A. Optimum Absorber Parameters for Tuned Liquid Column Dampers. J. Struct. Eng. 2000, 126, 906–915. [Google Scholar] [CrossRef]
- Wu, J.-C.; Chang, C.-H.; Lin, Y.-Y. Optimal designs for non-uniform tuned liquid column dampers in horizontal motion. J. Sound Vib. 2009, 326, 104–122. [Google Scholar] [CrossRef]
- Maekawa, K.; Takeda, M.; Miyake, Y.; Kumakura, H. Sloshing Measurements inside a Liquid Hydrogen Tank with External-Heating-Type MgB2 Level Sensors during Marine Transportation by the Training Ship Fukae-Maru. Sensors 2018, 18, 3694. [Google Scholar] [CrossRef] [Green Version]
- Sohn, H. Noncontact laser sensing technology for structural health monitoring and nondestructive testing (presentation video). Bioinspir. Biomim. Bioreplication 2014, 9055, 90550W. [Google Scholar]
- Kim, S.-W.; Park, D.-U.; Jeon, B.-G.; Chang, S.-J. Non-Contact Water Level Response Measurement of a Tubular Level Gauge Using Image Signals. Sensors 2020, 20, 2217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ho, H.-N.; Lee, J.-H.; Park, Y.-S.; Lee, J.-J. A synchronized multipoint vision-based system for displacement measurement of civil infrastructures. Sci. World J. 2012, 2012, 519146. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. NDT E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Olaszek, P. Investigation of the dynamic characteristic of bridge structures using a computer vision method. Measurment 1999, 25, 227–236. [Google Scholar] [CrossRef]
- Choi, H.-S.; Cheung, J.-H.; Kim, S.-H.; Ahn, J.-H. Structural dynamic displacement vision system using digital image processing. NDT E Int. 2011, 44, 597–608. [Google Scholar] [CrossRef]
- Wahbeh, A.M.; Caffrey, J.P.; Masri, S.F. A vision-based approach for the direct measurement of displacements in vibrating systems. Smart Mater. Struct. 2003, 12, 785–794. [Google Scholar] [CrossRef]
- Xiao, T.; Zhao, S.; Qiu, X.; Halkon, B. Using a Retro-Reflective Membrane and Laser Doppler Vibrometer for Real-Time Remote Acoustic Sensing and Control. Sensors 2021, 21, 3866. [Google Scholar] [CrossRef] [PubMed]
- Shang, J.; He, Y.; Wang, Q.; Li, Y.; Ren, L.J.S. Development of a High-Resolution All-Fiber Homodyne Laser Doppler Vibrometer. Sensors 2020, 20, 5801. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Park, C.-S.; Min, K.-W. Fast vision-based wave height measurement for dynamic characterization of tuned liquid column dampers. Measurment 2016, 89, 189–196. [Google Scholar] [CrossRef]
- Cushman-Roisin, B.; Beckers, J.-M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Castellini, P.; Martarelli, P.; Tomasini, E.P. Laser Doppler Vibrometry: Development of advanced solutions answering to technology’s needs. Mech. Syst. Signal Process. 2006, 20, 1265–1285. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, Y.-S.; Kim, J. Multipoint Wave Measurement in Tuned Liquid Damper Using Laser Doppler Vibrometer and Stepwise Rotating Galvanometer Scanner. Sensors 2021, 21, 8211. https://doi.org/10.3390/s21248211
Shin Y-S, Kim J. Multipoint Wave Measurement in Tuned Liquid Damper Using Laser Doppler Vibrometer and Stepwise Rotating Galvanometer Scanner. Sensors. 2021; 21(24):8211. https://doi.org/10.3390/s21248211
Chicago/Turabian StyleShin, Yoon-Soo, and Junhee Kim. 2021. "Multipoint Wave Measurement in Tuned Liquid Damper Using Laser Doppler Vibrometer and Stepwise Rotating Galvanometer Scanner" Sensors 21, no. 24: 8211. https://doi.org/10.3390/s21248211
APA StyleShin, Y.-S., & Kim, J. (2021). Multipoint Wave Measurement in Tuned Liquid Damper Using Laser Doppler Vibrometer and Stepwise Rotating Galvanometer Scanner. Sensors, 21(24), 8211. https://doi.org/10.3390/s21248211