
Algorithms for Smooth, Safe and Quick Routing on Sensor-Equipped Grid Networks


Abstract
1. Introduction
2. Literature Review
3. Methodology: A Mathematical Formulation
3.1. Graph Model and Notation
- B-conflict, if and ,
- C-conflict, if either or .
3.2. Review of Relevant Previous Results
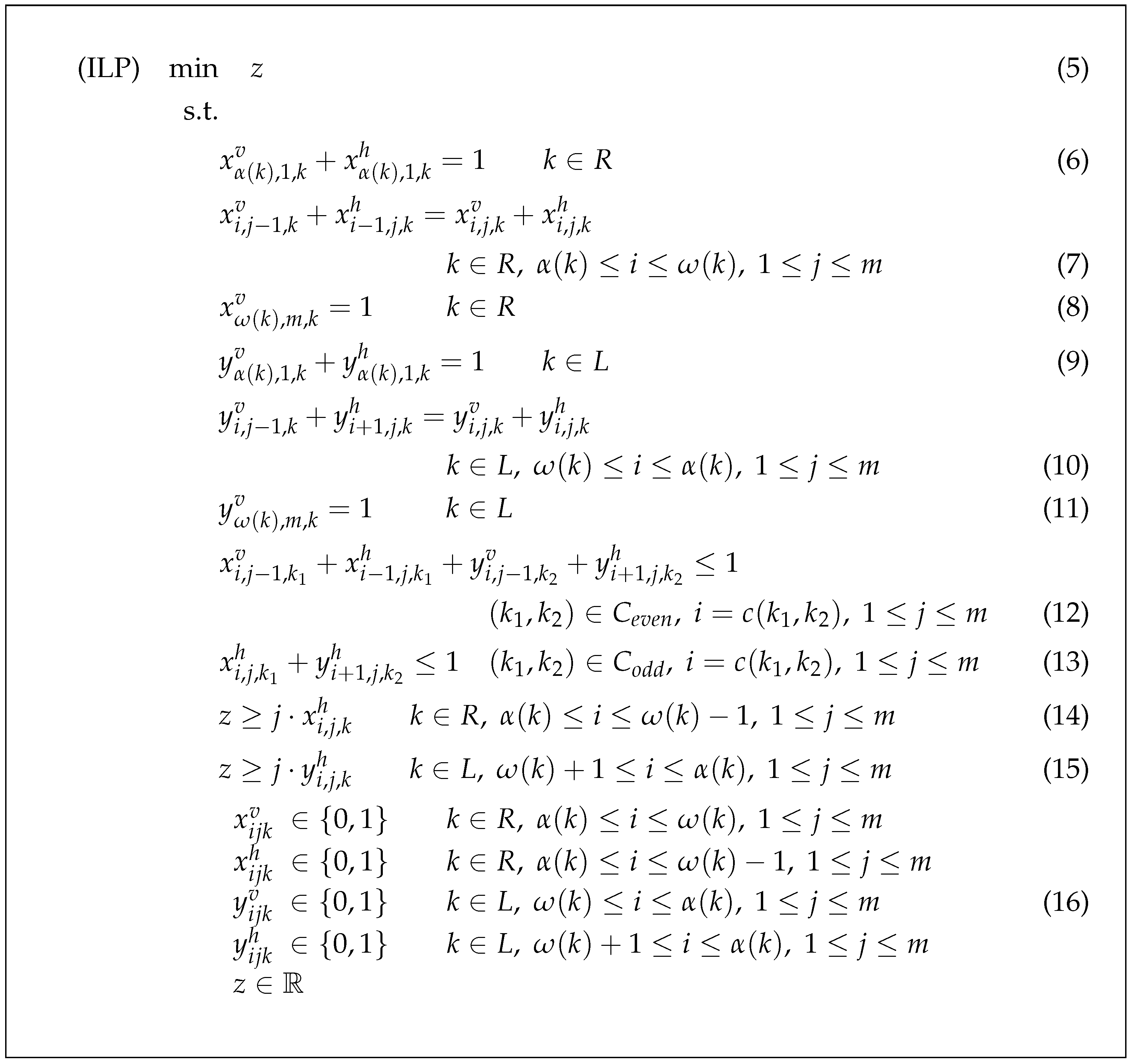
3.3. A Mathematical Programming Formulation
- variable is equal to 1 if the edge joining nodes and belongs to the chosen shortest path of vehicle k (and 0 otherwise); these variables are defined for every triplet such that and ;
- variable is equal to 1 if the edge joining nodes and belongs to the chosen shortest path of vehicle k (and 0 otherwise); these variables are defined for every triplet such that and .
- variable is equal to 1 if the edge joining nodes and belongs to the chosen shortest path of vehicle k (and 0 otherwise); these variables are defined for every triplet such that and ;
- variable is equal to 1 if the edge joining nodes and belongs to the chosen shortest path of vehicle k (and 0 otherwise); these variables are defined for every triplet such that and .
4. Heuristics
4.1. Heuristic A
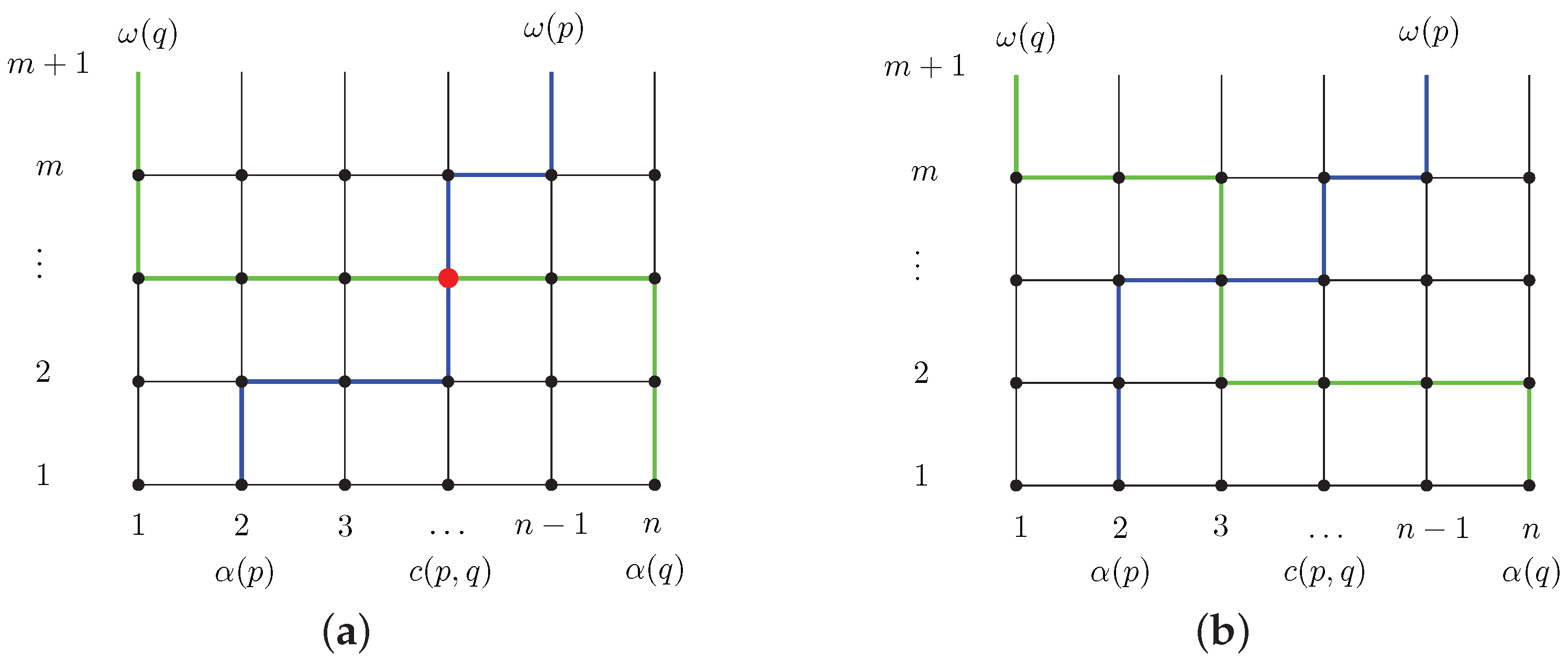
- Partition the set of vehicles into S, R and L and build the C-conflict directed graph F. Assume, without loss of generality, that a connected component with maximal height has the root in R (the case in L is similar).
- Let p be any vehicle in a connected component rooted in R, and let be its depth in F. The route of vehicle p is as follows: move vehicle p vertically on column to reach level , and then horizontally on level until column ; then move it vertically to its final destination.
- Let q be any vehicle in a connected component rooted in L, and let be its depth in F. The route of vehicle q is as follows: move vehicle q vertically on column to reach level , and then horizontally on level until column ; then move it vertically to its final destination.
- The route of vehicles in S contains vertical steps only.
4.2. Heuristic B
- : the depth of k in F;
- : length of the longest C-conflict path k belongs to. Notice that, if and are, respectively, the depth and the height of k in F, , and, in particular, if k is not involved in any C-conflict;
- : overall number of conflicts k is involved in;
- : number of edge conflicts k is involved in.
- Compute an upper bound on the number of required levels (it can be simply equal to the number of vehicles, or it can be obtained by running Heuristic A).
- Build the C-conflict directed graph F and, for each vehicle k, compute , , and ;
- Sort vehicles according to any order such that they appear by non-decreasing ;
- For each vehicle k in the determined order, assign k to the “lowest” available Manhattan path, as recursively defined by the following rule (given for the case , the case is similar):
- (a)
- let be the actual position of vehicle k in the grid (initially set to );
- (b)
- if and , then output “feasible path for k found” and consider the next vehicle;
- (c)
- if and all vehicles up to k in a C-conflict path are not involved in further conflicts, then k performs a vertical move;
- (d)
- otherwise, if , then check if the horizontal move to node involves any collision with previously assigned paths (this could be related to a node-conflict if, after a unit of time, another vehicle will be in node , or an edge conflict if another vehicle is performing the opposite move from to at the same time); if the answer is “no conflict”, then k performs the horizontal move to node ;
- (e)
- otherwise, check if the vertical move to involves any conflict with previously assigned paths (this could be a node-conflict if, after a unit of time, another vehicle will be in node ); if the answer is “no conflict”, then k vertically moves to node ;
- (f)
- otherwise, output “no feasible path for k found” and stop.
- Heuristic B1: vehicles are sorted in lexicographic order by decreasing , increasing , decreasing and decreasing ;
- Heuristic B2: vehicles are sorted in lexicographic order by increasing , decreasing , decreasing and decreasing .
5. Results
- determine to what extent, in terms of instance size and required running time, ILP is able to solve FQRP-G;
- assess the quality of the solutions output by Heuristic A (which, we recall, is optimal under one-way horizontal lanes and simple Manhattan paths hypothesis) in terms of additional required levels with respect to the (unrestricted) optimal solution provided by ILP;
- estimate the success rate of Heuristics B1 and B2 and their ability to find better solutions than Heuristic A.
6. Discussion
7. Conclusions
- a theoretical analysis provides properties of conflicting paths that have been exploited to devise improved mathematical models and solution algorithms for FQRP-G. In particular: ILP formulates the problem on a static graph model, whereas the formulations proposed by literature for problems related to FQRP-G rely on a dynamic (time-expanded) graph, thus requiring a larger number of variables and constraints; Heuristic A fairly improves the computational complexity with respect to the implementation proposed by [7];
- ILP, by means of state-of-the-art off-the-shelf mathematical optimization software, can solve instances of up to 100 vehicles in a few seconds at most, providing the minimum number of horizontal lanes and related routes. ILP can even solve larger instances of up to hundreds of vehicles, at the cost of longer running times, which may be not compliant with real route-execution environments;
- one of the proposed heuristics, called Heuristic A, is very efficient and effective, even for instances with hundreds of vehicles. It always runs in negligible time, and, with only rare exceptions that never showed up in random benchmarks, it finds routing paths requiring just a few horizontal lanes (one or two) more than the optimal solution;
- from a routing network design perspective, our empirical study shows that a grid with four or five horizontal lanes normally allows for finding collision-free nonstop Manhattan paths for all the vehicles of FQRP-G. With such sizing, the needing to integrate the routing system with further state-of-the-art algorithms for multi-agent pathfinding (as to optimize possible delays and deviations from shortest routes) is rare and limited to some infrequent exceptions where the methods proposed in this paper would require higher grids.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Andreatta, G.; De Giovanni, L.; Monaci, M. A fast heuristic for airport ground-service equipment-and-staff allocation. Procedia Soc. Behav. Sci. 2014, 108, 26–36. [Google Scholar] [CrossRef]
- Möhring, R.H.; Köhler, E.; Gawrilow, E.; Stenzel, B. Conflict-free real-time AGV routing. In Operations Research Proceedings 2004, Proceedings of the Operations Research 2004 Conference, Tilburg, The Netherlands, 1–3 September 2004; Fleuren, H., Hertog, D., Kort, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 18–24. [Google Scholar]
- Chung, S.H. Applications of smart technologies in logistics and transport: A review. Transp. Res. Part E Logist. Transp. Rev. 2021, 153, 102455. [Google Scholar] [CrossRef]
- Chocholáč, J.; Boháčová, L.; Kučera, T.; Sommerauerová, D. Innovation of the process of inventorying of the selected transport units: Case study in the automotive industry. LOGI Sci. J. Transp. Logist. 2017, 8, 48–55. [Google Scholar] [CrossRef][Green Version]
- Maghazei, O.; Netland, T.H.; Frauenberger, D.; Thalmann, T. Automatic drones for factory inspection: The role of virtual simulation. In Advances in Production Management Systems. Artificial Intelligence for Sustainable and Resilient Production Systems; Dolgui, A., Bernard, A., Lemoine, D., von Cieminski, G., Romero, D., Eds.; Springer: Cham, Switzerland, 2021; Volume 633, pp. 457–464. [Google Scholar]
- Stopka, O.; Kampf, R. Determining the most suitable layout of space for the loading units’ handling in the maritime port. Transport 2018, 33, 280–290. [Google Scholar] [CrossRef]
- Cenci, M.; Di Giacomo, M.; Mason, F. A note on a mixed routing and scheduling problem on a grid graph. J. Oper. Res. Soc. 2017, 68, 1363–1376. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, L. Trade-offs between stretch factor and load-balancing ratio in routing on growth-restricted graphs. IEEE Trans. Parallel Distrib. Syst. 2009, 20, 171–179. [Google Scholar]
- Vis, I.F.A. Survey of research in the design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 170, 677–709. [Google Scholar] [CrossRef]
- Kim, K.H.; Jeon, S.M.; Ryu, K.R. Deadlock prevention for automated guided vehicles in automated container terminals. In Container Terminals and Cargo Systems; Springer: Berlin/Heidelberg, Germany, 2007; pp. 243–263. [Google Scholar]
- Moorthy, R.; Hock-Guan, W.; Wing-Cheong, N.; Chung-Piaw, T. Cyclic deadlock prediction and avoidance for zone-controlled AGV system. Int. J. Prod. Econ. 2003, 83, 309–324. [Google Scholar] [CrossRef]
- Zheng, K.; Tang, D.; Gu, W.; Dai, M. Distributed control of multi-AGV system based on regional control model. Prod. Eng. 2013, 7, 433–441. [Google Scholar] [CrossRef]
- Wu, N.Q.; Zhou, M.C. Resource-oriented Petri nets for deadlock avoidance in automated manufacturing. In Proceedings of the 2000 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 3377–3382. [Google Scholar]
- Wu, N.Q.; Zhou, M.C. Modeling and deadlock avoidance of automated manufacturing systems with multiple automated guided vehicles. IEEE Trans. Syst. Man Cybern. Part B 2005, 35, 1193–1202. [Google Scholar] [CrossRef]
- Cho, H.B.; Kumaran, T.K.; Wysk, R.A. Graph theoretic deadlock detection and resolution for flexible manufacturing systems. IEEE Trans. Robot. Autom. 1995, 11, 413–421. [Google Scholar]
- Zhai, W.; Tong, X.; Miao, S.; Cheng, C.; Ren, F. Collision detection for UAVs based on GeoSOT-3D grids. ISPRS Int. J. Geo-Inf. 2019, 8, 299. [Google Scholar] [CrossRef]
- Koszelew, J.; Karbowska-Chilinska, J.; Ostrowski, K.; Kuczyński, P.; Kulbiej, E.; Wołejsza, P. Beam search algorithm for anti-collision trajectory planning for many-to-many encounter situations with autonomous surface vehicles. Sensors 2020, 20, 4115. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, Q.; Chen, J.; Yuan, P. Collision-free route planning for multiple AGVs in an automated warehouse based on collision classification. IEEE Access 2018, 6, 26022–26035. [Google Scholar] [CrossRef]
- Gawrilow, E.; Klimm, M.; Möhring, R.H.; Stenzel, B. Conflict-free vehicle routing. EURO J. Transp. Logist. 2012, 1, 87–111. [Google Scholar] [CrossRef]
- Alon, N.; Yuster, R.; Zwick, U. Color-coding. J. Assoc. Comput. Mach. 1995, 42, 844–856. [Google Scholar] [CrossRef]
- Krishnamurthy, N.; Batta, R.; Karwan, M. Developing conflict-free routes for automated guided vehicles. Oper. Res. 1993, 41, 1077–1090. [Google Scholar] [CrossRef]
- Qiu, L.; Hsu, W.J. A bi-directional path layout for conflict-free routing of AGVs. Int. J. Prod. Res. 2001, 39, 2177–20195. [Google Scholar] [CrossRef]
- Davoodi, M.; Abedinb, M.; Banyassady, B.; Khanteimouri, P.; Mohadesb, A. An optimal algorithm for two robots path planning problem on the grid. Robot. Auton. Syst. 2013, 61, 1406–1414. [Google Scholar] [CrossRef]
- Gawrilow, E.; Köhler, E.; Möhring, R.H.; Stenzel, B. Dynamic routing of automated guided vehicles in real-time. In Mathematics: Key Technology for the Future. Joint Projects between Universities and Industry 2004–2007; Jäger, W., Krebs, H.J., Eds.; Springer: Berlin, Germany, 2008; pp. 165–178. [Google Scholar]
- Yu, J.; La Valle, S.M. Planning optimal paths for multiple robots on graphs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Ahuja, R.K.; Magnanti, T.L.; Orlin, J.B. Network Flows: Theory, Algorithms, and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Zafar, M.N.; Mohanta, J.C. Methodology for path planning and optimization of mobile robots: A review. Procedia Comput. Sci. 2018, 133, 141–152. [Google Scholar] [CrossRef]
- Yuan, R.; Dong, T.; Li, J. Research on the collision-free path planning of multi-AGVs system based on improved A* algorithm. Am. J. Oper. Res. 2016, 6, 442–449. [Google Scholar] [CrossRef]
- Mugarza, I.; Mugarza, J.C. A coloured Petri net- and D* Lite-based traffic controller for Automated Guided Vehicles. Electronics 2021, 10, 2235. [Google Scholar] [CrossRef]
- Santos, J.; Rebelo, P.M.; Rocha, L.F.; Costa, P.; Veiga, G. A* based routing and scheduling modules for multiple AGVs in an industrial scenario. Robotics 2021, 10, 72. [Google Scholar] [CrossRef]
- Sharon, G.; Stern, R.; Felner, R.; Sturtevant, N.R. Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 2015, 219, 40–66. [Google Scholar] [CrossRef]
- Atzmon, D.; Stern, R.; Felner, A.; Wagner, G.; Barták, R.; Zhou, N. Robust multi-agent path finding and executing. J. Artif. Intell. Res. 2020, 67, 549–579. [Google Scholar] [CrossRef]
- Lübbecke, E.; Lübbecke, M.E.; Möhring, R.H. Ship traffic optimization for the Kiel canal. Oper. Res. 2019, 67, 791–812. [Google Scholar] [CrossRef]
- Eichler, D.; Bar-Gera, H.; Blachman, M. Vortex-based zero-conflict design of urban road networks. Netw. Spat. Econ. 2013, 13, 229–254. [Google Scholar] [CrossRef]
- Boyles, S.D.; Rambha, T.; Xie, C. Equilibrium analysis of low-conflict network designs. Transp. Res. Rec. 2014, 2467, 129–139. [Google Scholar] [CrossRef]
- Liyanage, S.P.; Pravinvongvuth, S. Obtaining the optimum block length of the Chet network: An at-grade transportation network without signalized intersections, roundabouts, or stop signs. Engineer 2018, 50, 37–46. [Google Scholar] [CrossRef]
- Lin, X.; Li, M.; Shen, Z.M.; Yin, Y.; He, F. Rhythmic control of automated traffic—Part II: Grid network rhythm and online routing. Transp. Sci. 2021, 55, 988–1009. [Google Scholar] [CrossRef]
- Andreatta, G.; De Giovanni, L.; Salmaso, G. Fleet quickest routing on grids: A polynomial algorithm. Int. J. Pure Appl. Math. 2010, 62, 419–432. [Google Scholar]
- Andreatta, G.; De Francesco, C.; De Giovanni, L.; Salmaso, G. A Note on FQRP-G. Available online: http://www.math.unipd.it/~luigi/manuscripts/FQRP-G/fqrp.pdf (accessed on 2 December 2021).
- Di Giacomo, M.; Mason, F.; Cenci, M. A note on solving the Fleet Quickest Routing Problem on a grid graph. Cent. Eur. J. Oper. Res. 2020, 28, 1069–1090. [Google Scholar] [CrossRef]
- Garey, M.R.; Johnson, D.S. Computers and Intractability: A Guide to the Theory of NP-Completeness; W. H. Freeman & Co.: New York, NY, USA, 1979. [Google Scholar]
- Achterberg, T.; Bixby, R.E.; Gu, Z.; Rothberg, E.; Weninger, D. Presolve reductions in Mixed Integer Programming. INFORMS J. Comput. 2020, 32, 473–506. [Google Scholar] [CrossRef]
- Wolsey, L.A. Integer Programming, 2nd ed.; Wiley: Hoboken, NJ, USA, 2020. [Google Scholar]
- IBM CPLEX Optimizer. Available online: https://www.ibm.com/it-it/analytics/cplex-optimizer (accessed on 15 November 2021).



{kind=link}
{kind=link}
| Instance | ILP | Heur A | |||||
|---|---|---|---|---|---|---|---|
| n | Avg | Min–Max | Time | Avg | Err% | Min–Max | |
| 10 | 2.2 | 2–3 | 0.02 | 2.25 | 0.0 | 2–3 | 0 |
| 25 | 2.4 | 2–3 | 0.09 | 2.95 | 15.0 | 2–4 | 1 |
| 50 | 3.0 | 3–3 | 0.79 | 3.50 | 20.0 | 3–5 | 1 |
| 75 | 2.9 | 2–3 | 1.75 | 3.45 | 15.0 | 3–4 | 1 |
| 100 | 3.1 | 3–4 | 5.90 | 3.75 | 23.3 | 3–5 | 2 |
| 150 | 3.0 | 3–3 | 42.54 | 4.05 | 30.0 | 3–5 | 2 |
| 200 | 3.0 | 3–3 | 151.33 | 4.25 | 40.0 | 3–5 | 2 |
| 300 | 3.0 | 3–3 | 1099.91 | 4.30 | 43.3 | 4–5 | 2 |
| Heur B1 | Heur B2 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| n | Succ% | Avg | Err% | Min–Max | Win-Lose% | Succ% | Avg | Err% | Min–Max | Win-Lose% | ||
| 10 | 90 | 2.72 | 50.00 | 2–4 | 2 | 5–40 | 90 | 2.72 | 50.00 | 2–4 | 2 | 5–40 |
| 25 | 40 | 3.75 | 56.25 | 2–5 | 3 | 5–30 | 55 | 3.64 | 55.56 | 2–5 | 3 | 10–35 |
| 50 | 5 | 4.00 | 33.33 | 4–4 | 1 | 0–0 | 5 | 3.00 | 0.00 | 3–3 | 0 | 100–0 |
| ≥75 | 0 | – | – | – | – | – | 0 | – | – | – | – | – |
| Instance | Heur A | ILP | ||
|---|---|---|---|---|
| Longest C-Path | Used Levels | Used Levels | Time | |
| 105 | 27 | 28 | 4 | 2.88 |
| 117 | 30 | 31 | 4 | 2.63 |
| 129 | 33 | 34 | 4 | 4.11 |
| 141 | 36 | 37 | 3 | 4.44 |
| 153 | 39 | 40 | 4 | 10.50 |
| 161 | 41 | 42 | 4 | 7.49 |
| 173 | 44 | 45 | 4 | 10.63 |
| 189 | 48 | 49 | 4 | 16.92 |
| 201 | 51 | 52 | 4 | 13.61 |
| 221 | 56 | 57 | 4 | 22.11 |
| 233 | 59 | 60 | 4 | 38.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andreatta, G.; De Francesco, C.; De Giovanni, L. Algorithms for Smooth, Safe and Quick Routing on Sensor-Equipped Grid Networks. Sensors 2021, 21, 8188. https://doi.org/10.3390/s21248188
Andreatta G, De Francesco C, De Giovanni L. Algorithms for Smooth, Safe and Quick Routing on Sensor-Equipped Grid Networks. Sensors. 2021; 21(24):8188. https://doi.org/10.3390/s21248188
Chicago/Turabian StyleAndreatta, Giovanni, Carla De Francesco, and Luigi De Giovanni. 2021. "Algorithms for Smooth, Safe and Quick Routing on Sensor-Equipped Grid Networks" Sensors 21, no. 24: 8188. https://doi.org/10.3390/s21248188
APA StyleAndreatta, G., De Francesco, C., & De Giovanni, L. (2021). Algorithms for Smooth, Safe and Quick Routing on Sensor-Equipped Grid Networks. Sensors, 21(24), 8188. https://doi.org/10.3390/s21248188