
Influence of Bubble Deformation on the Signal Characteristics Generated Using an Optical Fiber Gas–liquid Two-Phase Flow Sensor



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
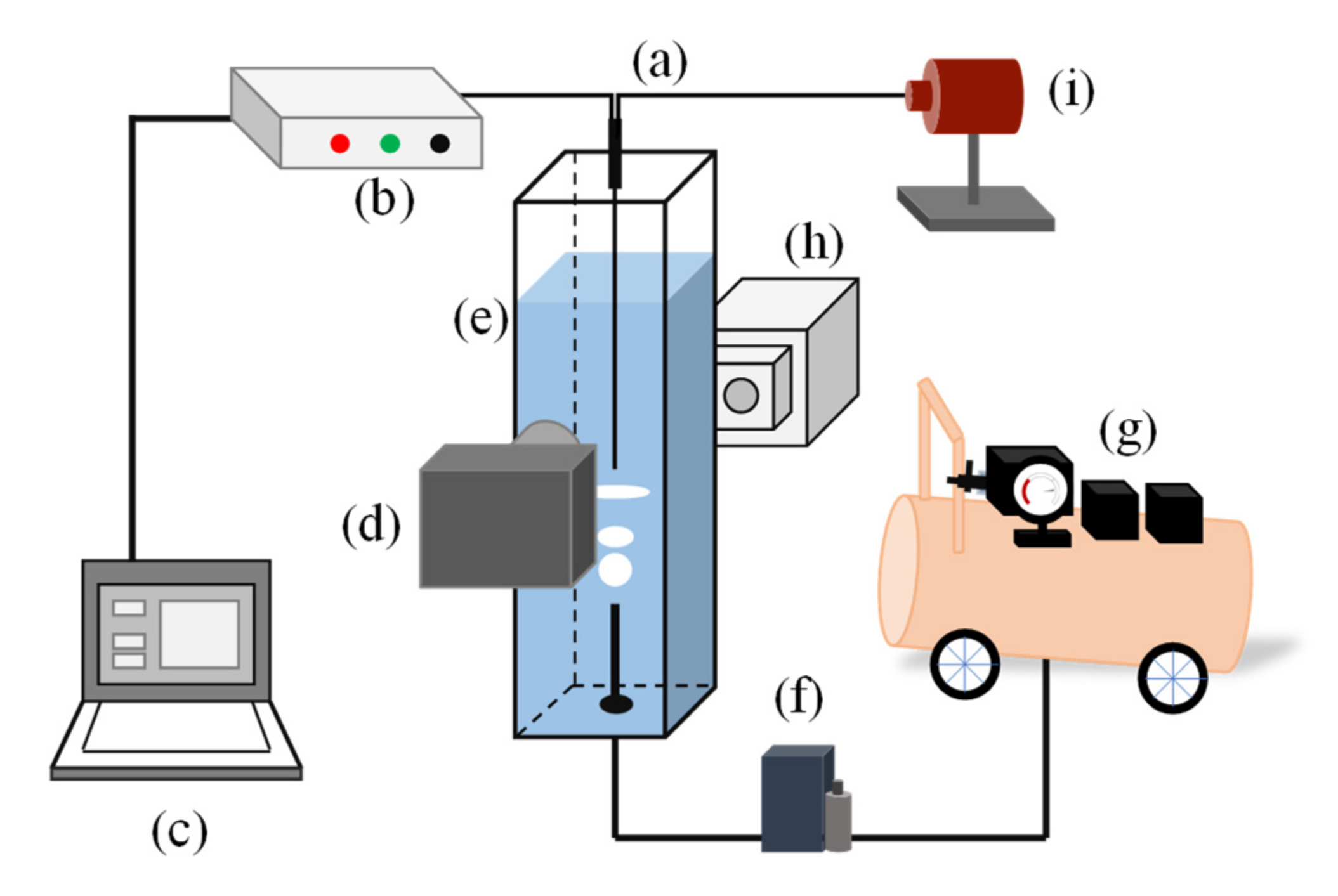
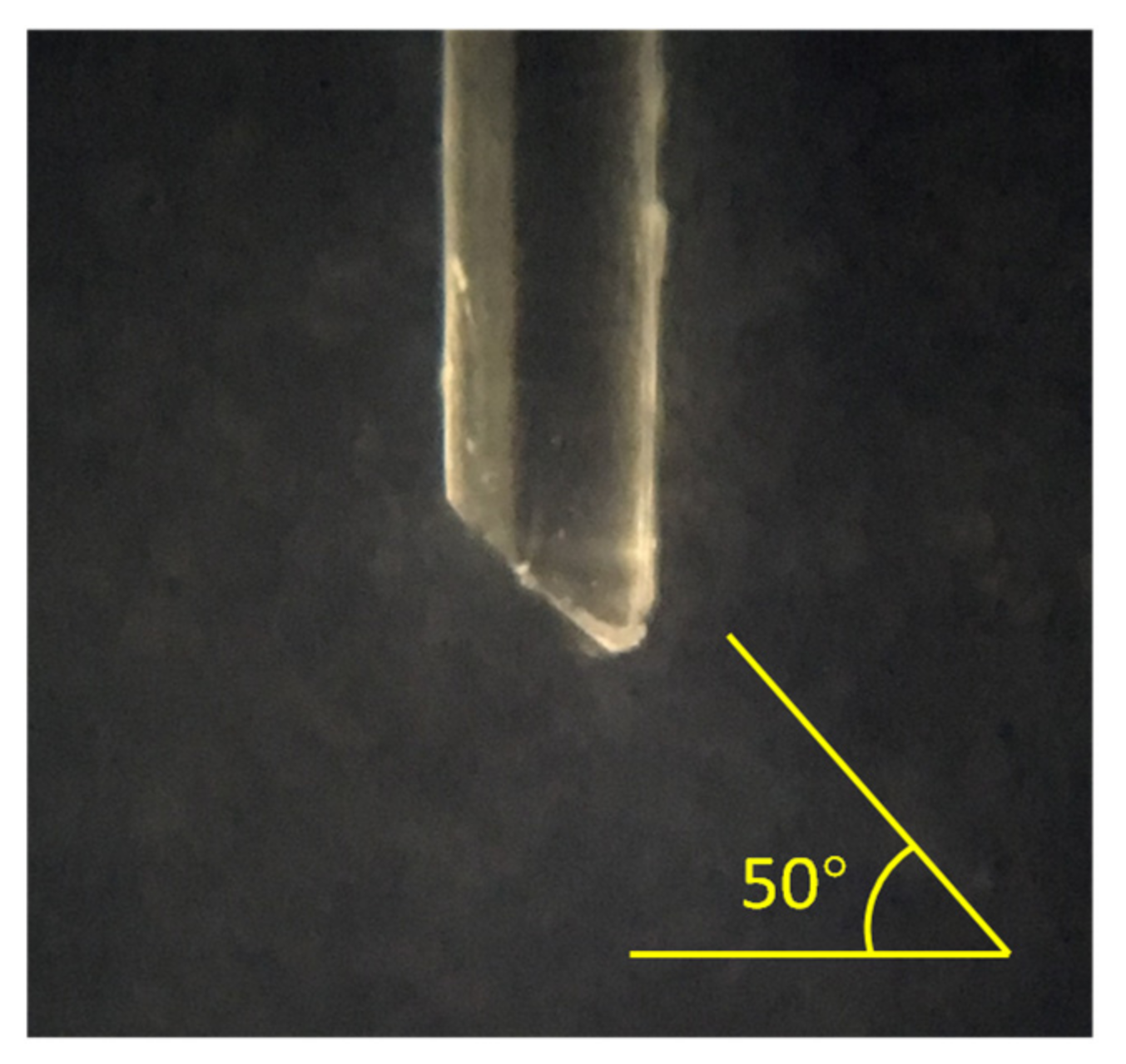
2.1. Fiber Optic Measurement System
2.2. Ray-Tracing Simulation Method
3. Results
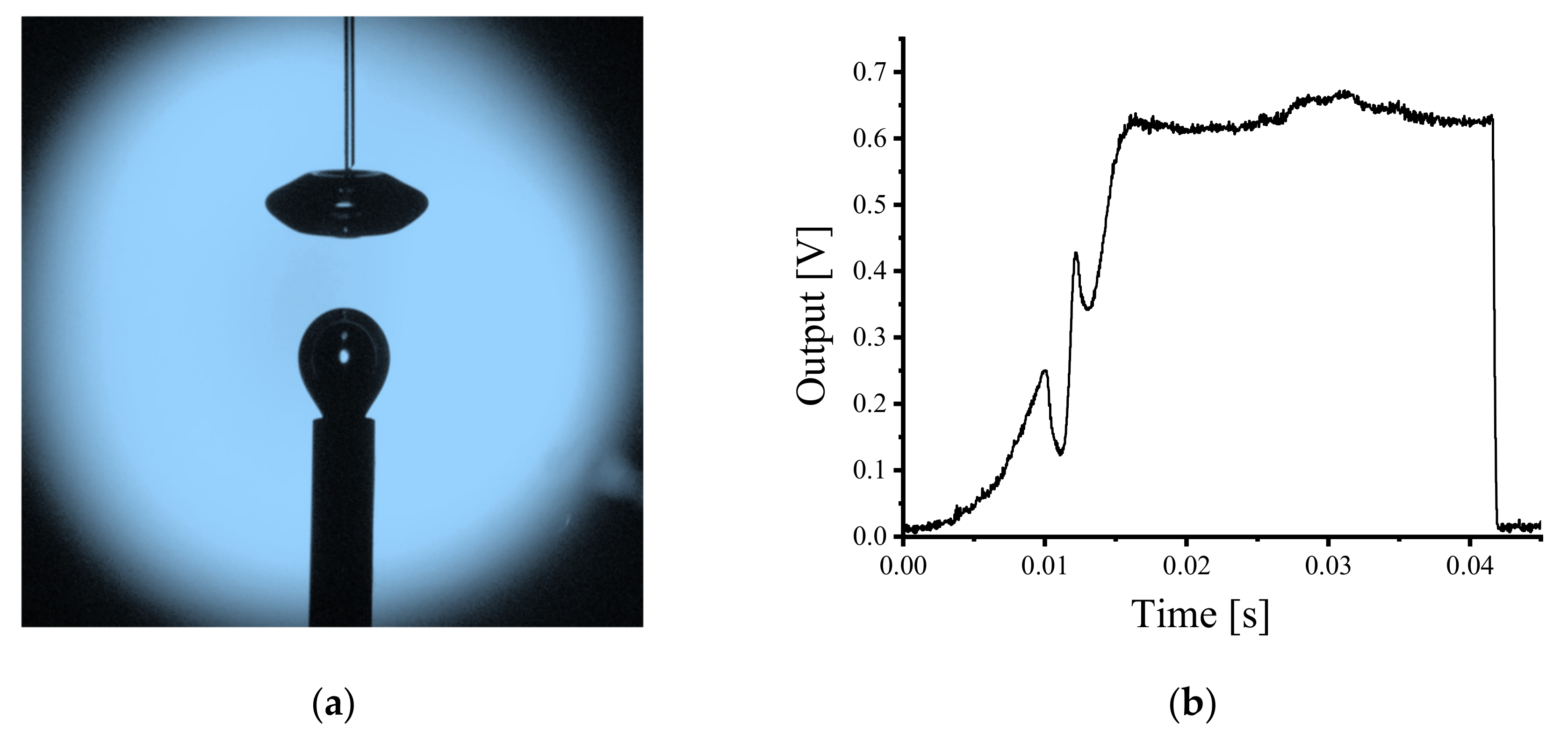
3.1. Experimental Results
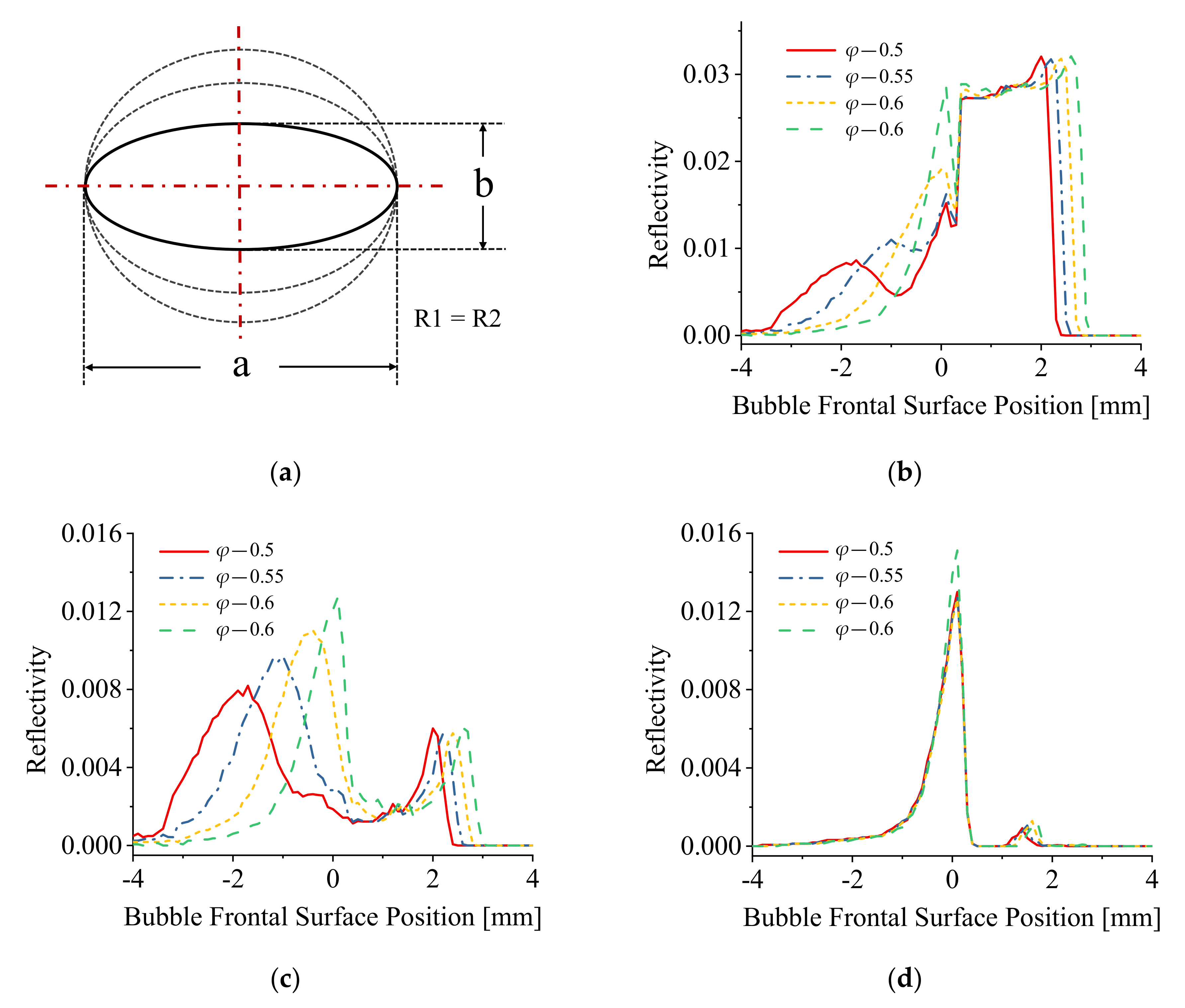
3.2. Simulation Piercing Processes for Different Bubble Shapes
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rust, A.C.; Manga, M. Bubble shapes and orientations in low Re simple shear flow. J. Colloid Interface Sci. 2002, 249, 476–480. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Liang, B.; Ni, J. Numerical Study of Bubble Rising Motion in a Vertical Wedge-Shaped Channel Based on a Modified Level Set Method. Fluid Dyn. 2020, 55, 241–251. [Google Scholar] [CrossRef]
- Besagni, G.; Inzoli, F. The effect of liquid phase properties on bubble column fluid dynamics: Gas holdup, flow regime transition, bubble size distributions and shapes, interfacial areas and foaming phenomena. Chem. Eng. Sci. 2017, 170, 270–296. [Google Scholar] [CrossRef]
- Sharaf, D.M.; Premlata, A.R.; Tripathi, M.K.; Karri, B.; Sahu, K.C. Shapes and paths of an air bubble rising in quiescent liquids. Phys. Fluids 2017, 29, 122104. [Google Scholar] [CrossRef] [Green Version]
- Ramezani, M.; Haghighat, A.; Legg, M.J.; Vigil, R.D.; Olsen, M.G. Evolution of bubble size distribution, number density, and shape in semi-batch vertical gas–liquid Taylor vortex flow. Am. Inst. Chem. Eng. 2020, 66, 17003. [Google Scholar] [CrossRef]
- Besagni, G.; Brazzale, P.; Fiocca, A.; Inzoli, F. Estimation of bubble size distributions and shapes in two-phase bubble column using image analysis and optical probes. Flow Meas. Instrum. 2016, 52, 190–207. [Google Scholar] [CrossRef]
- Miller, N.; Mitchie, R.E. Measurement of local voidage in liquid/gas two-phase flow systems. J. Br. Nucl. Energy Soc. 1970, 2, 94–100. [Google Scholar]
- Fordham, E.J.; Simonian, S.; Ramos, R.T.; Holmes, A.; Huang, S.M.; Lenn, C.P. Multi-phase-fluid discrimination with local fibre optical probes: II. Gas/liquid flows. Meas. Sci. Technol. 1999, 10, 1338–1346. [Google Scholar] [CrossRef]
- Xue, J.; Al-Dahhan, M.; Dudukovic, M.P.; Mudde, R.F. Bubble Dynamics Measurements Using Four-Point Optical Probe. Can. J. Chem. Eng. 2003, 81, 375–381. [Google Scholar] [CrossRef]
- Juliá, J.E.; Harteveld, W.K.; Mudde, R.F.; van den Akker, H.E.A. On the accuracy of the void fraction measurements using optical probes. Rev. Sci. Instrum. 2005, 76, 035103. [Google Scholar] [CrossRef] [Green Version]
- Pjontek, D.; Parisien, V.; Macchi, A. Bubble characteristics measured using a monofibre optical probe in a bubble column and freeboard region under high gas holdup conditions. Chem. Eng. Sci. 2014, 111, 153–169. [Google Scholar] [CrossRef]
- Sun, Y.; Gao, Y.; Hou, H.; Jiao, C.; Zhou, Y.; Zhang, M. Study on droplet velocity in a pulsed sieve plate extraction column by four-sensor optical fiber probe. Chem. Eng. Res. Des. 2019, 144, 550–558. [Google Scholar] [CrossRef]
- Yang, Q.Y.; Jin, N.D.; Zhai, L.S.; Wang, D.Y.; Wang, F. Experimental study of slug and churn flows in a vertical pipe using plug-in optical fiber and conductance sensors. Exp. Therm. Fluid Sci. 2019, 107, 16–28. [Google Scholar] [CrossRef]
- Yang, Q.; Jin, N.; Wang, F.; Ren, W. Measurement of Gas Phase Distribution Using Multifiber Optical Probes in a Two-Phase Flow. IEEE Sens. 2020, 20, 6642–6651. [Google Scholar] [CrossRef]
- Clanet, C.; Quéré, D. Onset of menisci. J. Fluid Mech. 2002, 460, 131–149. [Google Scholar] [CrossRef]
- Raufaste, C.; Kirstetter, G.; Celestini, F.; Cox, S.J. Deformation of a free interface pierced by a tilted cylinder. Europhys. Lett. 2012, 99, 24001. [Google Scholar] [CrossRef] [Green Version]
- Raufaste, C.; Cox, S. Deformation of a free interface pierced by a tilted cylinder: Variation of the contact angle. Colloids Surf. A: Physicochem. Eng. Asp. 2013, 438, 126–131. [Google Scholar] [CrossRef] [Green Version]
- Tang, Y.; Cheng, S. The Meniscus on the Outside of a Circular Cylinder: From Microscopic to Macroscopic Scales. J. Colloid Interface Sci. 2019, 533, 401–408. [Google Scholar] [CrossRef] [Green Version]
- Sakamoto, A.; Saito, T. Computational analysis of responses of a wedge-shaped-tip optical fiber probe in bubble measurement. Rev. Sci. Instrum. 2012, 83, 75107. [Google Scholar] [CrossRef] [PubMed]
- Mizushima, Y.; Saito, T. Detection method of a position pierced by a single-tip optical fibre probe in bubble measurement. Meas. Sci. Technol. 2012, 23, 85308. [Google Scholar] [CrossRef]
- Sakamoto, A.; Saito, T. Robust algorithms for quantifying noisy signals of optical fiber probes employed in industrial-scale practical bubbly flows. Int. J. Multiph. Flow 2012, 41, 77–90. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, X.; Zhang, Y.; Li, S.; Sun, W.; Lewis, E. Investigation of the characteristics of a fiber-optic gas-liquid two-phase flow sensor. J. Opt. Soc. Am. A 2020, 37, 1687–1694. [Google Scholar] [CrossRef] [PubMed]
- Terasaka, K.; Hirabayashi, A.; Nishino, T.; Fujioka, S.; Kobayashi, D. Development of microbubble aerator for waste water treatment using aerobic activated sludge. Chem. Eng. Sci. 2011, 66, 3172–3179. [Google Scholar] [CrossRef]
- Gargouri, B.; Karray, F.; Mhiri, N.; Aloui, F.; Sayadi, S. Application of a stirred tank bioreactor (CSTR) for bioremdiation of hydrocarbon-rich industrial wastewater effluents. J. Hazard. Mater. 2011, 189, 427–434. [Google Scholar] [CrossRef] [PubMed]
- Amani, P.; Esmaieli, M. Drop behaviour characteristics in different operating regimes in an L-shaped pulsed sieve-plate column. Can. J. Chem. Eng. 2017, 96, 285–296. [Google Scholar] [CrossRef] [Green Version]
- Davenport, J.J.; Hickey, M.; Phillips, J.P.; Kyriacou, P.A. Method for producing angled optical fiber tips in the laboratory. Opt. Eng. 2016, 55, 026120. [Google Scholar] [CrossRef]
- Yuan, L.; Shou, S.; Qiu, A.; Lu, Z. Compensation mechanism of an optical fiber turning reflective sensor. In Proceedings of the International Conference on Optical Fibre Sensors, Wuhan, China, 1 August 1991; pp. 117–122. [Google Scholar]
- Culshaw, B.; Dakin, J.P. Optical Fiber Sensors: Systems and Applications; Artech House: Boston, FL, USA, 1989; Volume 2, pp. 435–455. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Zhang, Y.; Li, S.; Sun, W.; Lewis, E. Influence of Bubble Deformation on the Signal Characteristics Generated Using an Optical Fiber Gas–liquid Two-Phase Flow Sensor. Sensors 2021, 21, 7338. https://doi.org/10.3390/s21217338
Ma Y, Zhang Y, Li S, Sun W, Lewis E. Influence of Bubble Deformation on the Signal Characteristics Generated Using an Optical Fiber Gas–liquid Two-Phase Flow Sensor. Sensors. 2021; 21(21):7338. https://doi.org/10.3390/s21217338
Chicago/Turabian StyleMa, Yu, Yangrui Zhang, Song Li, Weimin Sun, and Elfed Lewis. 2021. "Influence of Bubble Deformation on the Signal Characteristics Generated Using an Optical Fiber Gas–liquid Two-Phase Flow Sensor" Sensors 21, no. 21: 7338. https://doi.org/10.3390/s21217338
APA StyleMa, Y., Zhang, Y., Li, S., Sun, W., & Lewis, E. (2021). Influence of Bubble Deformation on the Signal Characteristics Generated Using an Optical Fiber Gas–liquid Two-Phase Flow Sensor. Sensors, 21(21), 7338. https://doi.org/10.3390/s21217338