
The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication



Abstract
:
1. Introduction
- Transport is an extremely important branch in the development of industries and represents a sphere of CO2 emissions in the European Union and over 40% of the final energy consumption [8];
- Fuel consumption and pollution increase in direct proportion to a high percentage of congestion [9];
- According to official reports from the Global Burden of Disease (GBD) before the outbreak of the COVID-19 pandemic, they reported that by 2020, road accidents were the second leading cause of loss of human and economic lives worldwide, and 90% of accidents are caused by human error [14].
1.1. Analysis of Communications Depending on the Standard
- ETSI TC ITS;
- CEN/TC 278;
- ISO/TC 204; and
- IEEE 802.11 and 1609 WG.
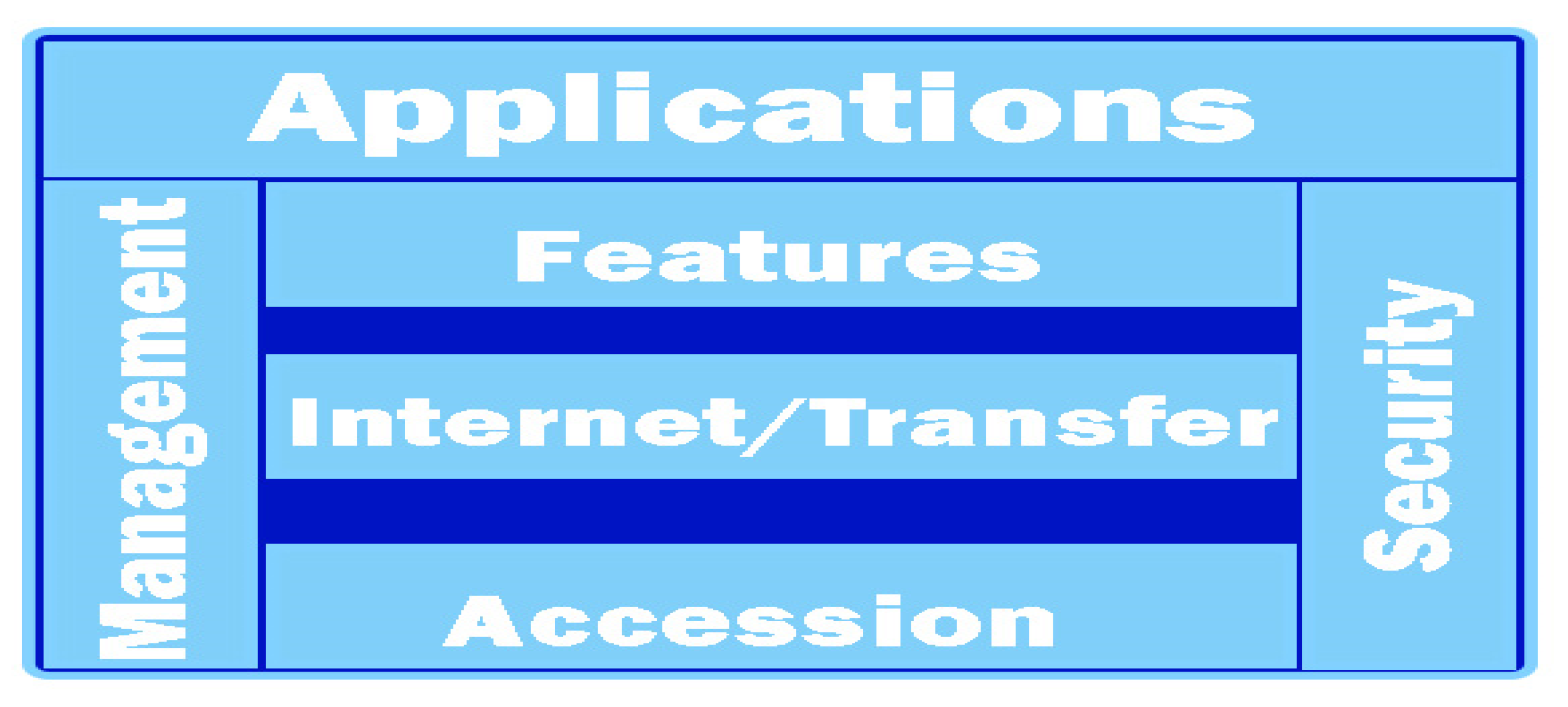
1.2. Development of Communication Protocols—References on Architecture
- Accessibility to OSI layers one and two (thereby maintaining the physical and data connection);
- Communication and transport represented by OSI layers 3 and 4 (communication and transport layer); and
- The benefits are represented by OSI layers five, six, and seven (upper layer, identified by representation and application).
1.3. Approaching LTE and 802.11p Standards
2. Materials and Methods
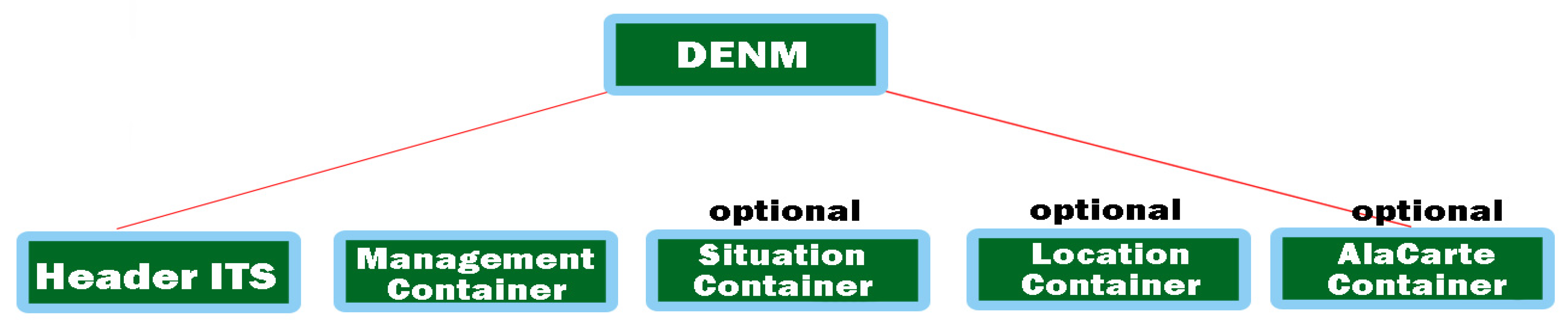
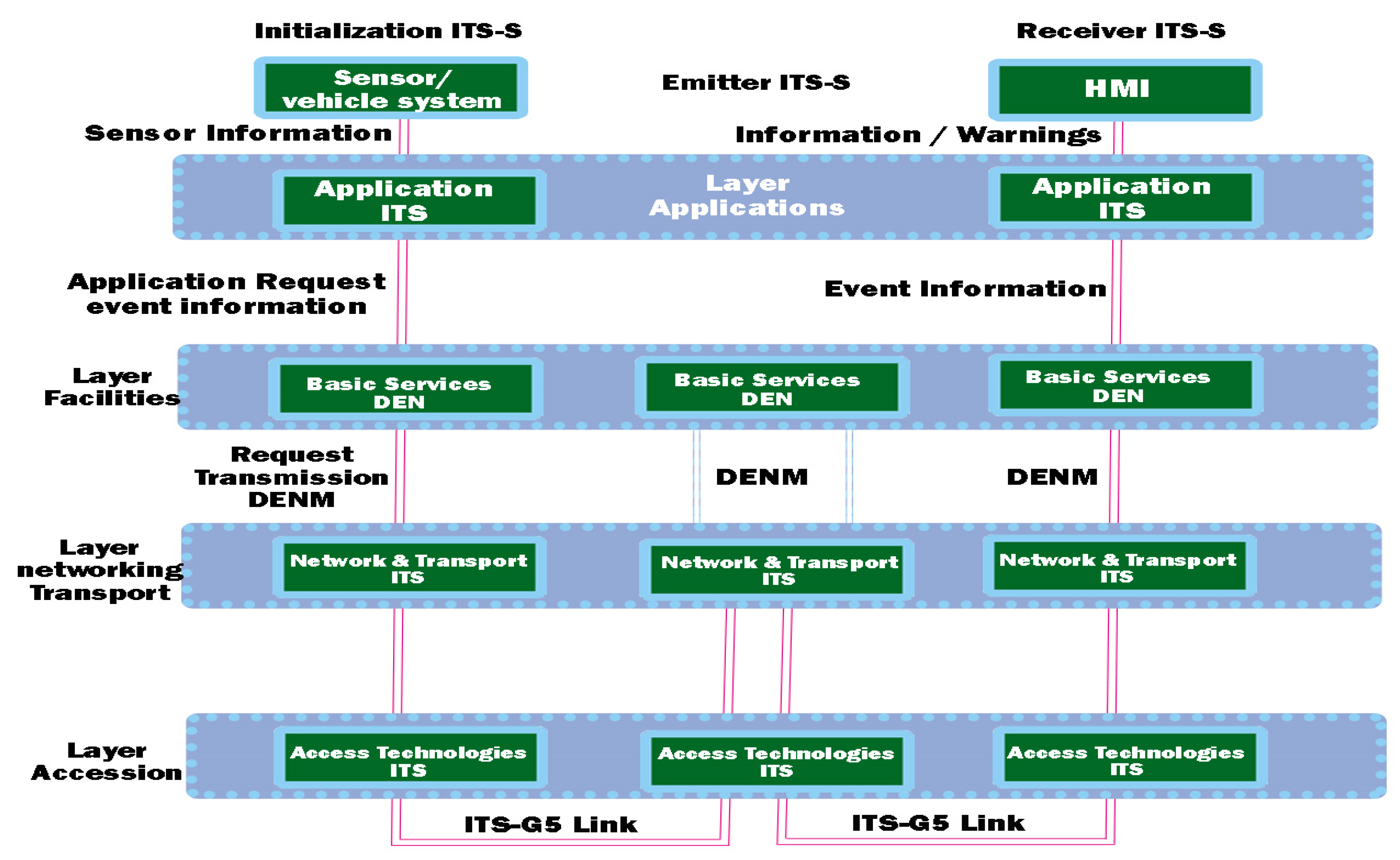
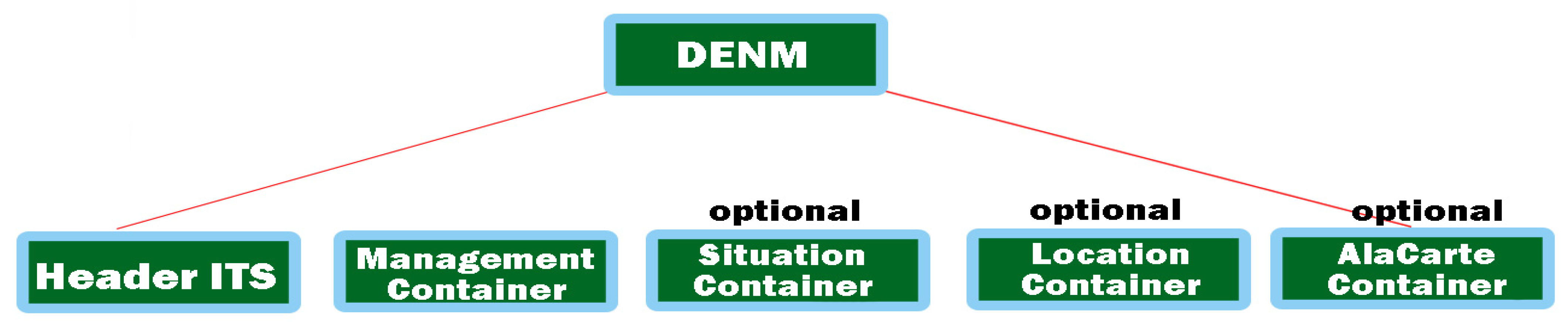
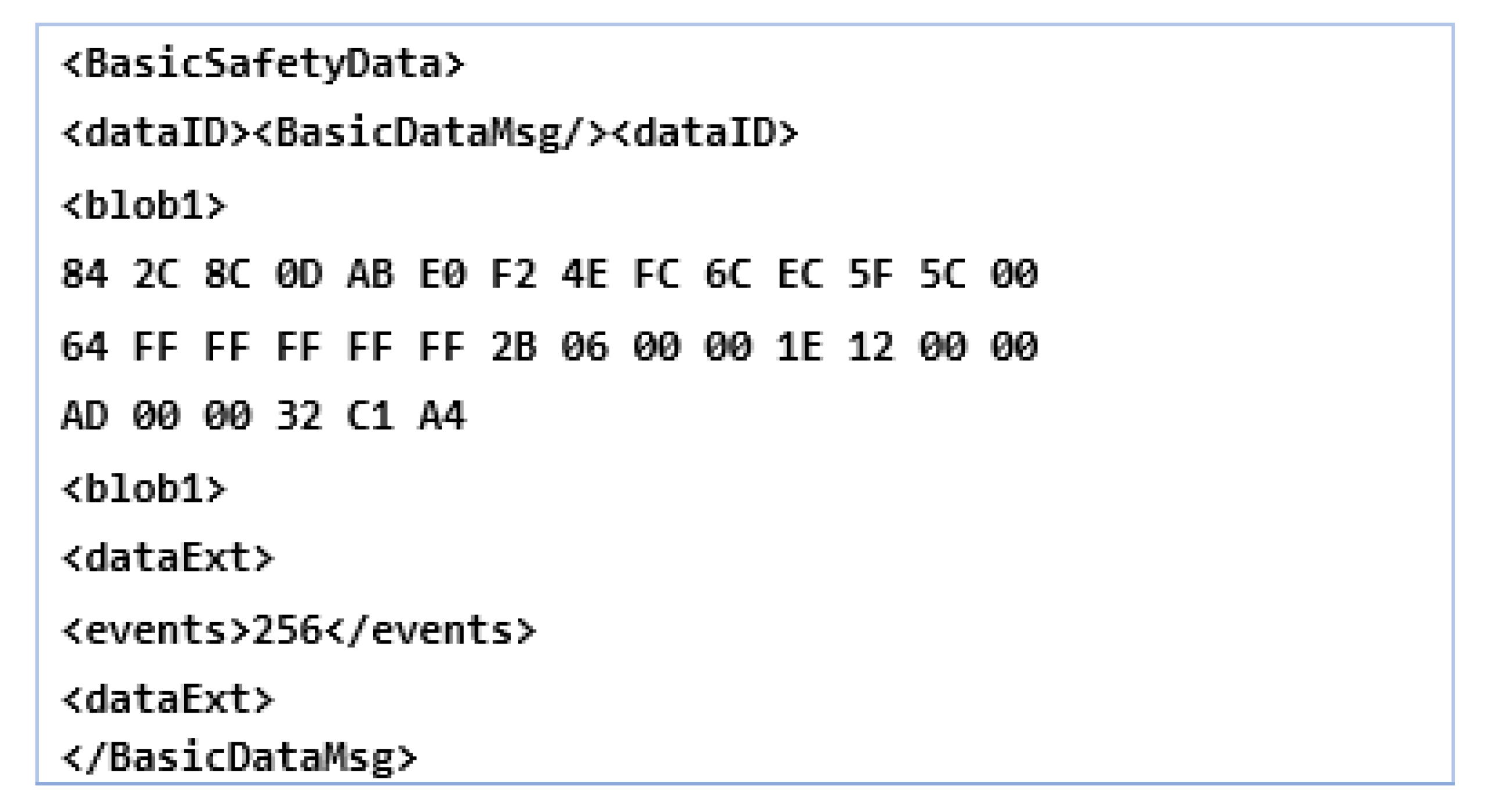
2.1. Contribution of Decentralized Environment Notification Messages (DENMs)
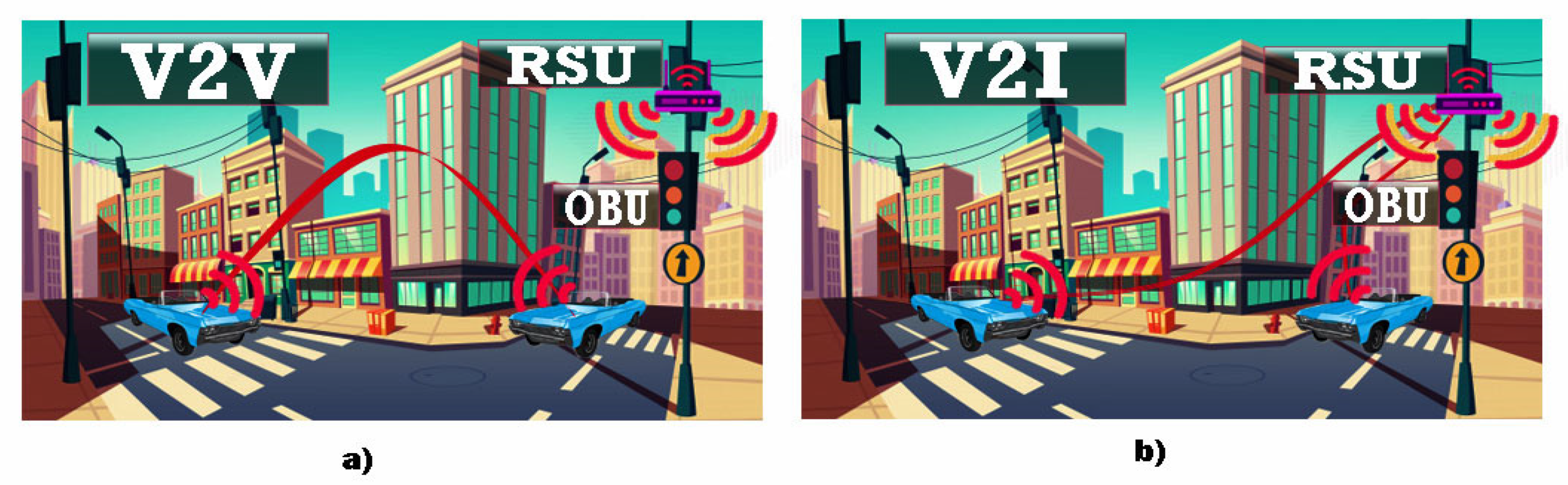
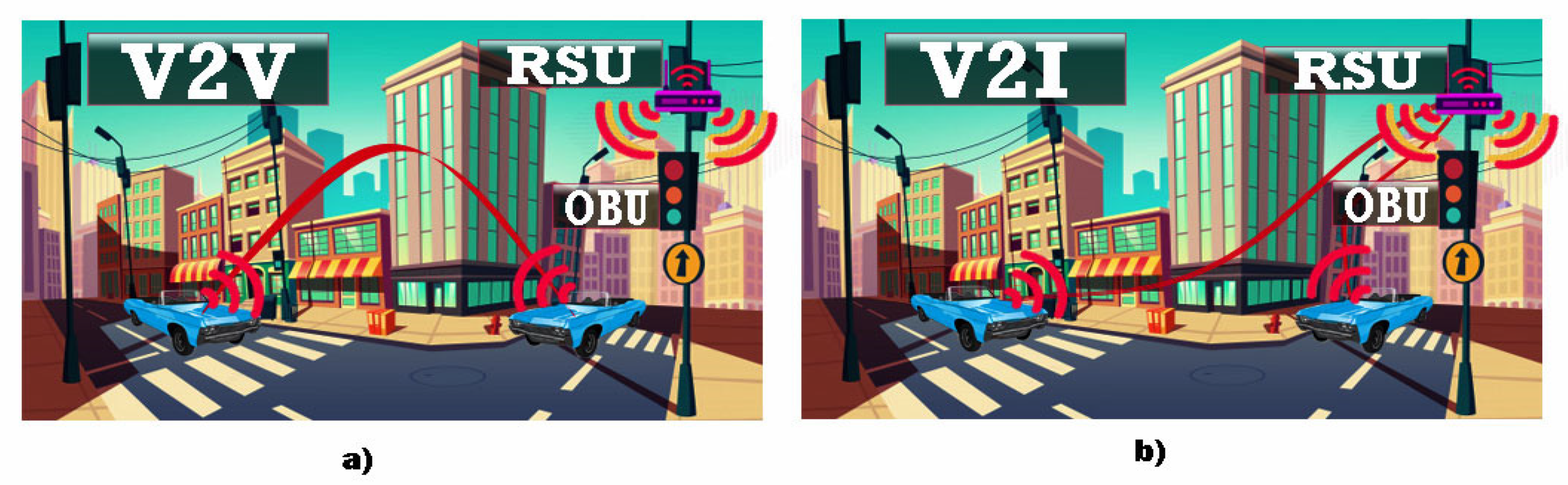
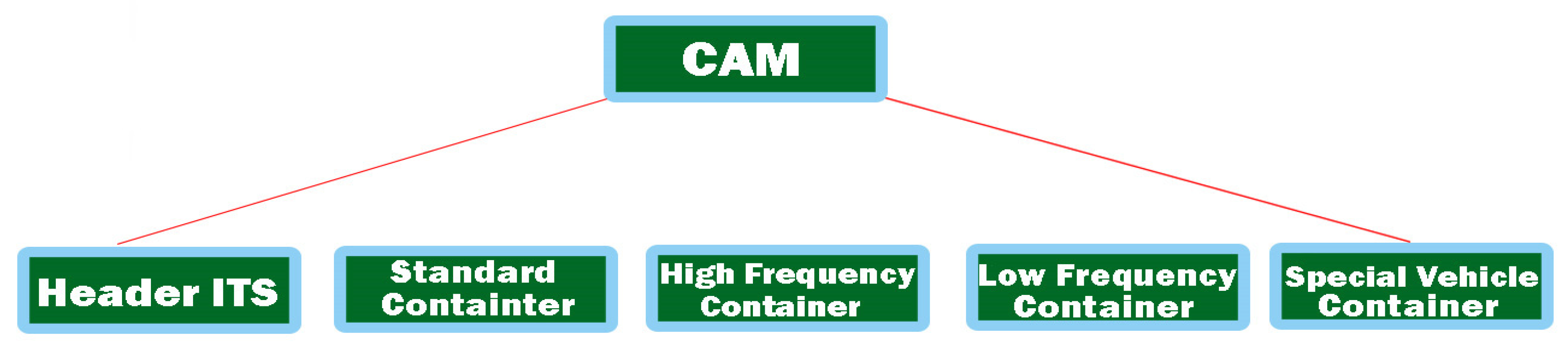
2.2. Cooperative Communication Elements in the Vehicle
3. Experimental Evaluation Simulation and Results
- ○
- Single-channel mode (one or two antennas for different operations);
- ○
- Dual-channel module (one antenna for each channel), two independent on IEEE 802.11 p and operable on different radio channels;
- ○
- 10 MHz (DSRC) broadband channel mode;
- ○
- Transmission via IEEE 802.11p Class C network mask (5 GHz band);
- ○
- IEEE 802.11p improving the performance of the adjacent channel;
- ○
- Cyclic transmission of the antenna delay (two operations in the 5.9 GHz band for each antenna);
- ○
- Power control transmission (0.5 dB steps); and
- ○
- Rapid changes in the way synchronized systems are communicated.
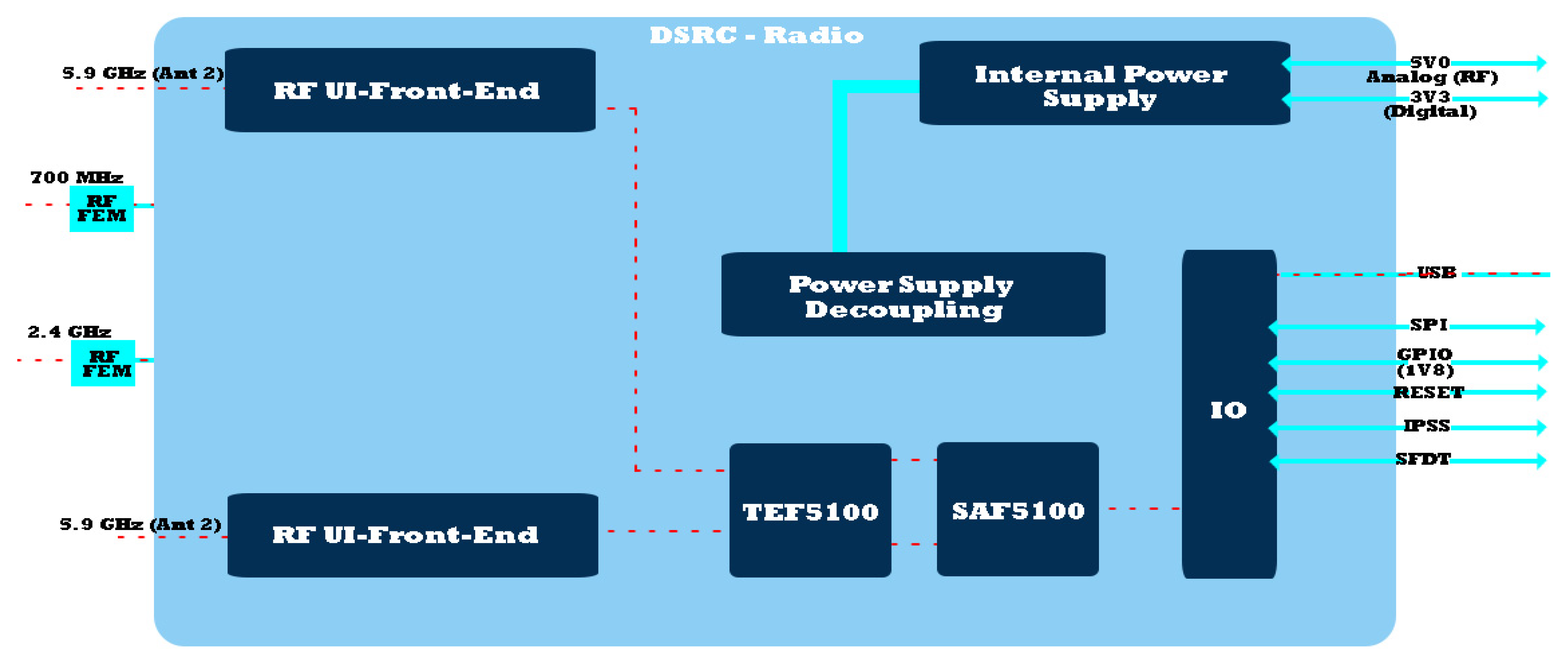
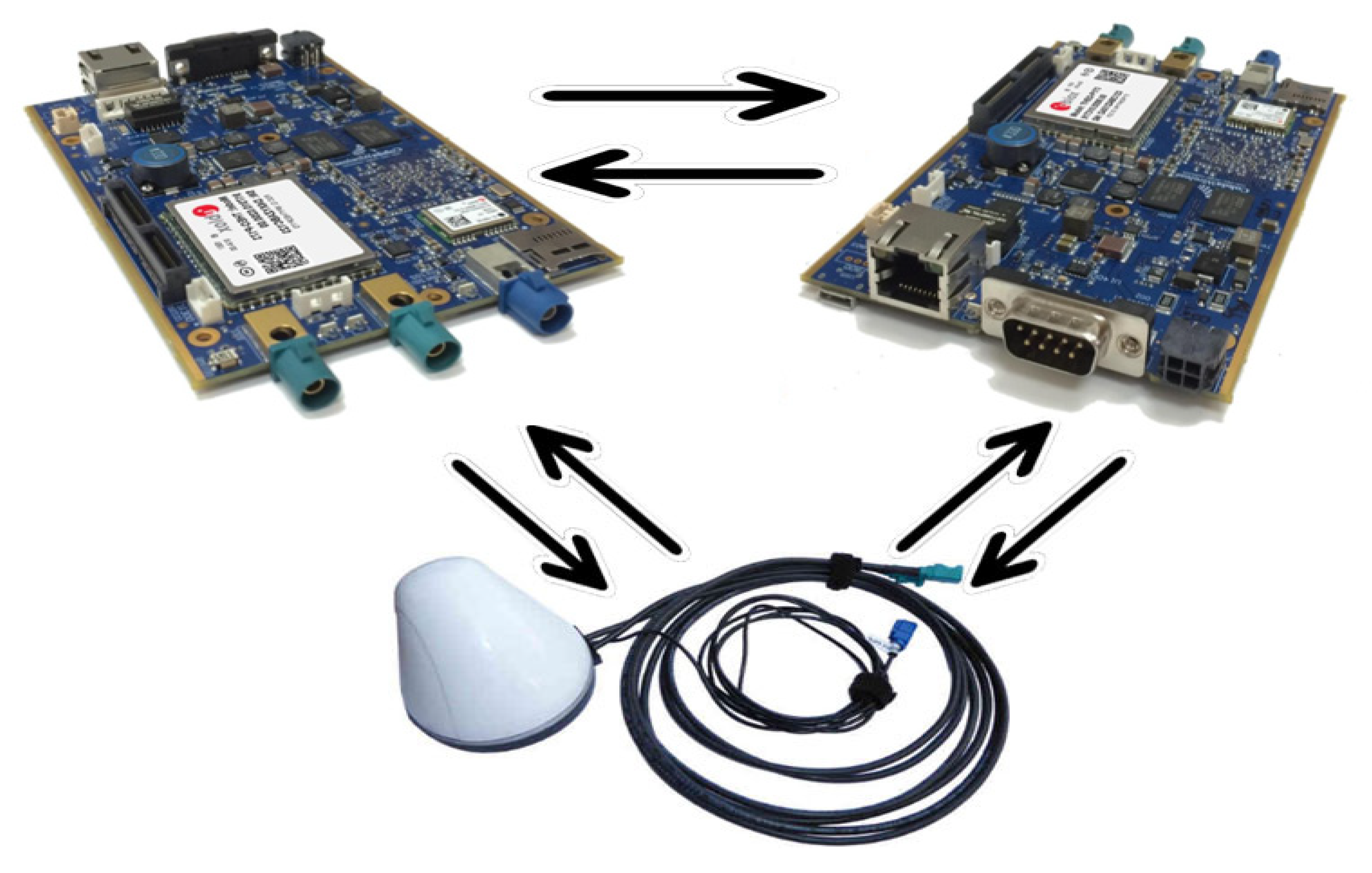
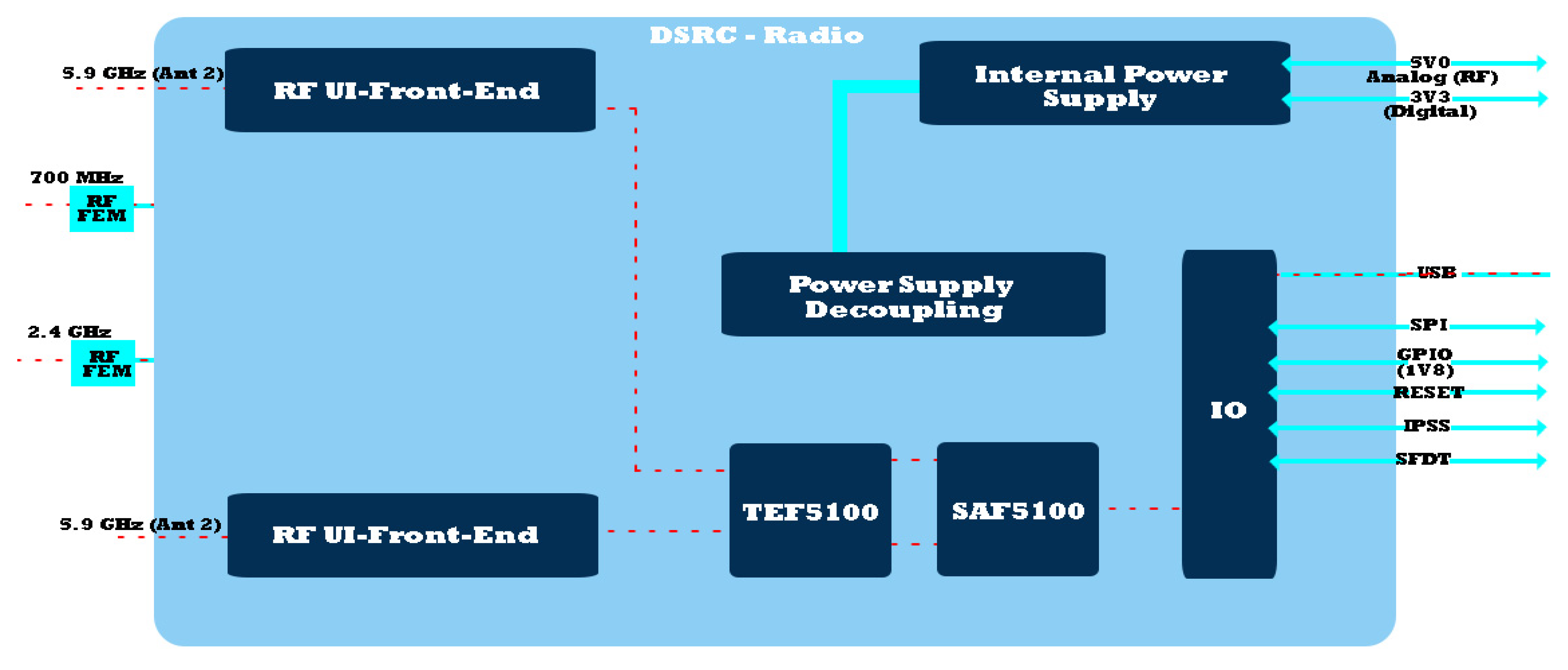
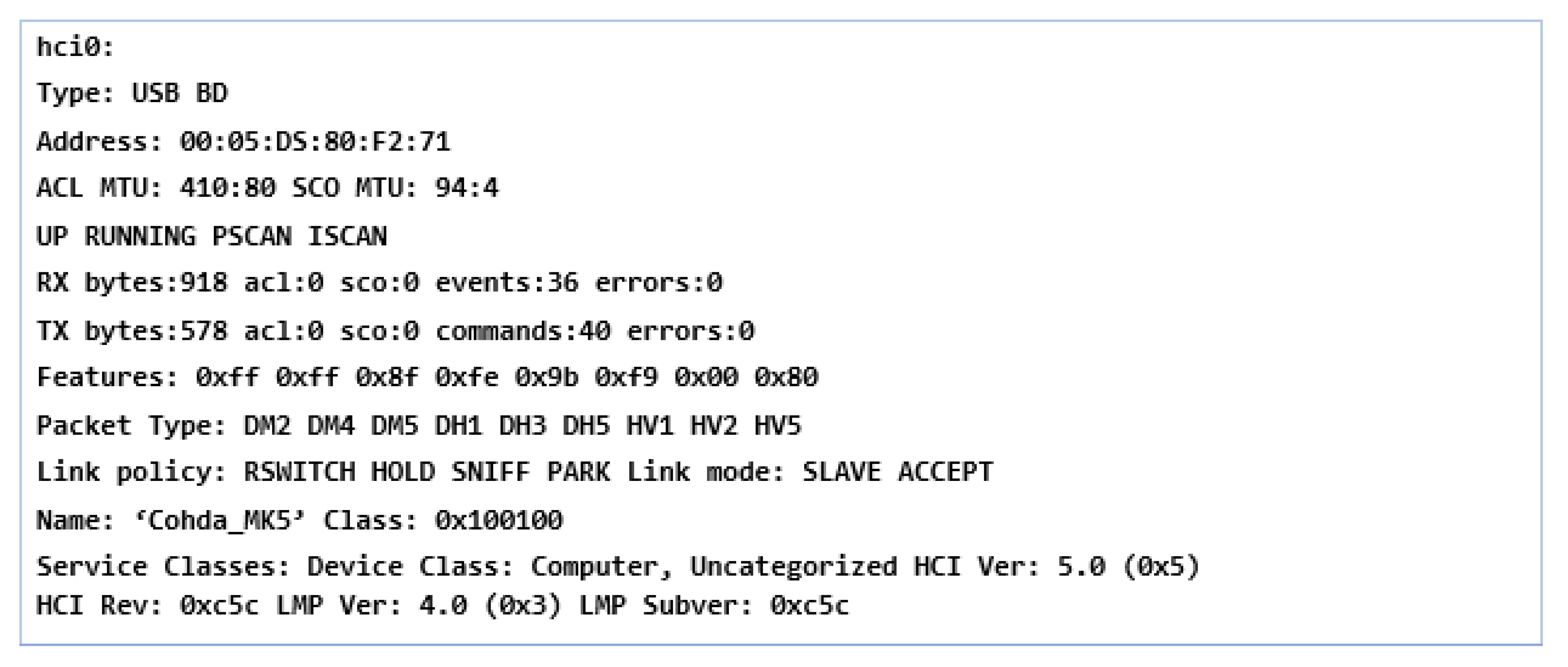
3.1. Analysis of the V2X System According to the Manufacturer
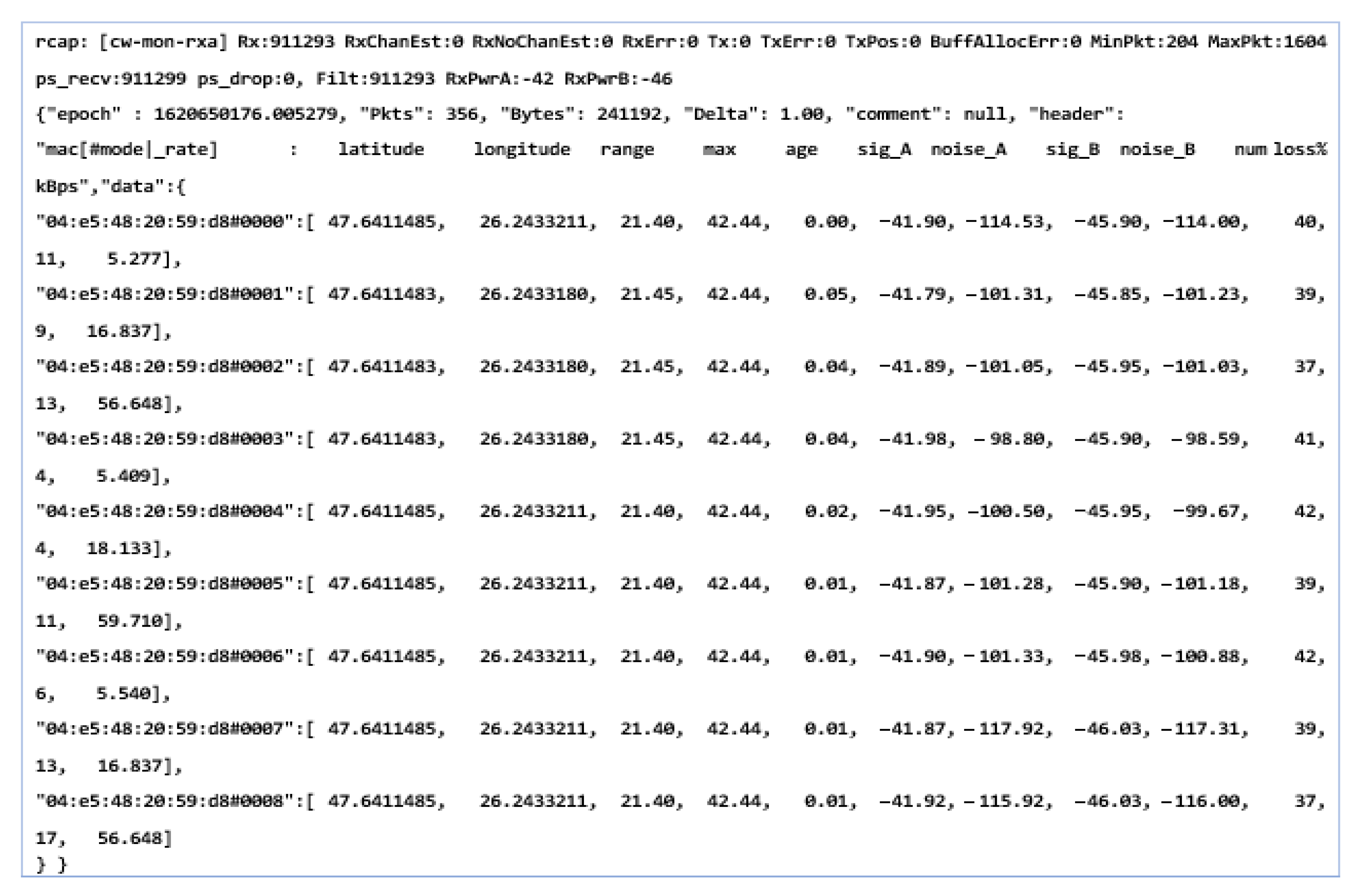
3.2. Evaluation of V2X System Performance
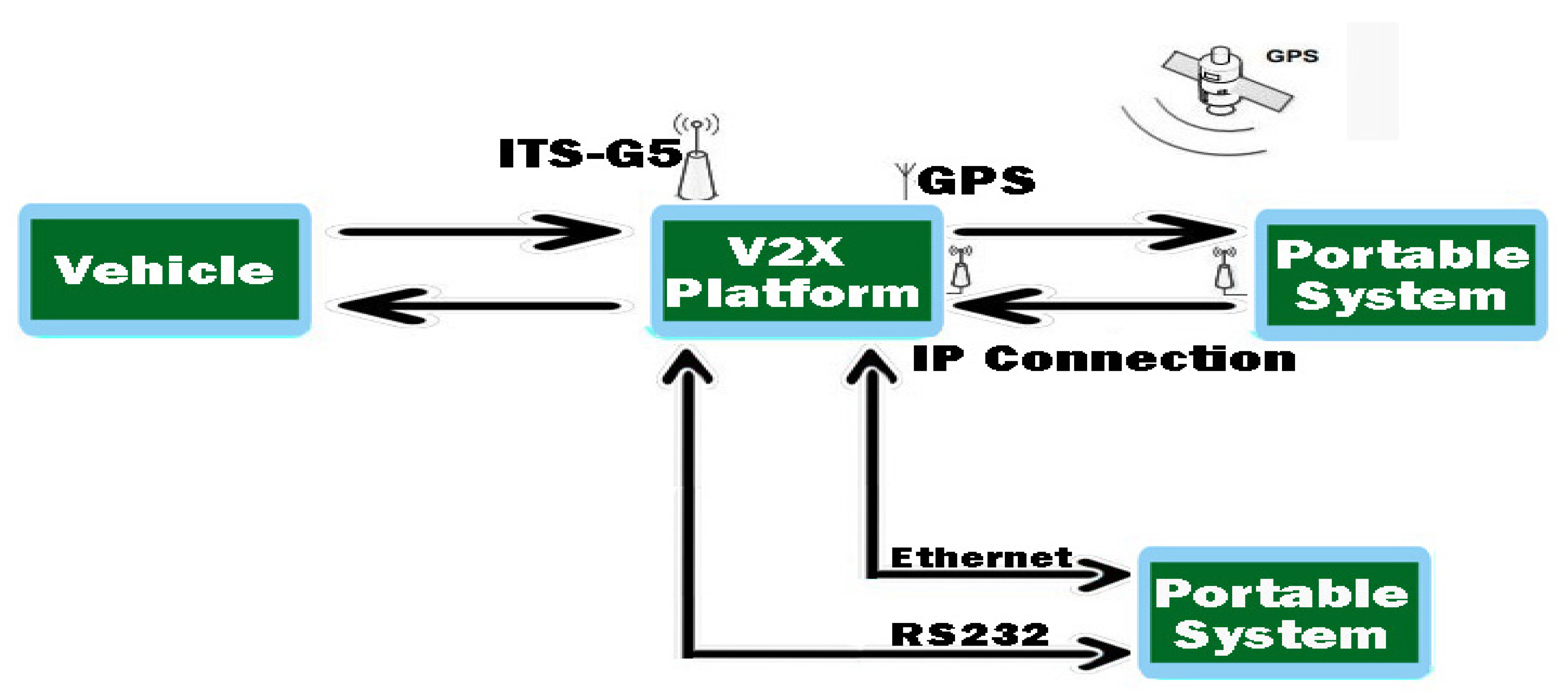
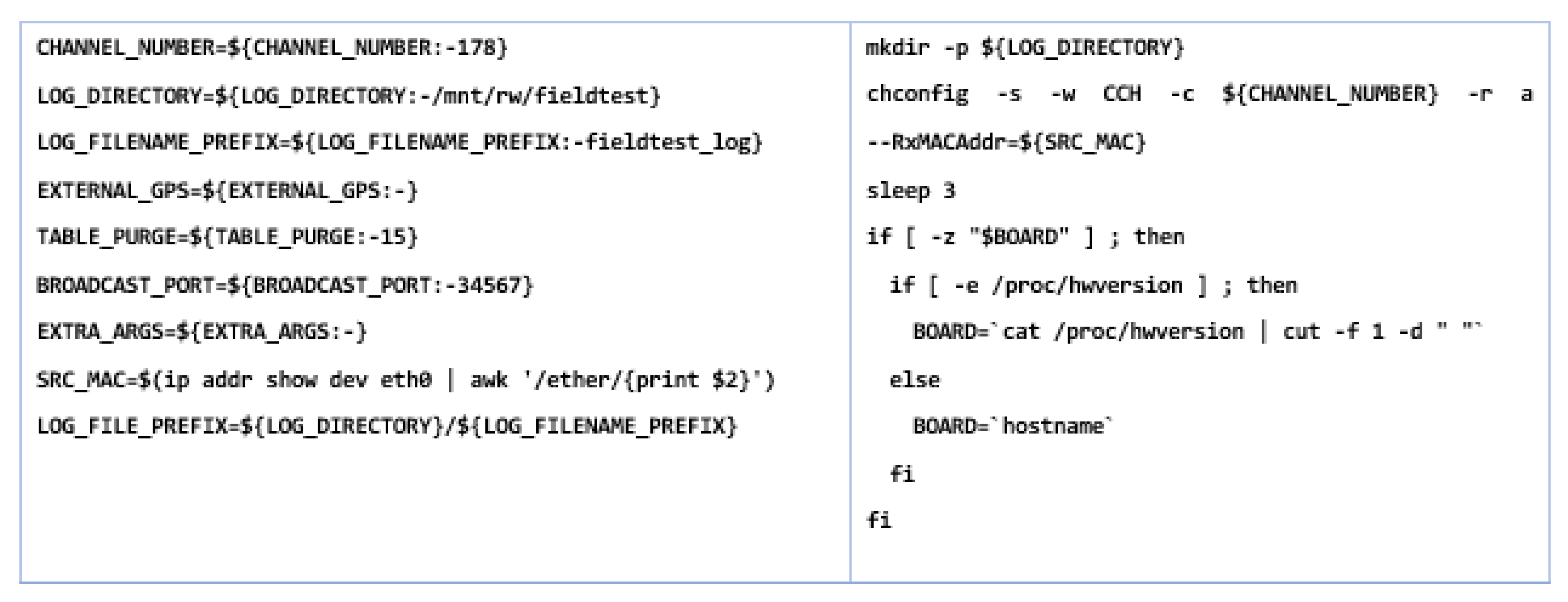
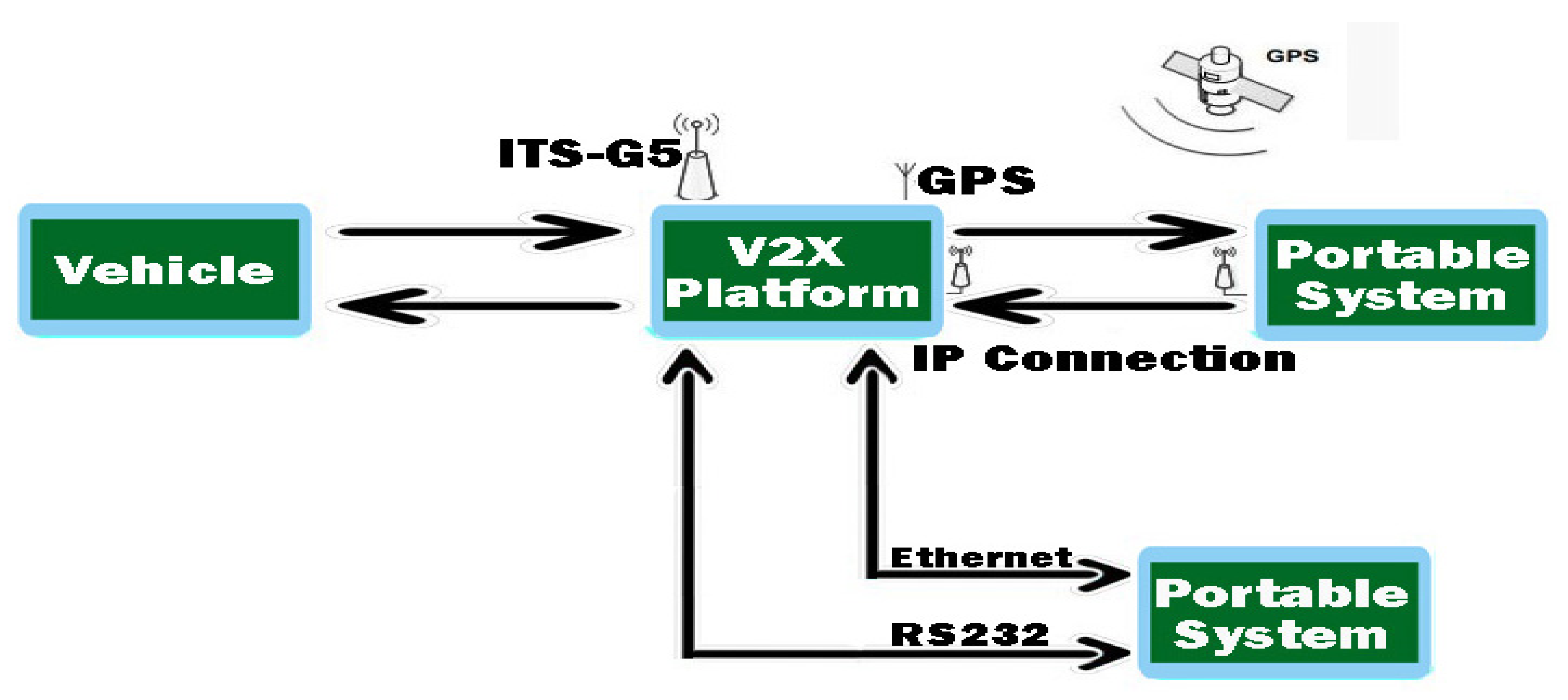
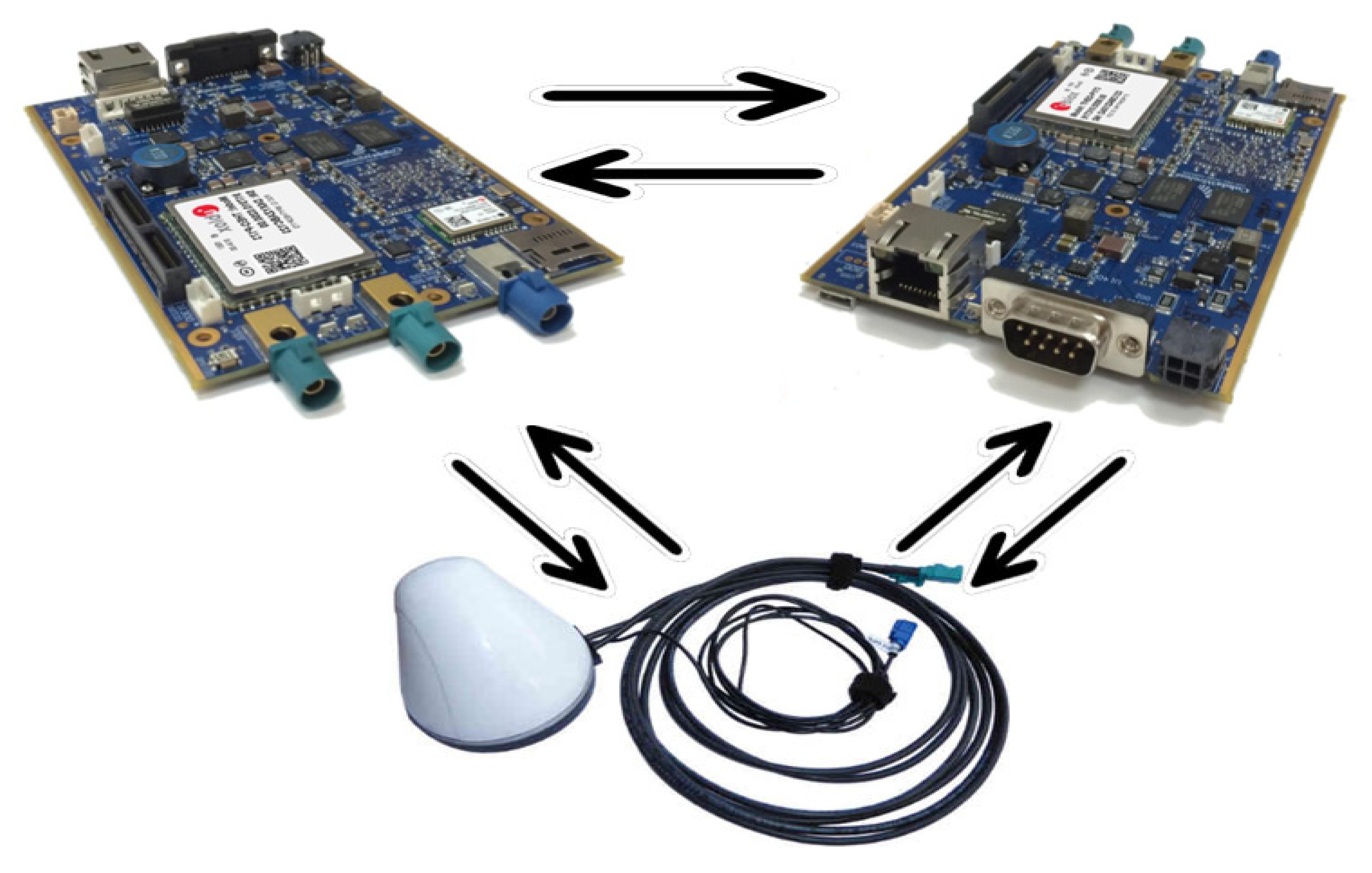
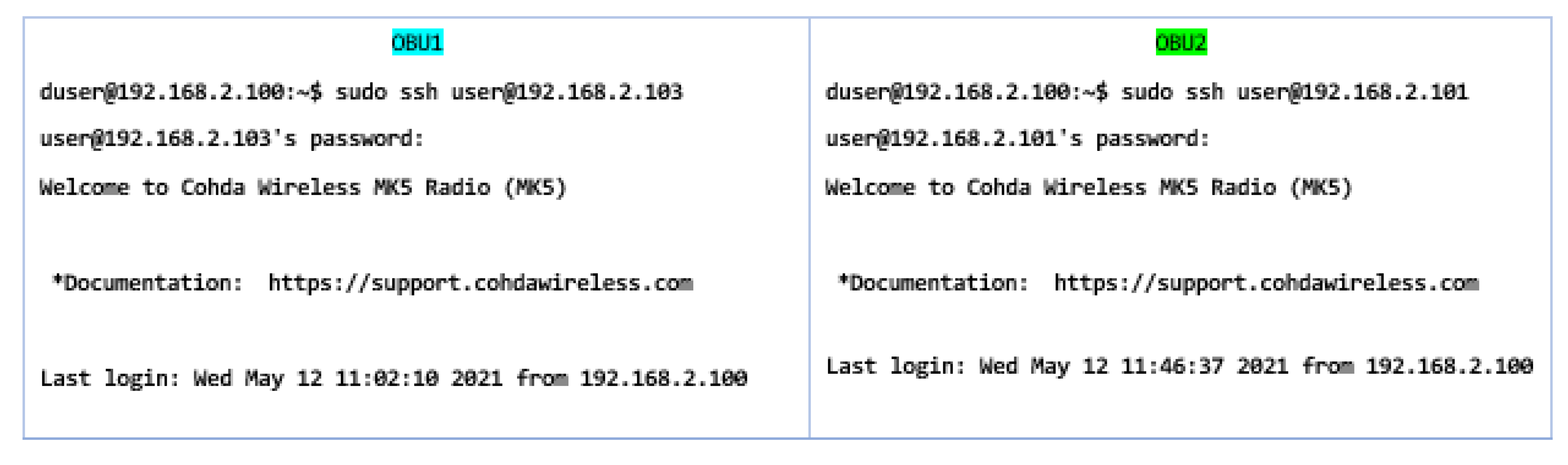
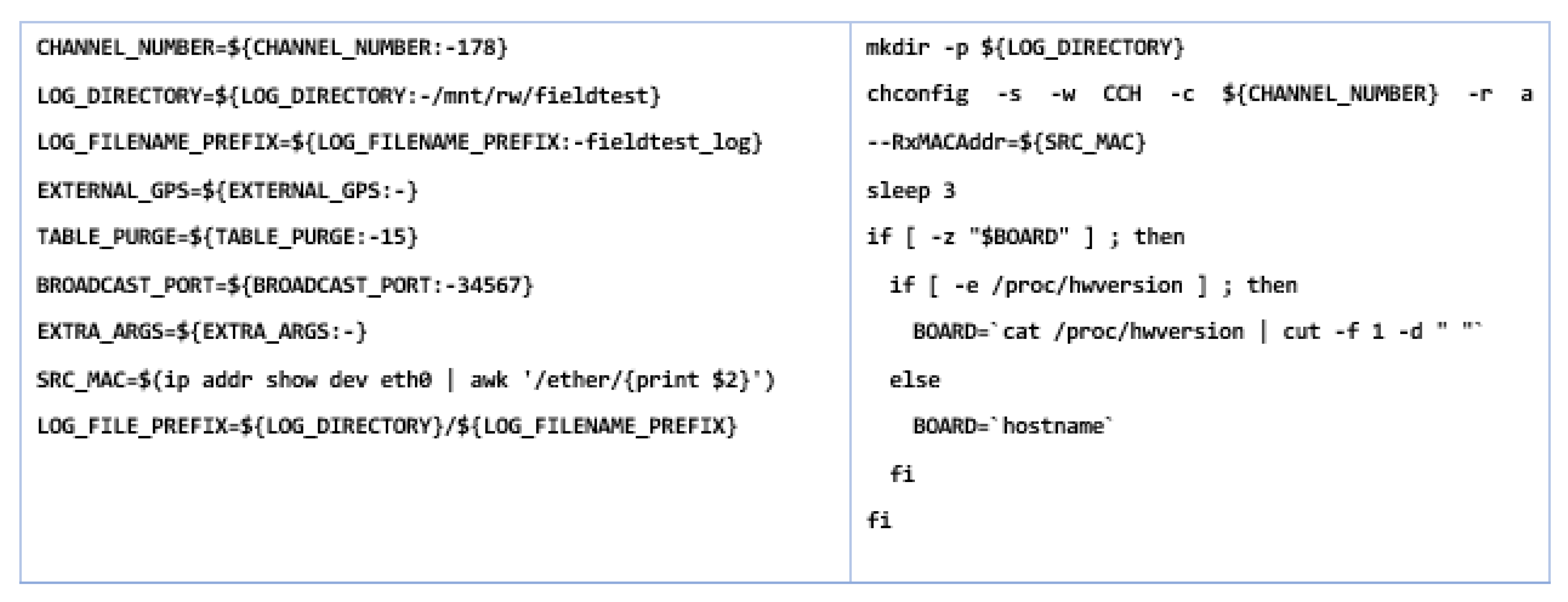
3.3. Configuring V2X and V2V Architecture in Experimental Scenarios
3.4. Test Scenarios in an Indoor Controlled Environment
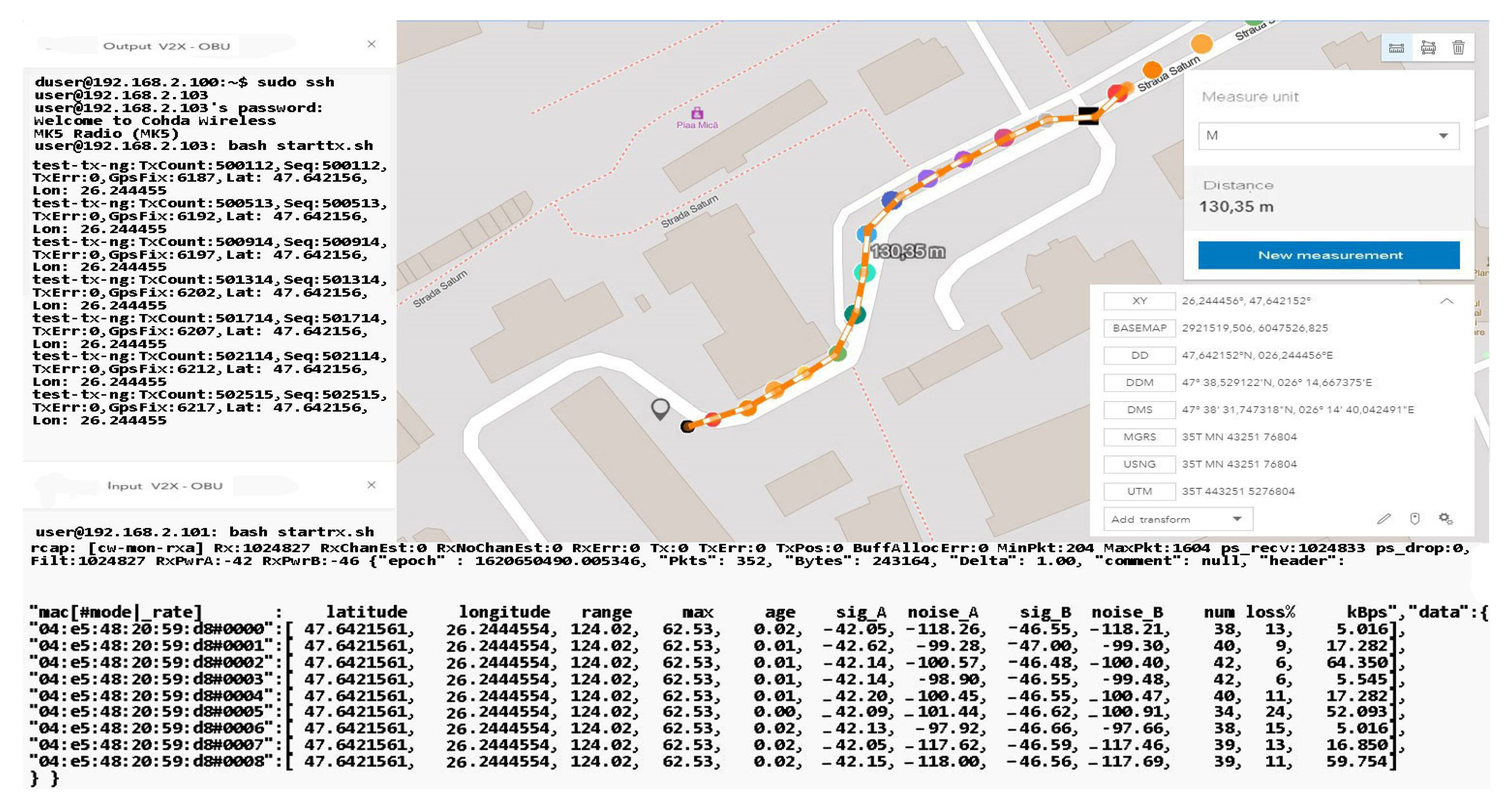
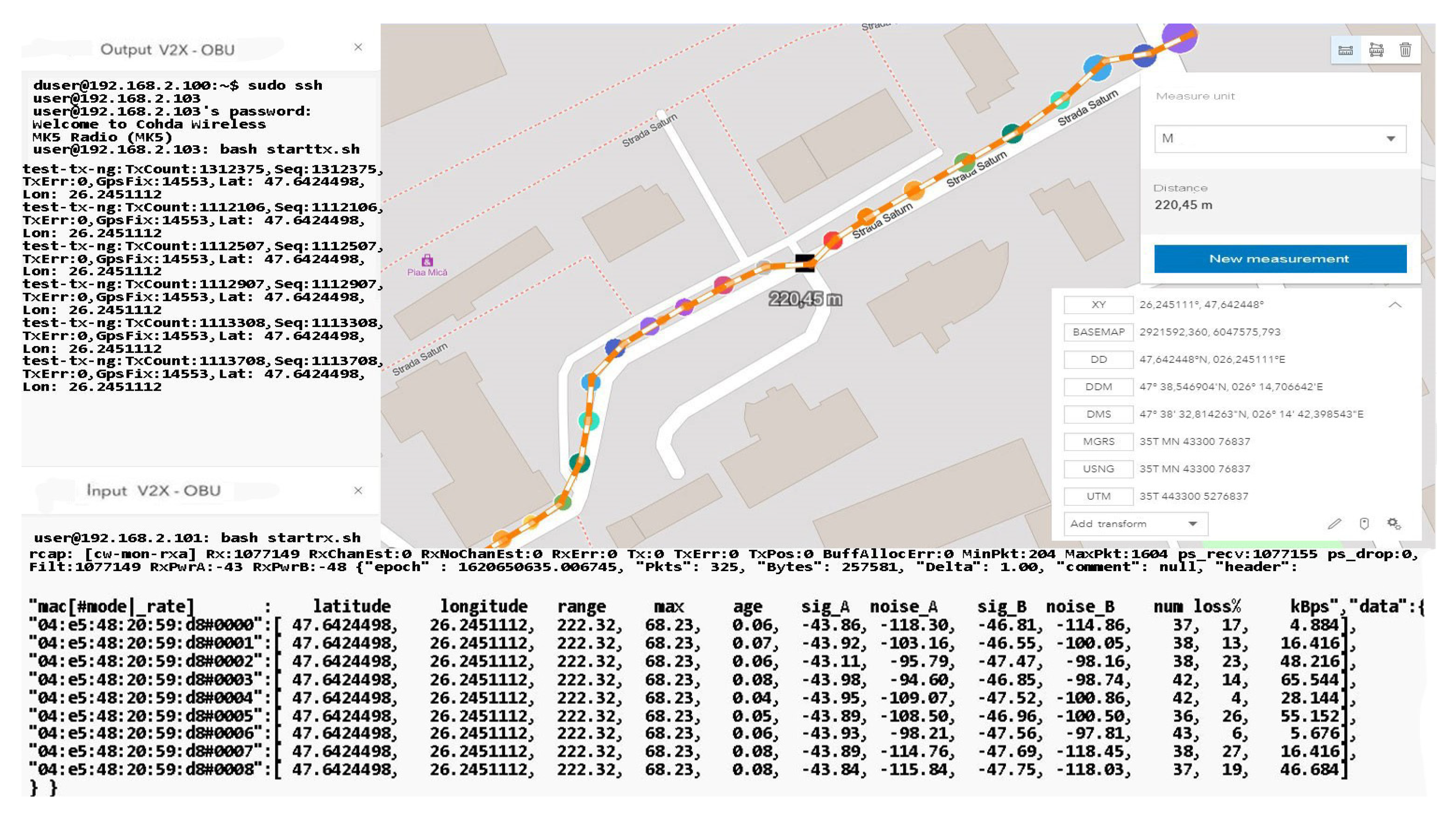
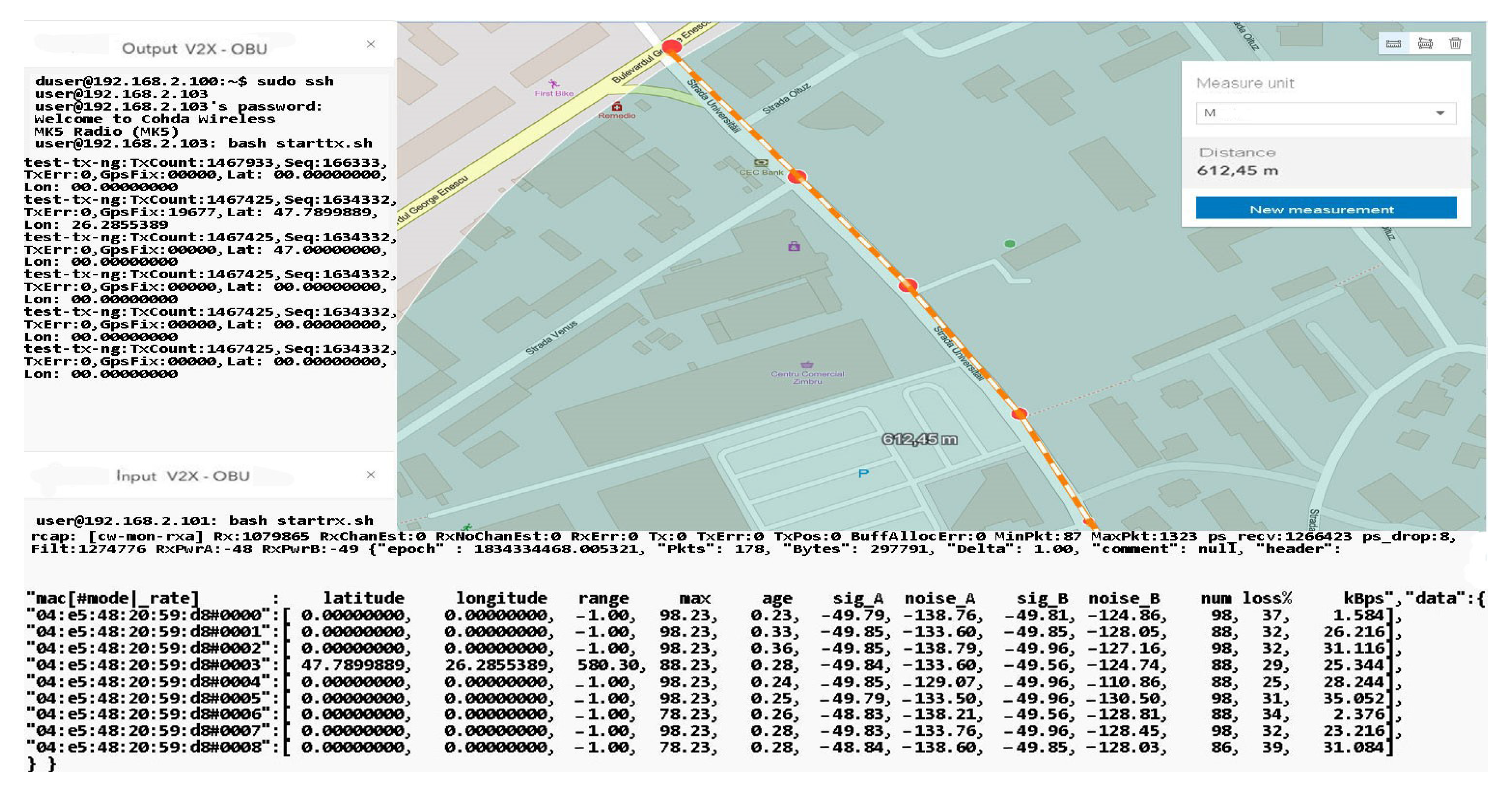
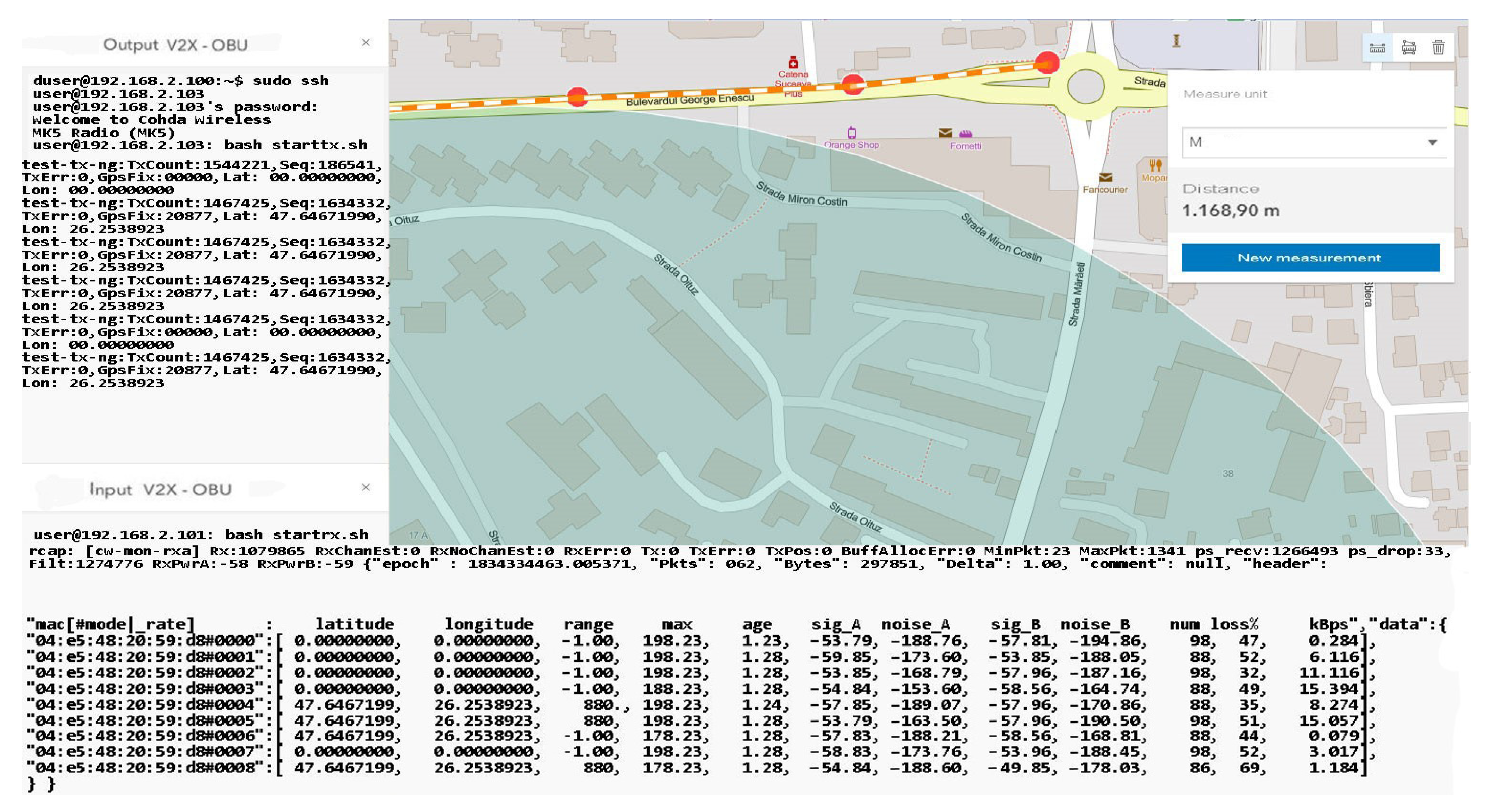
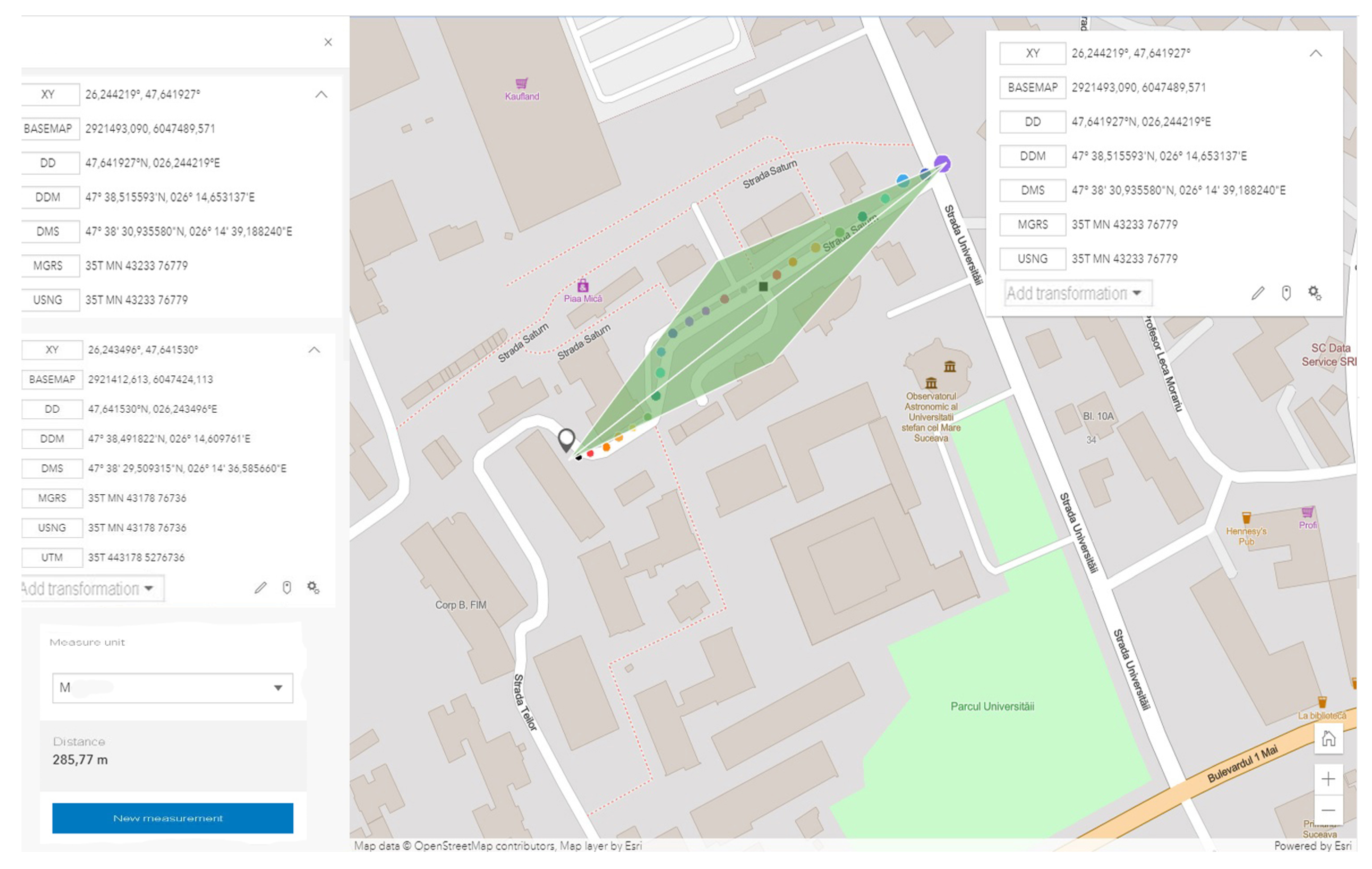
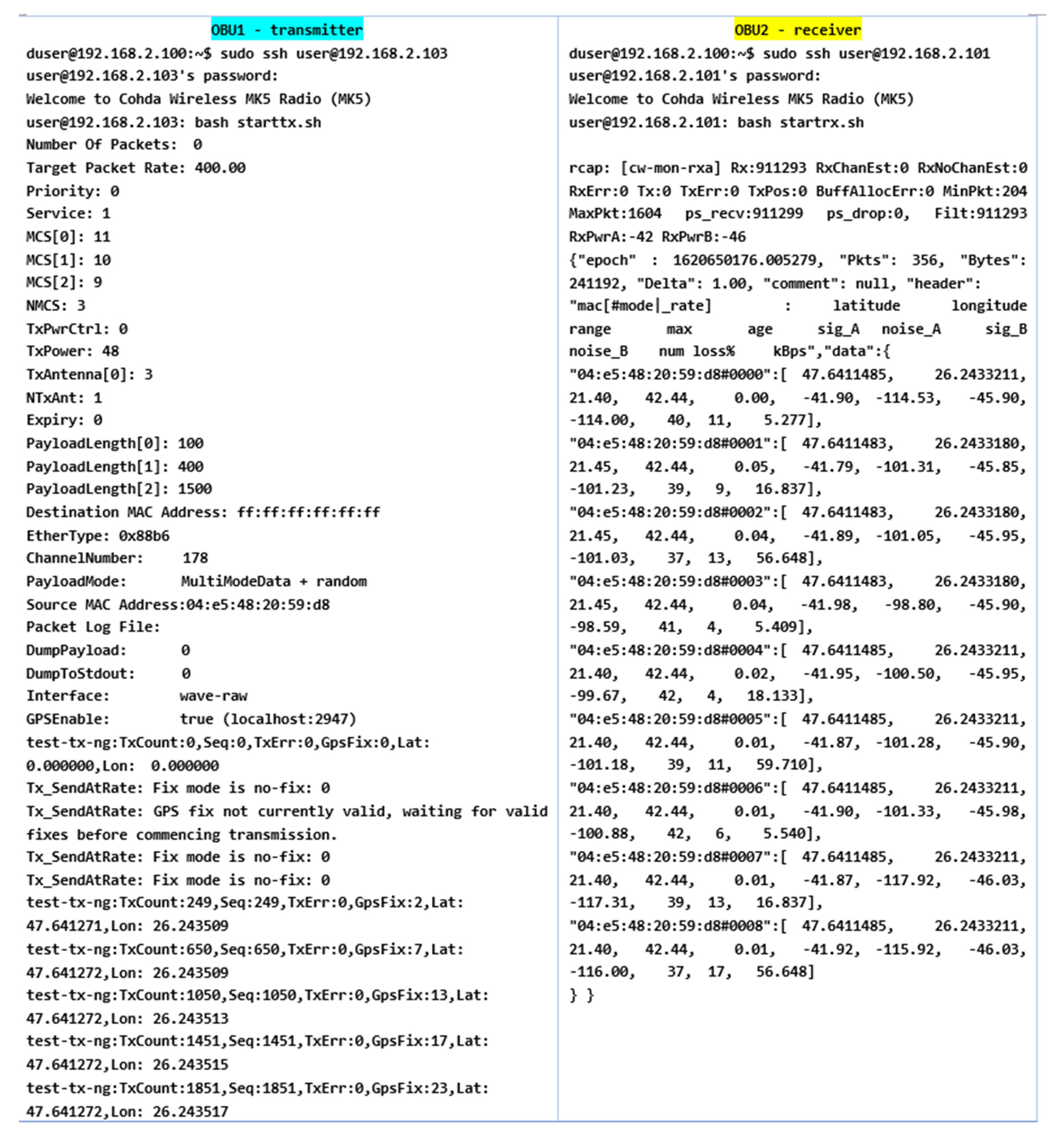
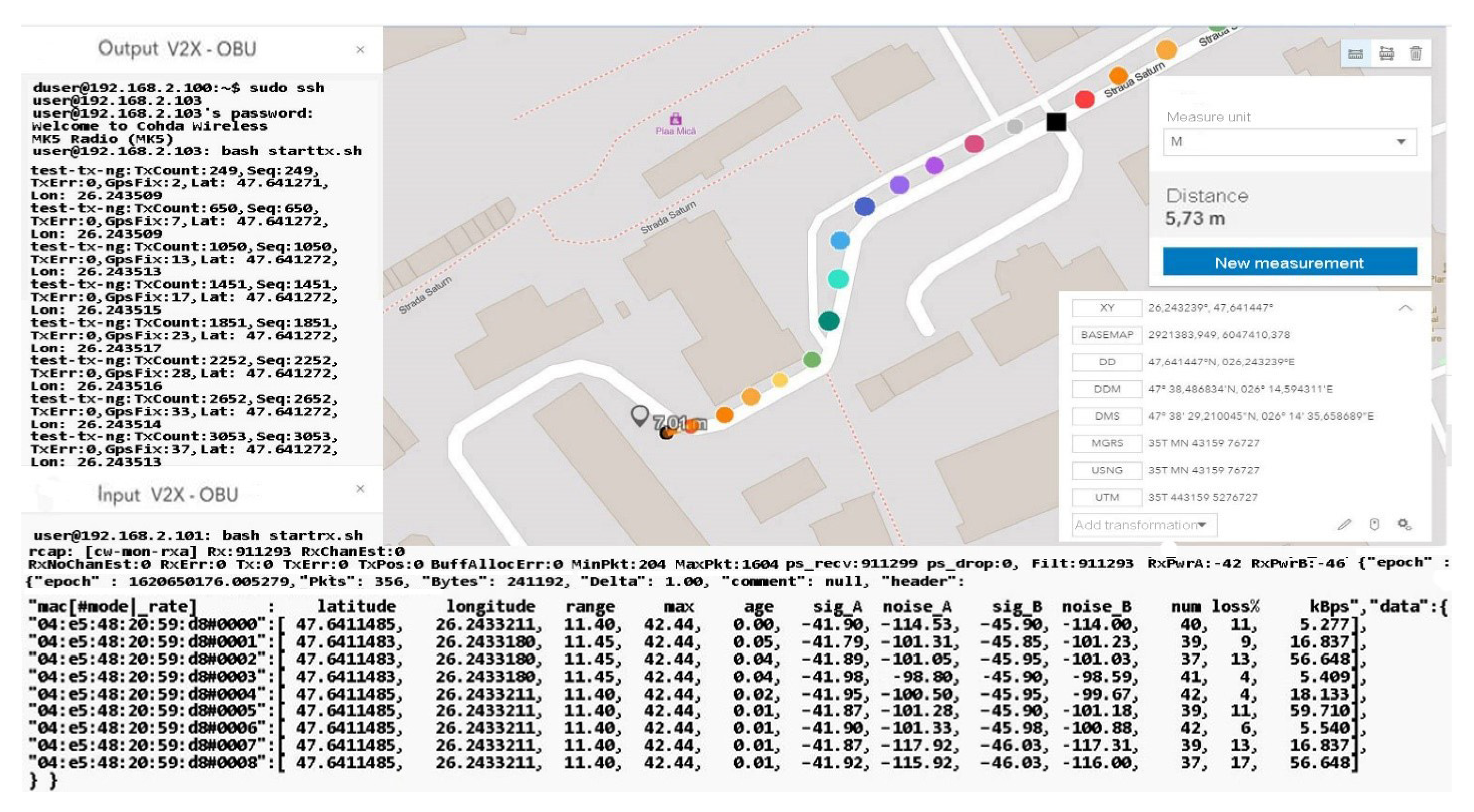
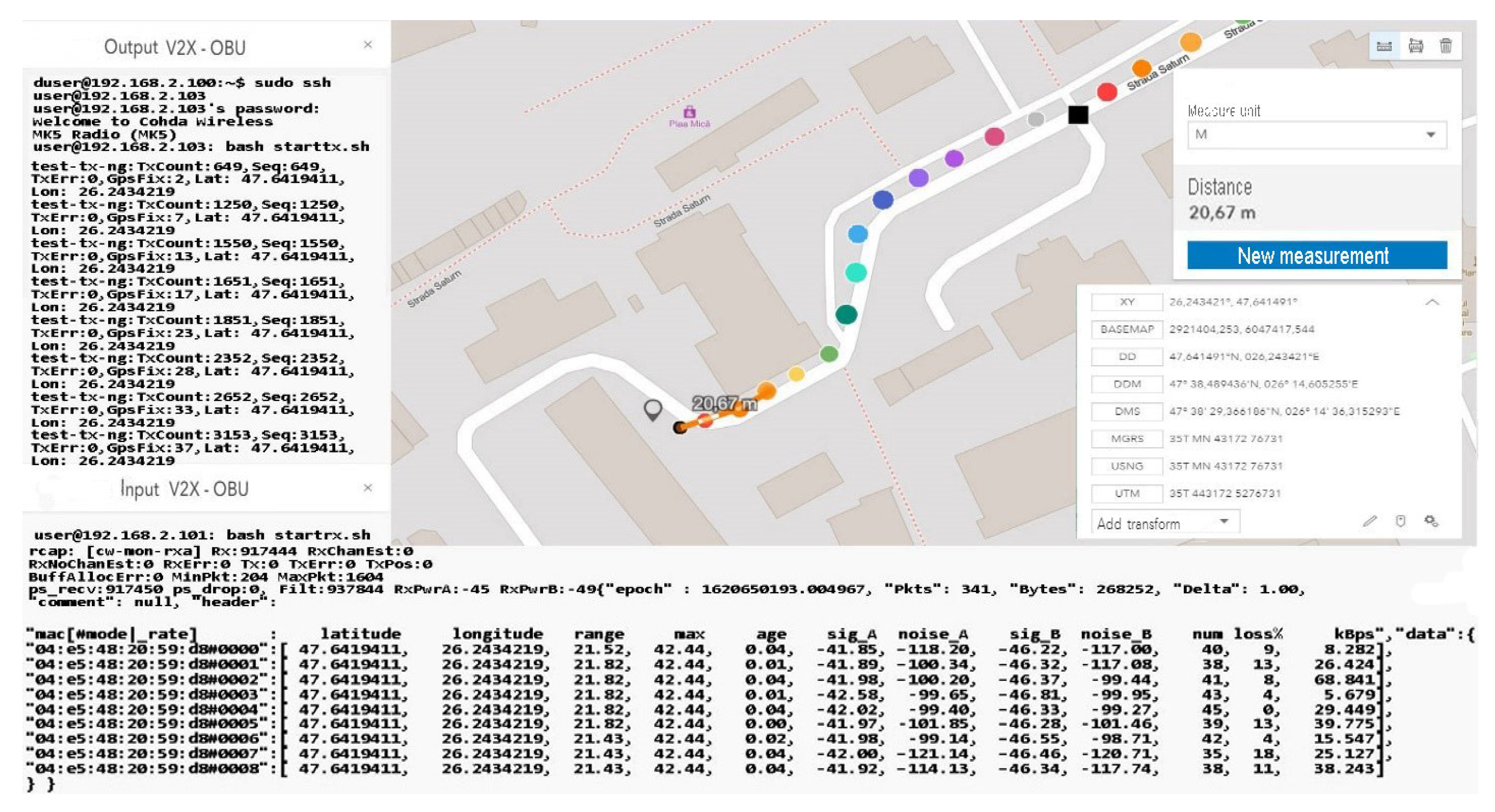
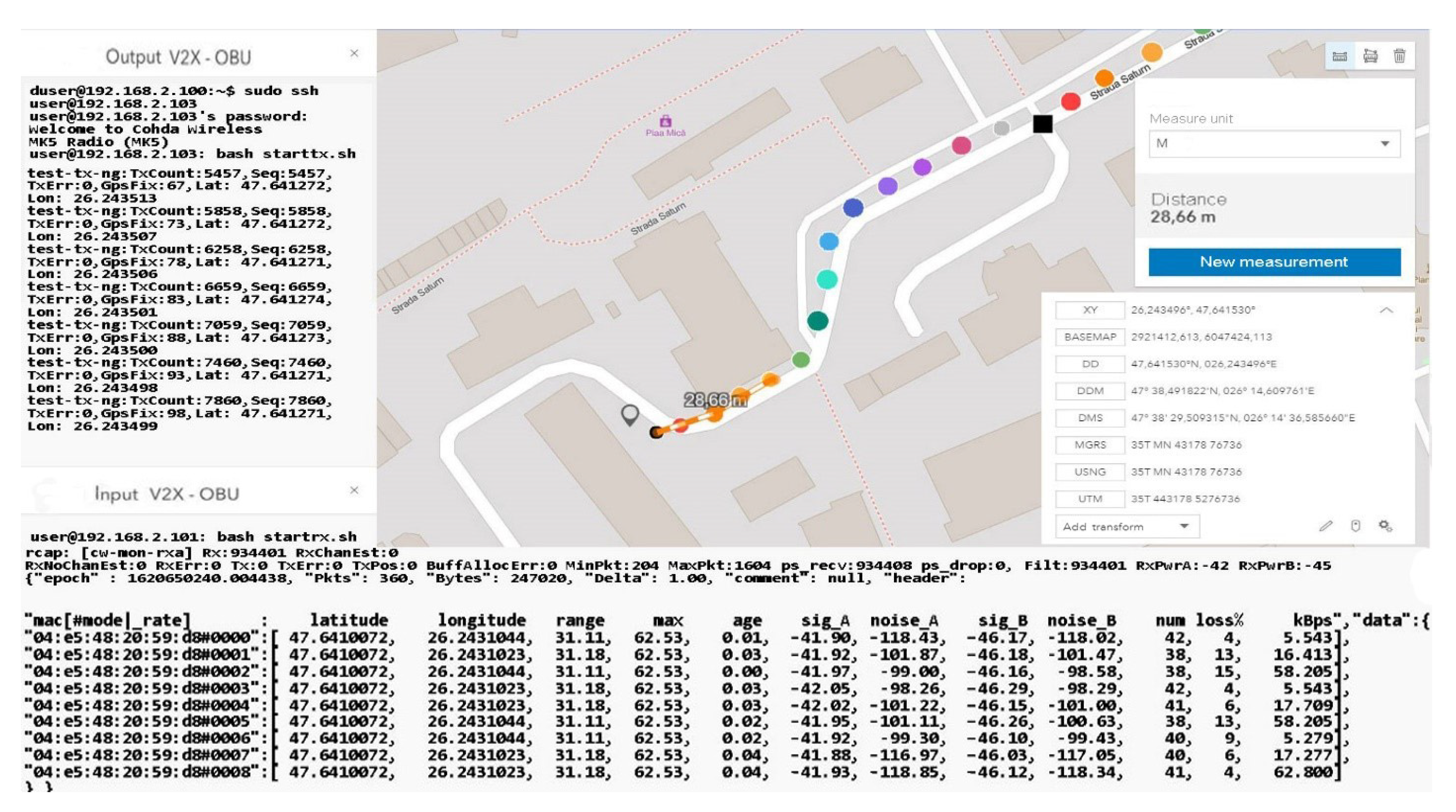
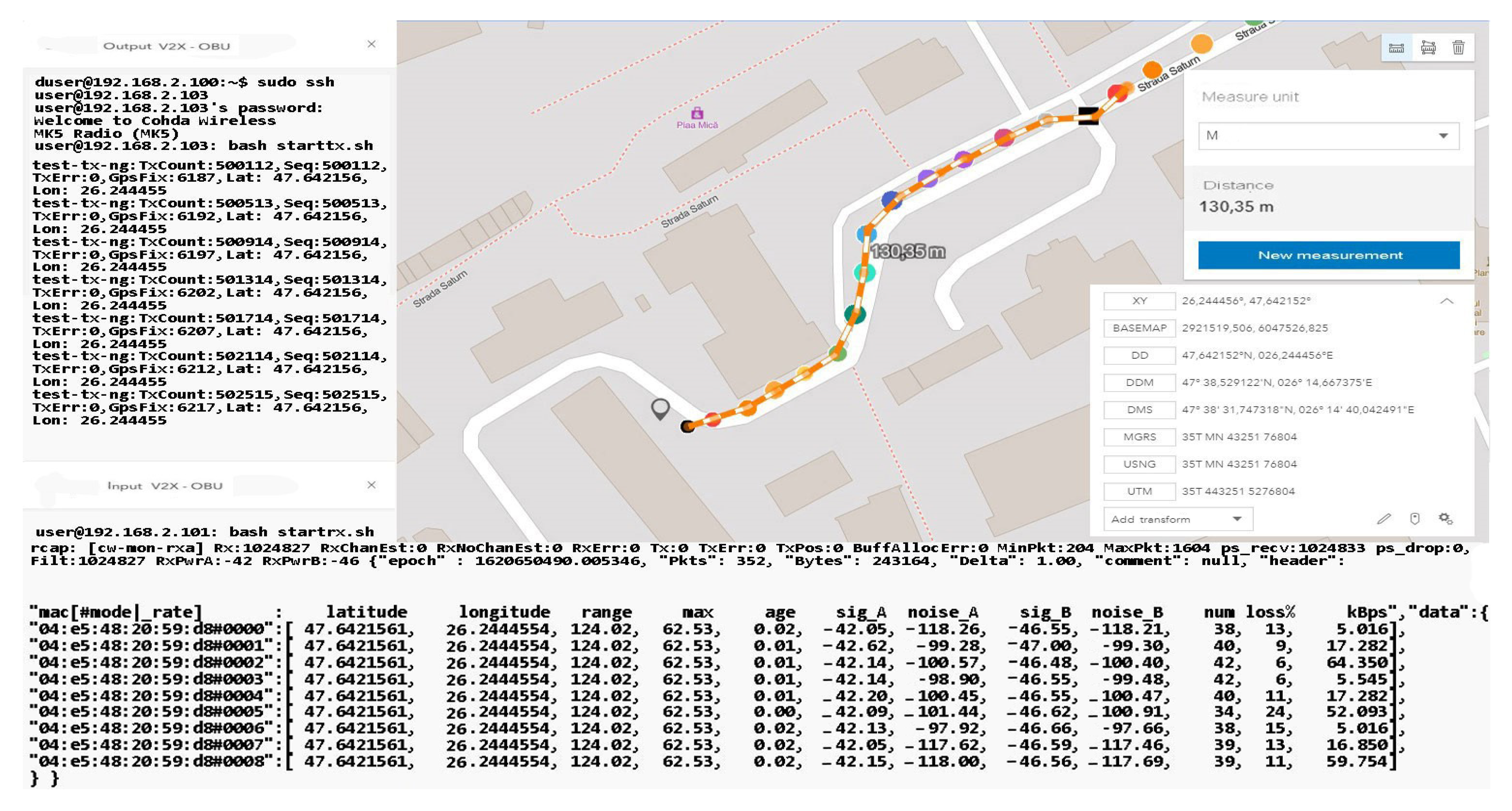
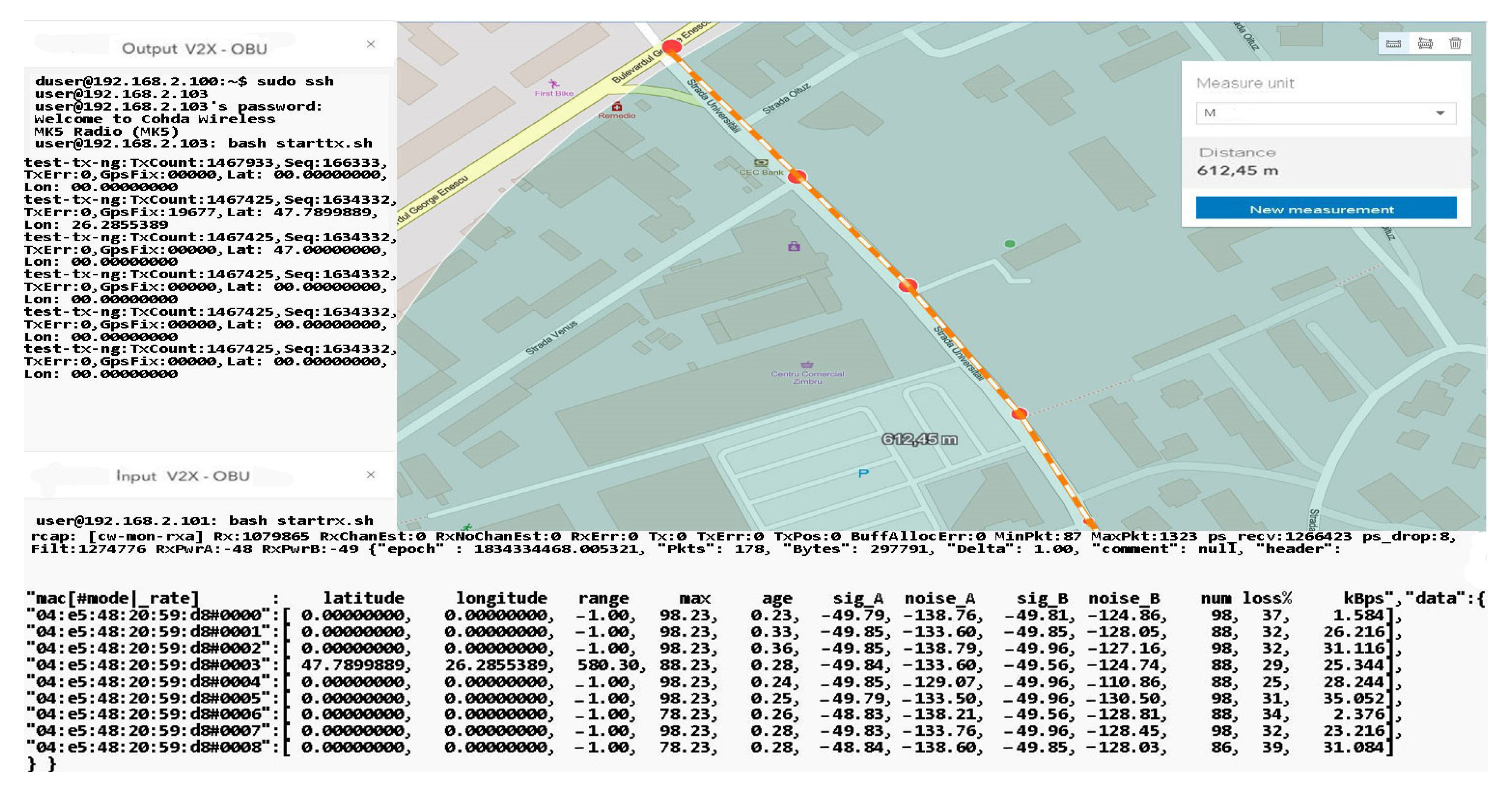
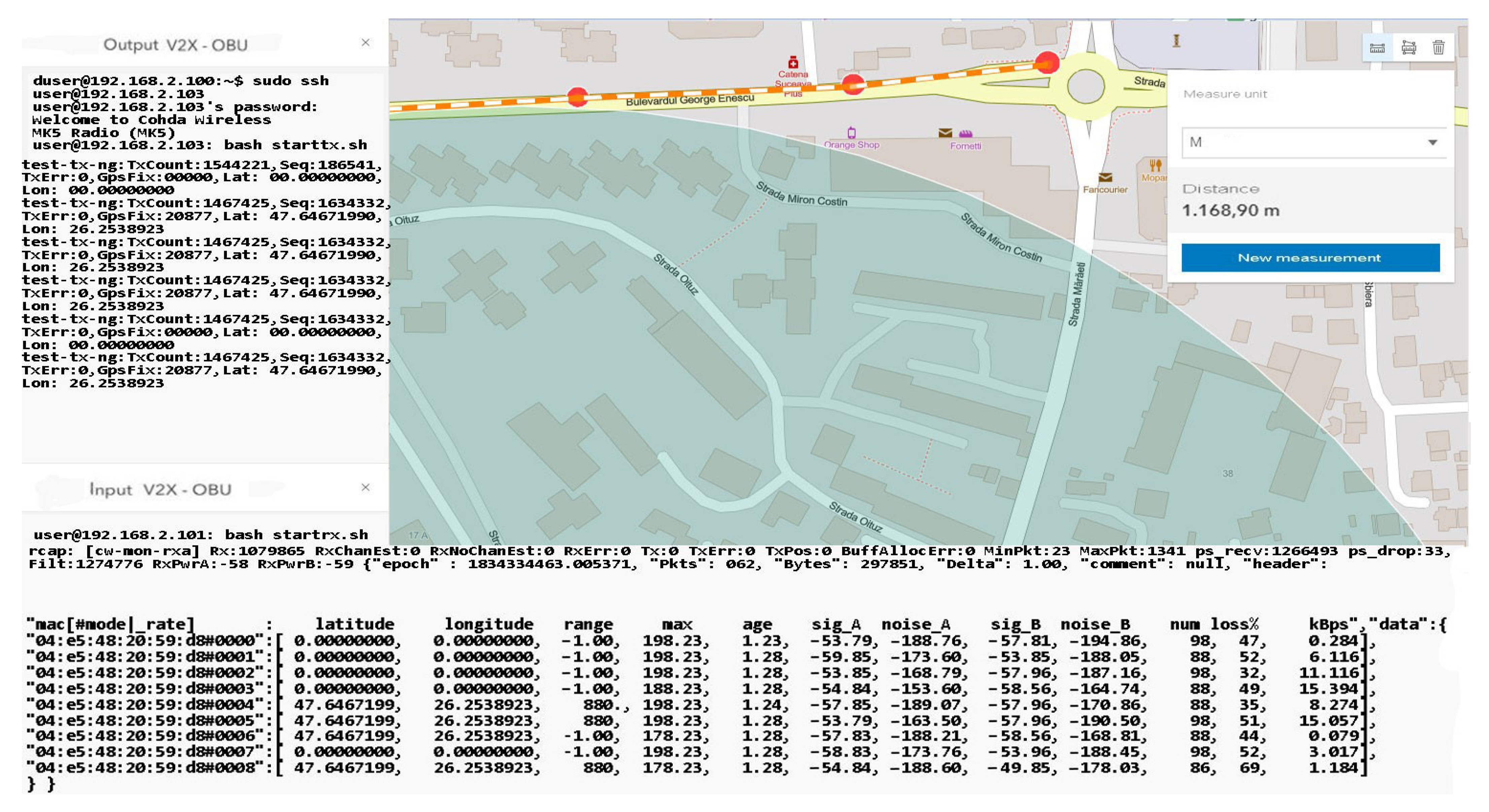
3.5. Test Scenarios in an Externally Controlled Environment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| AODV | On-demand Distance Vector |
| ASN.1 | Abstract Syntax Notation One |
| BRAN | Broad Band Radio Access |
| BSSID7 | Basic service set identifiers |
| C-ITS | Cooperative Intelligent Transport Systems |
| CA | Cooperative Awareness |
| CAM | Cooperative Awareness Messages |
| CAN | Controller Area Network |
| CENELEC2 | European Committee for Electrotechnical Standardization |
| CSMA | Carrier-Sense Multiple Access |
| DCC | Decentralized Congestion System |
| DEN | Decentralized Environment Network |
| DENM | Decentralized Environment Notification Messages |
| DNM | Default Mode Network |
| DSRC | Dedicated Short-Range Communications |
| ESO | European Level Organizations |
| ETSI | European Telecommunications Standards Institute |
| GBD | Global Burden of Disease |
| GDP | Gross Domestic Product |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| ITS | Intelligent Transportation System |
| IVI | Initial Vehicle Information |
| LDM | Local Dynamic Mapping |
| LTE | Long-Term Evolution |
| OBU | Onboard Units |
| OFDM | Orthogonal Frequency-Division Multiplexing |
| OSI | Open Systems Interconnection |
| PDU | Packet Data Unit |
| PHY | Physical Layer |
| PSDU | Physical Service Unit |
| RFCOMM | Radio Frequency Communication |
| RSU | Road Side Units |
| SPP | Service Program Process |
| UDP | User Datagram Protocol |
| UMTS | Universal Mobile Telecommunications System |
| UUID | Universal ID |
| V2I | Vehicle-to-Infrastructure |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
| VAG | Volkswagen AG |
| VANET | Vehicular Ad Hoc Networks |
References
- U.S. Department of Transportation Research and Innovative Technology Administration. Frequency of Target Crashes for IntelliDrive Safety Systems; Technical Report; U.S. Department of Transportation Research and Innovative Technology Administration: Washington, DC, USA, 2010. [Google Scholar]
- CAMP Vehicle Safety Communication Consortium. Vehicle Safety Communications Project Task 3 Final Report; Technical Report DOTHS 809 859; CAMP Vehicle Safety Communication Consortium: Farmington Hills, MI, USA, 2005. [Google Scholar]
- Euro NCAP. 2020 Roadmap—European New Car Assessment Programme. 2017. Available online: https://cdn.euroncap.com/media/58242/euro-ncap-rating-review-2018-version-12-with-appendices.pdf (accessed on 14 September 2021).
- World Health Organization WHO. The 10 Leading Causes of Death in the World, 2017 and 2018. Fact Sheet. Available online: https://www.who.int/news-room/fact-sheets/detail/the-top-10-causes-of-death (accessed on 14 September 2021).
- He, Y.; Liu, Z.; Zhou, X.; Zhong, B. Analysis of Urban Traffic Accidents Features and Correlation with Traffic Congestion in Large-Scale Construction District. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changhsa, China, 27–28 May 2017; IEEE: Changhsa, China, 2017; pp. 641–644. [Google Scholar] [CrossRef]
- Chang, F.R.; Huang, H.L.; Schwebel, D.C.; Chan, A.H.S.; Hu, G.Q. Global road traffic injury statistics: Challenges, mechanisms and solutions. Chin. J. Traumatol. 2020, 23, 216–218. [Google Scholar] [CrossRef]
- Yannis, G.; Papadimitriou, E.; Folla, K. Effect of GDP changes on road traffic fatalities. Saf. Sci. 2014, 63, 42–49. [Google Scholar] [CrossRef]
- Komarnicka, A.; Murawska, A. Comparison of Consumption and Renewable Sources of Energy in European Union Countries-Sectorial Indicators, Economic Conditions and Environmental Impacts. Energies 2021, 14, 3714. [Google Scholar] [CrossRef]
- Afrin, T.; Yodo, N. A Survey of Road Traffic Congestion Measures towards a Sustainable and Resilient Transportation System. Sustainability 2020, 12, 4660. [Google Scholar] [CrossRef]
- Mobility and Transport—Curent Trends and Issues Transport in the European Union—Edition 2020 from European Commission Transportation. 10 July 2021. Available online: https://www.consilium.europa.eu/en/council-eu/configurations/tte/ (accessed on 14 September 2021).
- Sofijanic, S.S.; Arsic, S.M.; Kovaniovic, D.; Arsic, M.Z.; Kalac, S.; Ribaric, Z.; Kostadinovic, D.; Peulic, V.; Rosulj, D.; Fazekas, T.; et al. Influence of Business-Operational Performances and Company Size on CO2 Emissions Decrase-Case of Serbian Road Transport Companies. Sustainability 2021, 13, 8176. [Google Scholar] [CrossRef]
- Mobility in Germany—Transportation Volume September 2019 Structure and Trends, Follmer, Robert and Gruschwitz, Federal Ministry of Transport and Digital Infrastructure. 10 July 2021. Available online: https://www.bmvi.de/SharedDocs/DE/Anlage/G/mid-2017-short-report.pdf?__blob=publicationFile (accessed on 14 September 2021).
- Garcia-Olivares, A.; Solé, J.; Samsó, R.; Ballabrera-Poy, J. Sustainable European Transport System in a 100% Renewable Economy. Sustainability 2020, 12, 5091. [Google Scholar] [CrossRef]
- World Health Organization WHO. Road Traffic Injuries, 2018–2020. Fact Sheet. Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 14 September 2021).
- European Union. Roadmap To a Single European Tranport Area—Towards a Competitive and Resource Efficient Transport System. Withepaper. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=COM:2011:0144:FIN:EN:PDF (accessed on 14 September 2021).
- Wang, J.; Wu, J.; Li, Y. The Driving Safety Field Based on Driver–Vehicle–Road Interactions. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2203–2214. [Google Scholar] [CrossRef]
- Petrov, T.; Sevcik, L.; Pocta, P.; Dado, M. A Performance Benchmark for Dedicated Short-Range Communications and LTE-Based Cellular-V2X in the Context of Vehicle-to-Infrastructure Communication and Urban Scenarios. Sensors 2021, 21, 5095. [Google Scholar] [CrossRef]
- Naudts, D.; Maglogiannis, V.; Hadiwardoyo, S.; van den Akker, D.; Vanneste, S.; Mercelis, S.; Hellinckx, P.; Lannoo, B.; Marquez-Barja, J.; Moerman, I. Vehicular Communication Management Framework: A Flexible Hybrid Connectivity Platform for CCAM Services. Future Internet 2021, 13, 81. [Google Scholar] [CrossRef]
- Guo, J.; Kurup, U.; Shah, M. Is it Safe to Drive? An Overview of Factors, Metrics, and Datasets for Driveability Assessment in Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3135–3151. [Google Scholar] [CrossRef]
- Abdelhak, S.; Sekhar Gurram, C.; Tessier, J.; Ghosh, S.; Bayoumi, M. ETSSI: Energy-Based Task Scheduling Simulator for Wireless Sensor Networks. In Proceedings of the 2011 IEEE International Symposium of Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, 15–18 May 2011; IEEE: Rio de Janeiro, Brazil, 2011; pp. 2821–2824. [Google Scholar] [CrossRef]
- ISO/IEC/IEEE International Standard-Health informatics-Point-of-care medical device communication-Application profile-Base standard. In ISO/IEEE 11073-20101:2004(E); IEEE: Vernier, Geneva, 2014; pp. 1–92. [CrossRef]
- Jian, L.; Sedillot, S.; Traverson, B. OMG Object Transaction Service based on an X/Open and ISO OSI TP kernel. In Proceedings of the Thirtieth Hawaii International Conference on System Sciences, Wailea, HI, USA, 7–10 January 1997; IEEE: Wailea, HI, USA, 1997; pp. 110–119. [Google Scholar] [CrossRef]
- Barzola, J.; Rubini, L. The Telegestore System Evolved According OSI Model and Its Performance Compared with the New IEEE 1901.2 Standard. In Proceedings of the 2014 IEEE Central America and Panama Convention (CONCAPAN XXXIV), Panama City, Panama, 12–14 November 2014; IEEE: Panama City, Panama, 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Inserra, D.; Hu, W.; Wen, G. Antenna Array Synthesis for RFID-Based Electronic Toll Collection. IEEE Trans. Antennas Propag. 2018, 66, 4596–4605. [Google Scholar] [CrossRef]
- Mavromatis, I.; Tassi, A.; Piechocki, R.J. Operating ITS-G5 DSRC over Unlicensed Bands: A City-Scale Performance Evaluation. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; IEEE: Istambul, Turkey, 2019; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Abunei, A.; Comşa, C.; Bogdan, I. Implementation of ETSI ITS-G5 Based Inter-Vehicle Communication Embedded System. In Proceedings of the 2017 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 13–14 July 2017; IEEE: Iasi, Romania, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Miao, Y.; Dong, X.; Bourassa, M.A.; Zhu, D. Effects of Different Wave Spectra on Wind-Wave Induced Doppler Shift Estimates. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; IEEE: Waikoloa, HI, USA, 2020; pp. 5705–5708. [Google Scholar] [CrossRef]
- Farrokhi, G.; Zokaei, S. Improving Safety Message Dissemination in IEEE 802.11e Based VANETs Using Direction Oriented Controlled Repetition Technique. In Proceedings of the 2014 IEEE 21st Symposium on Communications and Vehicular Technology in the Benelux (SCVT), Delft, The Netherlands, 10 November 2014; IEEE: Delft, The Netherlands, 2014; pp. 100–104. [Google Scholar] [CrossRef]
- Rajput, N.S. Measurement of IEEE 802.11p Performance for Basic Safety Messages in Vehicular Communications. In Proceedings of the 2018 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December 2018; IEEE: Indore, India, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Network. IEEE Internet Things J. 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- He, D.; Yang, J.; Guan, K.; Ai, B.; Zhong, Z.; Zhao, Z.; Miao, D.; Guan, H. Ray-Tracing Simulation and Analysis of Propagation for 3GPP High Speed Scenarios. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; IEEE: Paris, France, 2017; pp. 2890–2894. [Google Scholar] [CrossRef]
- Campisi, T.; Severino, A.; Al-Rashid, M.A.; Pau, G. The Development of the Smart Cities in the Connected and Autonomous Vehicles (CAVs) Era: From Mobility Patterns to Scaling in Cities. Infrastructures 2021, 6, 100. [Google Scholar] [CrossRef]
- Große, P.; Andrich, C.; Kotterman, W.; Ihlow, A.; Galdo, G.D. Measuring ETSI ITS-G5 Communications Latencies with Commercial off-the-shelf Wi-Fi Hardware. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018; IEEE: Munich, Germany, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- ETSI EN 302 663 V1.2.0 Draft. Intelligent Transport Systems (ITS); Access Layer Specification for Intelligent Transport Systems Operating in the 5 GHz Frequencyband. 2012. Available online: http://www.etsi.org (accessed on 27 October 2021).
- Lorenzen, T.; Tchouankem, H. Evaluation of an Awareness Control Algorithm for VANETs Based on ETSI EN 302 637-2 V1.3.2. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; IEEE: London, UK, 2015; pp. 2458–2464. [Google Scholar] [CrossRef]
- Aznar-Poveda, J.; Egea-López, E.; García-Sánchez, A. Cooperative Awareness Message Dissemination in EN 302 637-2: An Adaptation for Winding Roads. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; IEEE: Antwerp, Belgium, 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Lyamin, N.; Vinel, A.; Jonsson, M. Does ETSI Beaconing Frequency Control Provide Cooperative Awareness? In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; IEEE: London, UK, 2015; pp. 2393–2398. [Google Scholar] [CrossRef] [Green Version]
- Vinel, A.; Lyamin, N.; Isachenkov, P. Modeling of V2V Communications for C-ITS Safety Applications: A CPS Perspective. IEEE Commun. Lett. 2018, 22, 1600–1603. [Google Scholar] [CrossRef]
- Lyamin, N.; Vinel, A.; Jonsson, M.; Bellalta, B. Cooperative Awareness in VANETs: On ETSI EN 302 637-2 Performance. IEEE Trans. Veh. Technol. 2018, 67, 17–28. [Google Scholar] [CrossRef]
- ETSI EN 302 637-3 V1.2.0 Draft. Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part3: Specifications of DecentralizedEnvironmental Notification Basic Service. 2013. Available online: https://www.etsi.org/deliver/etsi_en/302600_302699/30263703/01.02.00_20/en_30263703v010200a.pdf (accessed on 14 September 2021).
- Botte, M.; Pariota, L.; D’Acierno, L.; Bifulco, G.N. An Overview of Cooperative Driving in the European Union: Policies and Practices. Electronics 2019, 8, 616. [Google Scholar] [CrossRef] [Green Version]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Cosovanu, L.-M.; Dimian, M. Traffic Flow Density Model and Dynamic Traffic Congestion Model Simulation Based on Practice Case with Vehicle Network and System Traffic Intelligent Communication. Symmetry 2020, 12, 1172. [Google Scholar] [CrossRef]
- Lee, K.-h. Performance Analysis of the IEEE 802.11ax MAC Protocol for Heterogeneous Wi-Fi Networks in Non-Saturated Conditions. Sensors 2019, 19, 1540. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Yang, G. A Stable Backup Routing Protocol for Wireless Ad Hoc Networks. Sensors 2020, 20, 6743. [Google Scholar] [CrossRef]
- Khan, U.A.; Lee, S.S. Multi-Layer Problems and Solutions in VANETs: A Review. Electronics 2019, 8, 204. [Google Scholar] [CrossRef] [Green Version]
- IEEE 802.11—IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems. Local and Metropolitan Area Networks -Specific Requirements. Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. Amendment 6: Wireless Access in Vehicular Environments. 2010-07. Available online: https://standards.ieee.org/standard/802_11p-2010.html (accessed on 14 September 2021).
- Zadobrischi, E.; Dimian, M. Inter-Urban Analysis of Pedestrian and Drivers through a Vehicular Network Based on Hybrid Communications Embedded in a Portable Car System and Advanced Image Processing Technologies. Remote Sens. 2021, 13, 1234. [Google Scholar] [CrossRef]
- Takeuchi, Y. Focal Plane Array Doppler Imaging with Per-Pixel CW-Doppler Receiver Array. In Proceedings of the 2000 IEEE Ultrasonics Symposium. Proceedings. An International Symposium (Cat. No.00CH37121), San Juan, PR, USA, 22–25 October 2000; IEEE: San Juan, PR, USA, 2000; pp. 1501–1504. [Google Scholar] [CrossRef]
- Liu, L.; Zheng, J. Algorithms for Doppler Spectral Density Data Quality Control and Merging for the Ka-Band Solid-State Transmitter Cloud Radar. Remote Sens. 2019, 11, 209. [Google Scholar] [CrossRef] [Green Version]
- Spaanderman, P. Infrastructural Message Sets Standardization at CEN and ISO. In Proceedings of the 6th ETSI ITS Workshop, Berlin, Germany, 12–13 February 2014. [Google Scholar]
- Miao, L.; Virtusio, J.J.; Hua, K.-L. PC5-Based Cellular-V2X Evolution and Deployment. Sensors 2021, 21, 843. [Google Scholar] [CrossRef]
- Shrestha, R.; Nam, S.Y.; Bajracharya, R.; Kim, S. Evolution of V2X Communication and Integration of Blockchain for Security Enhancements. Electronics 2020, 9, 1338. [Google Scholar] [CrossRef]
- Shan, M.; Narula, K.; Wong, Y.F.; Worrall, S.; Khan, M.; Alexander, P.; Nebot, E. Demonstrations of Cooperative Perception: Safety and Robustness in Connected and Automated Vehicle Operations. Sensors 2021, 21, 200. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specifications | |
|---|---|---|
| Frequency band | 5.9 GHz, 760 MHz, 2.4 GHz | |
| Transmitted power | 5.9 GHZ: −10 to +23 dBm | 5.9 GHz: Class C |
| Reception sensitivity | 5.9 GHz: −97 dBm | @ 3 Mbps |
| Alternative Antenna | 5.9 GHz: CDD Transmission diversity MRC Diversity reception | |
| Band width | 10 MHz, 20 MHz | |
| Transfer speeds | 3 to 54 Mbps | |
| Power supply/Consumption | 3.3 V și 5.0 V/4 W (maximum) | |
| Temperature range | −40 °C și + 85 °C | |
| Dimensions | 40 (L) × 30 (W) × 4 (H) mm | |
| Standard | IEEE 802.11p—2010, ETSI ES 202 663, IEEE 1609.4—2010 |
| Number Channels ID | of Antenna MCS | Without Multipath [dBm] 1 Typical (Min) | Without Multipath [dBm] 2 Typical (Min) | Highway Nlos [dBm] 1 Typical (Min) | Without Multipath [dBm] 2 Typical (Min) |
|---|---|---|---|---|---|
| 11 | ½ BPSK | −98 (−95) | −99 (−97) | −95 (−92) | −97 (−95) |
| 15 | ¾ BPSK | −96 (−96) | −98 (−96) | −92 (−89) | −95 (−93) |
| 10 | ½ QPSK | −97 (−95) | −97 (−95) | −88 (−85) | −92 (−90) |
| 14 | ¾ QPSK | −93 (−90) | −95 (−93) | −86 (−83) | −89 (−87) |
| 9 | ½ 16 QAM | −90 (−87) | −92 (−90) | −85 (−82) | −88 (−86) |
| 13 | ¾ 16 QAM | −86 (−83) | −88 (−86) | −82 (−79) | −85 (−86) |
| 8 | ⅔ 64 QAM | −82 (−79) | −84 (−82) | na | na |
| 12 | ¾ 64 QAM | −80 (−77) | −83 (−81) | na | na |
| Derivation | Relative Power [dB] | Delay [ns] | Doppler Frequency [Hz] |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 1 | −2 | 200 | 689 |
| 2 | −5 | 433 | −492 |
| 3 | −7 | 700 | 886 |
| Scenario/m | Packets/no | Distance/m | Signal [dB] | Noise [dBm] | Bytes/s | Stability/m | kBps | Loss |
|---|---|---|---|---|---|---|---|---|
| Scenario 7 m | 356 | 11 m | −41.90/−45.00 | −117 | 241,192 | 0.05 | 56.648 | 17% |
| Scenario 13 m | 361 | 13 m | −42.00/−46.00 | −120 | 248,252 | 0.04 | 62.841 | 18% |
| Scenario 20 m | 341 | 21 m | −42.00/−46.81 | −120.71 | 268,252 | 0.04 | 68.841 | 18% |
| Scenario 30 m | 360 | 31 m | −42.02/−46.29 | −118.34 | 247,020 | 0.04 | 62.800 | 15% |
| Scenario/m | Packets/no | Distance/m | Signal [dB] | Noise [dBm] | Bytes/s | Stability/m | kBps | Loss |
|---|---|---|---|---|---|---|---|---|
| Scenario 55 m | 371 | 49 m | −42.65/−46.91 | −119.2 | 244,024 | 1.62 | 61.212 | 20% |
| Scenario 75 m | 371 | 77 m | −42.51/−47.29 | −115.29 | 259,172 | 1.48 | 68.944 | 15% |
| Scenario 100 m | 371 | 106 m | −42.27/−46.76 | −117.07 | 259,172 | 1.43 | 58.195 | 20% |
| Scenario 130 m | 352 | 127 m | −42.62/−46.55 | −118.21 | 243,164 | 1.37 | 64.350 | 24% |
| Scenario/m | Packets/no | Distance/m | Signal [dB] | Noise [dBm] | Bytes/s | Stability/m | kBps | Loss |
|---|---|---|---|---|---|---|---|---|
| Scenario 175 m | 349 | 175 m | −43.92/−47.33 | −117.89 | 229,068 | 1.28 | 55.087 | 28% |
| Scenario 200 m | 349 | 203 m | −45.97/−47.39 | −119.89 | 229,068 | 1.19 | 65.067 | 28% |
| Scenario 220 m | 325 | 222 m | −43.93/−47.75 | −115.84 | 257,581 | 1.08 | 65.544 | 27% |
| Scenario/m | Packets/no | Distance/m | Signal [dB] | Noise [dBm] | Bytes/s | Stability/m | kBps | Loss |
|---|---|---|---|---|---|---|---|---|
| Scenario 355 m | 278 | 358 m | −58.85/−58.56 | −128.16 | 297,581 | 0.18 | 45.151 | 36% |
| Scenario 521 m | 278 | 528 m | −49.85/−49.96 | −130.50 | 297,681 | 0.56 | 38.216 | 38% |
| Scenario 612 m | 178 | 580 m | −49.85/−49.96 | −130.50 | 297,791 | 0.36 | 35.051 | 39% |
| Scenario 1168 m | 62 | 880 m | −49.85/−49.76 | −189.07 | 297,851 | 0.88 | 15.349 | 69% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zadobrischi, E.; Dimian, M.; Negru, M. The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication. Sensors 2021, 21, 7237. https://doi.org/10.3390/s21217237
Zadobrischi E, Dimian M, Negru M. The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication. Sensors. 2021; 21(21):7237. https://doi.org/10.3390/s21217237
Chicago/Turabian StyleZadobrischi, Eduard, Mihai Dimian, and Mihai Negru. 2021. "The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication" Sensors 21, no. 21: 7237. https://doi.org/10.3390/s21217237
APA StyleZadobrischi, E., Dimian, M., & Negru, M. (2021). The Utility of DSRC and V2X in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication. Sensors, 21(21), 7237. https://doi.org/10.3390/s21217237