
Joint Sparsity for TomoSAR Imaging in Urban Areas Using Building POI and TerraSAR-X Staring Spotlight Data


Abstract
:1. Introduction
2. TomoSAR Imaging Based on Compressive Sensing
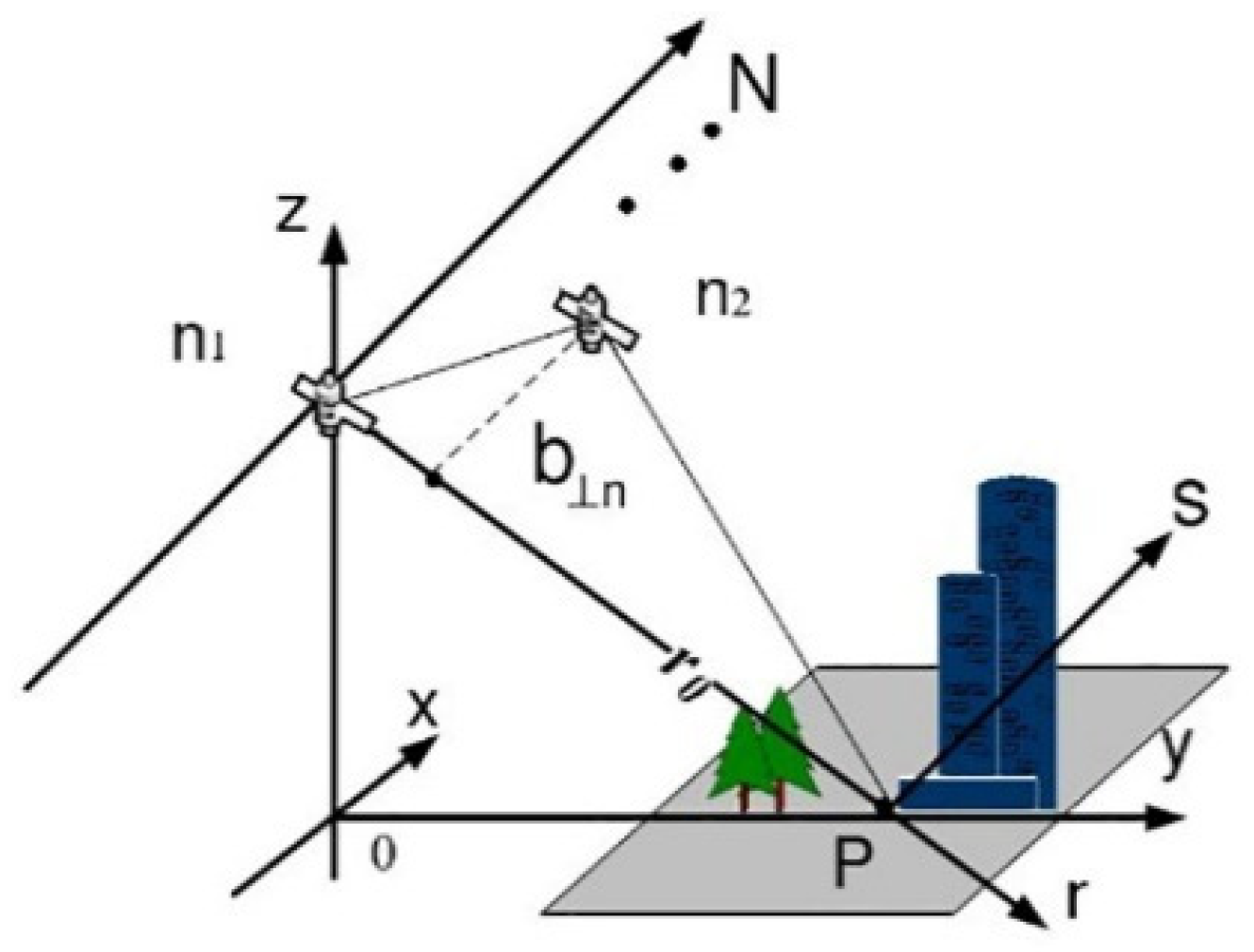
2.1. TomoSAR System Mode
2.2. Compressive Sensing
3. Materials and Methods
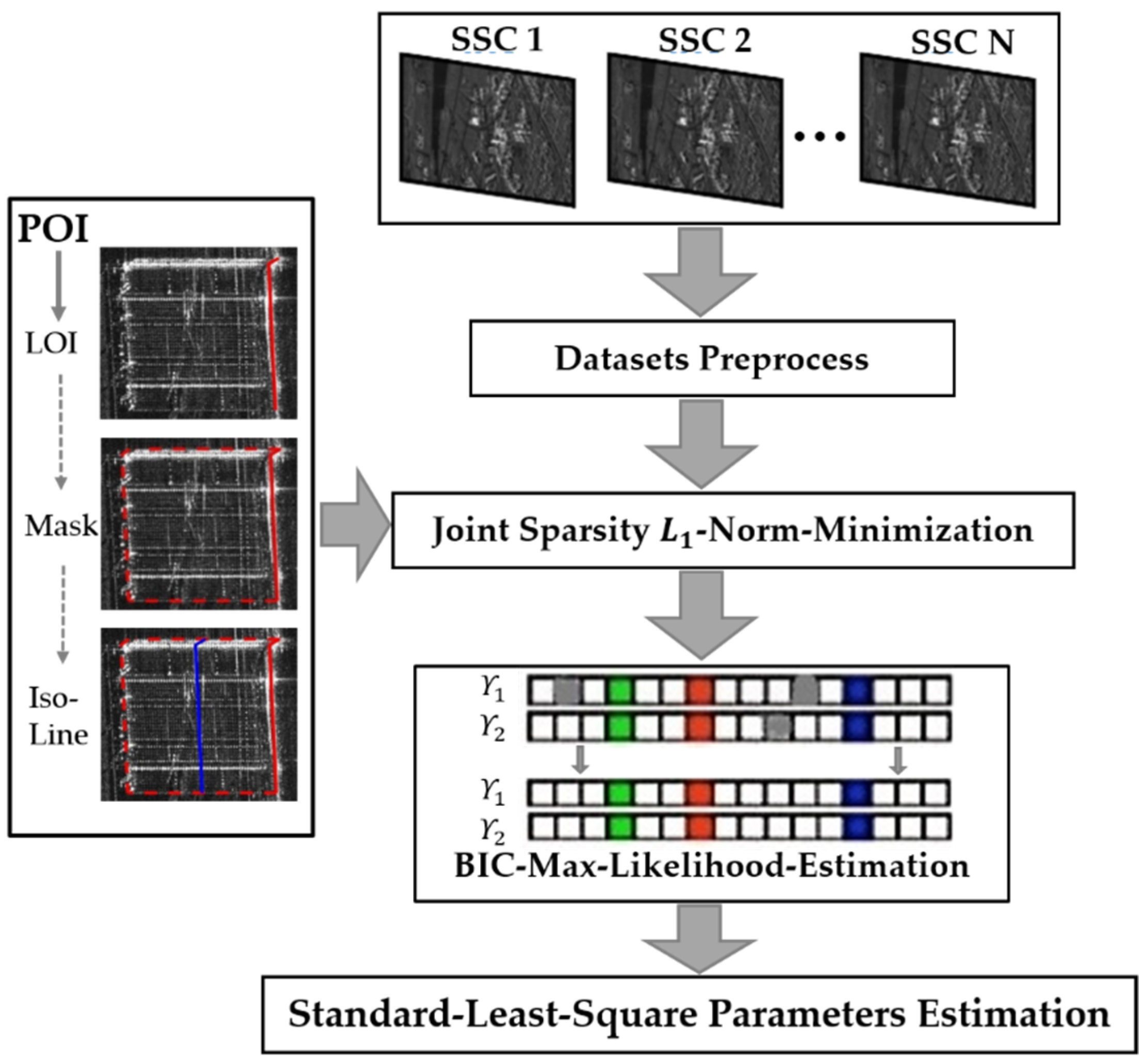
3.1. Joint Sparsity Basic
| Algorithm 1: Procedure to Extract LOI, Mask, and Iso-Height Lines from Building POI. |
| 1: #Generate the LOI; 2: Import image and identify the POI of the test building by geodetic surveying; 3: Connect the POI facing the SAR sensor side to form the LOI and transform it to SAR coordinate system by geocoding; 4: Initialize the max-shift range of the surveyed area and find the pixels that LOI passed; 5: #Generate Mask; 6: While “range shift ≤ range limit”, one must: 7: Shift the LOI in the range direction by a distance of 1 and find the pixels passed in every shift; 8: Compute the pixel average intensity value of every shift; 9: Compute the intensity difference value between every pixel shift and the LOI; 10: Find the maximum difference value; 11: Otherwise, break; 12: #Generate iso-height lines; 13: While “range shift ≤ range limit of Mask”, one must; 14: Shift the LOI only in the range direction by the sub-pixel distance; 15: Compute the distance between a pixel and its adjacent iso-height lines and find the closest iso-height line to the pixel; 16: The pixels belonging to the same iso-height line are associated; 17: Construct new sparse scenario; 18: Otherwise, break; 19: # BIC-MLE; 20: Initialize K == 0, while K == 0–4; 21: Calculate each model based on the BIC for every pixel; 22: Find the model that best fits each pixel, and estimate the elevation, amplitude, and phase; 23: K = K + 1; 24: Otherwise, end. |
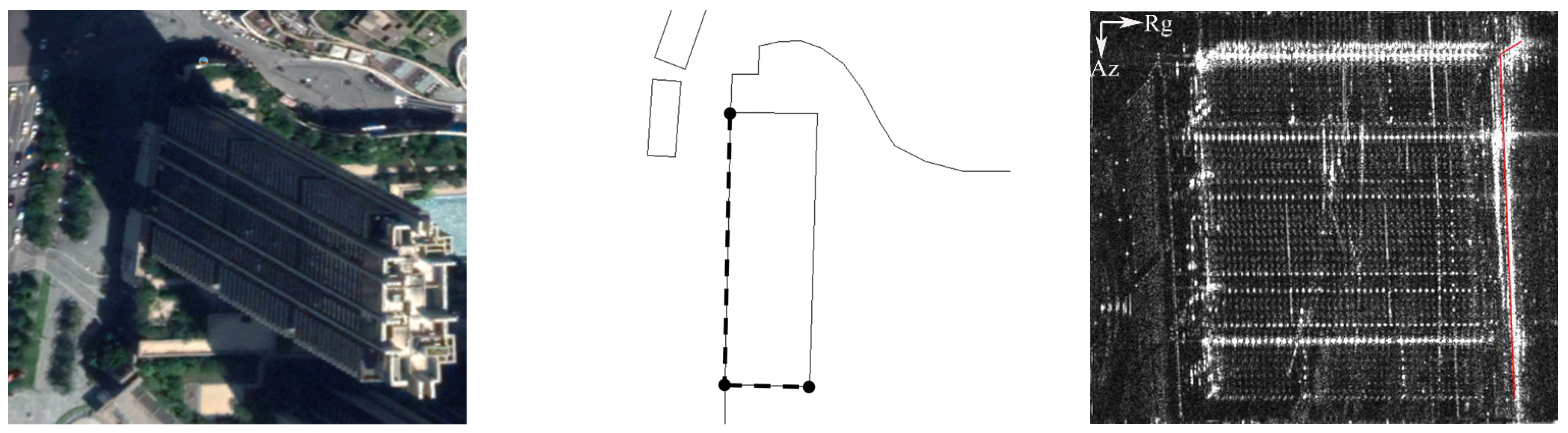
3.2. Building LOI
3.3. Building Mask
3.4. Building ISO-Height Lines
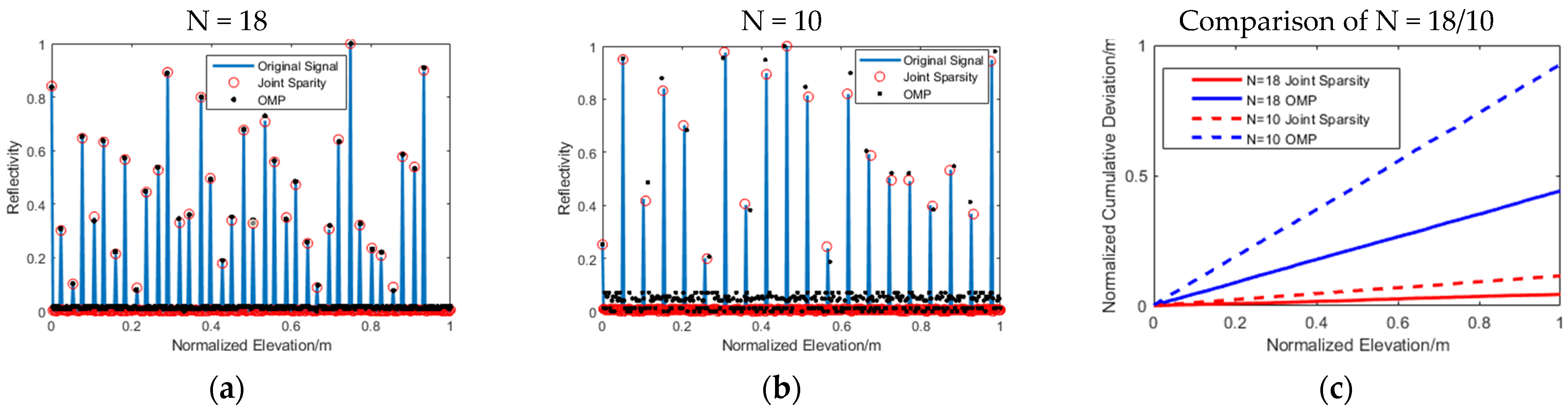
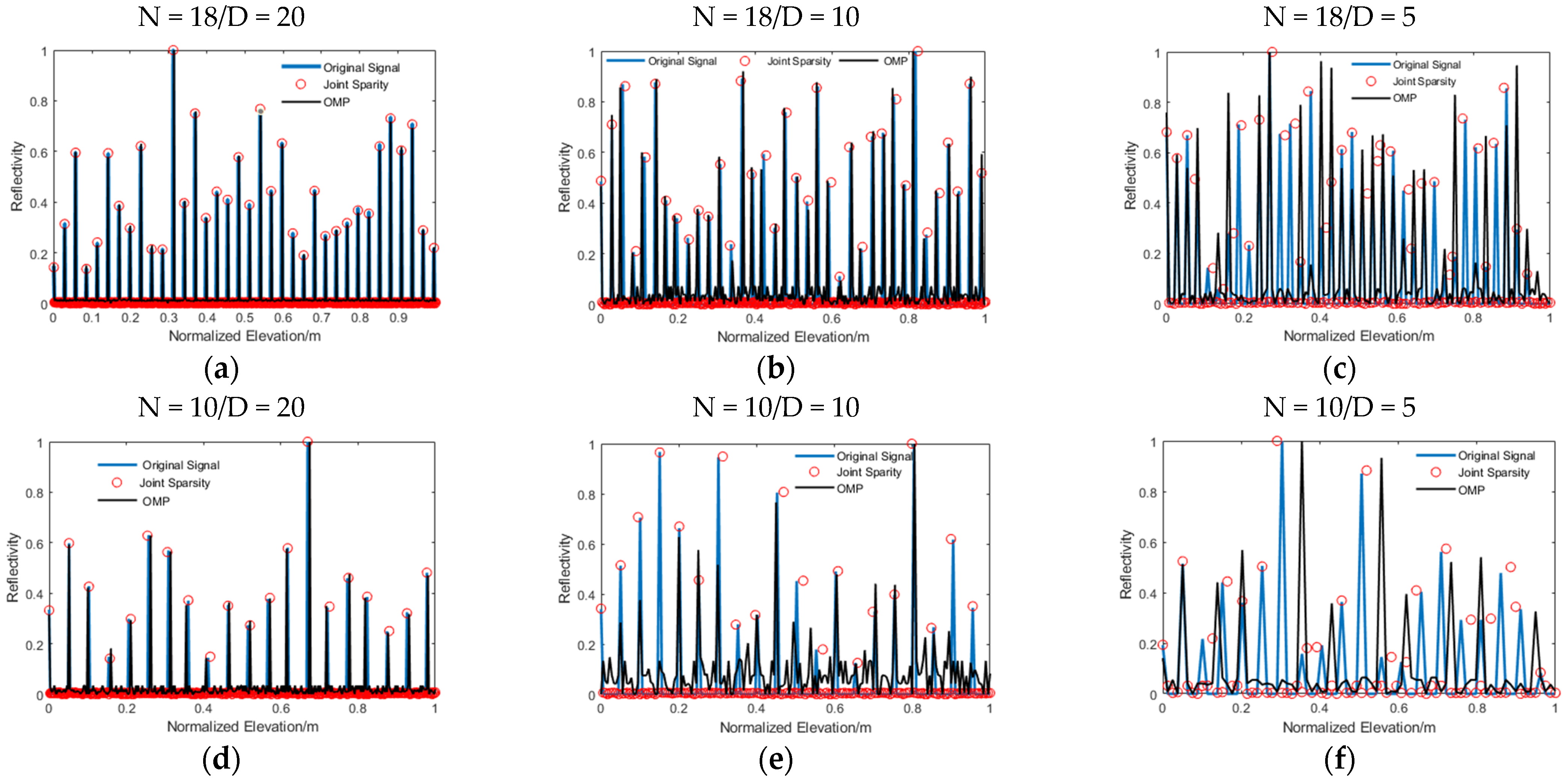
4. Verification of Simulation Data
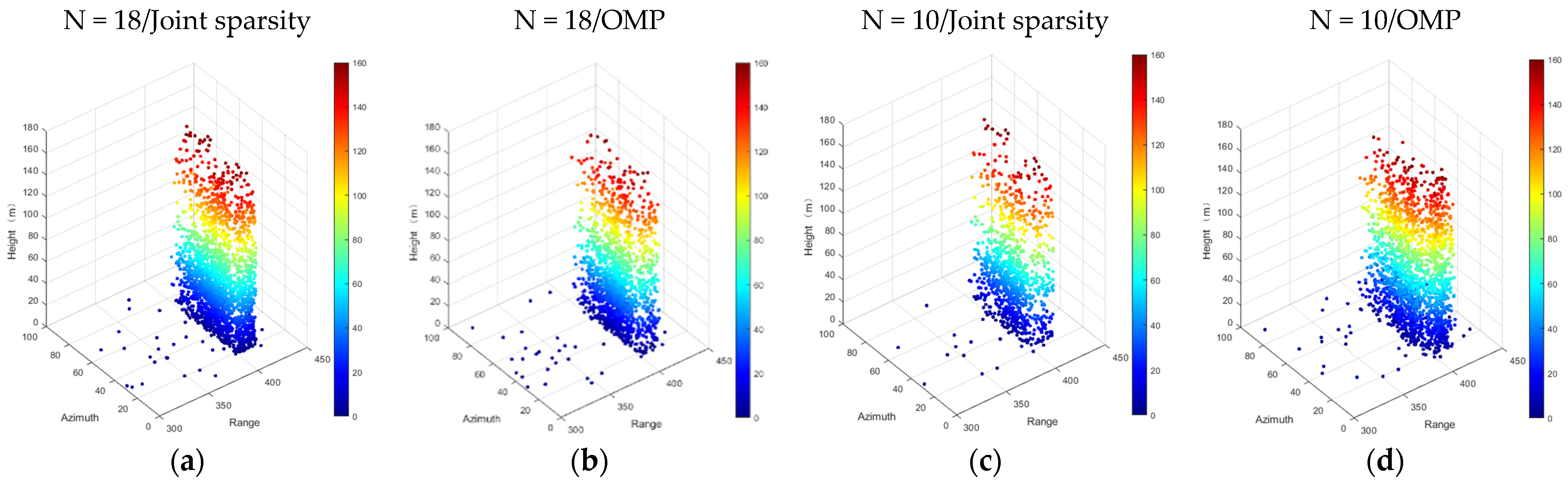
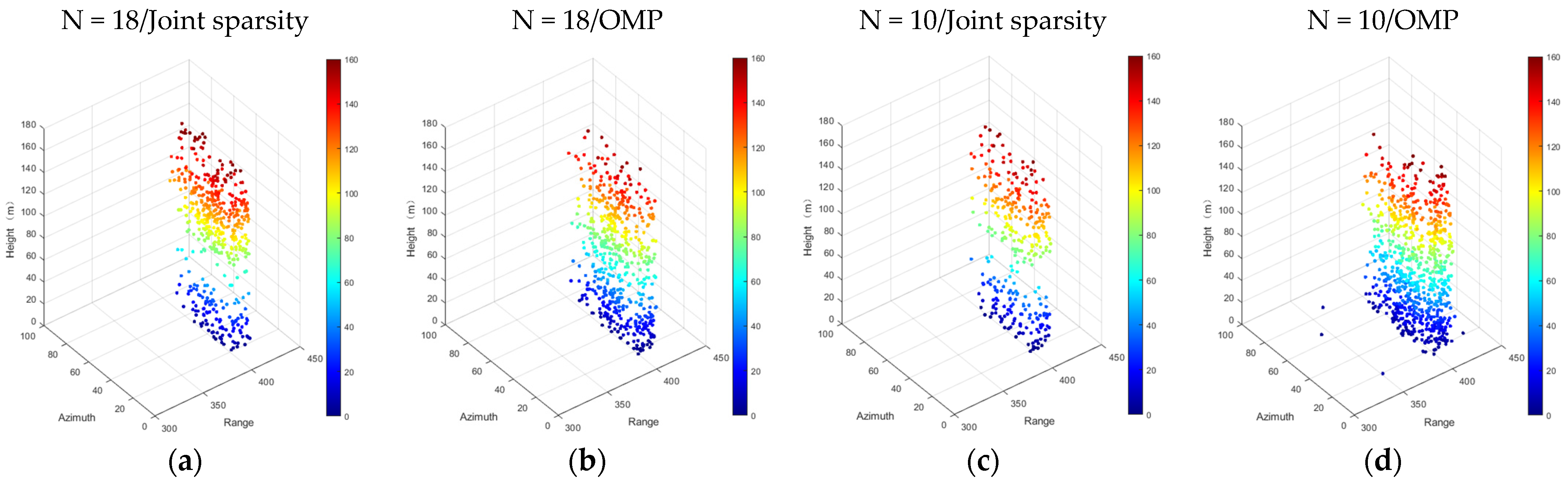
5. Practical Test Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, X.; Wang, Y.; Montazeri, S.; Ge, N. A Review of Ten-Year Advances of Multi-Baseline SAR Interferometry Using TerraSAR-X Data. Remote Sens. 2018, 10, 1374. [Google Scholar] [CrossRef] [Green Version]
- Chibiao, D.; Xiaolan, Q.; Feng, X. Synthetic aperture radar three-dimensional imaging—From TomoSAR and array InSAR to microwave vision. J. Radars 2019, 8, 693–709. [Google Scholar]
- Zhen, L.; Ping, Z.; Haiwei, Q. Advances in information extraction of surface parameters using Tomographic SAR. J. Radars 2020, 9, 20–35. [Google Scholar]
- Ge, N.; Bamler, R.; Hong, D.; Zhu, X.X. Single-Look Multi-Master SAR Tomography: An Introduction. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2132–2154. [Google Scholar] [CrossRef]
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Lombardini, F.; Viviani, F. Multidimensional SAR Tomography: Advances for Urban and Prospects for Forest/Ice Applications. In Proceedings of the 11th European Radar Conference, Rome, Italy, 8–10 October 2014; pp. 225–228. [Google Scholar]
- Fornaro, G.; Serafino, F.; Soldovieri, F. Three-dimensional focusing with multipass SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 507–517. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F.; Montanari, M. Layover solution in multibaseline SAR interferometry. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1344–1356. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Baraniuk, R. Compressive Radar Imaging. IEEE Radar Conf. 2007, 128–133. [Google Scholar]
- Zhu, X.X.; Bamler, R. Tomographic SAR Inversion by L1-Norm Regularization—The Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Bamler, R. Very High Resolution Spaceborne SAR Tomography in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4296–4308. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Bamler, R. Demonstration of Super-Resolution for Tomographic SAR Imaging in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3150–3157. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Hong, W.; Wu, Y. Sparse microwave imaging: Principles and applications. Sci. China Inf. Sci. 2012, 55, 1722–1754. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Liu, F.; Jiao, L.C.; Wang, X. Compressive Sensing SAR Image Reconstruction Based on Bayesian Framework and Evolutionary Computation. IEEE Trans. Image Process. 2011, 20, 1904–1911. [Google Scholar] [CrossRef]
- Chen, F.; Zhou, W.; Chen, C.; Ma, P. Extended D-TomoSAR Displacement Monitoring for Nanjing (China) City Built Structure Using High-Resolution TerraSAR/TanDEM-X and Cosmo SkyMed SAR Data. Remote Sens. 2019, 11, 2326. [Google Scholar] [CrossRef] [Green Version]
- Ma, P.; Lin, H.; Lan, H.; Chen, F. On the Performance of Reweighted L1 Minimization for Tomographic SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2015, 12, 895–899. [Google Scholar] [CrossRef]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Budillon, A.; Evangelista, A.; Schirinzi, G. Three-Dimensional SAR Focusing from Multipass Signals Using Compressive Sampling. IEEE Trans. Geosci. Remote Sens. 2009, 49, 488–499. [Google Scholar] [CrossRef]
- Sun, X.; Yu, A.; Dong, Z.; Liang, D. Three-Dimensional SAR Focusing via Compressive Sensing: The Case Study of Angel Stadium. IEEE Geosci. Remote Sens. Lett. 2012, 9, 759–763. [Google Scholar]
- Zeng, J.; Fang, J.; Xu, Z. Sparse SAR imaging based on L1/2 regularization. Sci. China Inf. Sci. 2012, 55, 1755–1775. [Google Scholar] [CrossRef] [Green Version]
- Budillon, A.; Johnsy, A.C.; Schirinzi, G. Extension of a Fast GLRT Algorithm to 5D SAR Tomography of Urban Areas. Remote Sens. 2017, 9, 844. [Google Scholar] [CrossRef] [Green Version]
- Rambour, C.; Budillon, A.; Johnsy, A.C.; Denis, L.; Tupin, F.; Schirinzi, G. From Interferometric to Tomographic SAR: A Review of Synthetic Aperture Radar Tomography-Processing Techniques for Scatterer Unmixing in Urban Areas. IEEE Geosci. Remote Sens. Mag. 2020, 8, 6–29. [Google Scholar] [CrossRef]
- Budillon, A.; Ferraioli, G.; Schirinzi, G. Localization Performance of Multiple Scatterers in Compressive Sampling SAR Tomography: Results on COSMO-SkyMed Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2902–2910. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Super-Resolution Power and Robustness of Compressive Sensing for Spectral Estimation With Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Shi, Y.; Zhu, X.; Bamler, R. Nonlocal Compressive Sensing-Based SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3015–3024. [Google Scholar] [CrossRef] [Green Version]
- Chai, H.; Lv, X. SAR tomography for point-like and volumetric scatterers using a regularised iterative adaptive approach. Remote Sens. Lett. 2018, 9, 1060–1069. [Google Scholar] [CrossRef]
- Wei, L.; Balz, T.; Zhang, L.; Liao, M. A Novel Fast Approach for SAR Tomography: Two-Step Iterative Shrinkage/Thresholding. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1377–1381. [Google Scholar]
- Hui, L.; Peifeng, M.; Min, C. Basic Principles, Key Techniques and Applications of Tomographic SAR Imaging. J. Geomat. 2015, 40, 1–5. [Google Scholar]
- Budillon, A.; Johnsy, A.C.; Schirinzi, G. Contextual Information Based SAR Tomography of Urban Areas. In Proceedings of the Joint Urban Remote Sensing Event (JURSE), Vannes, France, 22–24 May 2019; pp. 1–4. [Google Scholar]
- Zhu, X.X.; Ge, N.; Shahzad, M. Joint Sparsity in SAR Tomography for Urban Mapping. IEEE J. Sel. Top. Signal Process. 2015, 9, 1498–1509. [Google Scholar] [CrossRef] [Green Version]
- Delbridge, B.G.; Bürgmann, R.; Fielding, E.; Hensley, S.; Schulz, W.H. Three-dimensional surface deformation derived from airborne interferometric UAVSAR: Application to the Slumgullion Landslide. J. Geophys. Res. Solid Earth 2016, 121, 3951–3977. [Google Scholar] [CrossRef] [Green Version]
- Schaefer, L.N.; Lu, Z.; Oommen, T. Post-Eruption Deformation Processes Measured Using ALOS-1 and UAVSAR InSAR at Pacaya Volcano, Guatemala. Remote Sens. 2016, 8, 73. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhu, X.X.; Zeisl, B.; Pollefeys, M. Fusing Meter-Resolution 4-D InSAR Point Clouds and Optical Images for Semantic Urban Infrastructure Monitoring. IEEE Trans. Geosci. Remote Sens. 2017, 55, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Chai, H.; Lv, X.; Xiao, P. Deformation Monitoring Using Ground-Based Differential SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2020, 17, 993–997. [Google Scholar] [CrossRef]
- Wen, H.; Yanping, W.; Yun, L.; Weixian, T.; Yirong, W. Research Progress on Three-dimensional SAR Imaging Techniques. J. Radars 2018, 7, 633–654. [Google Scholar]
- Budillon, A.; Johnsy, A.; Schirinzi, G. Urban Tomographic Imaging Using Polarimetric SAR Data. Remote Sens. 2019, 11, 132. [Google Scholar] [CrossRef] [Green Version]
- Aichun, W.; Maosheng, X. SAR tomography based on block compressive sensing. J. Radars 2016, 5, 57–64. [Google Scholar]
- Duque, S.; Breit, H.; Balss, U.; Parizzi, A. Absolute Height Estimation Using a Single TerraSAR-X Staring Spotlight Acquisition. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1735–1739. [Google Scholar] [CrossRef] [Green Version]
- Ge, N.; Gonzalez, F.R.; Wang, Y.; Shi, Y.; Zhu, X.X. Spaceborne Staring Spotlight SAR Tomography—A First Demonstration with TerraSAR-X. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3743–3756. [Google Scholar] [CrossRef] [Green Version]
- Fornaro, G.; Lombardini, F.; Serafino, F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 702–714. [Google Scholar] [CrossRef]
- Fornaro, G.; Serafino, F. Imaging of Single and Double Scatterers in Urban Areas via SAR Tomography. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3497–3505. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Decoding by linear programming. IEEE Trans. Inf. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Tao, T. Near-Optimal Signal Recovery from Random Projections: Universal Encoding Strategies. IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Shahzad, M. Facade Reconstruction Using Multiview Spaceborne TomoSAR Point Clouds. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3541–3552. [Google Scholar] [CrossRef]
- Yi-rong, W.; Wen, H.; Bing-chen, Z. Current Developments of Sparse Microwave Imaging. J. Radars 2014, 3, 383–395. [Google Scholar]
- Ming-sheng, L.; Lian-huan, W.; Zi-yun, W.; Balz, T.; Lu, Z. Compressive Sensing in High-resolution 3D SAR Tomography of Urban Scenarios. J. Radars 2015, 4, 123–129. [Google Scholar]
- Stoica, P.; Selen, Y. Model-order selection: A review of information criterion rules. IEEE Signal Process. Mag. 2004, 21, 36–47. [Google Scholar] [CrossRef]
- Chibiao, D.; Xiaolan, Q.; Yirong, W. Concept, system, and method of holographic synthetic aperture radar. J. Radars 2020, 9, 399–408. [Google Scholar]
- Baron, D.; Duarte, M.F.; Sarvotham, S.; Wakin, M.B.; Baraniuk, R.G. An information-theoretic approach to distributed compressed sensing. In Proceedings of the 45th Conference on Communication, Control, and Computing, Houston, TX, USA, 25–28 September 2005. [Google Scholar]
- Wimalajeewa, T.; Varshney, P.K. OMP based joint sparsity pattern recovery under communication constraints. IEEE Trans. Signal Process. 2014, 62, 5059–5072. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.; Wang, B.; Sun, C.; Wang, S.; Hu, J.; Song, Z. Joint Sparsity Constraint Interferometric ISAR Imaging for 3-D Geometry of Near-Field Targets with Sub-Apertures. Sensors 2018, 18, 3750. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eldar, Y.C.; Rauhut, H. Average Case Analysis of Multichannel Sparse Recovery Using Convex Relaxation. IEEE Trans. Inf. Theory 2010, 56, 505–519. [Google Scholar] [CrossRef] [Green Version]
- Seeger, M.W.; Wipf, D.P. Variational Bayesian Inference Techniques. IEEE Signal Process. Mag. 2010, 27, 81–91. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| POI | Latitude/Deg | Longitude/Deg | Height/M |
|---|---|---|---|
| A | 22.55513197 | 113.88121665 | 0.987 |
| B | 22.55513975 | 113.88109875 | 1.012 |
| C | 22.55564238 | 113.88098455 | 0.995 |
| RMSE | Joint Sparsity | OMP |
|---|---|---|
| N = 18 | 0.554 | 0.919 |
| N = 10 | 1.097 | 1.679 |
| Mean Value | Joint Sparsity | OMP |
|---|---|---|
| D = 20 | 0.012 0.017 | 0.018 0.024 |
| D = 10 | 0.013 0.019 | 0.028 0.129 |
| D = 05 | 0.022 0.025 | 0.139 0.279 |
| Some Parameters of a TerraSAR-X Staring Spotlight Acquisition of Shenzhen | |
|---|---|
| Incident Angle | 35.380° |
| Polarization Mode | HH |
| Number of Azimuth Beams | 113 |
| Azimuth Steering Angle | ±2.210° |
| Azimuth Resolution | 0.230 m |
| Slant Range Resolution | 0.588 m |
| Scene Azimuth Extent | 3052.988 m |
| Scene Range Extent | 6262.264 m |
| Common PRF | 42,400 Hz |
| Azimuth Look Bandwidth | 38,292.780 Hz |
| Range Look Bandwidth | 300 MHz |
| Scene Duration Time | 0.43 s |
| RAW Duration Time | 6.73 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, L.; Gai, Y.; Zhang, T. Joint Sparsity for TomoSAR Imaging in Urban Areas Using Building POI and TerraSAR-X Staring Spotlight Data. Sensors 2021, 21, 6888. https://doi.org/10.3390/s21206888
Pang L, Gai Y, Zhang T. Joint Sparsity for TomoSAR Imaging in Urban Areas Using Building POI and TerraSAR-X Staring Spotlight Data. Sensors. 2021; 21(20):6888. https://doi.org/10.3390/s21206888
Chicago/Turabian StylePang, Lei, Yanfeng Gai, and Tian Zhang. 2021. "Joint Sparsity for TomoSAR Imaging in Urban Areas Using Building POI and TerraSAR-X Staring Spotlight Data" Sensors 21, no. 20: 6888. https://doi.org/10.3390/s21206888
APA StylePang, L., Gai, Y., & Zhang, T. (2021). Joint Sparsity for TomoSAR Imaging in Urban Areas Using Building POI and TerraSAR-X Staring Spotlight Data. Sensors, 21(20), 6888. https://doi.org/10.3390/s21206888