
Hardware Implementation and RF High-Fidelity Modeling and Simulation of Compressive Sensing Based 2D Angle-of-Arrival Measurement System for 2–18 GHz Radar Electronic Support Measures


Abstract
1. Introduction
- A 6-channel 2–18 GHz RF/digital receiver hardware, using PXIe form-factor, integrated with a 6-element 2–18 GHz cavity-backed-spiral-antenna (CBSA) array with randomly located element positions given in [39];
- To demonstrate that the CS-based AoA method introduced in [39] can be used in dynamic REW engagement environment, the RF HF-M&S approach was used to model:
- ○
- An engagement scenario in the System Tool Kit (STK) [44] with a ground-based S-band target acquisition radar (TAR) and an aircraft equipped with a RESM system that has the CS-based AoA measurement capability;
- ○
- The S-band radar transmitting system behavioral model in SystemVue (SVE) [45];
- ○
- A 6-channel microwave-digital receiving system behavioral model in SVE, and
- ○
- The CS-based AoA algorithm [39] in Matlab.
- The measurement setup for AoA lab test from 2 to 18 GHz, and
- Measurement and simulation results.
2. CS-Based 2D AoA Algorithm Using Randomly-Spaced Array (RSA)
2.1. Outline of the Method
2.2. Measured Data from K Digital Receivers Connected to A K-Element RSA
2.3. Dictionary, Sensing and Recover Matrices
2.4. Equations Used for Recovering
3. Hardware Implementation of the 6-Channel RESM Digital Receiver and Open Lab Measurement Setup
3.1. Randomly-Spaced CBSA Array
3.2. PXIe Ultra-Wideband Microwave Digital Receiver
3.3. The Open Lab AoA Measurement Setup
- Az from −180 to 180 (deg) at 30 (deg) interval, and
- El from 30 to 90 (deg) at 10 (deg) interval.
4. Using RF HF-M&S Methodology to Study CS-Based AoA Estimator in REW Environment
4.1. The Vignette of the TAR Signal AoA Measurement by the Airborne CS-Based AoA Estimator
4.2. The SVE Models of the TAR TX and the 6-Channel RF Digital Receiver
5. Measurement and RF HF-M&S Results
5.1. Lab Measurement Results
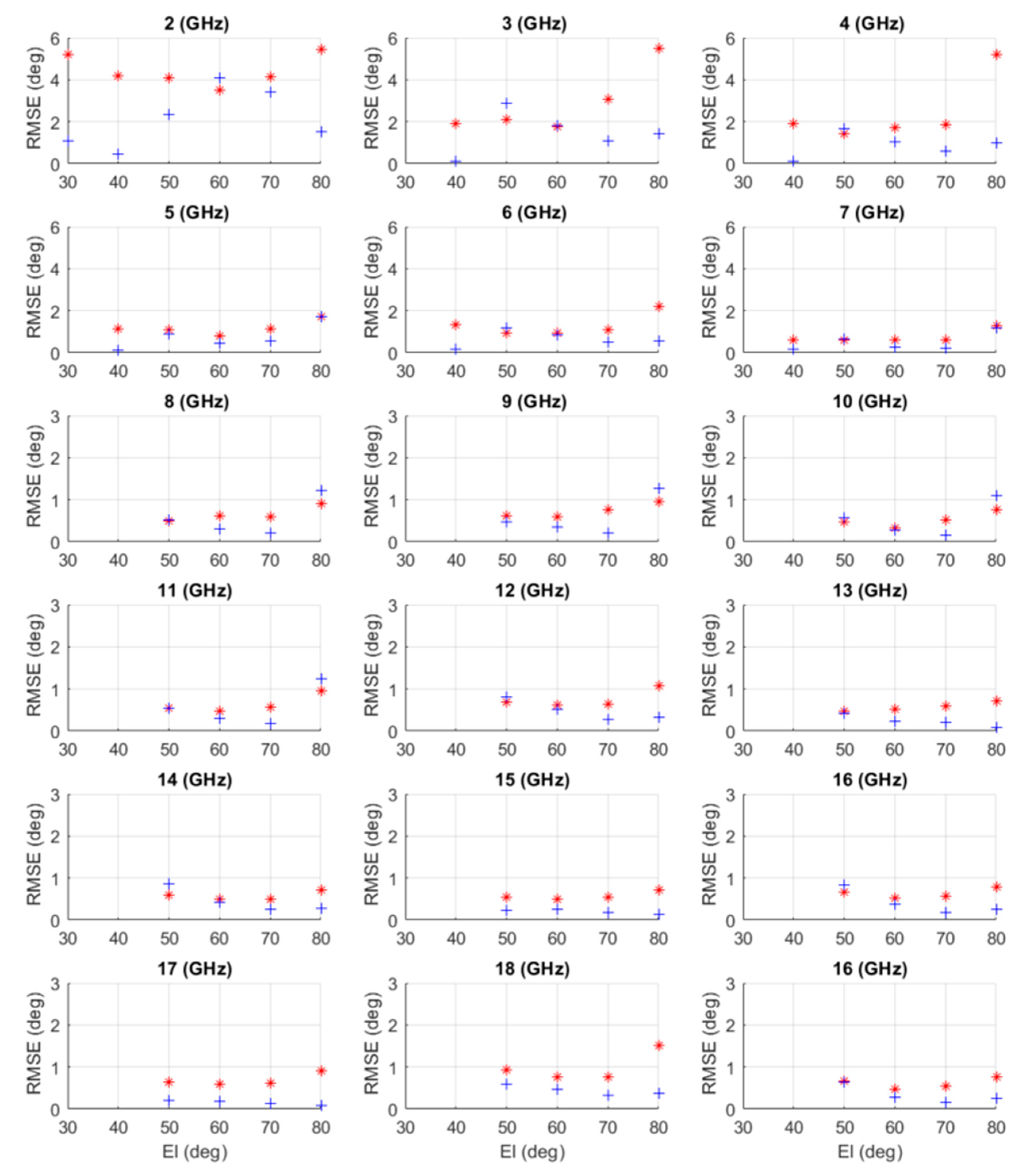
- The AoA measurement system had better AoA estimation when frequency increased from 2 to 8 (GHz). After 8 (GHz), the estimation errors were almost the same. The observation was the same as the results obtained in the M&S in Table 6.
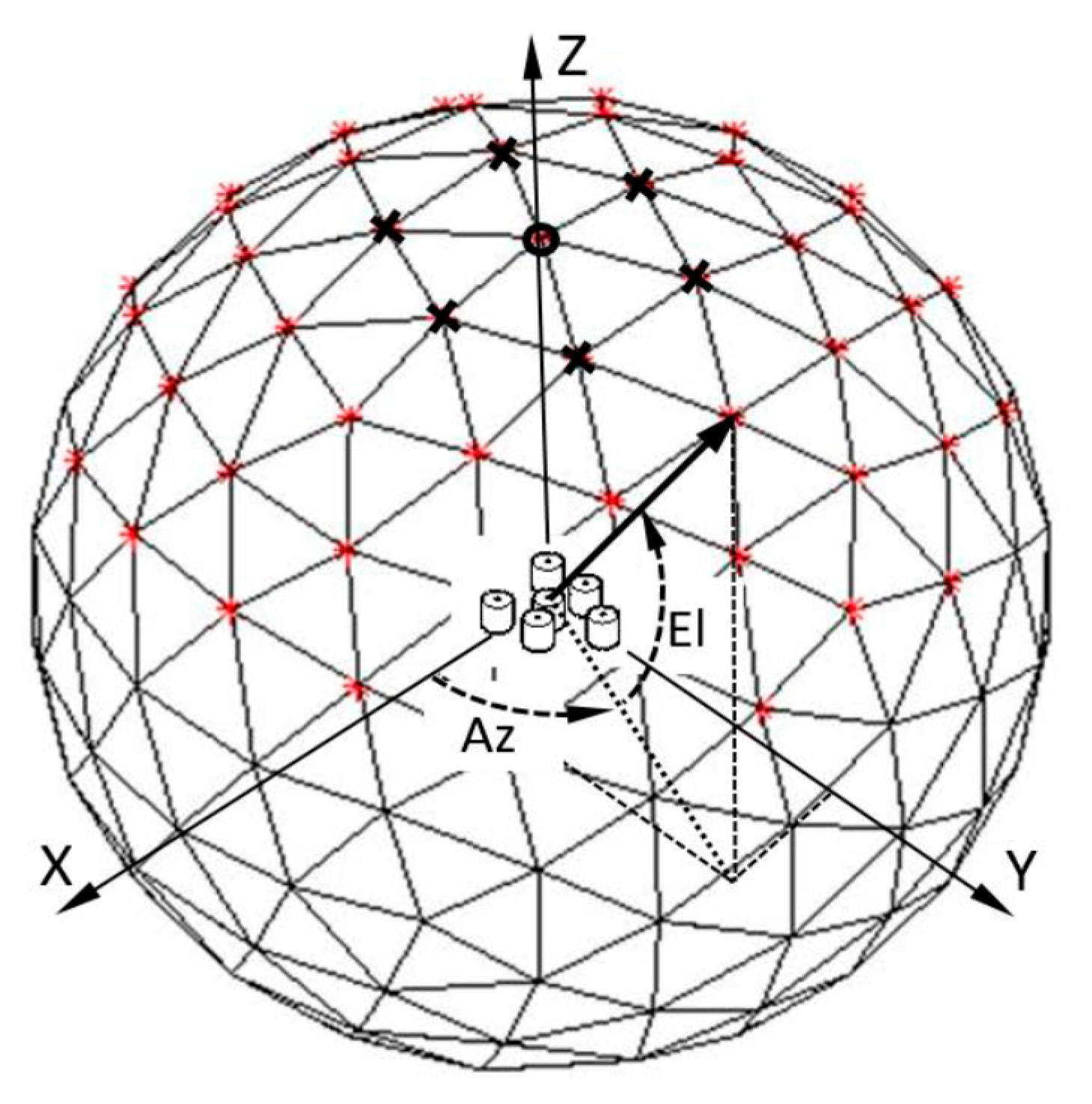
- It shows that (deg) has bigger estimation errors than that of other El-angles, especially for Az estimations at different frequencies. We believe that this is because of the Az-angles at this level were much closer to each other in the UV-sphere, as shown in Figure 6. Hence, when El-angle was closer to 90 (deg), the algorithm has more challenges to separate Az-angles, and the angular error of the antenna positioner has more influence on AoA measurement results.
- The data also show that the hardware gives better AoA estimations in the to (deg) range than those of lower El-angles. It is because the problem discussed in the last item is relaxed at these El-angles, and at lower El-angles, the array has a smaller effective aperture, and circular-polarization performance gets worse. One will see later that this effect was not reflected in the M&S, as the perfect circular-polarization was assumed. However, had the measured CBSA circular-polarization data been available, the STK antenna model could have been properly adopted into the M&S.
- Since the CBSA antenna has wider antenna beamwidth at a lower frequency than that at a higher frequency, the measurement results show that:
- ○
- AoA measurement can be conducted from 30 to 90 (deg) in El at 2 GHz.
- ○
- Up to 7 (GHz), the AoA can be estimated when El reaches 40 (deg). The system cannot give the right measurements at (deg). Thus data at (deg) will not be included in the following calculations.
- ○
- At higher frequencies, the AoA measurement can only perform El at about 50 (deg), and the system cannot produce any accurate measurements at and (deg). Hence, the data at and (deg) will not be included in the following calculations.
- Measurements were repeated at 16 (GHz), and the results had good consistency, as shown in Figure 12.
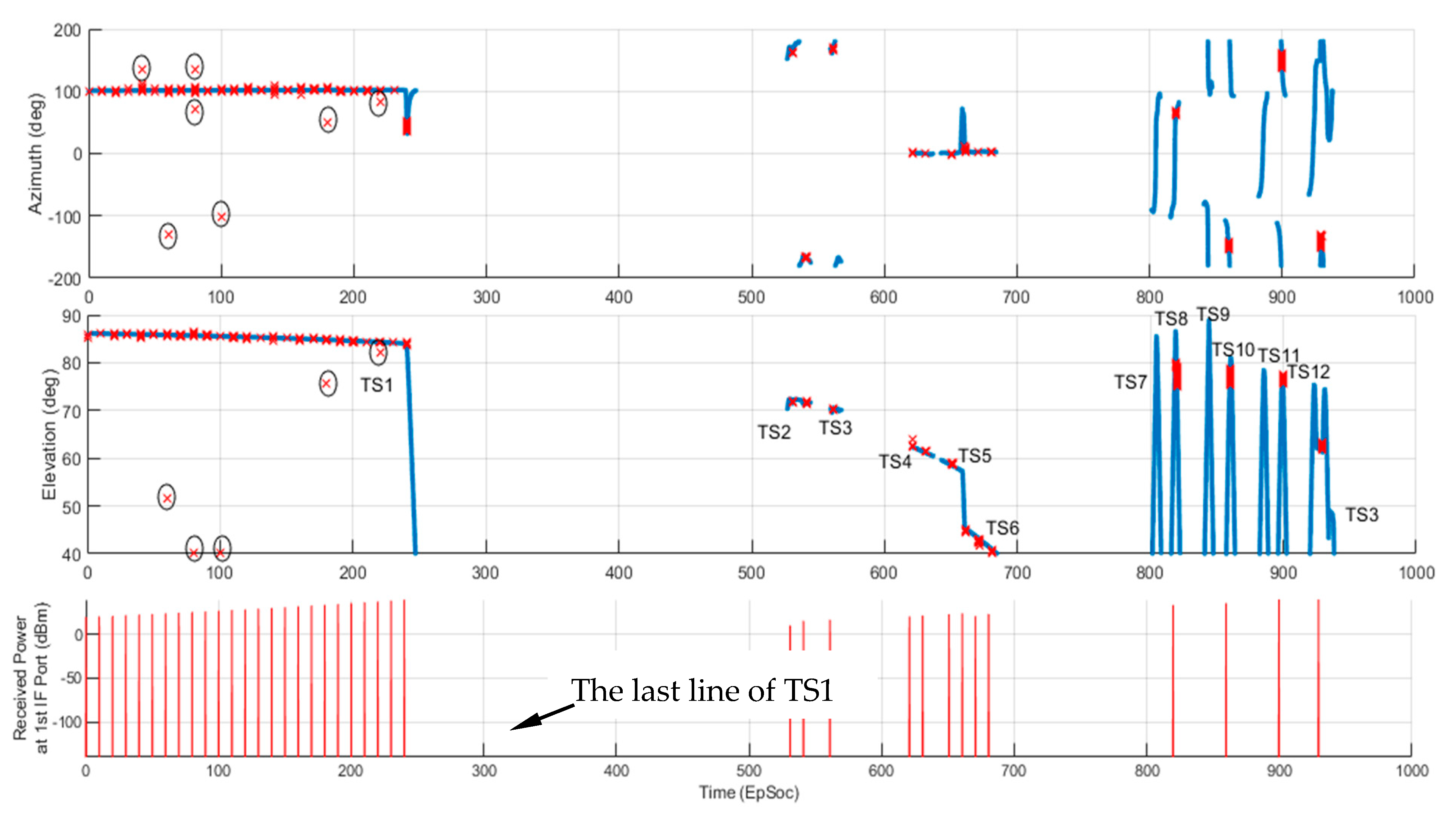
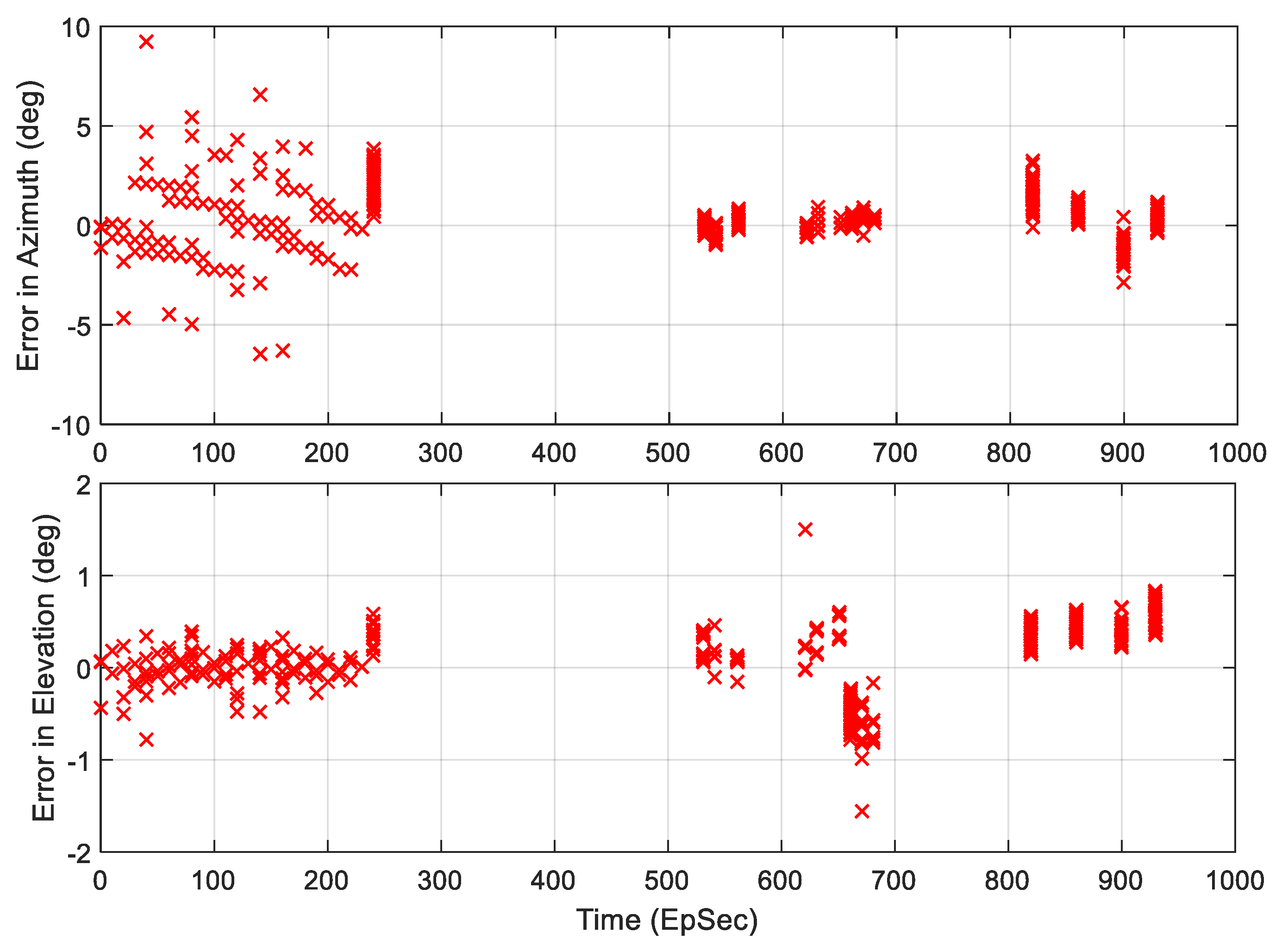
5.2. RF HF-M&S Results of the TAR Signal Direction Estimation by the Airborne AoA Measurement System
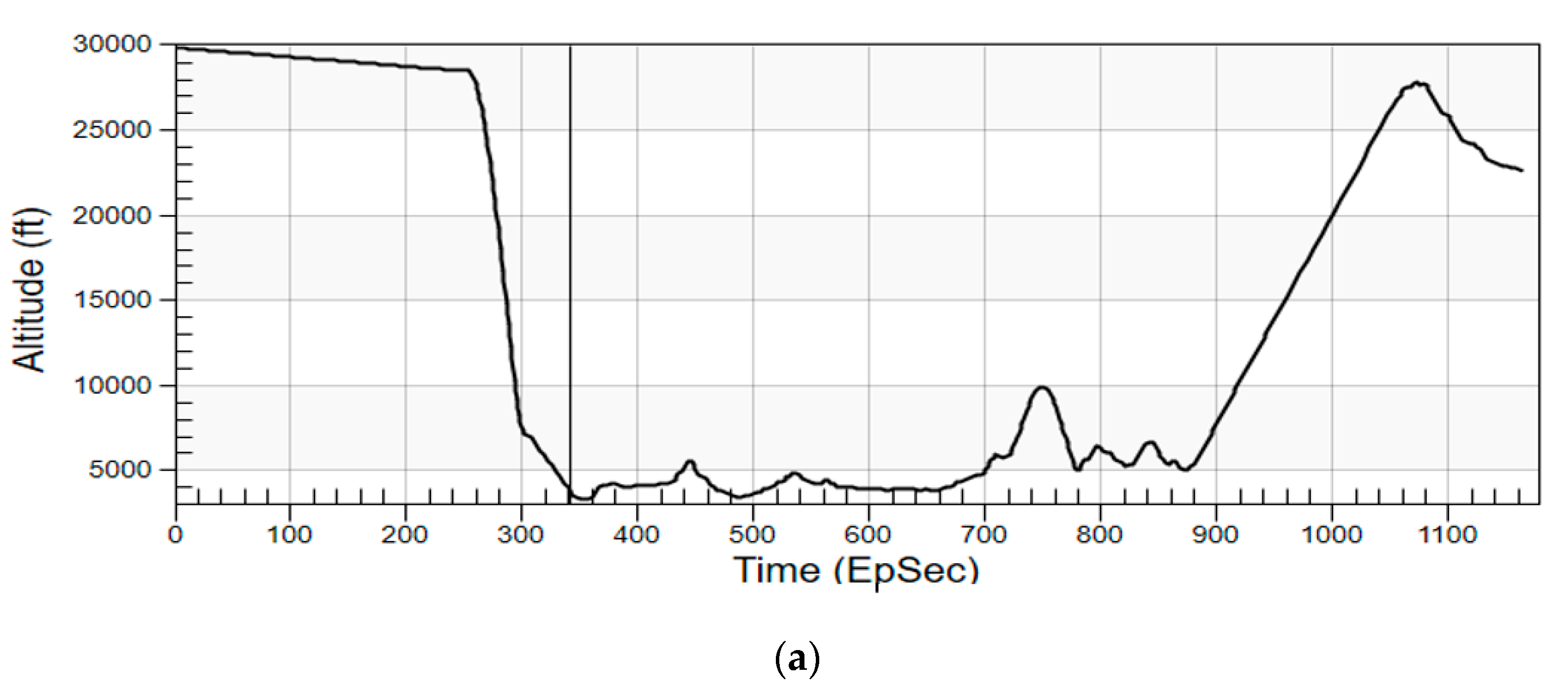
- The received signal power level follows the radiation pattern of the TAR antenna when the beam scans through the aircraft.
- The RESM receiver can measure the signal’s AoA even using the TAR antenna side-lobes, since there is only one-way wave propagation from TAR antenna to RESM receiving antennas.
- Although during TAR side-lobe scanning through the aircraft, the IF signal can be as low as about -90 (dBm), the receiver still can estimate TAR signal’s AoA. This is because the IF signal of each channel is processed by the AGC circuit, and 2048-point I/Q data FFT are used in the AoA estimation.
- The received IF power plot is also formed by many lines as shown in the bottom plot of Figure 15. The width of those lines is equal to the PW of the TAR. The time between lines is equal to the radar pulse repetition interval. The main lobe and one of these lines is detailed in Figure 16, which shows the RF HF-M&S is a waveform-level REW M&S.
5.3. RF HF-M&S Results of AoA Estimation at Other Frequencies between 2 to 18 (GHz)
6. Conclusions
- The CS-based AoA measurement system can be operated from 2 to 18 (GHz);
- The estimation error increases when it operates at lower frequencies;
- The system has better angle estimation in the El-angle than that in the Az-angle;
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Brief on the RF HF-M&S for REW Engagement Study
- It preserves signals’ fidelity from their generation in TXs to the signal processing in RXs at waveform-level;
- The simulation rates are determined by the nature of different RF/microwave and electronic systems, which normally relate to the signal bandwidths. This means it is a true multi-rate RF M&S;
- It models REW problem in spatial-, time-, and frequency-domains (including Doppler frequency) with consideration of the RF/microwave system impairments acting on the signals, and
- As mentioned earlier, the signal amplitude, phase (propagation delay), and Doppler/frequency are changed at each sample in the simulation. More on this will be shown in Appendix B.
Appendix B. Detail SVE Models in TAR and 6-Channel RESM Receiver
Appendix B.1. TAR TX Model



Appendix B.2. Six Sets of EM Wave Propagation Channel Data


Appendix B.3. RESM RX Model


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| f_IF (MHz) | f_LO (MHz) | IF_BW (MHz) | RF_BW (MHz) | LO_PW (dBm) | IF_ Gain1 (dB) | IF_ Gain2 (dB) | LNA_NF (dB) |
|---|---|---|---|---|---|---|---|
| 100 | 3480 | 60 | 80 | 13 | 20 | 25 | 2.1 |




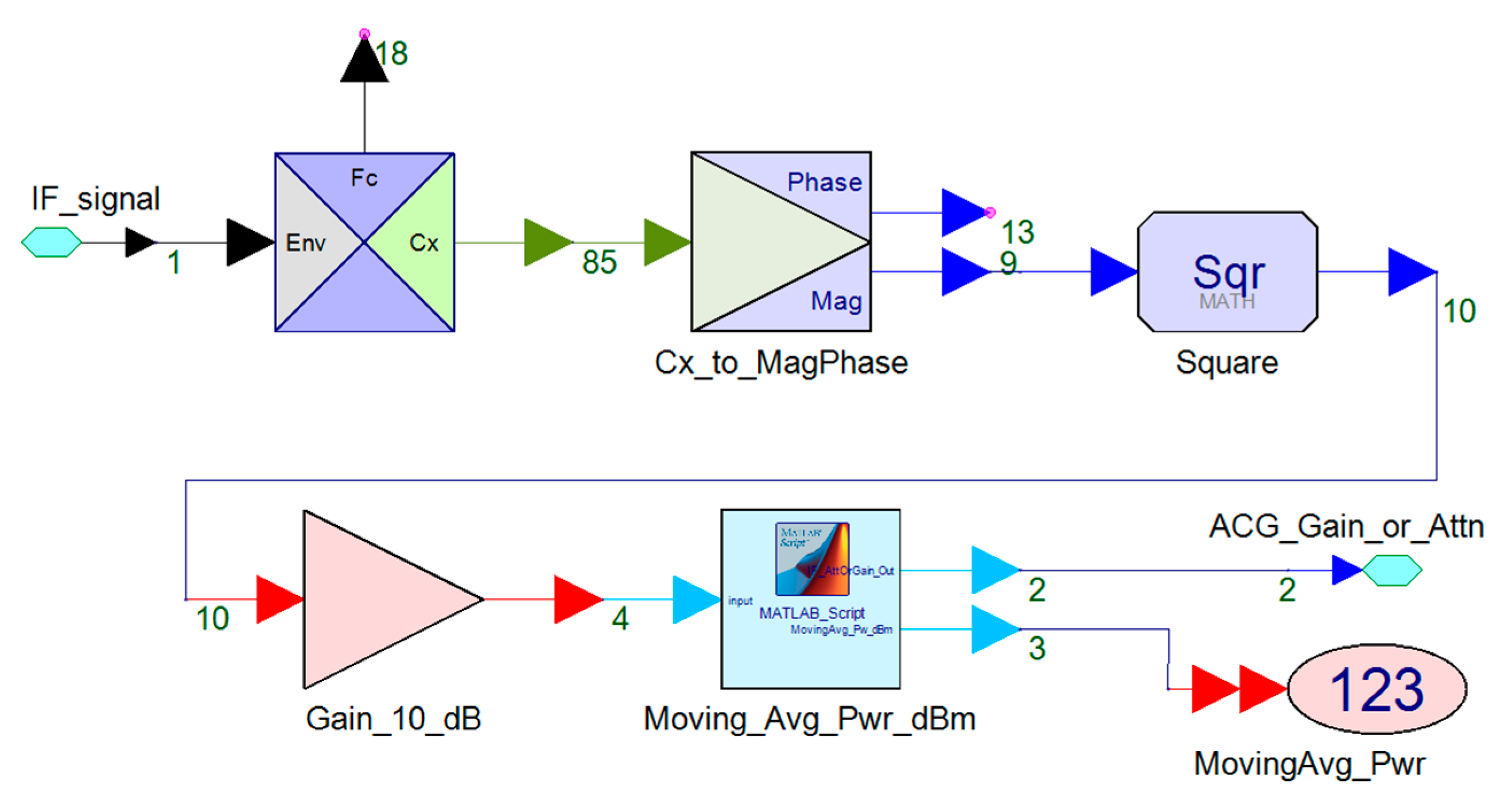
Appendix B.4. Automatic Gain Control (AGC) and Analog to Digital Converter (ADC)


Appendix C. Acronym List
| 2D | Two-dimensional |
| AoA | Angle of Arrival |
| ADC | Analog to Digital Converter |
| AGC | Automatic Gain Control |
| ASV | Array Steering Vector |
| Az | Azimuth |
| BB | Base Band |
| BW | Bandwidth or Beamwidth |
| CBSA | Cavity Backed Spiral Antenna |
| CS | Compressive Sensing |
| DF | Direction Finding |
| El | Elevation |
| EM | Electromagnetic |
| EpSec | Epoch Second |
| ESPIRT | Estimation of Signal Parameters Via Rotation Invariance Techniques |
| FFT | Fast Fourier Transform |
| FOV | Field of View |
| H/V | Horizontal/Vertical |
| IF | Intermediate Frequency |
| IG | Information Geometry |
| LO | Local Oscillator |
| LOS | Line of Sight |
| M&S | Modeling and Simulation |
| MIMO | Multiple-Input Multiple-Output |
| MUSIC | Multiple Signal Classification |
| NF | Noise Figure |
| PC-PC | Phase-Continuous and Phase-Coherent |
| PRF | Pulse Repetition Frequency |
| PW | Pulse Width |
| PXIe | PCI Express Extension for Instrumentation |
| RESM | Radar Electronic Support Measures |
| REW | Radar Electronic Warfare |
| RF | Radio Frequency |
| RF HF-M&S | RF High-Fidelity M&S |
| RMSE | Root Mean Square Error |
| RPM | Revolutions per Minute |
| RSA | Randomly Spaced Array |
| Rx or RX | Receiver |
| SNR | Signal to Noise Ratio |
| SOI | Signal of Interest |
| STK | System Tool Kit |
| SVE | SystemVue |
| TAR | Target Tracking Radar |
| TS | Time Slot |
| TTR | Target Tracking Radar |
| Tx or TX | Transmitter |
References
- Pace, P.E. Detecting and Classifying Low Probability of Intercept Radar, 2nd ed.; Artech House: Boston, MA, USA, 2009. [Google Scholar]
- Wiley, R. ELINT—The Interception and Analysis of Radar Signals; Artech House: Boston, MA, USA, 2006. [Google Scholar]
- Neri, F. Introduction to Electronic Defence Systems, 2nd ed.; Artech House: Boston, MA, USA, 2006; pp. 324–330. [Google Scholar]
- Vakin, S.A.; Shustov, L.N.; Dunwell, R.H. Fundamentals of Electronic Warfare; Artech House: Boston, MA, USA, 2001. [Google Scholar]
- Jacobs, E.A.; Ralston, E.W. Ambiguity resolution in interferometry. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 766–780. [Google Scholar] [CrossRef]
- Pasala, K.; Penno, R.; Schneider, S. Novel wideband multimode hybrid interferometer system. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1396–1406. [Google Scholar] [CrossRef]
- Moghaddasi, J.; Djerafi, T.; Wu, K. Multiport interferometer-enabled 2-D angle of arrival (AOA) estimation system. IEEE Trans. Microw. Theory Tech. 2017, 65, 1767–1779. [Google Scholar] [CrossRef]
- Tsui, J.B.Y. Microwave Receivers with Electronic Warfare Applications; John Wiley & Sons: New York, NY, USA, 1986; pp. 94–108. [Google Scholar]
- Holder, E.J. Angle-of-Arrival Estimation Using Radar Interferometry—Methods and Application; Scitech Publishing: Edison, NJ, USA, 2014. [Google Scholar]
- Lipsky, E.S. Microwave Passive Direction Finding; Scitech Publishing, Inc.: Raleigh, NC, USA, 2004. [Google Scholar]
- De Martino, A. Introduction to Modern EW Systems; Artech House: Boston, MA, USA, 2012. [Google Scholar]
- Chandran, S. Advances in Direction-of-Arrival Estimation; Artech House: Boston, MA, USA, 2006. [Google Scholar]
- Tuncer, T.E.; Friedlander, B. Classical and Modern Direction-of-Arrival Estimation; Academic Press: Burlington, MA, USA, 2009. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, W.; Huang, Y.; Liu, S. Decoupled 2-D direction of arrival estimation in L-shaped array. IEEE Commun. Lett. 2017, 21, 1989–1992. [Google Scholar] [CrossRef]
- Asif, M.A.G.R.; Al-Yasir, Y.I.A.R.; Abd-Alhameed, A.; Excell, P.S. AOA Localization for vehicle-tracking systems using a dual-band sensor array. IEEE Trans. Antennas Propag. 2020, 68, 6330–6345. [Google Scholar]
- Shi, H.P.; Leng, W.; Guan, Z.W.; Jin, T.Z. Two novel two-stage direction of arrival estimation algorithms for two-dimensional mixed noncircular and circular sources. Sensors 2017, 17, 1433. [Google Scholar] [CrossRef]
- Wu, Y.; Liao, G.S.; So, H.C. A fast algorithm for 2-D directional-of-arrival estimation. Signal Process. 2003, 83, 1827–1831. [Google Scholar] [CrossRef]
- van der Veen, A.J. Asymptotic properties of the algebraic constant modulus algorithm. IEEE Trans. Signal Process. 2001, 49, 1796–1807. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, H.; Chen, H.; Dong, Y.Y.; Wang, L.H. Complexity method for two-dimensional direction-of-arrival estimation using an L-shaped array. Sensors 2017, 17, 190. [Google Scholar] [CrossRef]
- Gershman, A.B.; Rubsaman, M.; Pesavento, M. One- and two-dimensional direction-od-arrival estimation, an overview for search-free techniques. Signal Process. 2010, 90, 1338–1349. [Google Scholar] [CrossRef]
- Al-Jazzar, S.O.; Hamici, Z.; Aldalahmeh, S. Tow-dimensional AOA estimation based on a constant modulus algorithm. Int. J. Antennas Propag. 2017, 2017, 3214021. [Google Scholar] [CrossRef]
- Lonkeng, A.D.; Zhuang, J. Two-dimensional DOA estimation using arbitrary arrays for massive MIMO systems. Int. J. Antennas Propag. 2017, 2017, 6794920. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.X.; Liu, W.; Liu, M.M.; Tang, Z.Z. Scaling transform based information geometry method for DOA Estimation. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3640–3650. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Wang, H.; Park, S.; Adve, R.; Koh, J.; Kim, K.; Zhang, Y.; Wicks, M.; Brown, R.D. A deterministic least-squares approach to space-time adaptive processing (STAP). IEEE Trans. Antennas Propag. 2001, 49, 91–103. [Google Scholar] [CrossRef]
- Kim, K.; Sarkar, T.K.; Palma, M.S. Adaptive processing using a single snapshot for a nonuniformly spaced array in the presence of mutual coupling and near-field scatterers. IEEE Trans. Antennas Propag. 2002, 50, 582–590. [Google Scholar]
- Sarkar, T.K.; Schwarzlander, H.; Choi, S.; Palma, M.S.; Wicks, M.C. Stochastic versus deterministic models in the analysis of communication systems. IEEE Antennas Propag. Mag. 2002, 44, 40–50. [Google Scholar] [CrossRef]
- Sarkar, T.K.; Wicks, M.C.; Salazar-Palma, M.; Bonneau, R.J. Smart Antennas; IEEE Press: New Jersey, NJ, USA, 2003. [Google Scholar]
- Zhang, P.; Li, J.; Zhou, A.Z.; Xu, H.B.; Bi, J. A robust direct data domain least squares beamforming with sparse constraint. Prog. Electromagn. Res. C 2013, 43, 53–65. [Google Scholar] [CrossRef][Green Version]
- Wu, C.; Elangage, J. Nonuniformly spaced array with the Direct Data Domain method for 2D angle-of-Arrival measurement in electronic support measures application from 6 to 18 GHz. Int. J. Antennas Propag. 2020, 2020, 9651650. [Google Scholar] [CrossRef]
- Stove, A.G.; Hume, A.L.; Baker, C.J. Low probability of intercept radar strategies. IEE Proc.—Radar Sonar Navig. 2004, 151, 249–260. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Decoding by linear programming. IEEE Trans. Inf. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Conde, M.H. Compressive Sensing for the Photonic Mixer Device: Fundamentals, Methods and Results; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Han, Z.; Li, H.; Yin, W. Compressive Sensing for Wireless Networks; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Wu, C.; Elangage, J. 2D-angle of arrival estimation using signal spatial sparsity and Dantzig selector. Def. Res. Dev. Can. Sci. Rep. 2019. DRDC-RDDC-2019-R079. [Google Scholar]
- Wu, C.; Elangage, J. Multi-emitter Two-Dimensional Angle-of-Arrival Estimator via Compressive Sensing. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2884–2895. [Google Scholar] [CrossRef]
- Gurbuz, A.C.; Cevher, V.; Mcclellan, J.H. Bearing Estimation via Spatial Sparsity using Compressive Sensing. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1358–1369. [Google Scholar] [CrossRef]
- Candes, E.; Tao, T. The Dantzig selector: Statistical estimation when p is much larger than n. Ann. Stat. 2007, 35, 2313–2351. [Google Scholar]
- Zhang, Z.; Rao, B.D. Sparse signal recovery with temporally correlated source vectors using sparse Bayesian learning. IEEE J. Sel. Top. Signal Process. 2011, 5, 912–926. [Google Scholar] [CrossRef]
- Rocca, P.; Hannan, M.A.; Salucci, M.; Massa, A. Single-snapshot DoA estimation in array antennas with mutual coupling through a multi-scaling BCS strategy. IEEE Trans. Antennas Propag. 2017, 65, 3203–3213. [Google Scholar] [CrossRef]
- Analytical Graphics, Inc. Available online: https://agi.com/products (accessed on 12 January 2021).
- Keysight Technologies, Inc. Available online: https://www.keysight.com/m/ca/en/products/software/pathwave-design-software.htm (accessed on 12 January 2021).
- Wikipedia The Free Encyclopedia, “Icosphere”. Available online: https://en.wikipedia.org/wiki/Icosphere (accessed on 11 May 2021).
- Ward, W.O.C. Icosphere, Generate Unit Geodesic Sphere Created by Subdividing a Regular Icosahedron. Available online: https://www.mathworks.com/matlabcentral/fileexchange/50105-icosphere?focused=3865223&tab=function (accessed on 11 May 2021).
- Li, X.; Yagoub, M.C. Wideband cavity-backed spiral antenna design and mutual coupling study in a closely-spaced array. In Proceedings of the 18th Symposium on Antenna Technology and Applied Electromagnetics (ANTEM), Session TU3B: SS: Research on Antenna for Defence and Security Applications, Waterloo, ON, Canada, 19–22 August 2018. [Google Scholar]
- Candes, E.; Romberg, J. l1-Magic: Recovery of Sparse Signals via Convex Programming. Available online: https://statweb.stanford.edu/~candes/l1magic/ (accessed on 12 May 2021).
- TECOM Smith Microwave, Planar Cavity-Backed Spiral Antennas. Available online: https://www.smithsinterconnect.com/products/defence-antenna-systems/wideband-antennas/planar-cavity-backed-spiral-antennas/ (accessed on 23 September 2021).
- L3Harris, Dual-Polarized Quad-Ridged Horn Antenna. Available online: https://www.l3harris.com/all-capabilities/48461-series-dual-polarized-quad-ridged-horn-antenna (accessed on 23 September 2021).
- Keysight Technologies Inc. X-Series Agile Signal Generators (UXG). Available online: https://www.keysight.com/en/pcx-x205221/x-series-agile-signal-generators-uxg?cc=CA&lc=eng (accessed on 25 November 2019).
- Keysight Technologies Inc. M8121A 12 GSa/s Arbitrary Waveform Generator. Available online: https://www.keysight.com/en/pd-2959357-pn-M8121A/12-gsa-s-arbitrary-waveform-generator?cc=US&lc=eng (accessed on 3 March 2020).
- Van de Sande, F.; Lugil, N.; Demarsin, F.; Hendrix, Z.; Andries, A.; Brandt, P.; Anklam, W.; Patterson, J.S.; Miller, B.; Rytting, M.; et al. A 7.2 GSa/s, 14 Bit or 12 GSa/s, 12 Bit Signal Generator on a Chip in a 165 GHz fT BiCMOS Process. IEEE J. Solid-State Circuits 2012, 47, 1003–1012. [Google Scholar] [CrossRef]
- D’Agostino, S.; Foglia, G.; Pistoia, D. Specific emitter identification: Analysis on real radar signal data. In Proceedings of the 2009 European Radar Conference (EuRAD), Rome, Italy, 30 September–2 October 2009; pp. 242–245. [Google Scholar]
- Ding, L.; Wang, S.L.; Wang, F.G.; Zhang, W. Specific emitter identification via convolution neural networks. IEEE Commun. Lett. 2018, 22, 2591–2594. [Google Scholar] [CrossRef]
- Wu, C. Using Matlab/Simulink to Model and Simulate Electronic Support Measure FR/Microwave Receiver Front-End; DRDC Ottawa, TM-2010-071: Ottawa, ON, Canada, 2010. [Google Scholar]
- Wu, C.; Young, A. High-fidelity modeling and simulation for radar electronic warfare system concepts. In SPIE 2012 Defence Security + Sensing; SPIE: Baltimore, MD, USA, 23–27 April 2012; Volume 8403, p. 3. [Google Scholar]
- Wu, C.; Rajan, S.; Young, A.; O’Regan, C. RF/microwave system high-fidelity modeling and simulation: Application to airborne multi-channel receiver system for angle of arrival estimation. In Proceedings of the SPIE Defence Security + Sensing, Baltimore, ML, USA, 5–9 May 2014; Volume 9095, p. 5. [Google Scholar]

















| Element | X (mm) | Y (mm) |
|---|---|---|
| 1 | 0.0 | 0.0 |
| 2 | 79.96 | 71.90 |
| 3 | 68.48 | −37.65 |
| 4 | −34.95 | −125.35 |
| 5 | −94.05 | −14.55 |
| 6 | −96.05 | 99.34 |
| # | Module Names | Slot Number on M9018A PXIe Chassis |
|---|---|---|
| 1 | M9037A embedded controller | 1 |
| 2 | M3102A 500MS/s Digitizer | 4, 15 |
| 3 | M9352A Hybrid Amplifier/Attenuator | 5, 17 |
| 4 | M9362A-D01 Quad Down-converter | 6–8, 12–14 |
| 5 | M9300A Frequency Reference Source | 9 |
| 6 | SC5510A 20 GHz Signal Source | 11 |
| Time Slot | Start Time (EpSec) | Stop Time (EpSec) | Duration (S) |
|---|---|---|---|
| 1 | 0.000 | 247.019 | 247.019 |
| 2 | 526.702 | 544.506 | 17.804 |
| 3 | 559.238 | 567.701 | 8.463 |
| 4 | 620.557 | 636.605 | 16.048 |
| 5 | 642.757 | 652.396 | 9.639 |
| 6 | 654.336 | 684.557 | 30.221 |
| 7 | 801.536 | 808.044 | 6.508 |
| 8 | 815.711 | 822.204 | 6.493 |
| 9 | 840.821 | 847.328 | 6.507 |
| 10 | 857.084 | 863.601 | 6.517 |
| 11 | 882.224 | 888.674 | 6.450 |
| 12 | 896.106 | 902.506 | 6.400 |
| 13 | 920.115 | 938.209 | 18.094 |
| Freq (GHz) | TX Power (kW) | Pulse Repetition Freq (PRF) (Hz) | Pulse Width (PW) (usec) | Antenna Gain (dBi) | Antenna BW (H/V) (deg) | Main Beam Pointing to Sky (deg) | Sweep Rate (RPM) |
| 3.58 | 700 | 1000 | 2 | 34.77 | 2/20 | 10 | 6 |
| Freq (GHz) | RMSE in Az (deg) | RMSE in El (deg) | RMSE in Both Angles (deg) | Total Test/Used Data | Overall Performance in Diff. IEEE Frequency Bands (deg) |
|---|---|---|---|---|---|
| 2 | 4.46 | 2.44 | 3.60 | 78/64 | L-band: 3.60 |
| 3 | 2.98 | 1.79 | 2.46 | 65/55 | S-band: 2.74 (avg. of RMSE from 2 to 4 (GHz)) |
| 4 | 2.87 | 1.07 | 2.16 | 65/59 | |
| 5 | 1.21 | 1.00 | 1.11 | 65/56 | C-band: 1.16 (avg. of the RMSE from 4 to 8 (GHz)) |
| 6 | 1.38 | 0.78 | 1.12 | 65/57 | |
| 7 | 0.83 | 0.67 | 0.75 | 65/54 | |
| 8 | 0.67 | 0.68 | 0.68 | 52/52 | |
| 9 | 0.75 | 0.71 | 0.73 | 52/52 | X-band: 0.67 (avg. of the RMSE from 8 to 12 (GHz)) |
| 10 | 0.54 | 0.64 | 0.59 | 52/52 | |
| 11 | 0.66 | 0.70 | 0.68 | 52/52 | |
| 12 | 0.78 | 0.51 | 0.66 | 52/50 | |
| 13 | 0.57 | 0.26 | 0.45 | 52/52 | Ku-band: 0.56 (avg. of the RMSE from 12 to 18 (GHz)) |
| 14 | 0.58 | 0.51 | 0.55 | 52/52 | |
| 15 | 0.59 | 0.20 | 0.44 | 52/50 | |
| 16 | 0.62 | 0.37 | 0.51 | 104/101 | |
| 17 | 0.71 | 0.16 | 0.51 | 52/50 | |
| 18 | 1.05 | 0.43 | 0.81 | 52/46 |
| Freq (GHz) | Total Number of AoA Points Calculated | Number of Points Est. Error > 10 (deg) | Az and El (without Points Est. Error > 10 (deg)) | |
|---|---|---|---|---|
| 2.00 | 10891 | 26 | 2.42 | 1.42 |
| 3.58 | 8889 | 7 | 0.95 | 0.29 |
| 7.12 | 6941 | 4 | 0.83 | 0.11 |
| 10.13 | 6152 | 4 | 0.88 | 0.20 |
| 13.17 | 5525 | 5 | 0.71 | 0.10 |
| 15.13 | 5233 | 7 | 0.79 | 0.30 |
| 18.00 | 4655 | 5 | 0.77 | 0.08 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Krishnasamy, D.; Elangage, J. Hardware Implementation and RF High-Fidelity Modeling and Simulation of Compressive Sensing Based 2D Angle-of-Arrival Measurement System for 2–18 GHz Radar Electronic Support Measures. Sensors 2021, 21, 6823. https://doi.org/10.3390/s21206823
Wu C, Krishnasamy D, Elangage J. Hardware Implementation and RF High-Fidelity Modeling and Simulation of Compressive Sensing Based 2D Angle-of-Arrival Measurement System for 2–18 GHz Radar Electronic Support Measures. Sensors. 2021; 21(20):6823. https://doi.org/10.3390/s21206823
Chicago/Turabian StyleWu, Chen, Denesh Krishnasamy, and Janaka Elangage. 2021. "Hardware Implementation and RF High-Fidelity Modeling and Simulation of Compressive Sensing Based 2D Angle-of-Arrival Measurement System for 2–18 GHz Radar Electronic Support Measures" Sensors 21, no. 20: 6823. https://doi.org/10.3390/s21206823
APA StyleWu, C., Krishnasamy, D., & Elangage, J. (2021). Hardware Implementation and RF High-Fidelity Modeling and Simulation of Compressive Sensing Based 2D Angle-of-Arrival Measurement System for 2–18 GHz Radar Electronic Support Measures. Sensors, 21(20), 6823. https://doi.org/10.3390/s21206823