Hip Positioning and Sitting Posture Recognition Based on Human Sitting Pressure Image




Abstract
1. Introduction
- A sitting pressure image acquisition system is designed, which can conveniently and effectively collect the human sitting pressure image.
- An innovative hip positioning algorithm based on hip templates is proposed. The algorithm can effectively locate the hip position by using the human sitting pressure image and can adapt to the sitting posture with different angles.
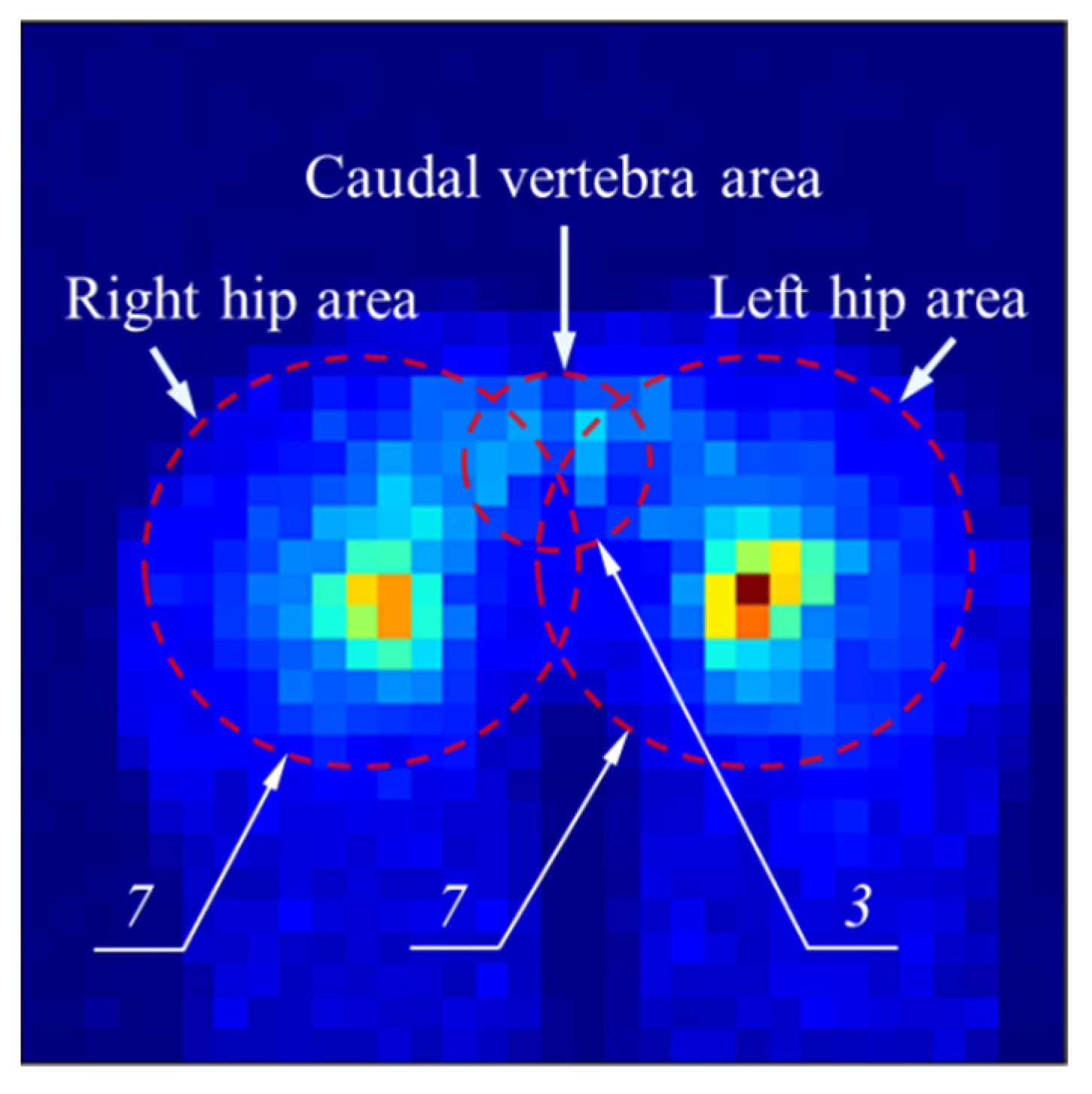
- Based on the above hip positioning technology, this paper effectively extracts the pressure values of the left hip area, right hip area and caudal area as features. It also explores the optimal parameters of SVM with polynomial kernel, Gaussian kernel and Sigmoid kernel for the classification of four types of sitting postures.
2. Materials and Methods
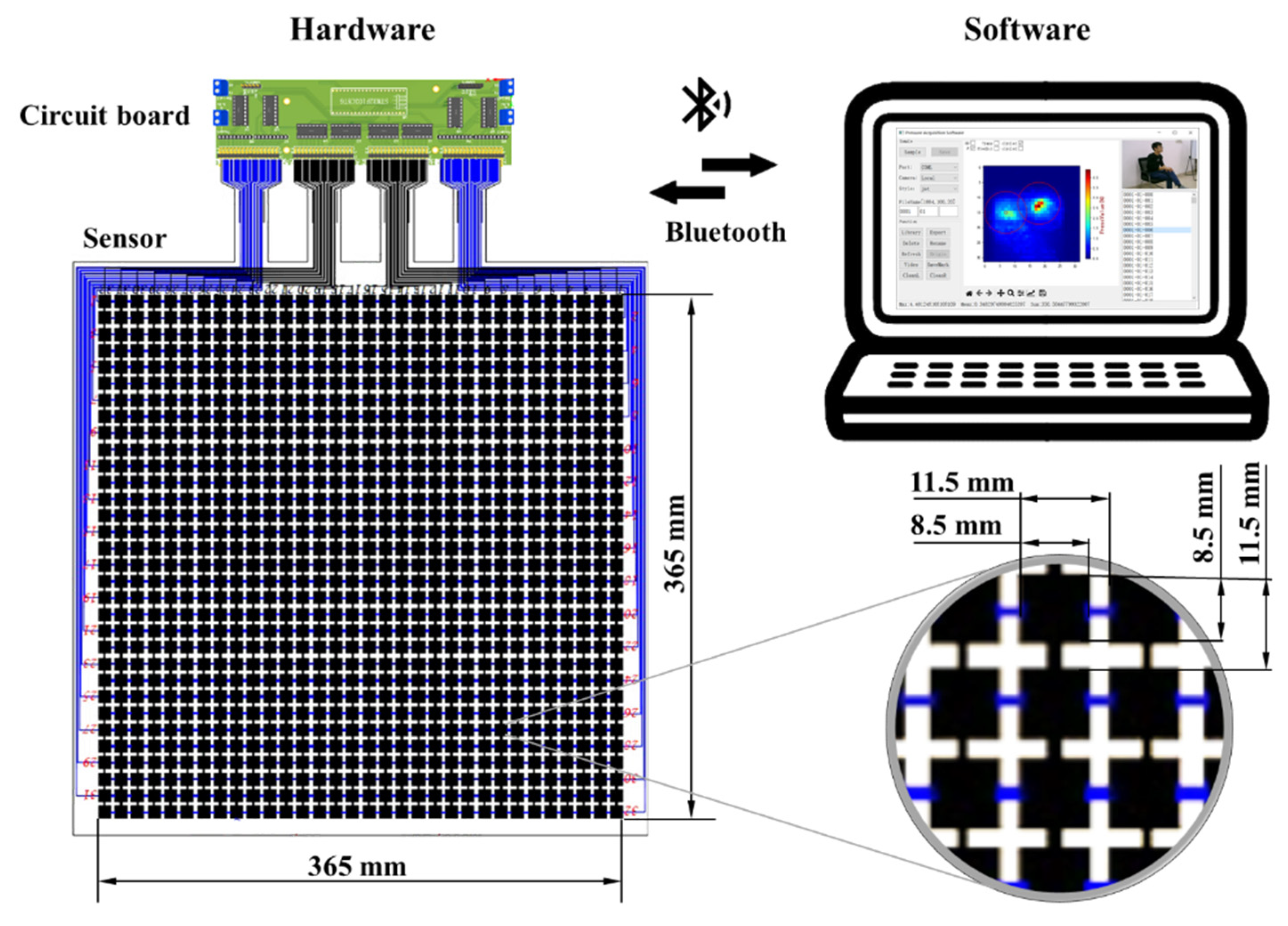
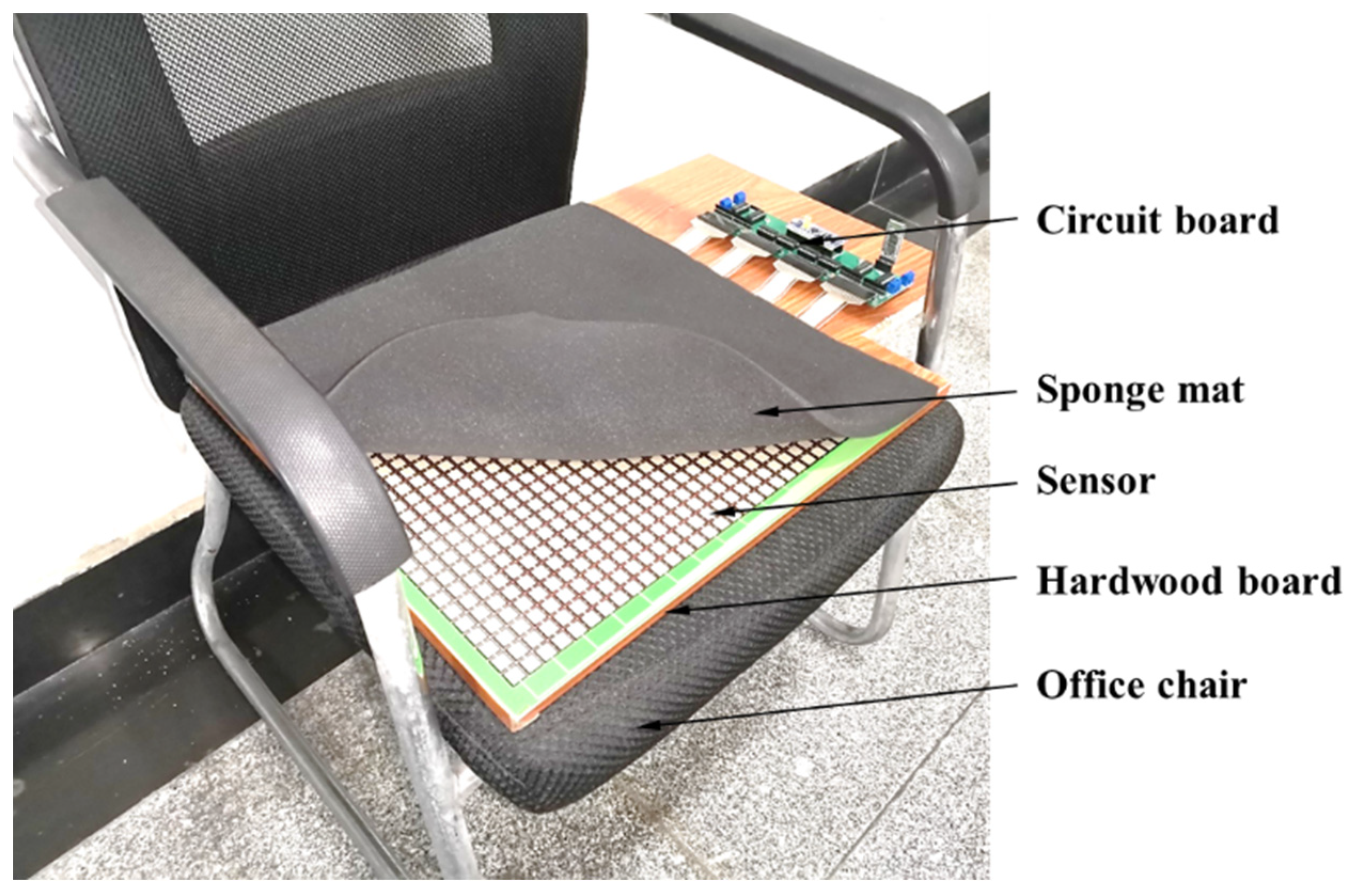
2.1. System
2.2. Data Acquisition and Marking
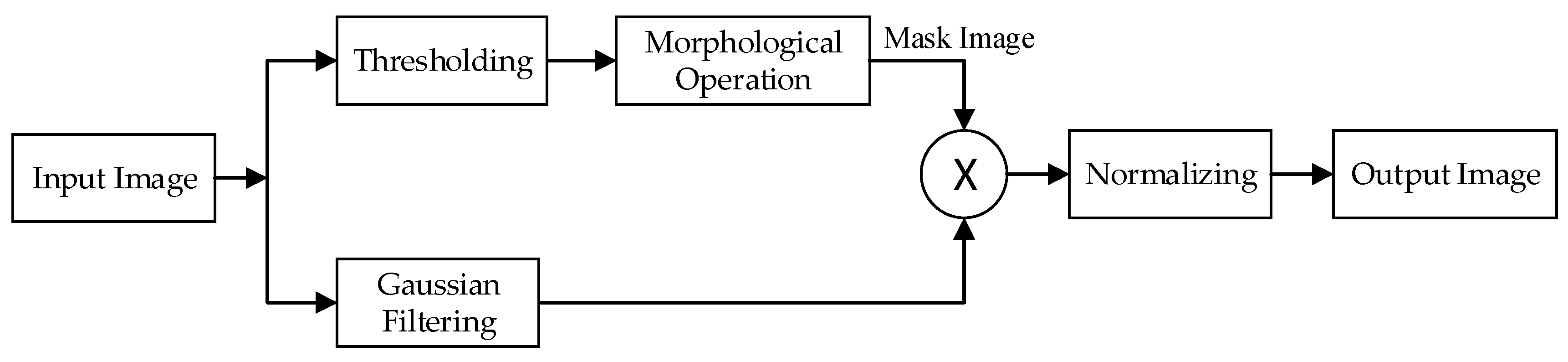
2.3. Data Preprocessing
2.4. Hip Positioning Algorithm Based on Hip Templates
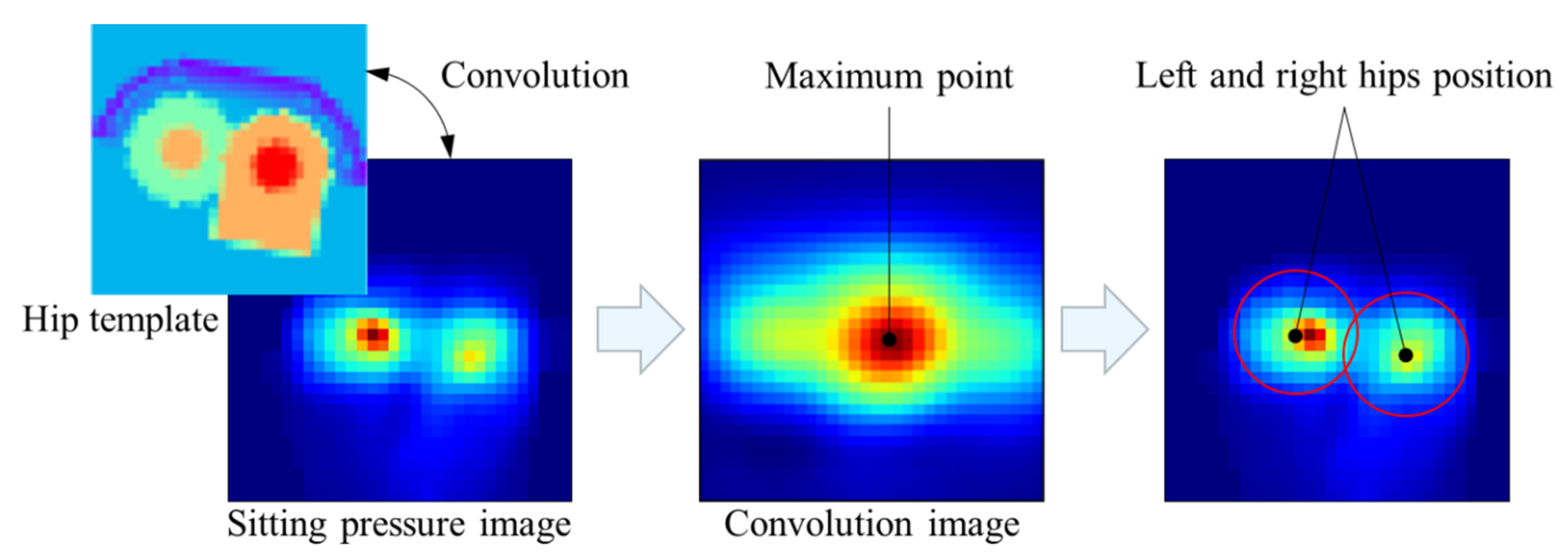
2.4.1. Principle of the Algorithm
- Using the hip template to convolve the sitting pressure image to get the convolution image.
- Finding the position of the maximum point in the convolution image, which will be considered as the best position.
- Calculating the position of the left and right hips from the position of the maximum point and the size of the template.
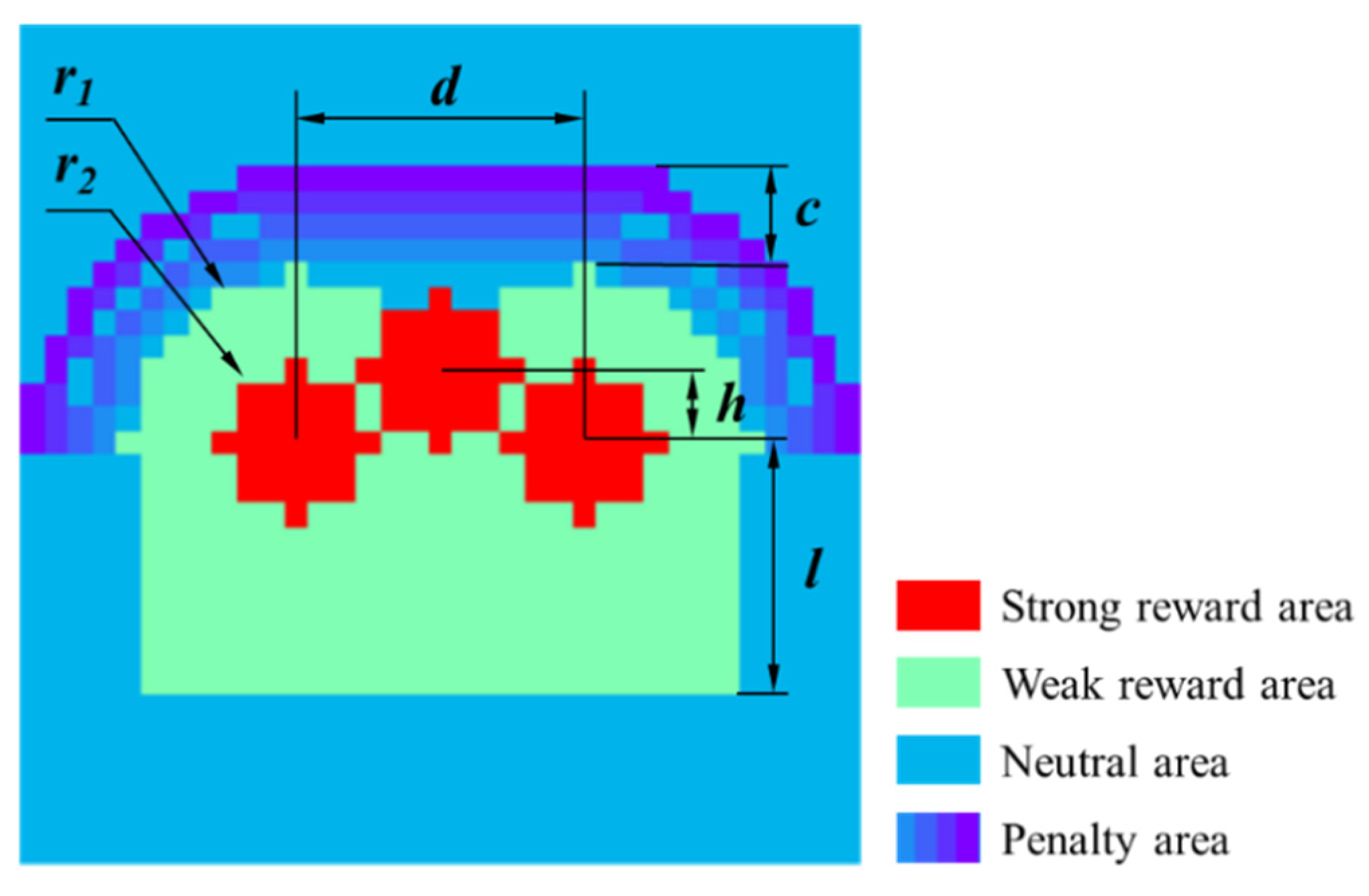
2.4.2. The Design of Hip Templates
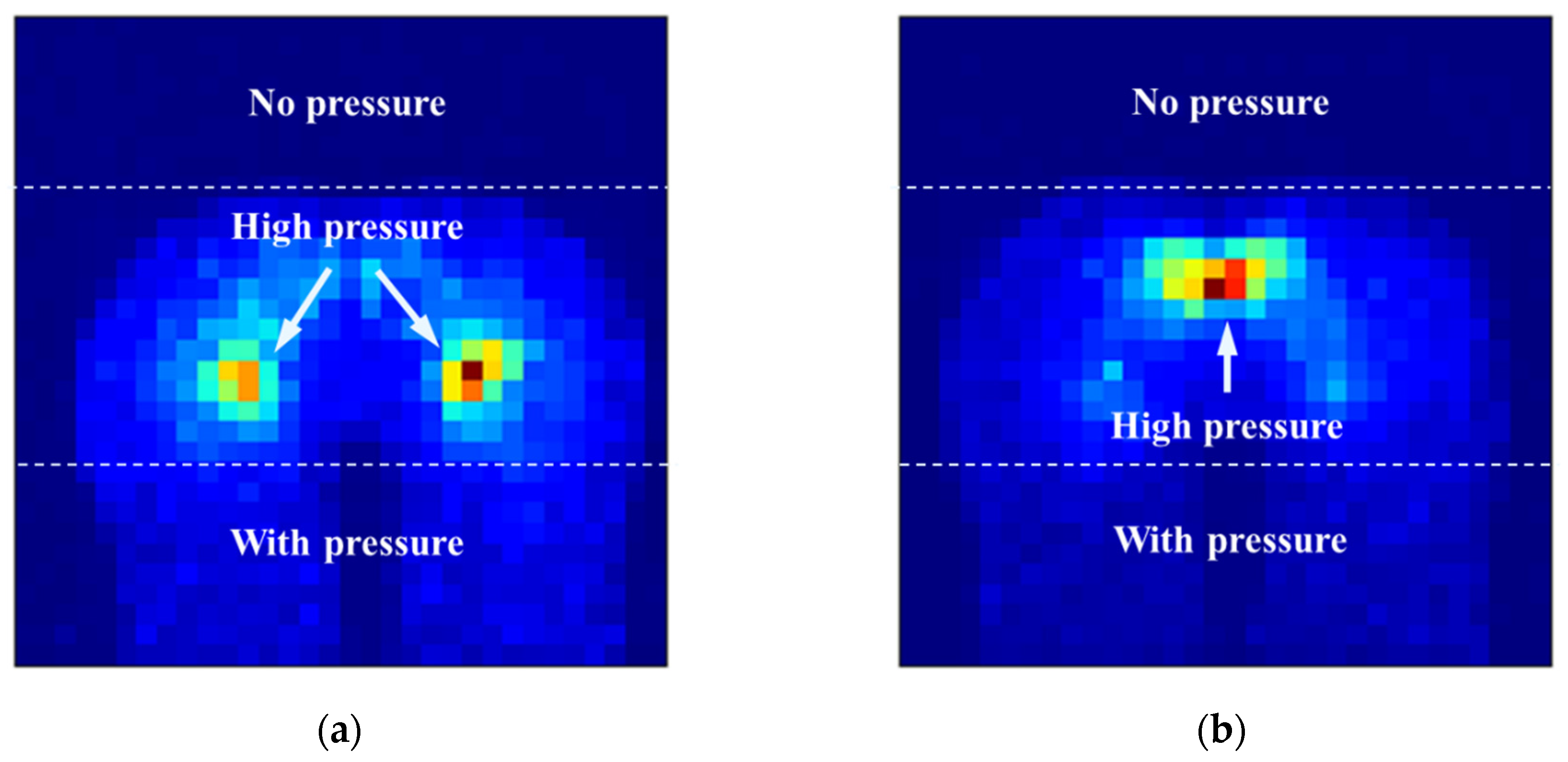
- The central area of the left and right hips and the area of the caudal vertebra are often high-pressure areas; and
- There is pressure in the front of the hips, and no pressure in the rear of the hips.
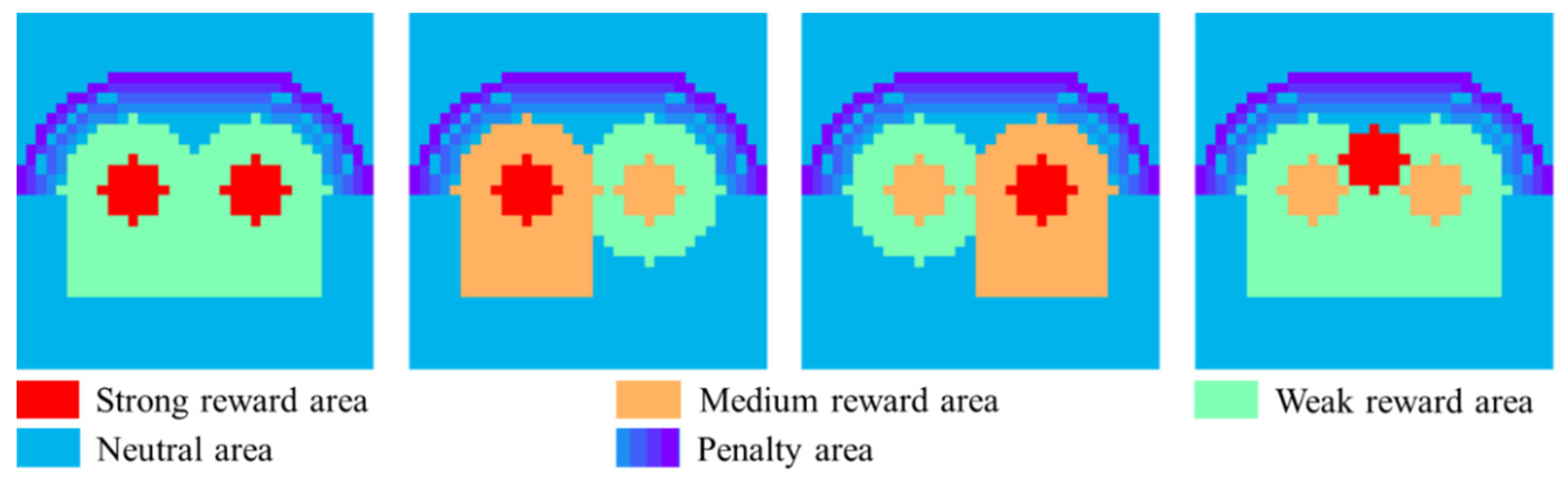
- With reference to the first template, the pixel values of the reward areas of the remaining three templates are scaled equally so that the sum of the pixel values of the reward areas of the four templates are the same. The purpose is to ensure that each template has the same weight in the process of convolution.
- To locate the hip position of the sitting posture with different rotation angles, the four templates are rotated in the same way. Since it is almost impossible for a person to sit on an office chair with armrests with a rotation angle greater than 40°, the rotation range is set from −40° to 40°. The specific rotation angles include −40°, −30°, −20°, −10°, 0°, 10°, 20°, 30° and 40°. Therefore, the final number of templates is 36.
2.4.3. The Process of Hip Positioning
- Using Equation (2) to weaken the pressure image.
- The pressure image is convolved with the 36 templates respectively to obtain 36 convolution images.
- Finding the position of the maximum value and the angle of the corresponding template in 36 convolution images and taking them as the best predicted position and angle.
- Calculating the position of the left hip and the right hip via the best predicted position and angle.
2.4.4. Parameters Optimization
2.5. Sitting Posture Recognition
2.5.1. Features Selection and Processing
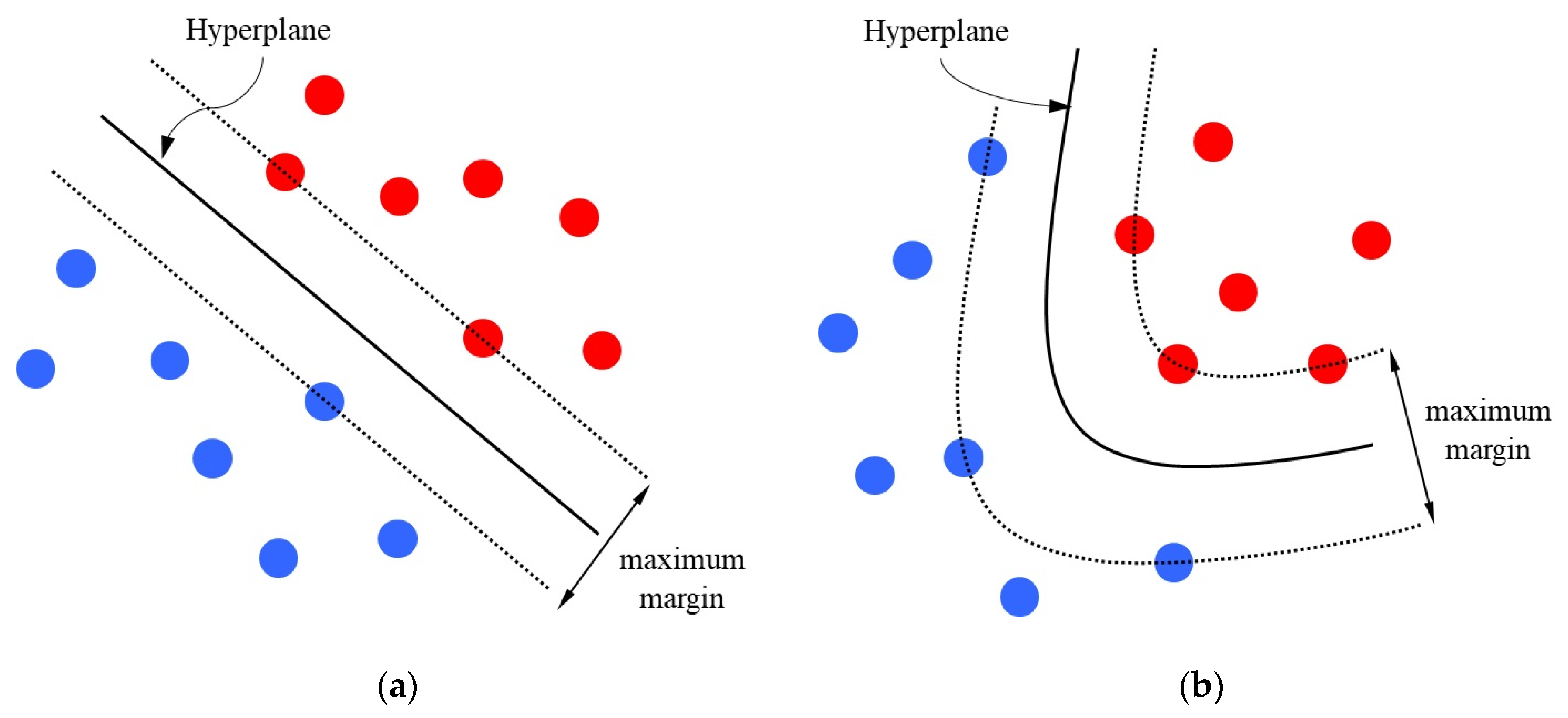
2.5.2. Classification
3. Results and Discussion
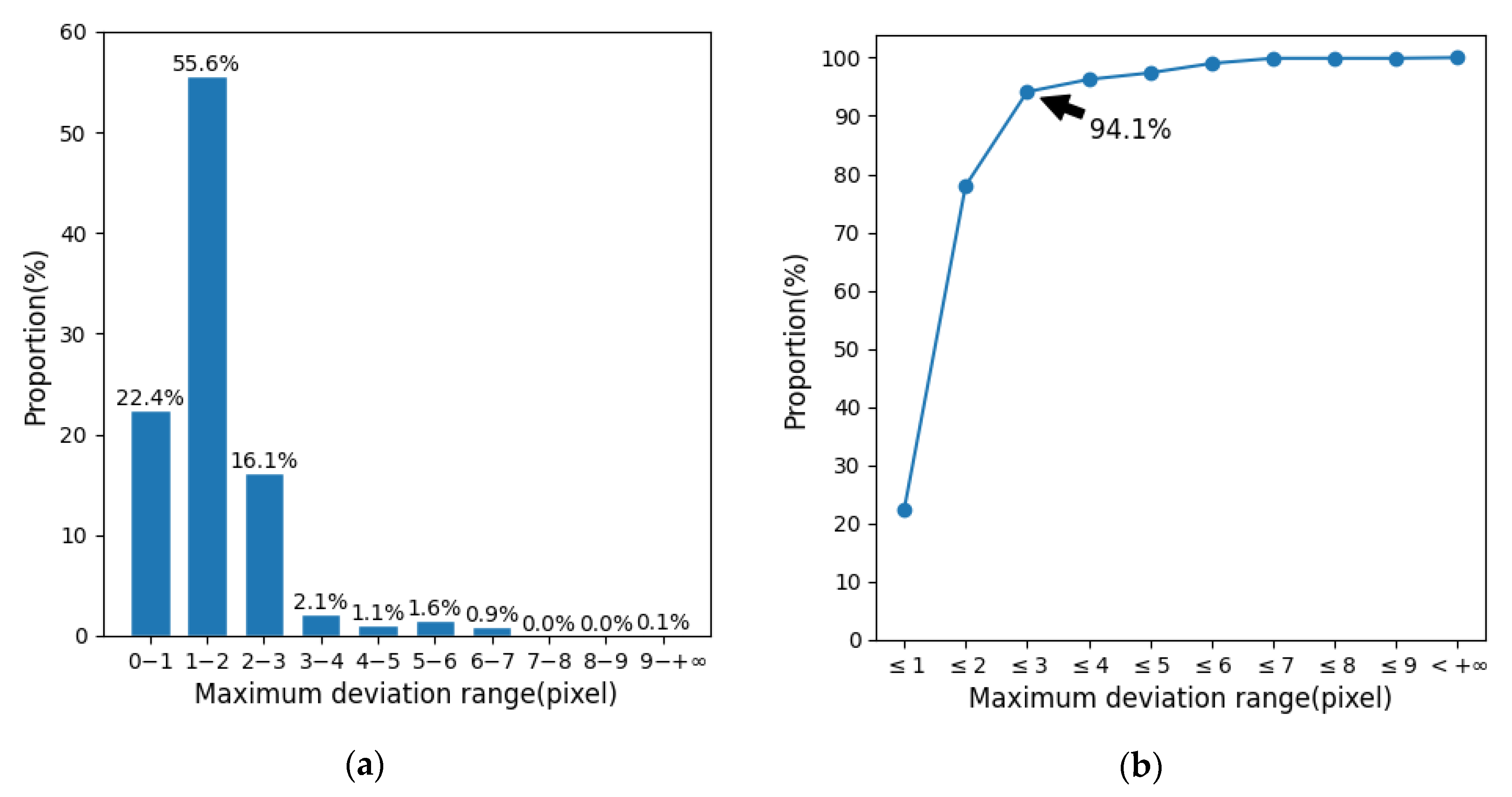
3.1. The Effect of Hip Positioning
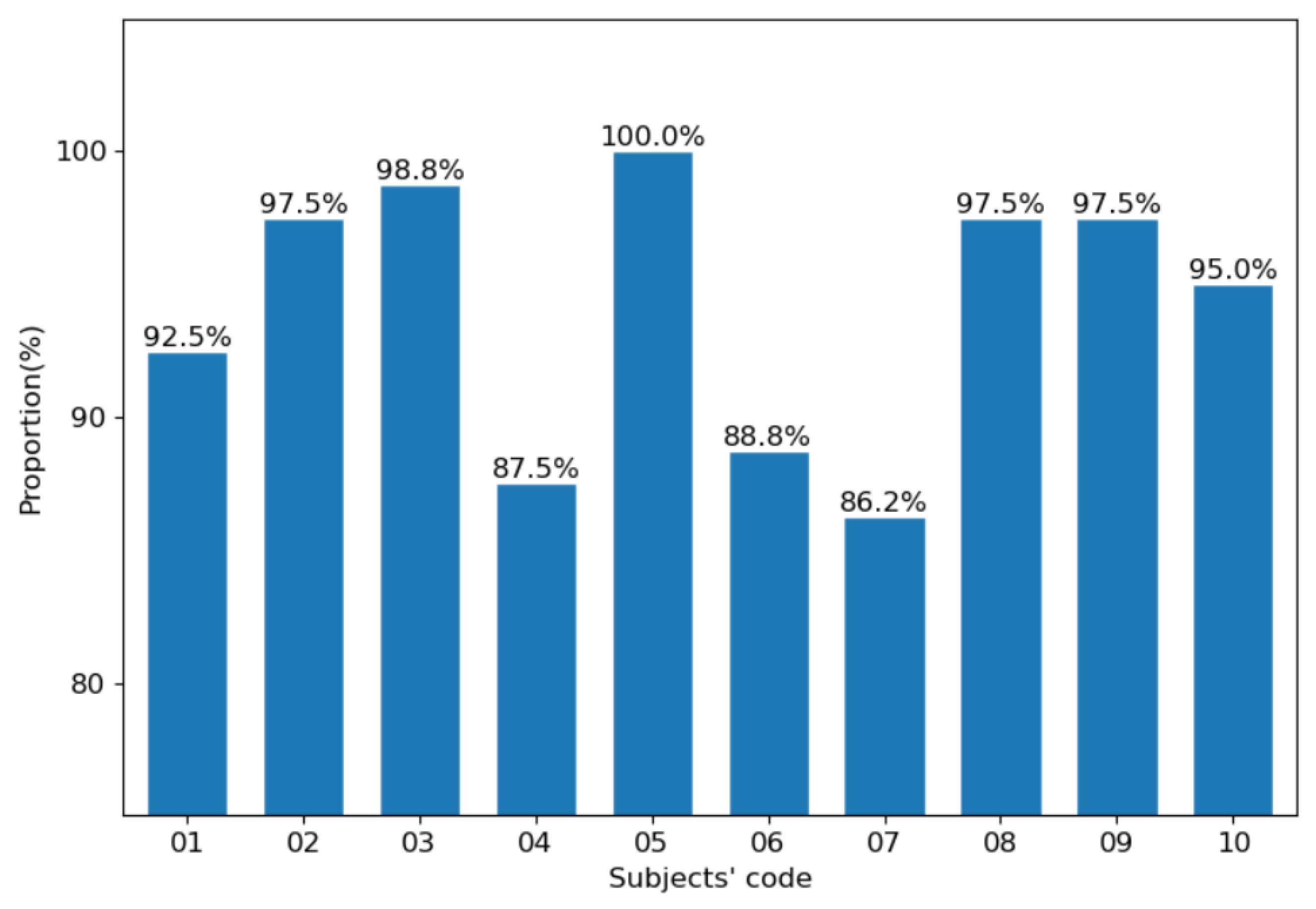
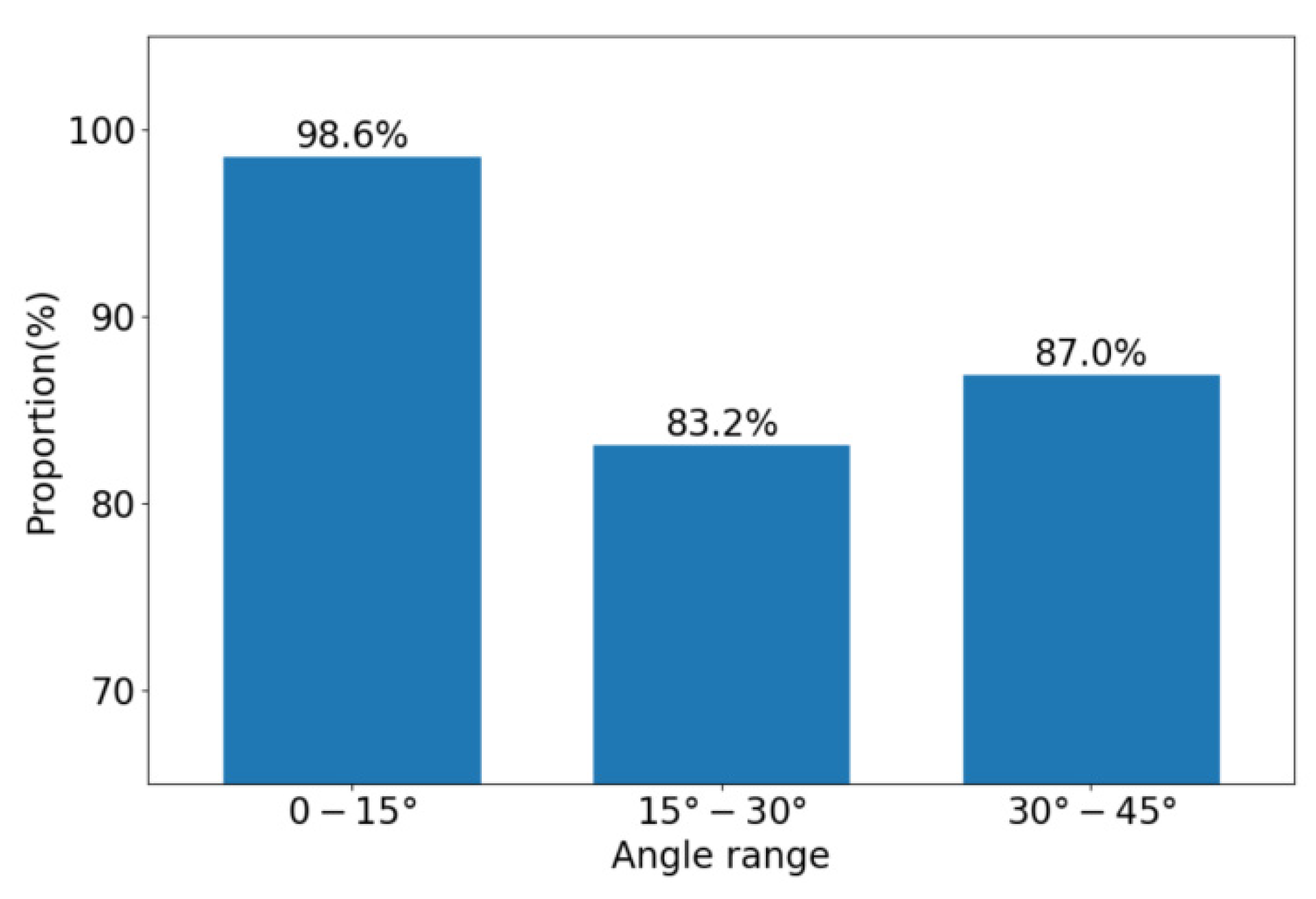
3.2. The Effect of Sitting Posture Recognition
3.3. Comparison and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Biswas, A.; Oh, P.I.; Faulkner, G.E.; Bajaj, R.R.; Silver, M.A.; Mitchell, M.S.; Alter, D.A. Sedentary time and its association with risk for disease incidence, mortality, and hospitalization in adults a systematic review and meta-analysis. Ann. Intern. Med. 2015, 162, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Hassani, A.; Kubicki, A.; Mourey, F.; Yang, F. Advanced 3D movement analysis algorithms for robust functional capacity assessment. Appl. Clin. Inform. 2017, 8, 454–469. [Google Scholar] [CrossRef] [PubMed]
- Anderson, J.L.; Green, A.J.; Yoward, L.S.; Hall, H.K. Validity and reliability of accelerometry in identification of lying, sitting, standing or purposeful activity in adult hospital inpatients recovering from acute or critical illness: A systematic review. Clin. Rehabil. 2018, 32, 233–242. [Google Scholar] [CrossRef] [PubMed]
- Sanchez, M.B.; Loram, I.; Darby, J.; Holmes, P.; Butler, P.B. A video based method to quantify posture of the head and trunk in sitting. Gait Posture 2017, 51, 181–187. [Google Scholar] [CrossRef] [PubMed]
- Devarakota, P.R.; Castillo, F.M.; Ginhoux, R.; Mirbach, B.; Ottersten, B. Occupant classification using range images. IEEE Trans. Veh. Technol. 2007, 56, 1983–1993. [Google Scholar] [CrossRef]
- Edwardson, C.L.; Rowlands, A.V.; Bunnewell, S.; Sanders, J.; Esliger, D.W.; Gorely, T.; Connell, S.; Davies, M.J.; Khunti, K.; Yates, T. Accuracy of posture allocation algorithms for thigh- and waist-worn accelerometers. Med. Sci. Sports Exerc. 2016, 48, 1085–1090. [Google Scholar] [CrossRef]
- Qian, Z.; Bowden, A.E.; Zhang, D.; Wan, J.; Liu, W.; Li, X.; Baradoy, D.; Fullwood, D.T. Inverse piezoresistive nanocomposite sensors for identifying human sitting posture. Sensors 2018, 18, 16. [Google Scholar] [CrossRef]
- Rodriguez, M.D.; Sama, A.; Perez, L.C.; Catala, A.; Cabestany, J.; Rodriguez, M.A. SVM-based posture identification with a single waist-located triaxial accelerometer. Expert Syst. Appl. 2013, 40, 7203–7211. [Google Scholar] [CrossRef]
- Lugade, V.; Fortune, E.; Morrow, M.; Kaufman, K. Validity of using tri-axial accelerometers to measure human movement-Part I: Posture and movement detection. Med. Eng. Phys. 2014, 36, 169–176. [Google Scholar] [CrossRef]
- Ishac, K.; Suzuki, K. LifeChair: A conductive fabric sensor-based smart cushion for actively shaping sitting posture. Sensors 2018, 18, 2261. [Google Scholar] [CrossRef]
- Ma, C.C.; Li, W.F.; Gravina, R.; Fortino, G. Posture detection based on smart cushion for wheelchair users. Sensors 2017, 17, 719. [Google Scholar] [CrossRef] [PubMed]
- Roh, J.; Park, H.J.; Lee, K.J.; Hyeong, J.; Kim, S.; Lee, B. Sitting posture monitoring system based on a low-cost load cell using machine learning. Sensors 2018, 18, 208. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, J.; Andersson, H.; Siden, J. Sitting posture recognition using screen printed large area pressure sensors. In Proceedings of the IEEE Sensor, Glasgow, UK, 29 October–1 November 2017; pp. 232–234. [Google Scholar]
- Ahmad, J.; Andersson, H.; Siden, J. Screen-Printed piezoresistive sensors for monitoring pressure distribution in wheelchair. IEEE Sens. J. 2019, 19, 2055–2063. [Google Scholar] [CrossRef]
- Cheng, J.Y.; Sundholm, M.; Zhou, B.; Hirsch, M.; Lukowicz, P. Smart-surface: Large scale textile pressure sensors arrays for activity recognition. Pervasive Mob. Comput. 2016, 30, 97–112. [Google Scholar] [CrossRef]
- Hu, Q.S.; Tang, X.C.; Tang, W. A smart chair sitting posture recognition system using flex sensors and FPGA implemented artificial neural network. IEEE Sens. J. 2020, 20, 8007–8016. [Google Scholar] [CrossRef]
- Kim, M.; Kim, H.; Park, J.; Jee, K.K.; Lim, J.A.; Park, M.C. Real-time sitting posture correction system based on highly durable and washable electronic textile pressure sensors. Sens. Actuators A Phys. 2018, 269, 394–400. [Google Scholar] [CrossRef]
- Kim, Y.M.; Son, Y.; Kim, W.; Jin, B.; Yun, M.H. Classification of children’s sitting postures using machine learning algorithms. Appl. Sci. 2018, 8, 1280. [Google Scholar] [CrossRef]
- Lee, B.W.; Shin, H. Feasibility study of sitting posture monitoring based on piezoresistive conductive film-based flexible force sensor. IEEE Sens. J. 2016, 16, 15–16. [Google Scholar] [CrossRef]
- Meyer, J.; Arnrich, B.; Schumm, J.; Troster, G. Design and modeling of a textile pressure sensor for sitting posture classification. IEEE Sens. J. 2010, 10, 1391–1398. [Google Scholar] [CrossRef]
- Xu, W.Y.; Huang, M.C.; Amini, N.; He, L.; Sarrafzadeh, M. eCushion: A Textile pressure sensor array design and calibration for sitting posture analysis. IEEE Sens. J. 2013, 13, 3926–3934. [Google Scholar] [CrossRef]
- Shirehjini, A.A.N.; Yassine, A.; Shirmohammadi, S. Design and implementation of a system for body posture recognition. Multimed. Tools Appl. 2014, 70, 1637–1650. [Google Scholar] [CrossRef]
- Zemp, R.; Tanadini, M.; Pluss, S.; Schnuriger, K.; Singh, N.B.; Taylor, W.R.; Lorenzetti, S. Application of machine learning approaches for classifying sitting posture based on force and acceleration sensors. BioMed Res. Int. 2016, 2016. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Jin, B.; Choo, S.; Nam, C.S.; Yun, M.H. Designing of smart chair for monitoring of sitting posture using convolutional neural networks. Data Technol. Appl. 2019, 53, 142–155. [Google Scholar] [CrossRef]
- Liang, G.Q.; Cao, J.N.; Liu, X.F. Smart cushion: A practical system for fine-grained sitting posture recognition. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops, Kona, HI, USA, 13–17 March 2017; pp. 419–424. [Google Scholar]
- Zhang, Z.; Tang, J.; Wu, G. Simple and Lightweight Human Pose Estimation. Available online: https://ui.adsabs.harvard.edu/abs/2019arXiv191110346Z (accessed on 4 December 2020).
- Tekscan Website. Available online: http://www.tekscan.com/ (accessed on 4 December 2020).
- Xiong, J.P.; Cai, L.S.; Wang, F.; He, X.W. SVM-Based spectral analysis for heart rate from multi-channel WPPG sensor signals. Sensors 2017, 17, 506. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.W.; Yu, Q.Z.; He, L.F.; Guo, T.J. The one-against-all partition based binary tree support vector machine algorithms for multi-class classification. Neurocomputing 2013, 113, 1–7. [Google Scholar] [CrossRef]
- Gao, Z.H.; Xiao, Z.H.; Li, H.J. Occupant position recognition with seat surface pressure distributions and support vector machines classifier. Chin. J. Mech. Eng. 2009, 45, 216–220. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Unit Price (USD) | Quantity | Sum (USD) |
|---|---|---|---|
| The pressure sensor array | 123 | 1 | 123 |
| STM32F103C8T6 | 2 | 1 | 2 |
| 74HC595 | 0.3 | 4 | 1.2 |
| 4051 | 0.3 | 4 | 1.2 |
| Bluetooth (HC-05) | 3 | 2 | 6 |
| PCB | 5 | 1 | 5 |
| Others | <10 | ||
| Total | <150 |
| Minimum | Maximum | Average | Standard Deviation | |
|---|---|---|---|---|
| Age (years old) | 21 | 25 | 23.4 | 1.65 |
| Height (cm) | 160 | 181 | 172.6 | 5.97 |
| Weight (kg) | 51 | 84 | 69.0 | 9.17 |
| Normal Sitting | Left Leg Crossed | Right Leg Crossed | |
|---|---|---|---|
| Sitting upright |  |  |  |
| Leaning back |  |  |  |
| Leaning left |  |  |  |
| Leaning right |  |  |  |
| r1 | r2 | d | c | h | l | |
|---|---|---|---|---|---|---|
| Value (pixel) | 7 | 3 | 12 | 4 | 3 | 9 |
| Kernel | Expression | Parameter |
|---|---|---|
| polynomial kernel | ||
| Gaussian kernel | ||
| Sigmoid kernel |
| v1 | v2 | v3 | k | WeakenCoef | |
|---|---|---|---|---|---|
| Value (pixel) | 1 | 2 | 5 | −0.3 | 2.8 |
| Kernel | Optimal Parameters | Best Accuracy |
|---|---|---|
| polynomial kernel | 89.6% | |
| Gaussian kernel | 89.5% | |
| Sigmoid kernel | 87.0% |
| Author | Ask Subjects to Change the Angle and Position of Their Hips | Set Variations for Each Type of Posture | Number of Features | Number of Posture Types | Accuracy |
|---|---|---|---|---|---|
| Ma et al. [11] | No | No | 12 | 5 | 99.47% |
| Roh et al. [12] | No | No | 3 | 6 | 97.2% |
| Kim et al. [18] | No | No | 64 | 5 | 95.3% |
| Zemp et al. [23] | No | No | 17 | 7 | 90.9% |
| Xu et al. [21] | No | No | Unknown | 7 | 85.9% |
| Meyer et al. [20] | No | No | 1046 | 16 | 82% |
| Ahmad et al. [14] | No | No | 19 | 4 | 80% |
| Our study | Yes | Yes | 3 | 4 | 89.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, Q.; Zhao, H.; Li, J.; Xu, P. Hip Positioning and Sitting Posture Recognition Based on Human Sitting Pressure Image. Sensors 2021, 21, 426. https://doi.org/10.3390/s21020426
Wan Q, Zhao H, Li J, Xu P. Hip Positioning and Sitting Posture Recognition Based on Human Sitting Pressure Image. Sensors. 2021; 21(2):426. https://doi.org/10.3390/s21020426
Chicago/Turabian StyleWan, Qilong, Haiming Zhao, Jie Li, and Peng Xu. 2021. "Hip Positioning and Sitting Posture Recognition Based on Human Sitting Pressure Image" Sensors 21, no. 2: 426. https://doi.org/10.3390/s21020426
APA StyleWan, Q., Zhao, H., Li, J., & Xu, P. (2021). Hip Positioning and Sitting Posture Recognition Based on Human Sitting Pressure Image. Sensors, 21(2), 426. https://doi.org/10.3390/s21020426