Mobile LiDAR Scanning System Combined with Canopy Morphology Extracting Methods for Tree Crown Parameters Evaluation in Orchards



Abstract
1. Introduction
2. Materials and Methods
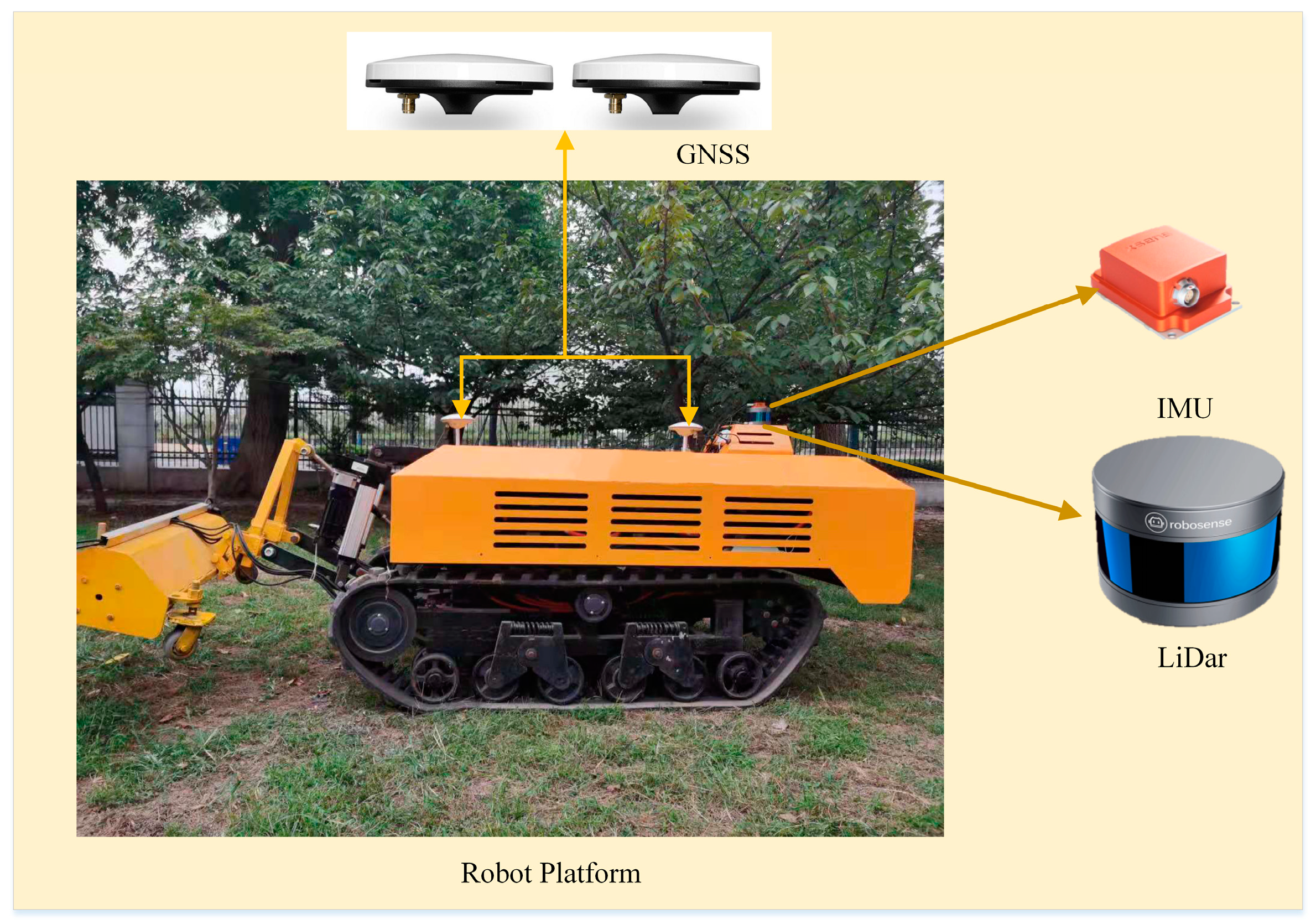
2.1. Experimental Platform
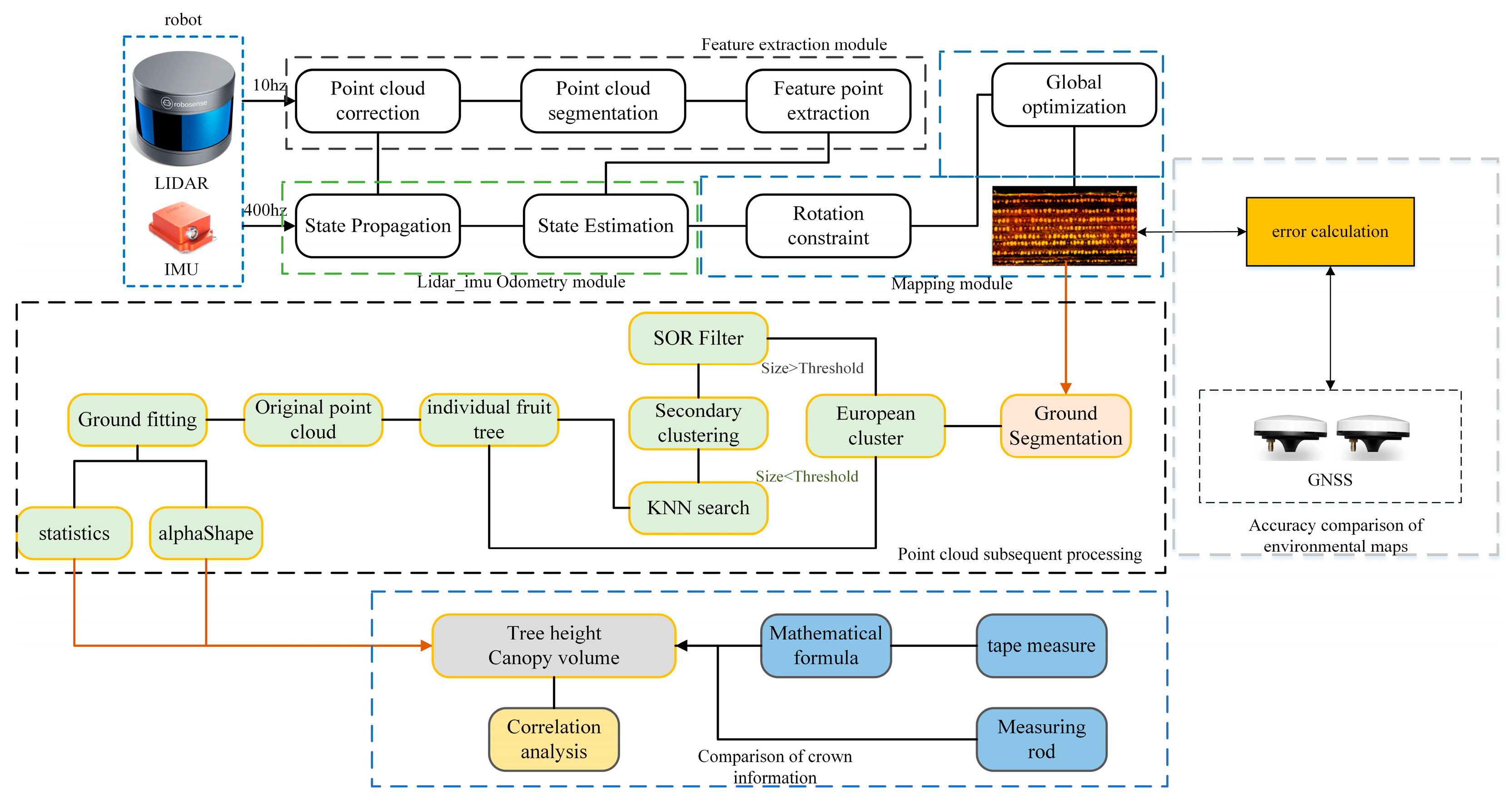
2.2. Software Framework
2.3. Orchard Point Cloud Map Establishments
2.3.1. Feature Point Extraction
2.3.2. LiDAR-IMU Odometry Based on ESKF
- Define the state transition of IMU between time-step k and k + 1 with the error generated during the transition:where is the states of IMU; represent the translation and rotational changes of IMU from time-step k to k + 1; represent the acceleration and gravity bias; and represents the gravity vector.
- The continuous-time linear error model of IMU can be described by Equation (5) [15]:where Ft is the error state transfer matrix, Gt is the noise Jacobi matrix, and w is the Gaussian noise vector; more details can be found in the literature [15].The error propagation model and covariance can be obtained by discretizing Equation (5):where and are the consecutive time-steps of IMU measurements, , and Q expresses the covariance matrix of w.
- Since LiDAR and IMU were calibrated offline [15], the measured value of LiDAR can be used as the observation value of IMU state propagation to update the state.Based on the resolution of [21] and the iterative Kalman filter principle [22], the state correction problem of the error can be converted into an iterative optimization problem:where is the Mahalanobis normal, Jk is the Jacobin of w.r.t. the measurement noise, Mk is the covariance matrix of measurement noise, is a stacked residual vector calculated from point-edge or point-plane pairs [18], denotes the quaternion product, exp denotes the angle vector to quaternion rotation, and is the prior state.
- The iterative matching between adjacent feature points acquired by LiDAR can optimize Equation (8), and the Jacobian ( w.r.t. ), the Kalman gain equation , and the new error state were calculated according to the Kalman filtering (KF) principle.When iterative matching was completed, the final pose could be obtained from , and the covariance matrix PK+1 required for state estimation at moment k + 1 could be obtained by Equation (11):
- Synthesize the state in the global coordinate system [16] and proceed to the next step: optimization iteration after initialization.
2.3.3. Mapping Module
2.3.4. Ground Point Cloud Removal
2.4. Point Cloud Segmentation of Fruit Trees
2.4.1. Point Cloud Clustering of Fruit Trees Based on Distance
2.4.2. Secondary Point Cloud Segmentation Based on Filtering Algorithm
2.5. Extraction of Fruit Tree Canopy Parameters
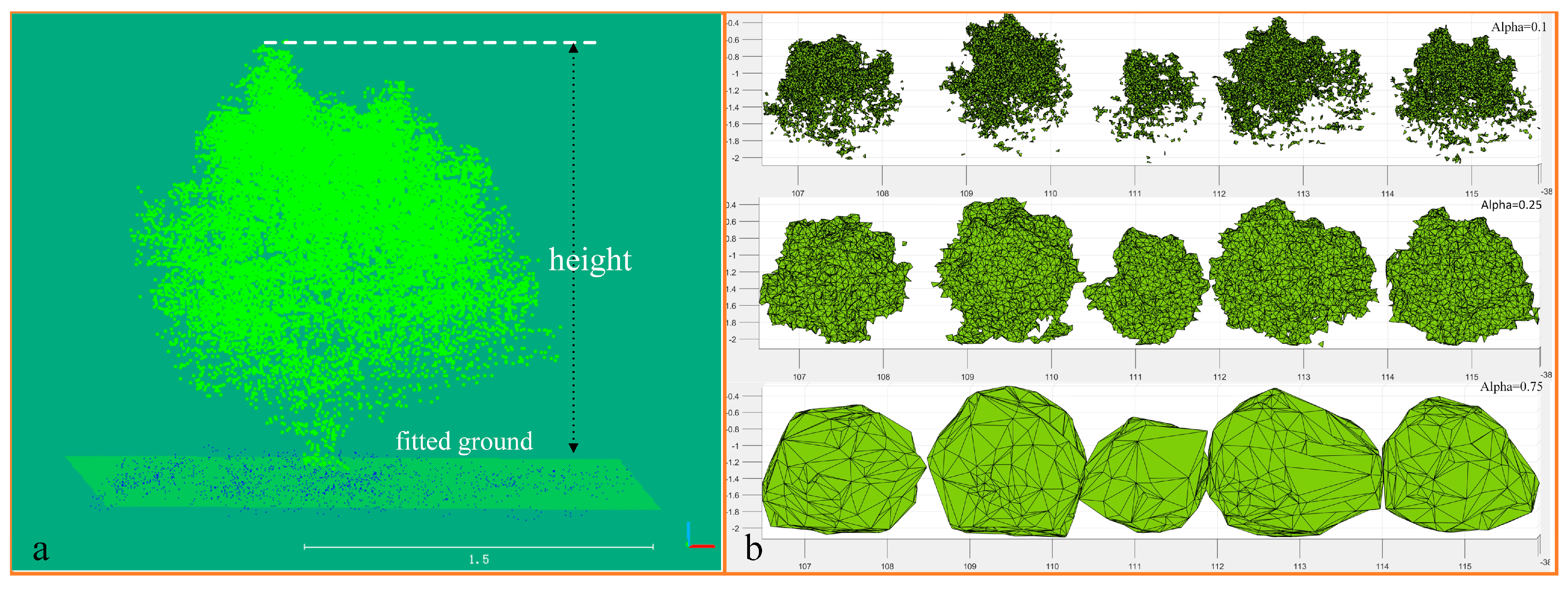
2.5.1. Crown Height Extraction
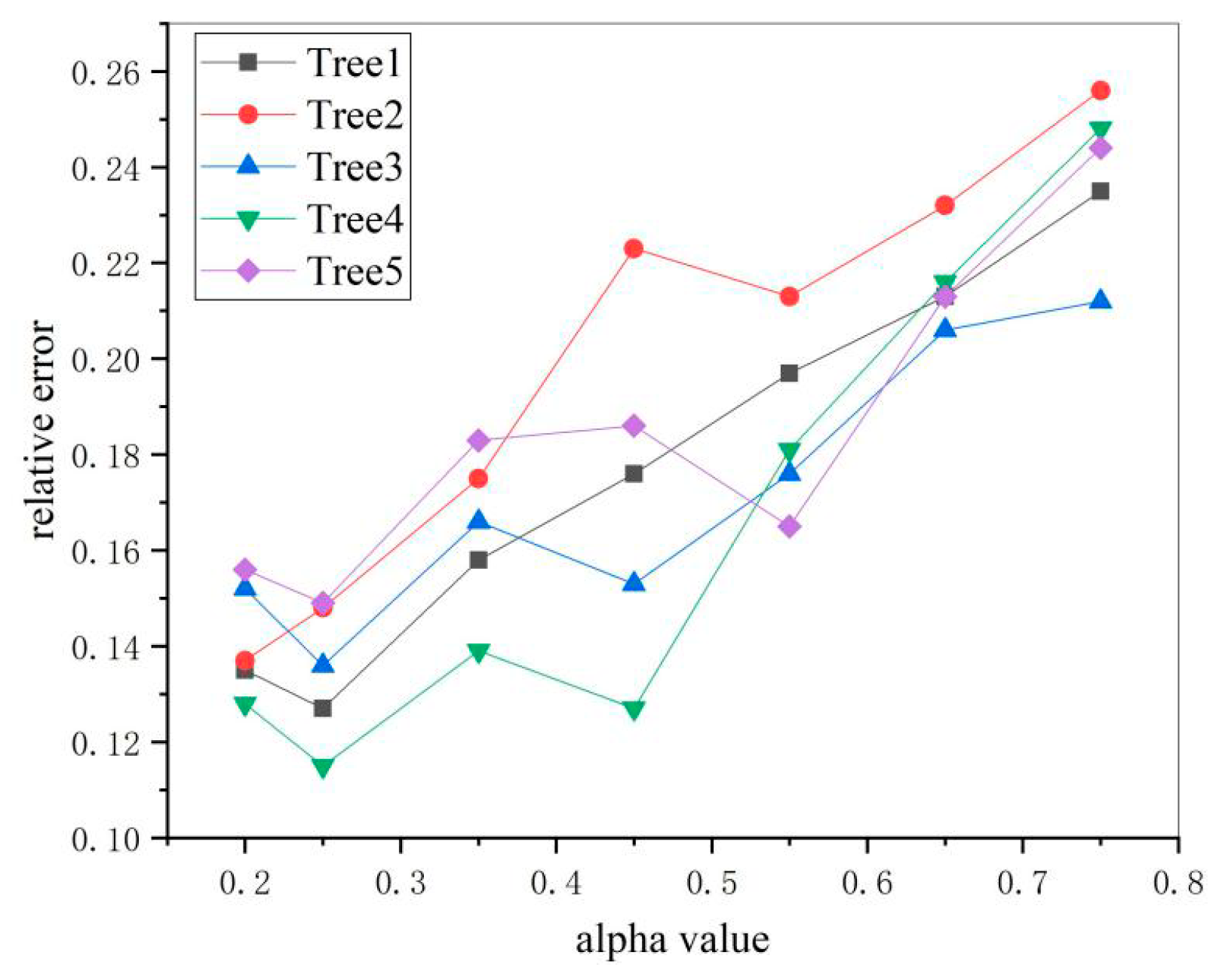
2.5.2. Canopy Volume Calculation
3. System Performance Testing and Analysis
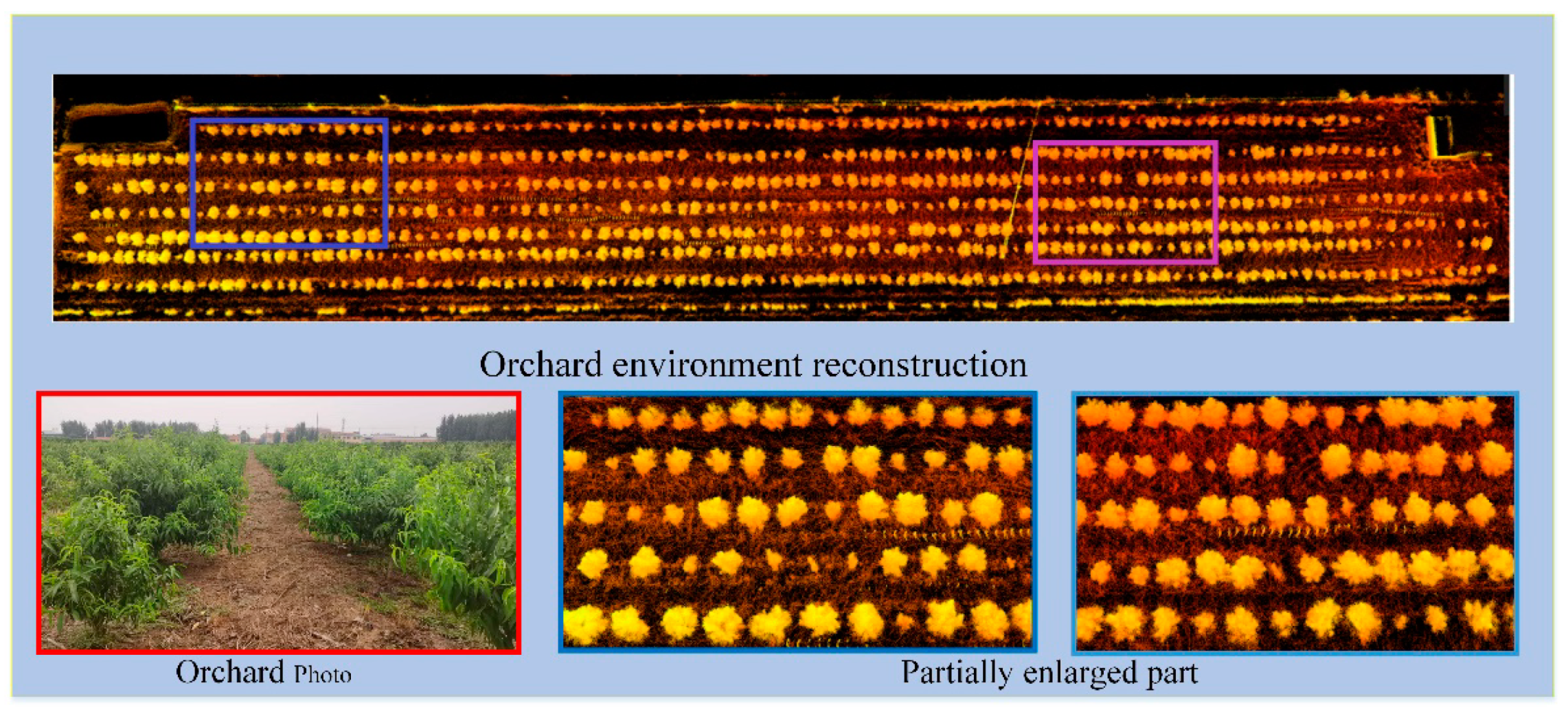
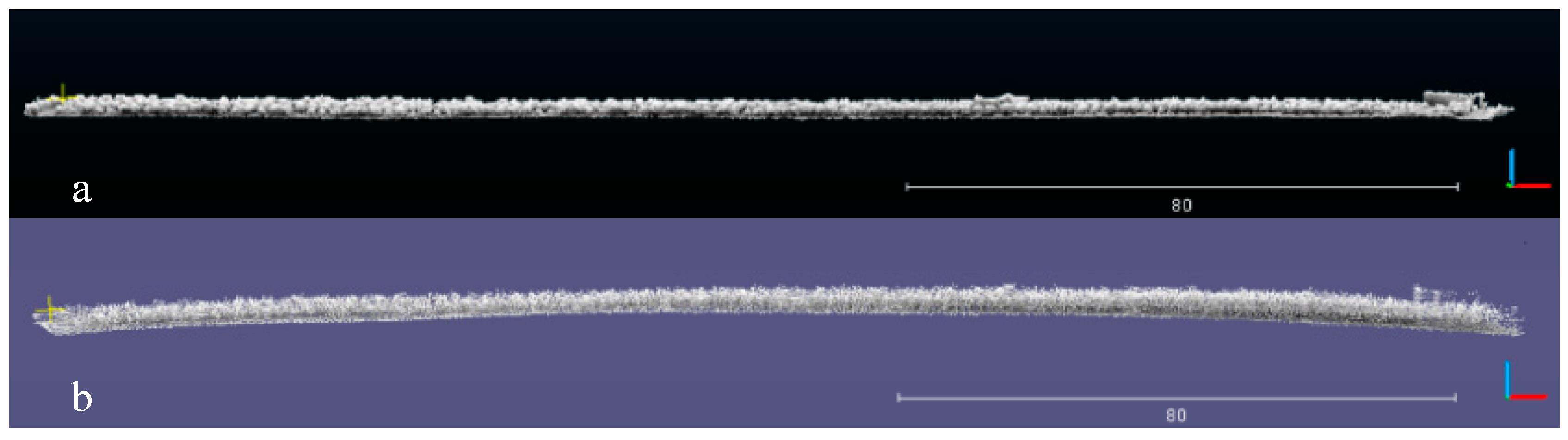
3.1. Comparison of Orchard Environment Reconstruction
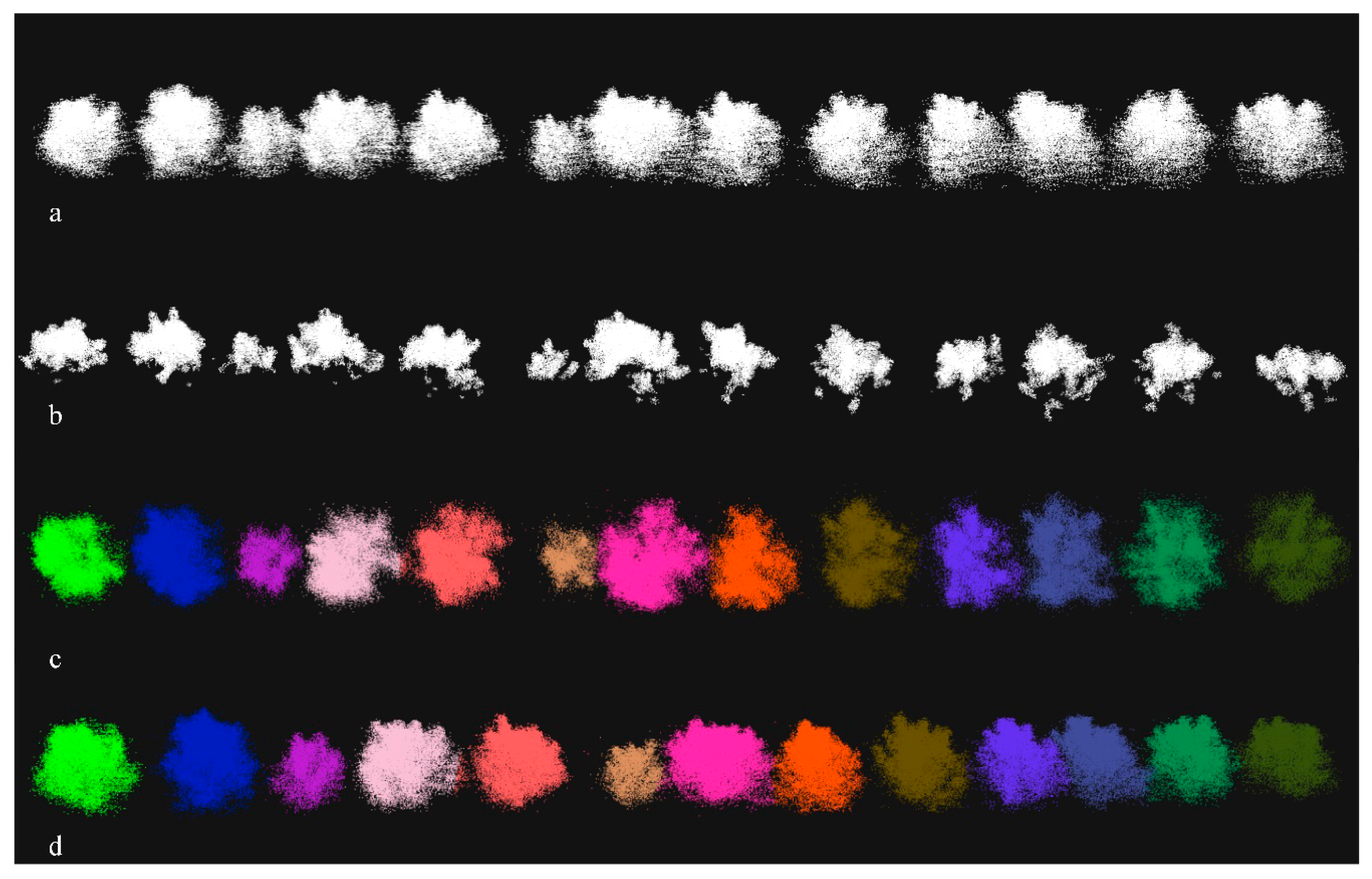
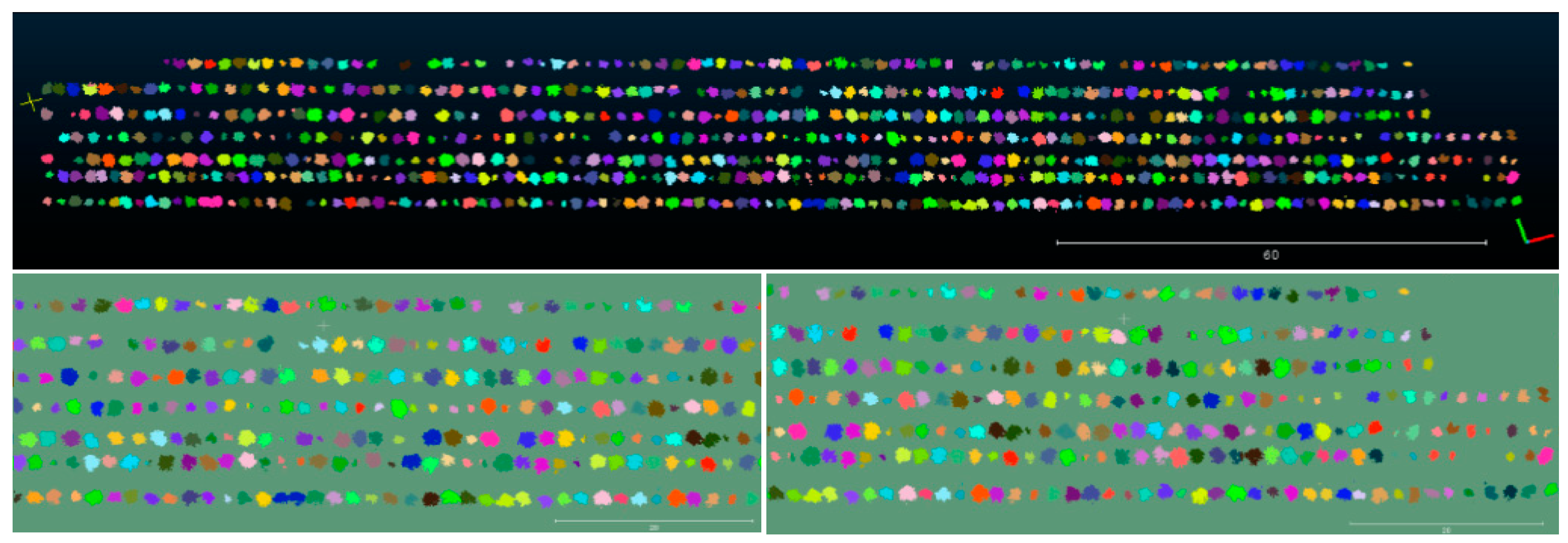
3.2. Orchard Fruit Tree Segmentation Test
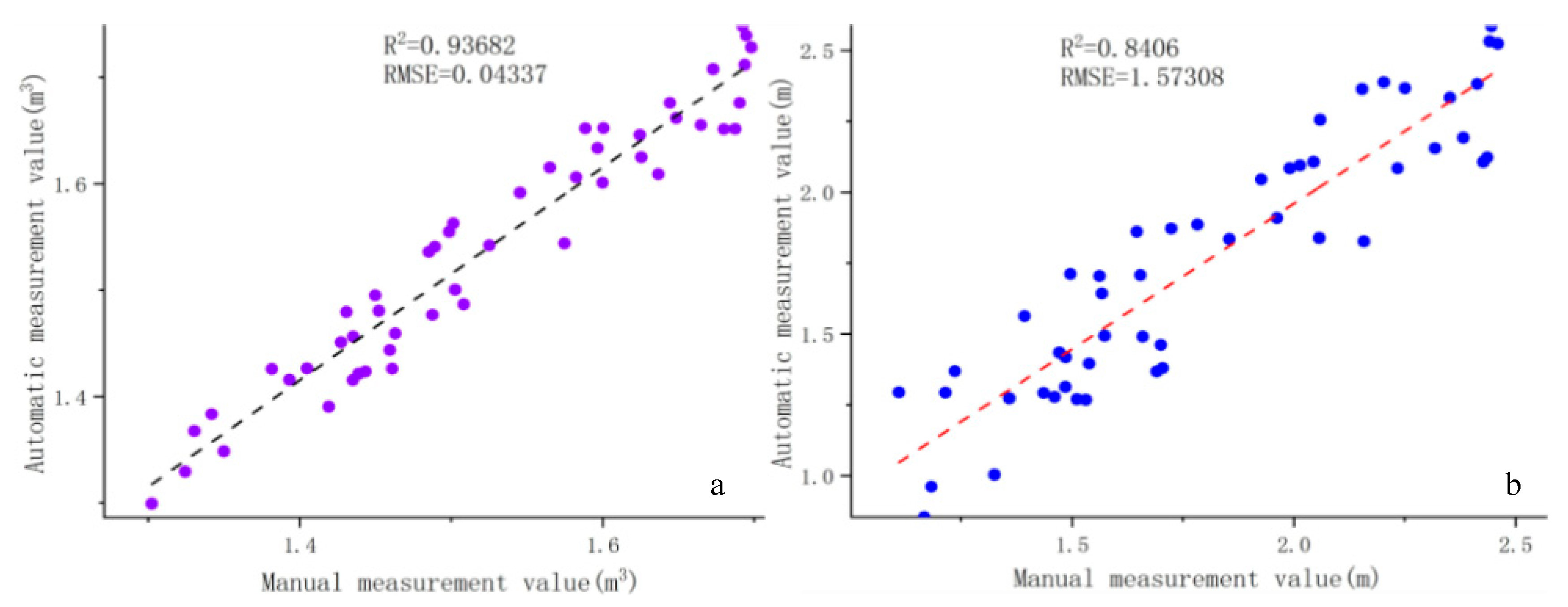
3.3. Tree Height and Crown Volume Measurement Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-Aided Stem Mapping for Forest Inventory with Small-Footprint Mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Abichou, M.; Boudon, F.; Thomas, S.; Zhao, K.; Fournier, C.; Andrieu, B.; Irfan, K.; Hemmerlé, M. Estimating wheat green area index from ground-based LiDAR measurement using a 3D canopy structure model. Agric. For. Meteorol. 2017, 247, 12–20. [Google Scholar] [CrossRef]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Ding, W.; Zhao, S.; Zhao, S.; Gu, J.; Qiu, W.; Guo, B. Measurement Methods of Fruit Tree Canopy Volume Based on Machine Vision. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–10. [Google Scholar]
- Dong, W.; Roy, P.; Isler, V. Semantic mapping for orchard environments by merging two-sides reconstructions of tree rows. J. Field Robot. 2020, 37, 97–121. [Google Scholar] [CrossRef]
- Sun, G.; Wang, X.; Ding, Y.; Lu, W.; Sun, Y. Remote Measurement of Apple Orchard Canopy Information Using Unmanned Aerial Vehicle Photogrammetry. Agronomy 2019, 9, 774. [Google Scholar] [CrossRef]
- Escolà, A.; Martínez-Casasnovas, J.A.; Rufat, J.; Arnó, J.; Arbonés, A.; Sebé, F.; Pascual, M.; Gregorio, E.; Rosell-Polo, J.R. Mobile terrestrial laser scanner applications in precision fruticulture/horticulture and tools to extract information from canopy point clouds. Precis. Agric. 2017, 18, 111–132. [Google Scholar] [CrossRef]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell Polo, J.R. Orange tree canopy volume estimation by manual and LiDAR-based methods. Adv. Anim. Biosci. 2017, 8, 477–480. [Google Scholar] [CrossRef]
- Erfani, S.; Jafari, A.; Hajiahmad, A. Comparison of two data fusion methods for localization of wheeled mobile robot in farm conditions. Artif. Intell. Agric. 2019, 1, 48–55. [Google Scholar] [CrossRef]
- Zhou, S.; Kang, F.; Li, W.; Kan, J.; Zheng, Y.; He, G. Extracting Diameter at Breast Height with a Handheld Mobile LiDAR System in an Outdoor Environment. Sensors 2019, 19, 3212. [Google Scholar] [CrossRef] [PubMed]
- Pierzchała, M.; Giguère, P.; Astrup, R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM. Comput. Electron. Agric. 2018, 145, 217–225. [Google Scholar] [CrossRef]
- Li, H.; Cryer, S.; Raymond, J.; Acharya, L. Interpreting atomization of agricultural spray image patterns using latent Dirichlet allocation techniques. Artif. Intell. Agric. 2020, 4, 253–261. [Google Scholar] [CrossRef]
- Ye, H.; Chen, Y.; Liu, M. Tightly Coupled 3D Lidar Inertial Odometry and Mapping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3144–3150. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. Ieee Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System; ICRA Workshop on Open Source Software: Kobe, Japan, 2009. [Google Scholar]
- Shan, T.; Englot, B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Korf, R.E.; Schultze, P. Large-Scale Parallel Breadth-First Search; AAAI: Pittsburgh, PA, USA, 2005; pp. 1380–1385. [Google Scholar]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Zhao, S.; Fang, Z.; Li, H.; Scherer, S. A Robust Laser-Inertial Odometry and Mapping Method for Large-Scale Highway Environments. IROS 2019, 1285–1292. [Google Scholar] [CrossRef]
- Zheng, F.; Tang, H.; Liu, Y. Odometry-Vision-Based Ground Vehicle Motion Estimation With SE(2)-Constrained SE(3) Poses. Ieee Trans. Cybern. 2018, 49, 2652–2663. [Google Scholar] [CrossRef] [PubMed]
- Agarwal, S.; Mierle, K. Ceres Solver. Available online: http://ceres-solver.org/ (accessed on 24 December 2020).
- Rusu, R.B.; Cousins, S. 3d is here: Point cloud library (pcl). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1–4. [Google Scholar]
- Nguyen, A.; Le, B. 3D point cloud segmentation: A survey. In Proceedings of the 2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Phillippines, 12–15 November 2013; pp. 225–230. [Google Scholar]
- Chum, O.; Matas, J. Optimal Randomized RANSAC. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1472–1482. [Google Scholar] [CrossRef] [PubMed]
- Al-Tamimi, M.S.H.; Sulong, G.; Shuaib, I.L. Alpha shape theory for 3D visualization and volumetric measurement of brain tumor progression using magnetic resonance images. Magn. Reson. Imaging 2015, 33, 787–803. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Max(x) | Max(y) | Max(z) | Mean(x) | Mean(y) | Mean(z) | Time |
|---|---|---|---|---|---|---|---|
| Original Method | 0.201 m | 0.189 m | 1.816 m | 0.095 m | 0.106 m | 1.106 m | 1252.4 s |
| Our Method | 0.198 m | 0.194 m | 0.249 m | 0.098 m | 0.118 m | 0.162 m | 1343.5 s |
| Number | Parameter | Successes | Fail | Success Rate |
|---|---|---|---|---|
| 1 | m = 0.2 | 487 | 118 | 80.4% |
| 2 | m = 0.1 | 487 | 118 | 80.4% |
| 3 | m = 0.08 | 487 | 118 | 80.4% |
| 4 | m = 0.04 | 485 | 120 | 80.1% |
| 5 | m = 0.01 | 572 | 33 | 94.5% |
| 6 | m = 0.008 | 504 | 51 | 83.4% |
| 7 | m = 0.006 | 461 | 144 | 76.1% |
| 8 | m = 0.004 | 368 | 237 | 60.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Zhou, J.; Zhang, W.; Zhang, B. Mobile LiDAR Scanning System Combined with Canopy Morphology Extracting Methods for Tree Crown Parameters Evaluation in Orchards. Sensors 2021, 21, 339. https://doi.org/10.3390/s21020339
Wang K, Zhou J, Zhang W, Zhang B. Mobile LiDAR Scanning System Combined with Canopy Morphology Extracting Methods for Tree Crown Parameters Evaluation in Orchards. Sensors. 2021; 21(2):339. https://doi.org/10.3390/s21020339
Chicago/Turabian StyleWang, Kai, Jun Zhou, Wenhai Zhang, and Baohua Zhang. 2021. "Mobile LiDAR Scanning System Combined with Canopy Morphology Extracting Methods for Tree Crown Parameters Evaluation in Orchards" Sensors 21, no. 2: 339. https://doi.org/10.3390/s21020339
APA StyleWang, K., Zhou, J., Zhang, W., & Zhang, B. (2021). Mobile LiDAR Scanning System Combined with Canopy Morphology Extracting Methods for Tree Crown Parameters Evaluation in Orchards. Sensors, 21(2), 339. https://doi.org/10.3390/s21020339