Design of Deployment Strategies to Monitor the Movement of Animals with Passive Electronic Devices


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Model of Receiver Stations Deployment and Animal Movement
3. Results
3.1. Results of Simulations
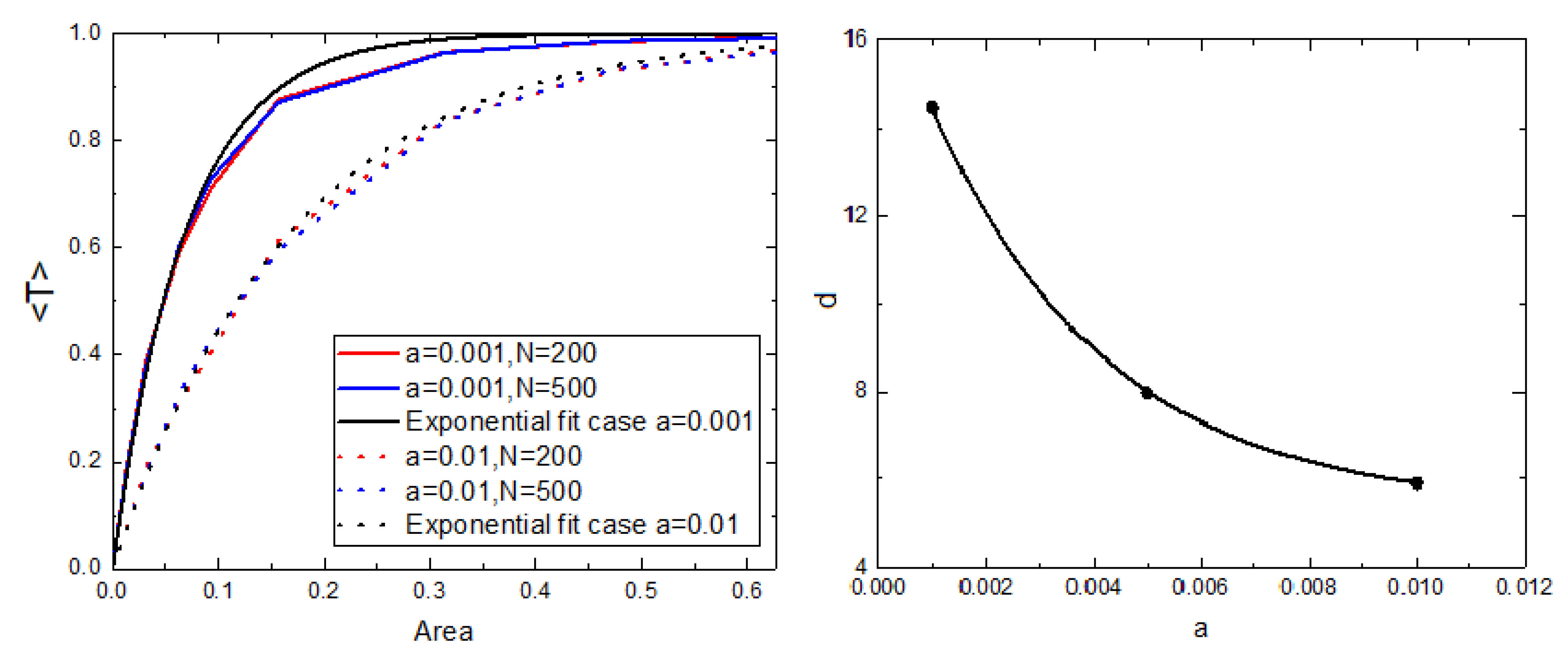
3.1.1. Characterization of the Transfer Function
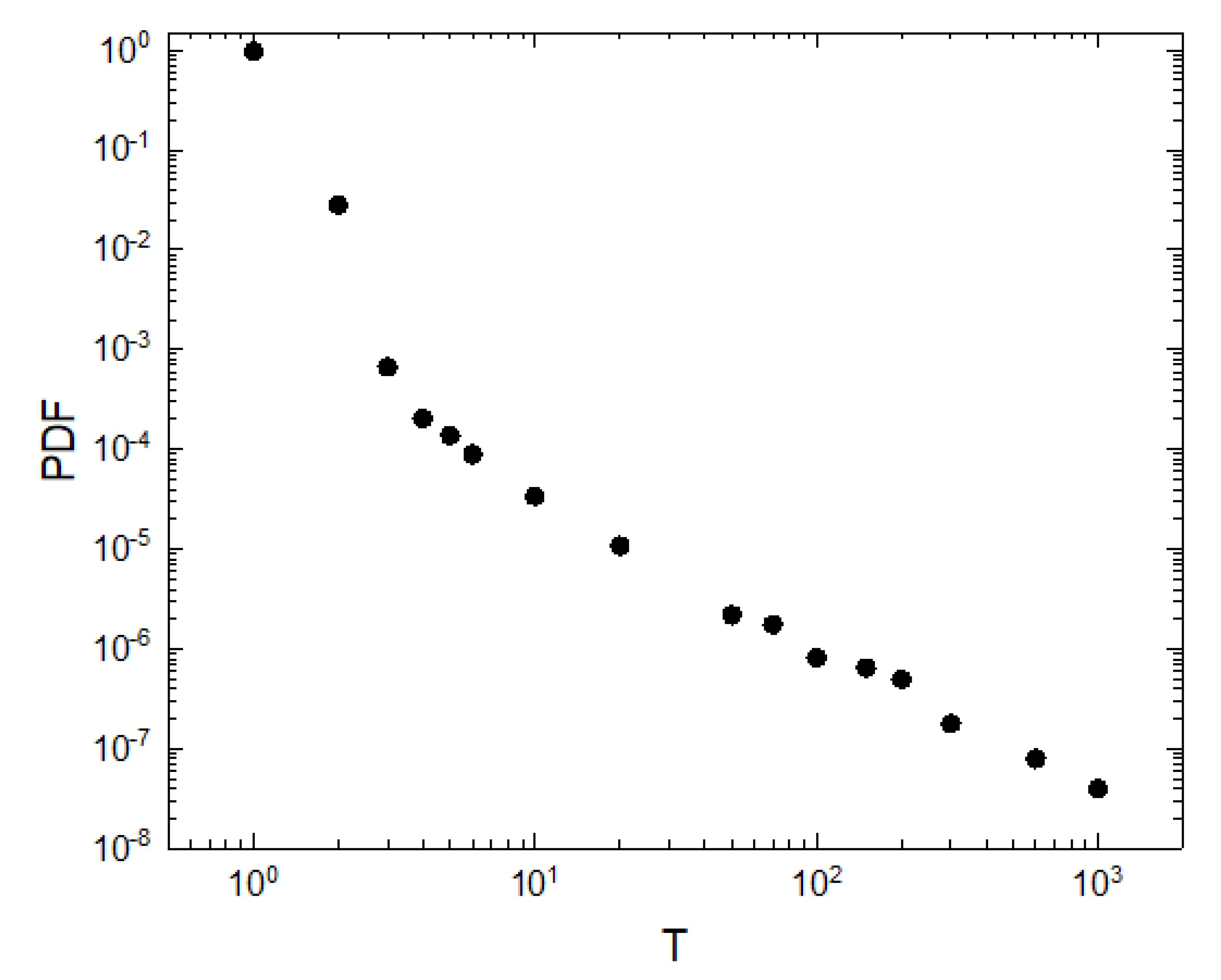
3.1.2. Characterization of the Elapsed Time between Transmission Events
3.1.3. Mobile Receiver Stations
3.2. Model of Sensors in Real Trajectories
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nathan, R. An emerging movement ecology paradigm. Proc. Natl. Acad. Sci. USA 2008, 105, 19050–19051. [Google Scholar] [CrossRef]
- Millspaugh, J.; Marzluff, J. Radio Tracking and Animal Populations; Academic Press: London, UK, 2001. [Google Scholar]
- Costa, D.; Robinson, P.W.; Arnould, J.P.Y.; Harrison, A.L.; Simmons, S.E.; Hassrick, J.L.; Hoskins, A.J.; Kirkman, S.P.; Oosthuizen, H.; Villegas-Amtmann, S.; et al. Accuracy of ARGOS Locations of Pinnipeds at-Sea Estimated Using Fastloc GPS. PLoS ONE 2010, 5, e8677. [Google Scholar] [CrossRef]
- Bekkby, T.; Bjorge, A. Diving behaviour of harbour seal Phoca vitulina pups from nursing to independent feeding. J. Sea Res. 2000, 44, 267–275. [Google Scholar] [CrossRef]
- Bjorge, A.; Bekkby, T.; Bryant, E. Summer home range and habitat selection of harbor seal (Phoca vitulina) pups. Mar. Mammal Sci. 2002, 18, 438–454. [Google Scholar] [CrossRef]
- McConnell, B.; Chambers, C.; Nicholas, K.; Fedak, M. Satellite Tracking of Grey Seals (Halichoerus grypus). J. Zool. 1992, 226, 271–282. [Google Scholar] [CrossRef]
- Teo, S.; Boustany, A.; Blackwell, S.B.; Walli, A.; Weng, K. Validation of geolocation estimates based on light level and sea surface temperature from electronic tags. Mar. Ecol. Prog. Ser. 2004, 283, 81–98. [Google Scholar] [CrossRef]
- Delong, R.; Stewart, B.; Hill, R. Documenting Migrations of Northern Elephant Seals Using Day Length. Mar. Mammal Sci. 1992, 8, 155–159. [Google Scholar] [CrossRef]
- Weimerskirch, H.; Bonadonna, F.; Bailleul, F.; Mabille, G.; Dell’Omo, G.; Lipp, H.-P. GPS tracking of foraging albatrosses. Science 2002, 295, 1259. [Google Scholar] [CrossRef]
- Rutz, C.; Hays, G.C. New frontiers in biologging science. Biol. Lett. 2009, 5, 289–292. [Google Scholar] [CrossRef]
- Hussey, N.E.; Kessel, S.T.; Aarestrup, K.; Cooke, S.J.; Cowley, P.D.; Fisk, A.T.; Harcourt, R.G. Aquatic animal telemetry: A panoramic window into the underwater world. Science 2015, 348, 1255642. [Google Scholar]
- Patterson, T.; Hartmann, K. Designing satellite tagging studies: Estimating and optimizing data recovery. Fish. Oceanogr. 2011, 20, 449–461. [Google Scholar] [CrossRef]
- Standora, E.A.; Nelson, D.R. A telemetric study of the behavior of free-swimming Pacific angel sharks, Squatina californica. South. Calif. Acad. Sci. 1997, 76, 193–201. [Google Scholar]
- Klimley, A.P.; Voegeli, F.; Beavers, S.C.; Boeuf, B.J.L. Automated listening stations for tagged marine fishes. Mar. Technol. Soc. J. 1998, 32, 94–101. [Google Scholar]
- Lagardère, J.; Ducamp, J.; Favre, L.; Dupin, J.M.; Spérandio, M. A method for the quantitative evaluation of fish movements in salt ponds by acoustic telemetry. J. Exp. Mar. Biol. Ecol. 1990, 141, 221–236. [Google Scholar] [CrossRef]
- Nelson, D.R. Telemetry studies of sharks: A review, with applications in resource management. NOAA Tech. Rep. NMFS 1990, 90, 239–256. [Google Scholar]
- Tulevech, S.M.; Recksiek, C. Acoustic tracking of adult white grunt, Haemulon plumieri, in Puerto Rico and Florida. Fish. Res. 1994, 19, 301–319. [Google Scholar] [CrossRef]
- Bégout, M.L.; Lagardère, J. An acoustic telemetry study of seabream (Sparus aurata L.): First results on activity rhythm, effects of environmental variables and space utilization. Hydrobiologica 1995, 300/301, 417–423. [Google Scholar] [CrossRef]
- Lacroix, G.L.; McCurdy, P. Migratory behaviour of post-smolt Atlantic salmon during initial stages of seaward migration. J. Fish Biol. 1996, 49, 1086–1101. [Google Scholar] [CrossRef]
- O’Dor, R.K.; Andrade, Y.; Webber, D.; Sauer, W.; Roberts, M.; Smale, M.; Voegeli, F.M. Applications and performance of radio-acoustic positioning and telemetry (RAPT) systems. Hydrobiologia 1998, 371/372, 1–8. [Google Scholar] [CrossRef]
- Voegeli, F.A.; Lacroix, G.L.; Anderson, J.M. Development of miniature pingers for tracking Atlantic salmon smolts at sea. Hydrobiologia 1998, 371–372, 35–46. [Google Scholar] [CrossRef]
- Voegeli, F.A.; Smale, M.; Webber, D.; Andrade, Y.; O’Dor, R. Ultrasonic telemetry, tracking and automated monitoring technology for sharks. Environ. Biol. Fishes 2001, 60, 267–281. [Google Scholar] [CrossRef]
- Heupel, M.; Hueter, R. Use of a Remote Acoustic Telemetry System to Monitor Shark Movements in a Coastal Nursery Area; Kluwer Academic Publishers: Amsterdam, The Netherlands, 2001; pp. 217–236. [Google Scholar]
- Starr, R.M.; Heine, J.; Felton, J.; Cailliet, G.M. Movements of bocaccio (Sebastes paucispinis) and greenspotted (S. chlorostictus) rockfishes in a Monterey submarine canyon: Implications for the design of marine reserves. Fish. Bull. 2002, 100, 324–337. [Google Scholar]
- Cote, D.; Ollerhead, L.; Scruton, D.; McKinley, R.S. Microhabitat use of juvenile Atlantic cod in a coastal area of Newfoundland determined by 2D telemetry. Mar. Ecol. Prog. Ser. 2003, 265, 227–234. [Google Scholar] [CrossRef][Green Version]
- Welch, D.; Boehlert, G.; Ward, B. POST—The Pacific Ocean salmon tracking project. Oceanol. Acta 2002, 25, 243–253. [Google Scholar] [CrossRef]
- Heupel, M.R.; Semmens, J.; Hobday, A. Automated acoustic tracking of aquatic animals: Scales, design and deployment of listening stations arrays. Mar. Freshw. Res. 2006, 57, 1–13. [Google Scholar] [CrossRef]
- Alós, J.; Palmer, M.; Rosselló, R.; Arlinghaus, R. Fast and behavior-selective exploitation of a marine fish targeted by anglers. Sci. Rep. 2016, 6, 38093. [Google Scholar]
- Ellis, R.D.; Flaherty-Walia, K.E.; Collins, A.B.; Bickford, J.W.; Boucek, R.; Walters Burnsed, S.L.; Lowerre-Barbieri, S.K. Acoustic telemetry array evolution: From species- and project-specific designs to large-scale, multispecies, cooperative networks. Fish. Res. 2019, 209, 186–195. [Google Scholar] [CrossRef]
- Brownscombe, J.; Lédée, E.; Raby, G.D.; Struthers, D.P.; Gutowsky, L.F.; Nguyen, V.M.; Young, N.; Stokesbury, M.J.W.; Holbrook, C.M.; Brenden, T.O.; et al. Conducting and interpreting fish telemetry studies: Considerations for researchers and resource managers. Rev. Fish Biol. Fish. 2019, 29, 369–400. [Google Scholar] [CrossRef]
- De Melo, L.F.B.; Sábato, M.A.L.; Magni, E.M.V.; Young, R.J.; Coelho, C.M. Secret lives of maned wolves (Chrysocyon brachyurus Illiger 1815): As revealed by GPS tracking collars. J. Zool. 2007, 271, 27–36. [Google Scholar] [CrossRef]
- Rebai, M.; Le Berre, M.; Snoussi, H.; Hnaien, F.; Khoukhi, L. Sensor deployment optimization methods to achieve both coverage and connectivity in wireless sensor networks. Comput. Oper. Res. 2015, 59, 11–21. [Google Scholar] [CrossRef]
- Kraus, R.T.; Holbrook, C.M.; Vandergoot, C.S.; Stewart, T.R.; Faust, M.D.; Watkinson, D.A.; Charles, C.; Pegg, M.; Enders, E.C.; Krueger, C.C. Evaluation of acoustic telemetry grids for determining aquatic animal movement and survival. Methods Ecol. Evol. 2018, 9, 1489–1502. [Google Scholar] [CrossRef]
- Steckenreuter, A.; Hoenner, X.; Huveneers, C.; Simpfendorfer, C.; Buscot, M.; Tattersall, K.; McDowall, P. Optimising the design of large-scale acoustic telemetry curtains. Mar. Freshw. Res. 2017, 68, 1403–1413. [Google Scholar] [CrossRef]
- Heupel, M.; Simpfendorfer, C. Estimation of mortality of juvenile blacktip sharks, Carcharhinus limbatus, within a nursery area using telemetry data. Can. J. Fish. Aquat. Sci. 2002, 59, 624–632. [Google Scholar] [CrossRef]
- Ke, W.; Liu, B.; Tsai, M. Constructing a wireless sensor network to fully cover critical grids by deploying minimum sensors on grid points is np-complete. IEEE Trans. Comput. 2007, 56, 710–715. [Google Scholar] [CrossRef]
- Ke, W.; Liu, B.; Tsai, M. The critical-square-grid coverage problem in wireless sensor networks is NP-complete. Comput. Netw. 2011, 55, 2209–2220. [Google Scholar] [CrossRef]
- Sequeira, A.M.M.; Heupel, M.R.; Lea, M.-A.; Eguíluz, V.M.; Duarte, C.M.; Meekan, M.G.; Thums, M.; Calich, H.J.; Carmichael, R.H.; Costa, D.P.; et al. The importance of sample size in marine megafauna tagging studies. Ecol. Appl. 2019, 29, e01947. [Google Scholar] [CrossRef]
- Bovet, P.; Benhamou, S. Optimal sinuosity in central place foraging movements. Anim. Behav. 1991, 42, 57–62. [Google Scholar] [CrossRef]
- Bovet, P. Optimal randomness in foraging movement: A central place model. In Rhythms in Biology and Other Fields of Application; Springer: Berlin/Heidelberg, Germany, 1983; pp. 295–302. [Google Scholar]
- Wakefield, E.D.; Phillips, R.A.; Matthiopoulos, J. Quantifying habitat use and preferences of pelagic seabirds using individual movement data: A review. Mar. Ecol. Prog. Ser. 2009, 391, 165–182. [Google Scholar] [CrossRef]
- Comeau, L.; Campana, S.; Castonguay, M. Automated monitoring of a large-scale cod (Gadus morhua) migration in the open sea. Can. J. Fish. Aquat. Sci. 2002, 59, 1845–1850. [Google Scholar] [CrossRef]
- Lacroix, G.; Knox, D.; Stokesbury, M. Survival and behaviour of post-smolt Atlantic salmon in coastal habitat with extreme tides. J. Fish Biol. 2005, 66, 485–498. [Google Scholar] [CrossRef]
- Stark, K.E.; Jackson, G.D.; Lyle, J. Tracking arrow squid movements with an automated acoustic telemetry system. Mar. Ecol. Prog. Ser. 2005, 299, 167–177. [Google Scholar] [CrossRef]
- Cowley, P.; Bennett, R.; Childs, A.R.; Murray, T. Reflection on the first five years of South Africa’s Acoustic Tracking Array Platform (ATAP): Status, challenges and opportunities. Afr. J. Mar. Sci. 2017, 39, 363–372. [Google Scholar] [CrossRef]
- Burton, C.; Neilson, E.; Moreira, D.; Ladle, A.; Steenweg, R.; Fisher, J.T.; Bayne, E.; Boutin, S. Wildlife camera trapping: A review and recommendations for linking surveys to ecological processes. J. Appl. Ecol. 2015, 52, 675–685. [Google Scholar] [CrossRef]
- Steenweg, R.; Hebblewhite, M.; Kays, R.; Ahumada, J.; Fisher, J.; Burton, C.; Townsend, S.E.; Carbone, C.; Rowcliffe, J.M.; Whittington, J.; et al. Scaling-up camera traps: Monitoring the planet’s biodiversity with networks of remote sensors. Front. Ecol. Environ. 2017, 15, 26–34. [Google Scholar] [CrossRef]
- Campos-Candela, A.; Palmer, M.; Balle, S.; Alós, J. A camera-based method for estimating absolute density in animals displaying home range behaviour. J. Anim. Ecol. 2017, 87, 825–837. [Google Scholar] [CrossRef]
- Kessel, S.T.; Cooke, S.; Heupel, M.R.; Hussey, N.E.; Simpfendorfer, C.A.; Vagle, S.; Fisk, A.T. A review of detection range testing in aquatic passive acoustic telemetry studies. Rev. Fish Biol. Fish. 2014, 24, 199–218. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kazimierski, L.D.; Rodríguez, J.P.; Eguíluz, V.M. Design of Deployment Strategies to Monitor the Movement of Animals with Passive Electronic Devices. Sensors 2021, 21, 326. https://doi.org/10.3390/s21020326
Kazimierski LD, Rodríguez JP, Eguíluz VM. Design of Deployment Strategies to Monitor the Movement of Animals with Passive Electronic Devices. Sensors. 2021; 21(2):326. https://doi.org/10.3390/s21020326
Chicago/Turabian StyleKazimierski, Laila D., Jorge P. Rodríguez, and Víctor M. Eguíluz. 2021. "Design of Deployment Strategies to Monitor the Movement of Animals with Passive Electronic Devices" Sensors 21, no. 2: 326. https://doi.org/10.3390/s21020326
APA StyleKazimierski, L. D., Rodríguez, J. P., & Eguíluz, V. M. (2021). Design of Deployment Strategies to Monitor the Movement of Animals with Passive Electronic Devices. Sensors, 21(2), 326. https://doi.org/10.3390/s21020326