
Uncertainty-Aware Knowledge Distillation for Collision Identification of Collaborative Robots


Abstract
:1. Introduction
2. Related Work
2.1. Deep Learning Methods for Collision Identification of Collaborative Robots
2.2. Knowledge Distillation
2.3. Uncertainty Estimation
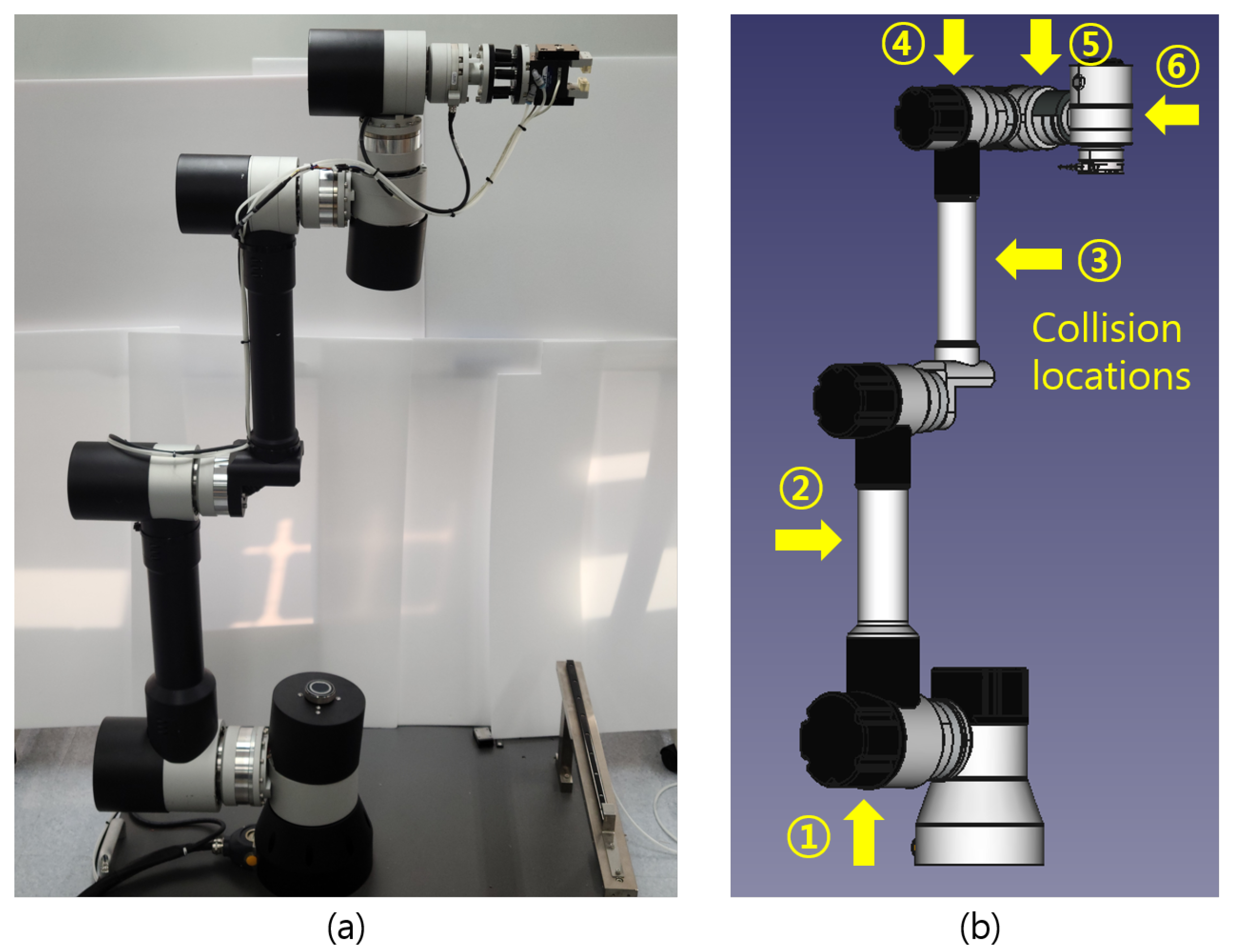
3. Collision Modeling and Data Collection
3.1. Mathematical Modelling of Collisions
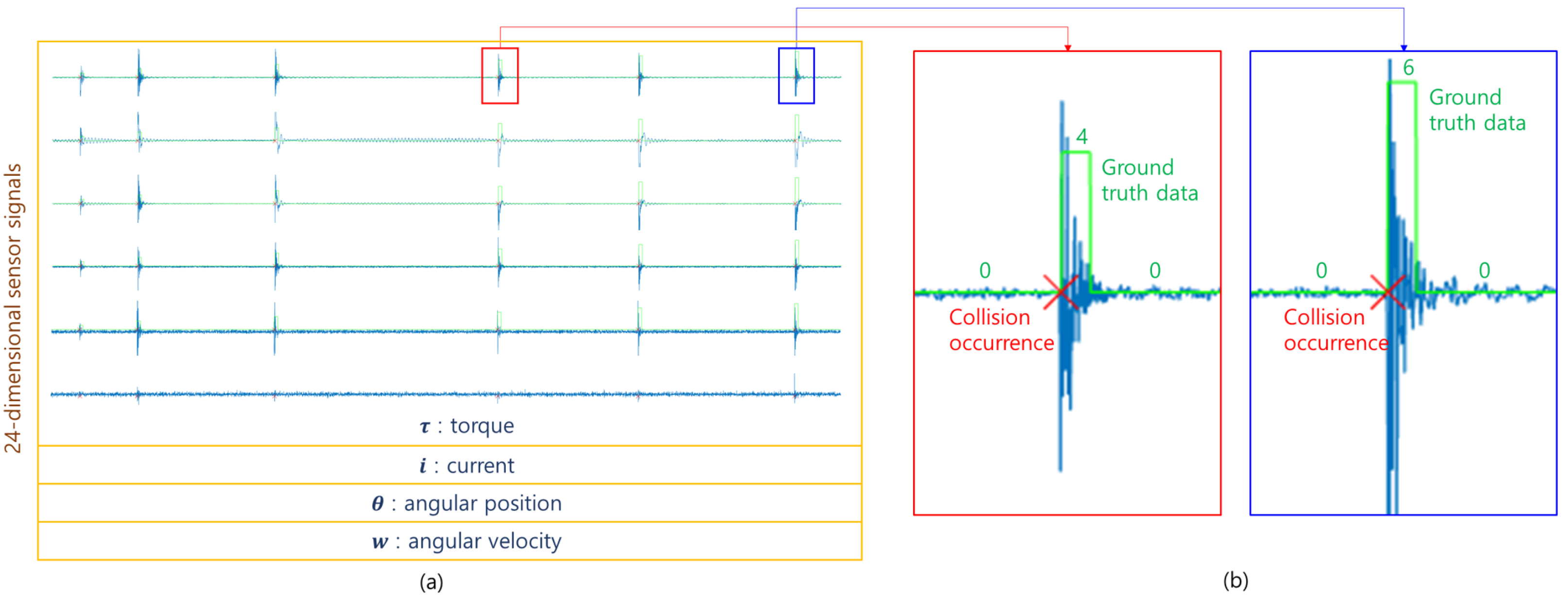
3.2. Data Collection and Labeling
4. Proposed Method
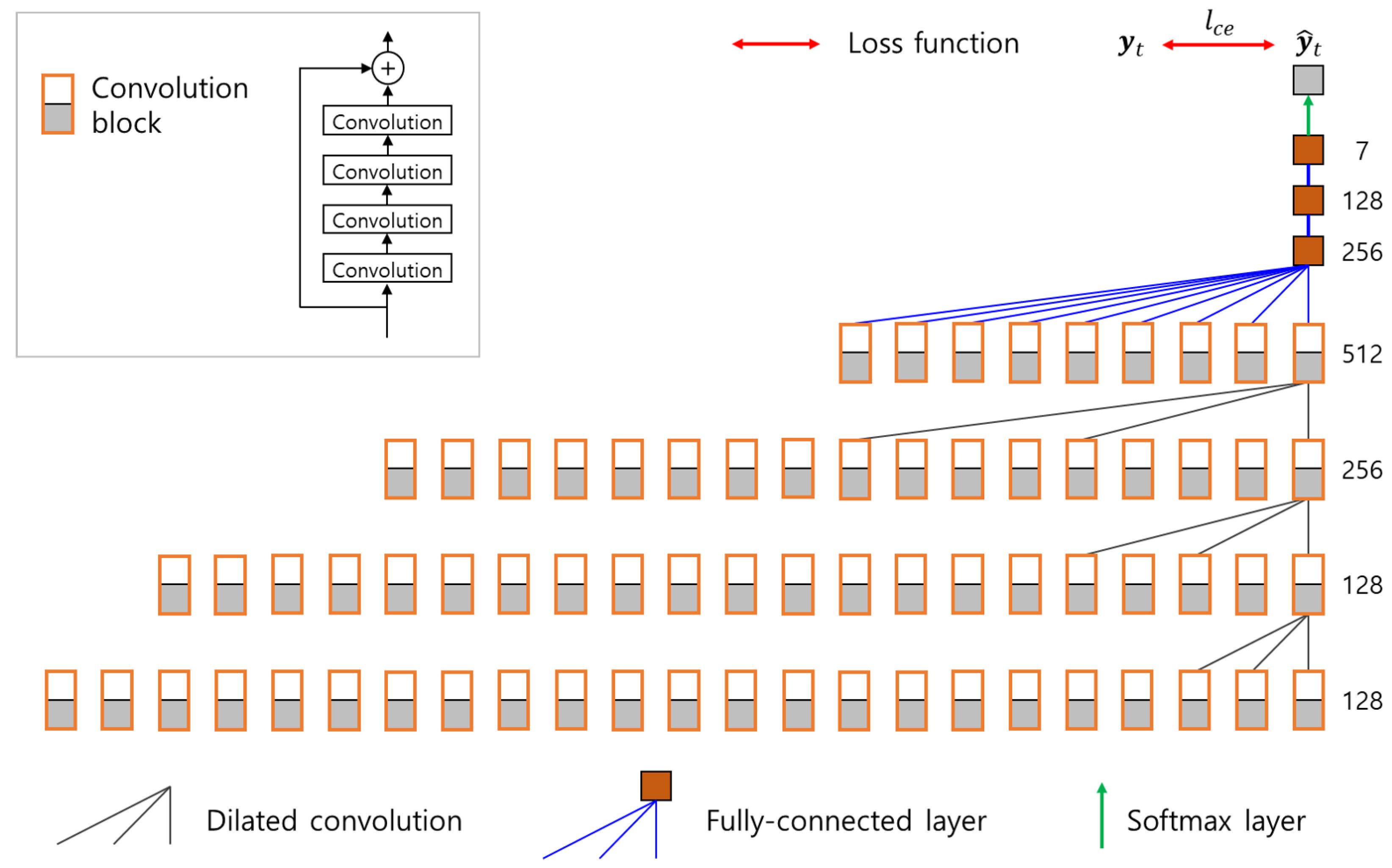
4.1. Network Architectures
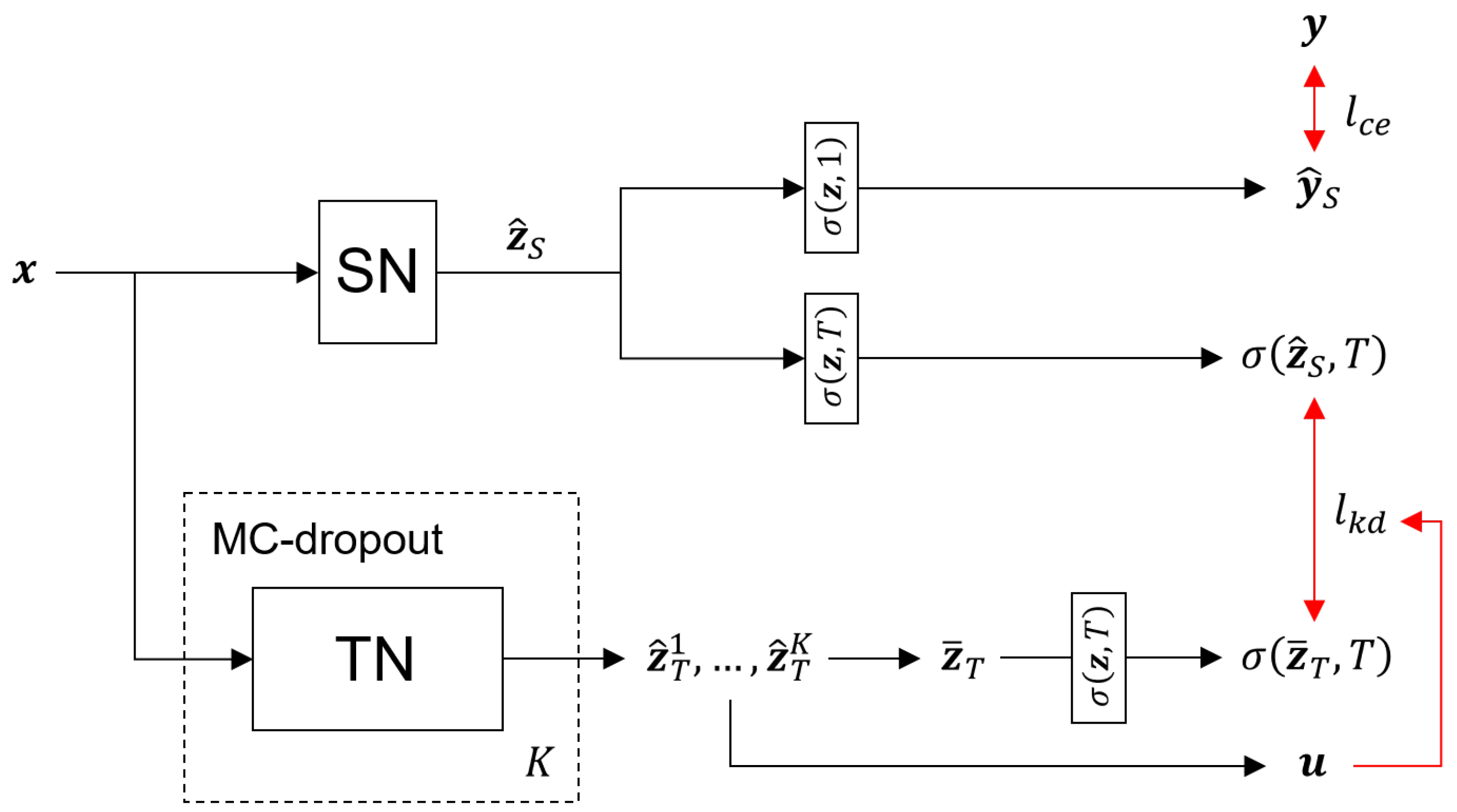
4.2. Uncertainty-Aware Knowledge Distillation
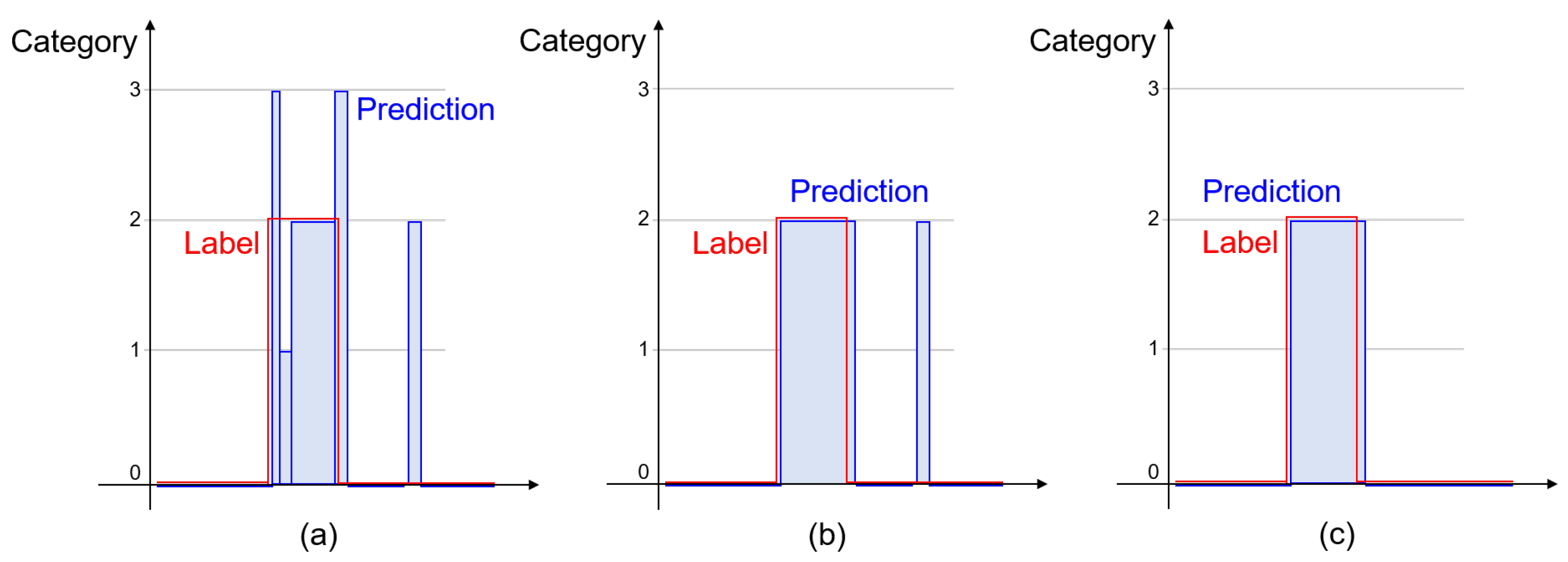
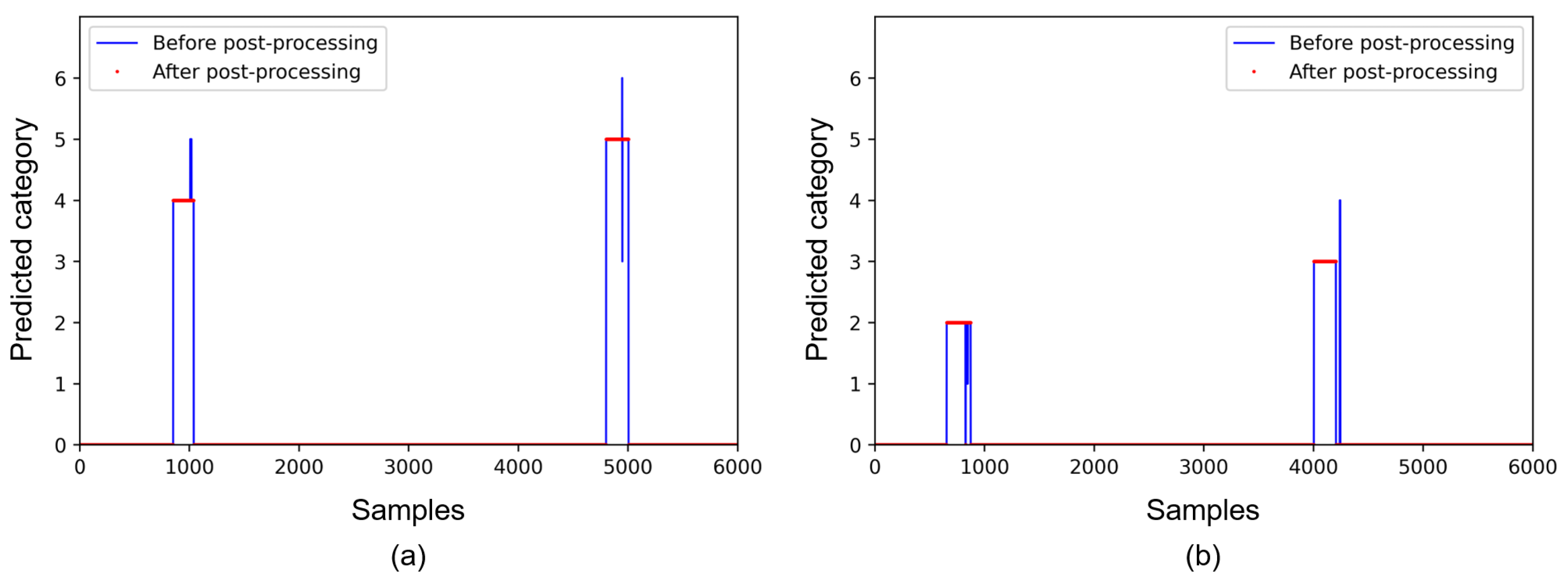
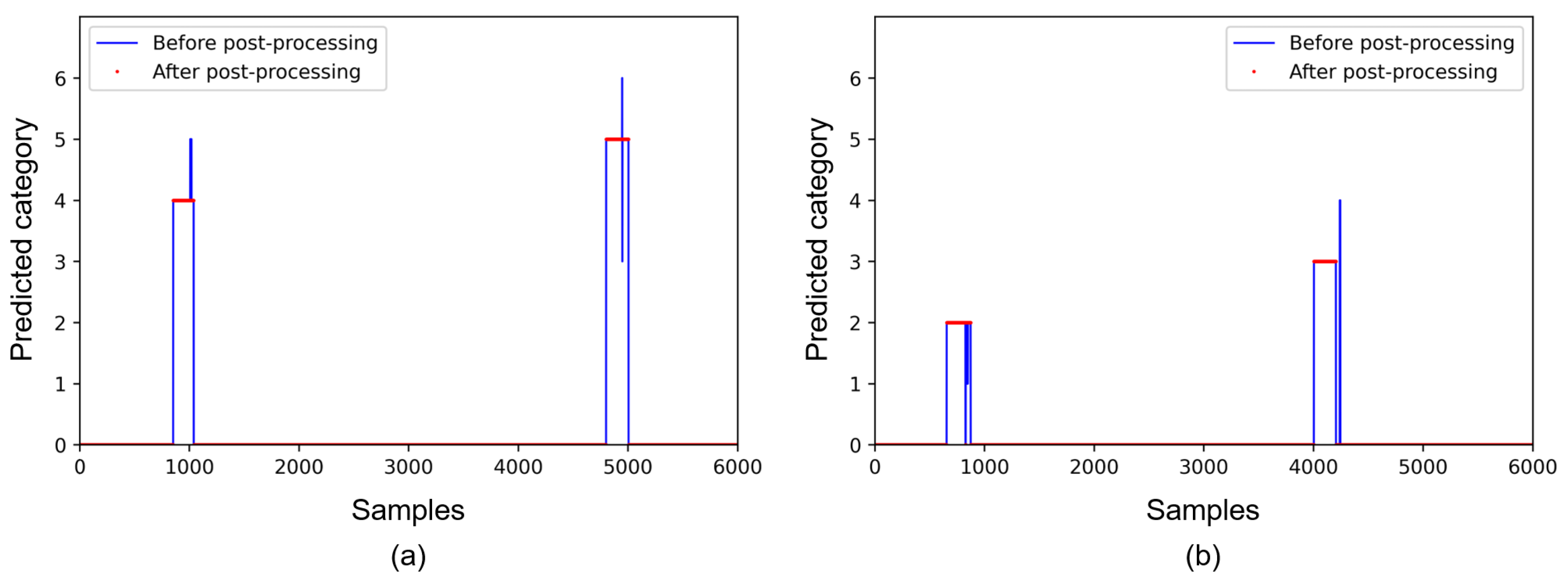
4.3. Post-Processing
5. Experiments
5.1. Experimental Environment and Evaluation Measures
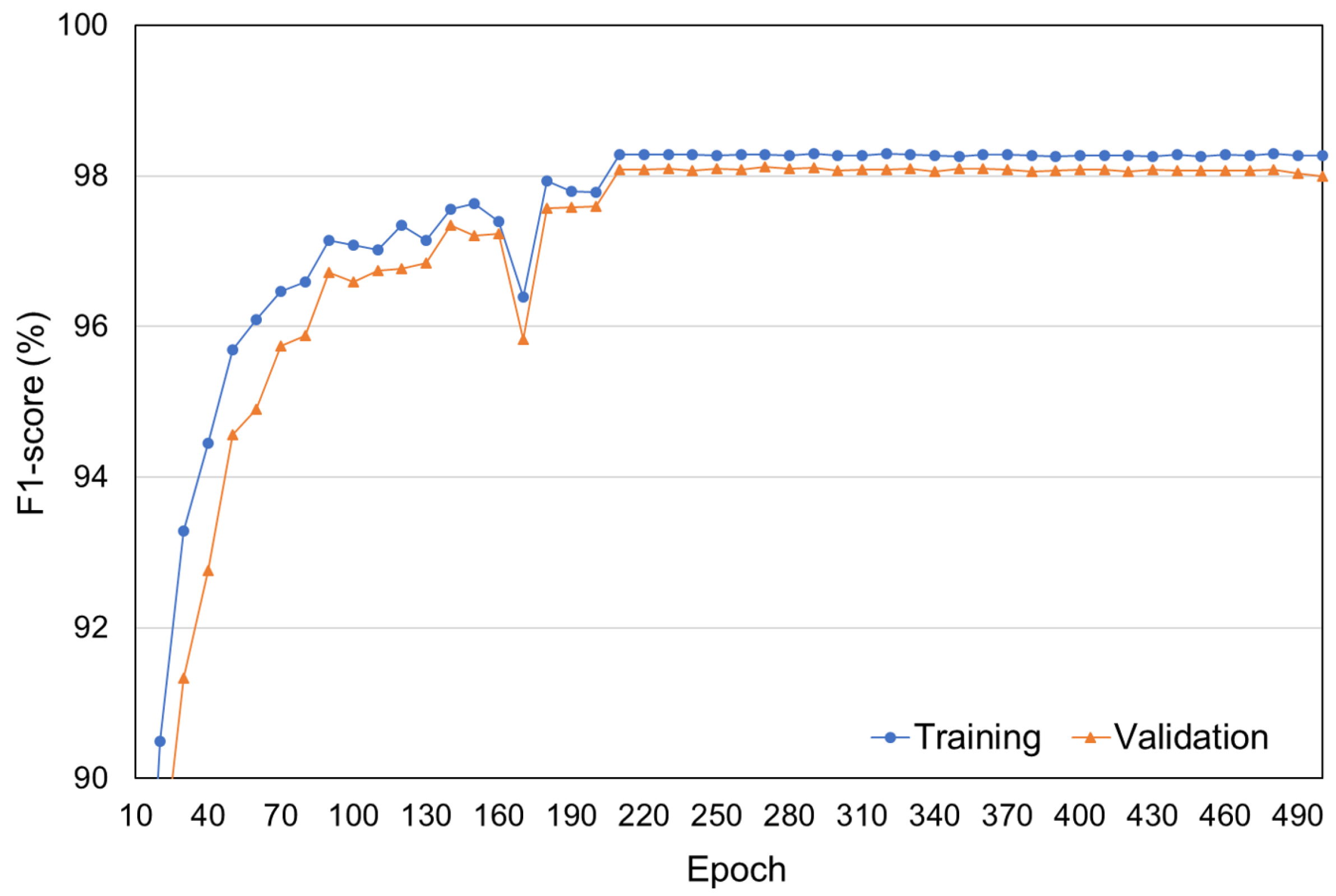
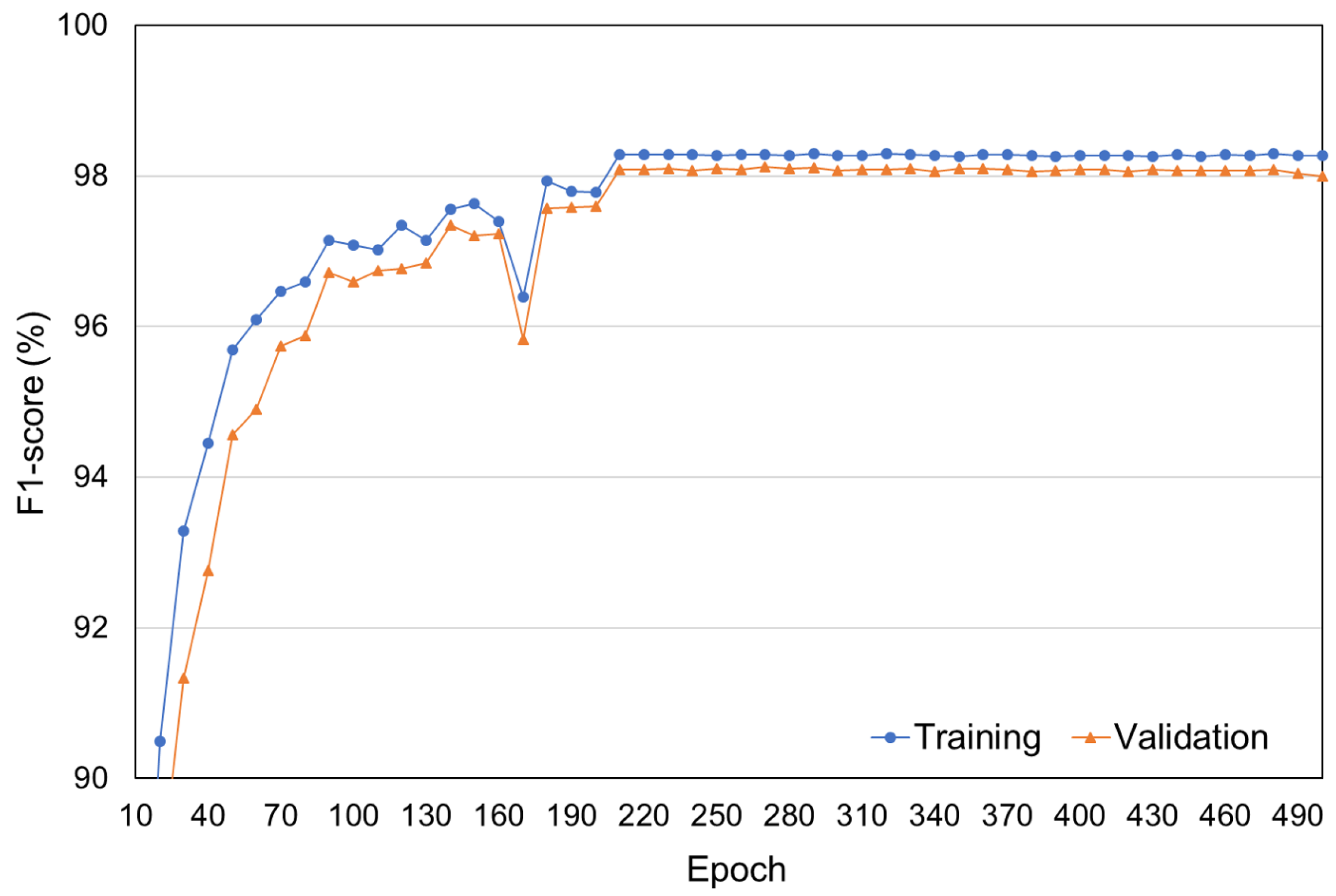
5.2. Training of Neural Networks
5.3. Sample-Level Accuracy
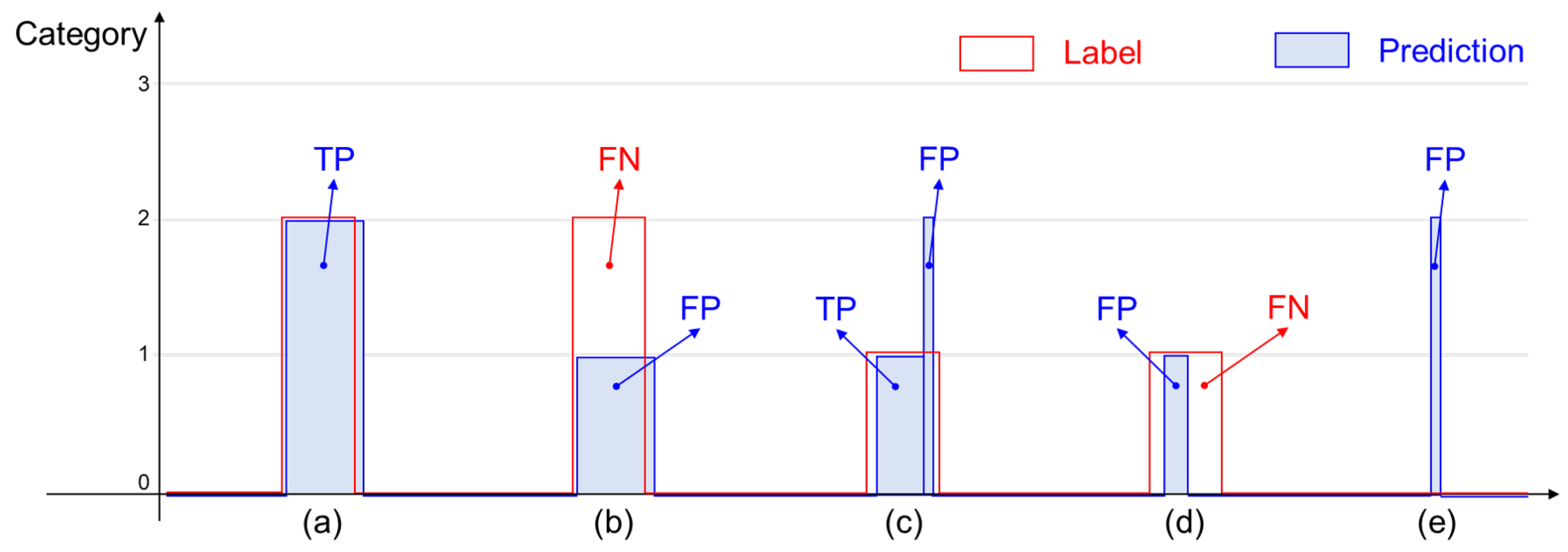
5.4. Collision-Level Accuracy
5.5. Analysis for the Processing Time
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Goodrich, M.A.; Schultz, A.C. Human-Robot Interaction: A Survey; Now Publishers Inc.: Boston, MA, USA, 2008. [Google Scholar]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Rob. 2018, 42, 957–975. [Google Scholar] [CrossRef] [Green Version]
- Haidegger, T. Autonomy for surgical robots: Concepts and paradigms. IEEE Trans. Med. Rob. Bionics 2019, 1, 65–76. [Google Scholar] [CrossRef]
- Berezina, K.; Ciftci, O.; Cobanoglu, C. Robots, Artificial Intelligence, and Service Automation in Restaurants; Emerald Group Publishing: Bingley, UK, 2020. [Google Scholar]
- Wilson, G.; Pereyda, C.; Raghunath, N.; de la Cruz, G.; Goel, S.; Nesaei, S.; Minor, B.; Schmitter-Edgecombe, M.; Taylor, M.E.; Cook, D.J. Robot-enabled support of daily activities in smart home environments. Cognitive Syst. Res. 2019, 54, 258–272. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, J.; Khan, Z.H.; Khalid, A. Prospects of robotics in food industry. Food Sci. Technol. 2017, 37, 159–165. [Google Scholar] [CrossRef] [Green Version]
- Petković, T.; Puljiz, D.; Marković, I.; Hein, B. Human intention estimation based on hidden Markov model motion validation for safe flexible robotized warehouses. Rob. Comput. Integr. Manuf. 2019, 57, 182–196. [Google Scholar] [CrossRef] [Green Version]
- Oudah, M.; Al-Naji, A.; Chahl, J. Hand gesture recognition based on computer vision: A review of techniques. J. Imaging 2020, 6, 73. [Google Scholar] [CrossRef] [PubMed]
- Vicentini, F. Collaborative robotics: A survey. J. Mech. Des. 2021, 143, 040802. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, S.; Jing, F.; Tan, M. A sensorless hand guiding scheme based on model identification and control for industrial robot. IEEE Trans. Ind. Inf. 2019, 15, 5204–5213. [Google Scholar] [CrossRef]
- Haddadin, S.; De Luca, A.; Albu-Schäffer, A. Robot collisions: A survey on detection, isolation, and identification. IEEE Trans. Rob. 2017, 33, 1292–1312. [Google Scholar] [CrossRef] [Green Version]
- Morikawa, S.; Senoo, T.; Namiki, A.; Ishikawa, M. Realtime collision avoidance using a robot manipulator with light-weight small high-speed vision systems. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007; pp. 794–799. [Google Scholar]
- Mohammadi Amin, F.; Rezayati, M.; van de Venn, H.W.; Karimpour, H. A mixed-perception approach for safe human–robot collaboration in industrial automation. Sensors 2020, 20, 6347. [Google Scholar] [CrossRef]
- Lu, S.; Chung, J.H.; Velinsky, S.A. Human-robot collision detection and identification based on wrist and base force/torque sensors. In Proceedings of the 2005 IEEE international Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 3796–3801. [Google Scholar]
- Lee, S.D.; Kim, M.C.; Song, J.B. Sensorless collision detection for safe human-robot collaboration. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2392–2397. [Google Scholar]
- Han, L.; Xu, W.; Li, B.; Kang, P. Collision detection and coordinated compliance control for a dual-arm robot without force/torque sensing based on momentum observer. IEEE/ASME Trans. Mechatron. 2019, 24, 2261–2272. [Google Scholar] [CrossRef]
- De Luca, A.; Albu-Schaffer, A.; Haddadin, S.; Hirzinger, G. Collision detection and safe reaction with the DLR-III lightweight manipulator arm. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Beijing, China, 9–15 October 2006; pp. 1623–1630. [Google Scholar]
- Briquet-Kerestedjian, N.; Makarov, M.; Grossard, M.; Rodriguez-Ayerbe, P. Generalized momentum based-observer for robot impact detection—Insights and guidelines under characterized uncertainties. In Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA), Maui, HI, USA, 27–30 August 2017; pp. 1282–1287. [Google Scholar]
- Mamedov, S.; Mikhel, S. Practical aspects of model-based collision detection. Front. Rob. AI 2020, 7, 162. [Google Scholar]
- Geravand, M.; Flacco, F.; De Luca, A. Human-robot physical interaction and collaboration using an industrial robot with a closed control architecture. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4000–4007. [Google Scholar]
- Sharkawy, A.N.; Koustoumpardis, P.N.; Aspragathos, N. Neural network design for manipulator collision detection based only on the joint position sensors. Robotica 2020, 38, 1737–1755. [Google Scholar] [CrossRef]
- Heo, Y.J.; Kim, D.; Lee, W.; Kim, H.; Park, J.; Chung, W.K. Collision detection for industrial collaborative robots: A deep learning approach. IEEE Rob. Autom. Lett. 2019, 4, 740–746. [Google Scholar] [CrossRef]
- Hu, J.; Xiong, R. Contact force estimation for robot manipulator using semiparametric model and disturbance Kalman filter. IEEE Trans. Ind. Electron. 2017, 65, 3365–3375. [Google Scholar] [CrossRef]
- Ren, T.; Dong, Y.; Wu, D.; Chen, K. Collision detection and identification for robot manipulators based on extended state observer. Control Eng. Pract. 2018, 79, 144–153. [Google Scholar] [CrossRef]
- Kouris, A.; Dimeas, F.; Aspragathos, N. A frequency domain approach for contact type distinction in human–robot collaboration. IEEE Rob. Autom. Lett. 2018, 3, 720–727. [Google Scholar] [CrossRef]
- Jo, S.; Kwon, W. A Comparative Study on Collision Detection Algorithms based on Joint Torque Sensor using Machine Learning. J. Korea Robot. Soc. 2020, 15, 169–176. [Google Scholar] [CrossRef]
- Pan, J.; Manocha, D. Efficient configuration space construction and optimization for motion planning. Engineering 2015, 1, 46–57. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Qian, K.; Schuller, B.W.; Wollherr, D. An online robot collision detection and identification scheme by supervised learning and bayesian decision theory. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1144–1156. [Google Scholar] [CrossRef]
- Birjandi, S.A.B.; Kühn, J.; Haddadin, S. Observer-extended direct method for collision monitoring in robot manipulators using proprioception and imu sensing. IEEE Rob. Autom. Lett. 2020, 5, 954–961. [Google Scholar] [CrossRef]
- Caldas, A.; Makarov, M.; Grossard, M.; Rodriguez-Ayerbe, P.; Dumur, D. Adaptive residual filtering for safe human-robot collision detection under modeling uncertainties. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 722–727. [Google Scholar]
- Makarov, M.; Caldas, A.; Grossard, M.; Rodriguez-Ayerbe, P.; Dumur, D. Adaptive filtering for robust proprioceptive robot impact detection under model uncertainties. IEEE/ASME Trans. Mechatron. 2014, 19, 1917–1928. [Google Scholar] [CrossRef]
- Birjandi, S.A.B.; Haddadin, S. Model-Adaptive High-Speed Collision Detection for Serial-Chain Robot Manipulators. IEEE Rob. Autom. Lett. 2020, 5, 6544–6551. [Google Scholar] [CrossRef]
- Min, F.; Wang, G.; Liu, N. Collision detection and identification on robot manipulators based on vibration analysis. Sensors 2019, 19, 1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, T.; Fan, J.; Fang, Q.; Zhu, Y.; Zhao, J. A new robot collision detection method: A modified nonlinear disturbance observer based-on neural networks. J. Intell. Fuzzy Syst. 2020, 38, 175–186. [Google Scholar] [CrossRef]
- Park, K.M.; Kim, J.; Park, J.; Park, F.C. Learning-based real-time detection of robot collisions without joint torque sensors. IEEE Rob. Autom. Lett. 2020, 6, 103–110. [Google Scholar] [CrossRef]
- Oord, A.V.D.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kalchbrenner, N.; Senior, A.; Kavukcuoglu, K. Wavenet: A generative model for raw audio. arXiv 2016, arXiv:1609.03499. [Google Scholar]
- Maceira, M.; Olivares-Alarcos, A.; Alenya, G. Recurrent neural networks for inferring intentions in shared tasks for industrial collaborative robots. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 665–670. [Google Scholar]
- Czubenko, M.; Kowalczuk, Z. A Simple Neural Network for Collision Detection of Collaborative Robots. Sensors 2021, 21, 4235. [Google Scholar] [CrossRef]
- Hinton, G.; Vinyals, O.; Dean, J. Distilling the knowledge in a neural network. arXiv 2015, arXiv:1503.02531. [Google Scholar]
- Park, W.; Kim, D.; Lu, Y.; Cho, M. Relational knowledge distillation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3967–3976. [Google Scholar]
- Meng, Z.; Li, J.; Zhao, Y.; Gong, Y. Conditional teacher-student learning. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 6445–6449. [Google Scholar]
- Yim, J.; Joo, D.; Bae, J.; Kim, J. A gift from knowledge distillation: Fast optimization, network minimization and transfer learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4133–4141. [Google Scholar]
- Romero, A.; Ballas, N.; Kahou, S.E.; Chassang, A.; Gatta, C.; Bengio, Y. Fitnets: Hints for thin deep nets. arXiv 2014, arXiv:1412.6550. [Google Scholar]
- Zagoruyko, S.; Komodakis, N. Paying more attention to attention: Improving the performance of convolutional neural networks via attention transfer. arXiv 2016, arXiv:1612.03928. [Google Scholar]
- Yim, J.; Joo, D.; Bae, J.; Kim, J. Learning efficient object detection models with knowledge distillation. In Proceedings of the 31st Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–7 December 2017; pp. 742–751. [Google Scholar]
- Hou, Y.; Ma, Z.; Liu, C.; Hui, T.W.; Loy, C.C. Inter-region affinity distillation for road marking segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 12486–12495. [Google Scholar]
- Gupta, S.; Hoffman, J.; Malik, J. Cross modal distillation for supervision transfer. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2827–2836. [Google Scholar]
- Papernot, N.; McDaniel, P.; Wu, X.; Jha, S.; Swami, A. Distillation as a defense to adversarial perturbations against deep neural networks. In Proceedings of the 2016 IEEE symposium on security and privacy (SP), San Jose, CA, USA, 22–26 May 2016; pp. 582–597. [Google Scholar]
- Liu, Y.; Chen, K.; Liu, C.; Qin, Z.; Luo, Z.; Wang, J. Structured knowledge distillation for semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2604–2613. [Google Scholar]
- Tarvainen, A.; Valpola, H. Mean teachers are better role models: Weight-averaged consistency targets improve semi-supervised deep learning results. arXiv 2017, arXiv:1703.01780. [Google Scholar]
- Ghahramani, Z. Probabilistic machine learning and artificial intelligence. Nature 2015, 521, 452–459. [Google Scholar] [CrossRef] [PubMed]
- Gal, Y.; Ghahramani, Z. Dropout as a bayesian approximation: Representing model uncertainty in deep learning. In Proceedings of the 33rd international conference on machine learning, New York, NY, USA, 19–24 June 2016; pp. 1050–1059. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Lakshminarayanan, B.; Pritzel, A.; Blundell, C. Simple and scalable predictive uncertainty estimation using deep ensembles. arXiv 2016, arXiv:1612.01474. [Google Scholar]
- Van Amersfoort, J.; Smith, L.; Teh, Y.W.; Gal, Y. Uncertainty estimation using a single deep deterministic neural network. In Proceedings of the 37rd International Conference on Machine Learning, Online, 12–18 July 2020; pp. 9690–9700. [Google Scholar]
- Zhang, Z.; Dalca, A.V.; Sabuncu, M.R. Confidence calibration for convolutional neural networks using structured dropout. arXiv 2019, arXiv:1906.09551. [Google Scholar]
- Tagasovska, N.; Lopez-Paz, D. Single-model uncertainties for deep learning. arXiv 2018, arXiv:1811.00908. [Google Scholar]
- Shen, Y.; Zhang, Z.; Sabuncu, M.R.; Sun, L. Real-time uncertainty estimation in computer vision via uncertainty-aware distribution distillation. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Online, 5–9 January 2021; pp. 707–716. [Google Scholar]
- Jin, X.; Lan, C.; Zeng, W.; Chen, Z. Uncertainty-aware multi-shot knowledge distillation for image-based object re-identification. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 11165–11172. [Google Scholar]
- Mehrtash, A.; Wells, W.M.; Tempany, C.M.; Abolmaesumi, P.; Kapur, T. Confidence calibration and predictive uncertainty estimation for deep medical image segmentation. IEEE Trans. Med. Imaging 2020, 39, 3868–3878. [Google Scholar] [CrossRef]
- Oh, D.; Ji, D.; Jang, C.; Hyunv, Y.; Bae, H.S.; Hwang, S. Segmenting 2k-videos at 36.5 fps with 24.3 gflops: Accurate and lightweight realtime semantic segmentation network. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Online, 31 May–31 August 2020; pp. 3153–3160. [Google Scholar]
- Kwon, W.; Jin, Y.; Lee, S.J. Collision Identification of Collaborative Robots Using a Deep Neural Network. IEMEK J. Embed. Syst. Appl. 2021, 16, 35–41. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Set | Validation Set | Test Set | ||||
|---|---|---|---|---|---|---|
| Collisions | 3906 | 558 | 1122 | |||
| Samples | Total | Collision | Total | Collision | Total | Collision |
| 19,563,048 | 781,200 | 2,778,777 | 111,600 | 5,798,685 | 224,400 | |
| Before Post-Processing | After Post-Processing | |||||
|---|---|---|---|---|---|---|
| Base model | 98.1611 | 98.3985 | 98.2796 | 98.5473 | 99.0617 | 98.8038 |
| Student network | 98.2015 | 98.3458 | 98.2736 | 98.5992 | 99.0198 | 98.8091 |
| Proposed method | 98.3110 | 98.4516 | 98.3812 | 98.7119 | 99.0465 | 98.8789 |
| Teacher network | 98.2729 | 98.5337 | 98.4031 | 98.5629 | 99.1011 | 98.8313 |
| Before Post-Processing | After Post-Processing | |||||
|---|---|---|---|---|---|---|
| Base model | 1119 | 229 | 3 | 1119 | 121 | 3 |
| Student network | 1118 | 295 | 4 | 1118 | 109 | 4 |
| Proposed method | 1120 | 205 | 2 | 1120 | 76 | 2 |
| Teacher network | 1119 | 267 | 3 | 1119 | 77 | 3 |
| Before Post-Processing | After Post-Processing | |||||
|---|---|---|---|---|---|---|
| Base model | 99.7326 | 78.9139 | 88.1102 | 99.7326 | 90.2419 | 94.7502 |
| Student network | 99.6436 | 79.1224 | 88.2052 | 99.6435 | 91.1165 | 95.1894 |
| Proposed method | 99.8217 | 84.5283 | 91.5406 | 99.8217 | 93.6454 | 96.6350 |
| Teacher network | 99.7326 | 80.7359 | 89.2344 | 99.7326 | 93.5619 | 96.5487 |
| Inference Time | Detection Delay | Post-Processing | Total | |
|---|---|---|---|---|
| Base model | 1.7641 | 0.8239 | 0.2057 | 2.7938 |
| Student network | 1.7641 | 0.6198 | 0.2057 | 2.5897 |
| Proposed method | 1.7641 | 0.6651 | 0.2057 | 2.6350 |
| Teacher network | 3.2348 | 0.7006 | 0.2057 | 4.1412 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, W.; Jin, Y.; Lee, S.J. Uncertainty-Aware Knowledge Distillation for Collision Identification of Collaborative Robots. Sensors 2021, 21, 6674. https://doi.org/10.3390/s21196674
Kwon W, Jin Y, Lee SJ. Uncertainty-Aware Knowledge Distillation for Collision Identification of Collaborative Robots. Sensors. 2021; 21(19):6674. https://doi.org/10.3390/s21196674
Chicago/Turabian StyleKwon, Wookyong, Yongsik Jin, and Sang Jun Lee. 2021. "Uncertainty-Aware Knowledge Distillation for Collision Identification of Collaborative Robots" Sensors 21, no. 19: 6674. https://doi.org/10.3390/s21196674
APA StyleKwon, W., Jin, Y., & Lee, S. J. (2021). Uncertainty-Aware Knowledge Distillation for Collision Identification of Collaborative Robots. Sensors, 21(19), 6674. https://doi.org/10.3390/s21196674