
Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Strategies for Pinch Motion Training
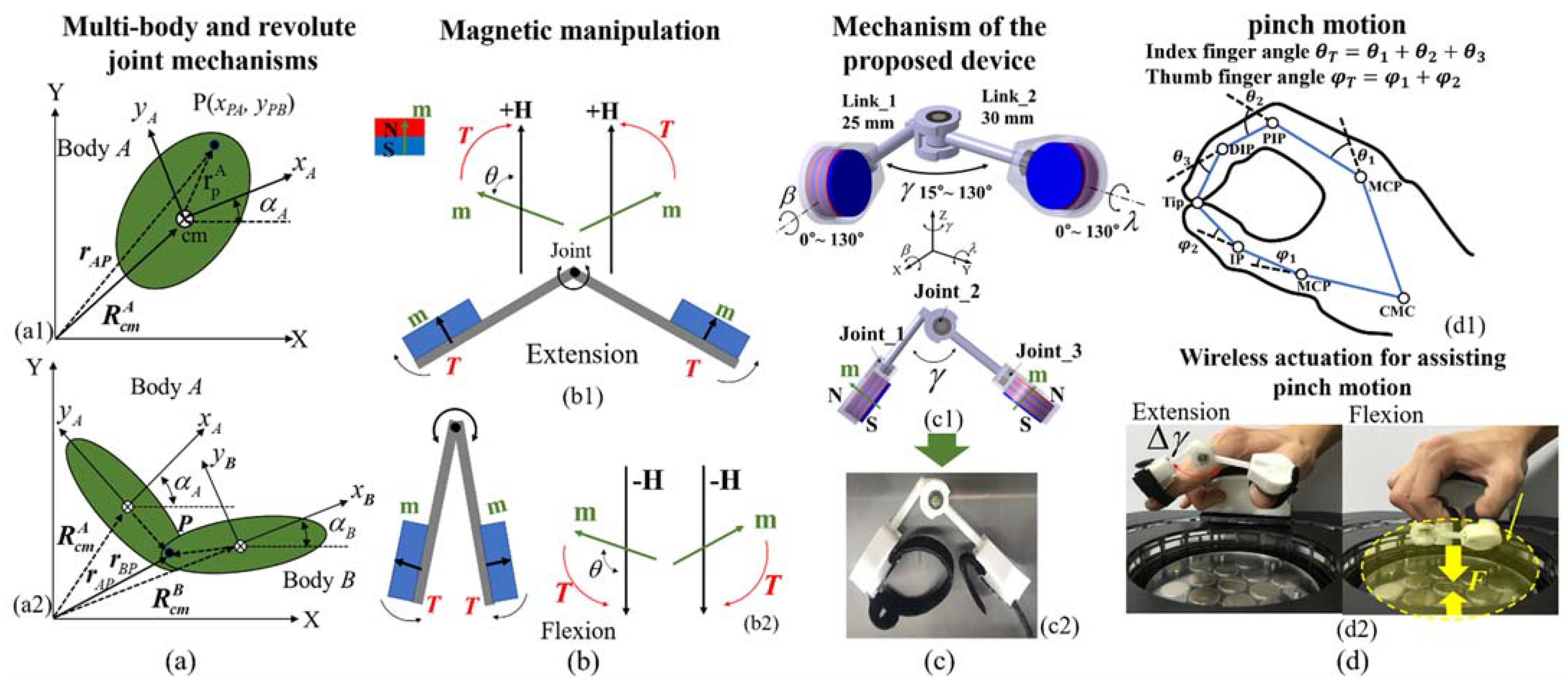
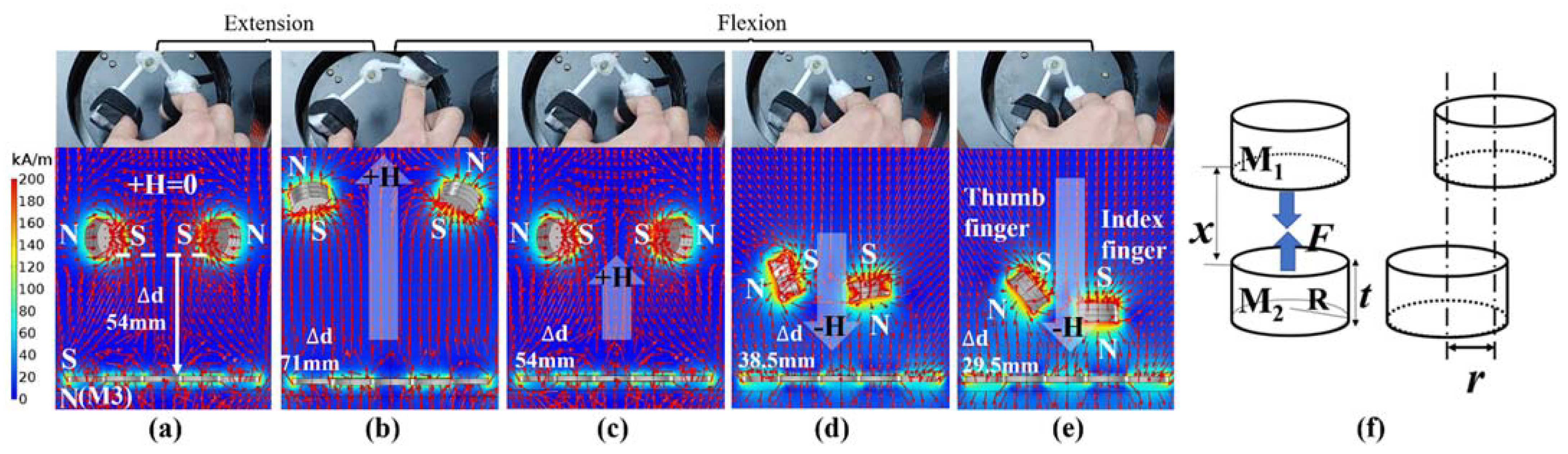
2.1. Magnetic Operation and Manipulation Principle
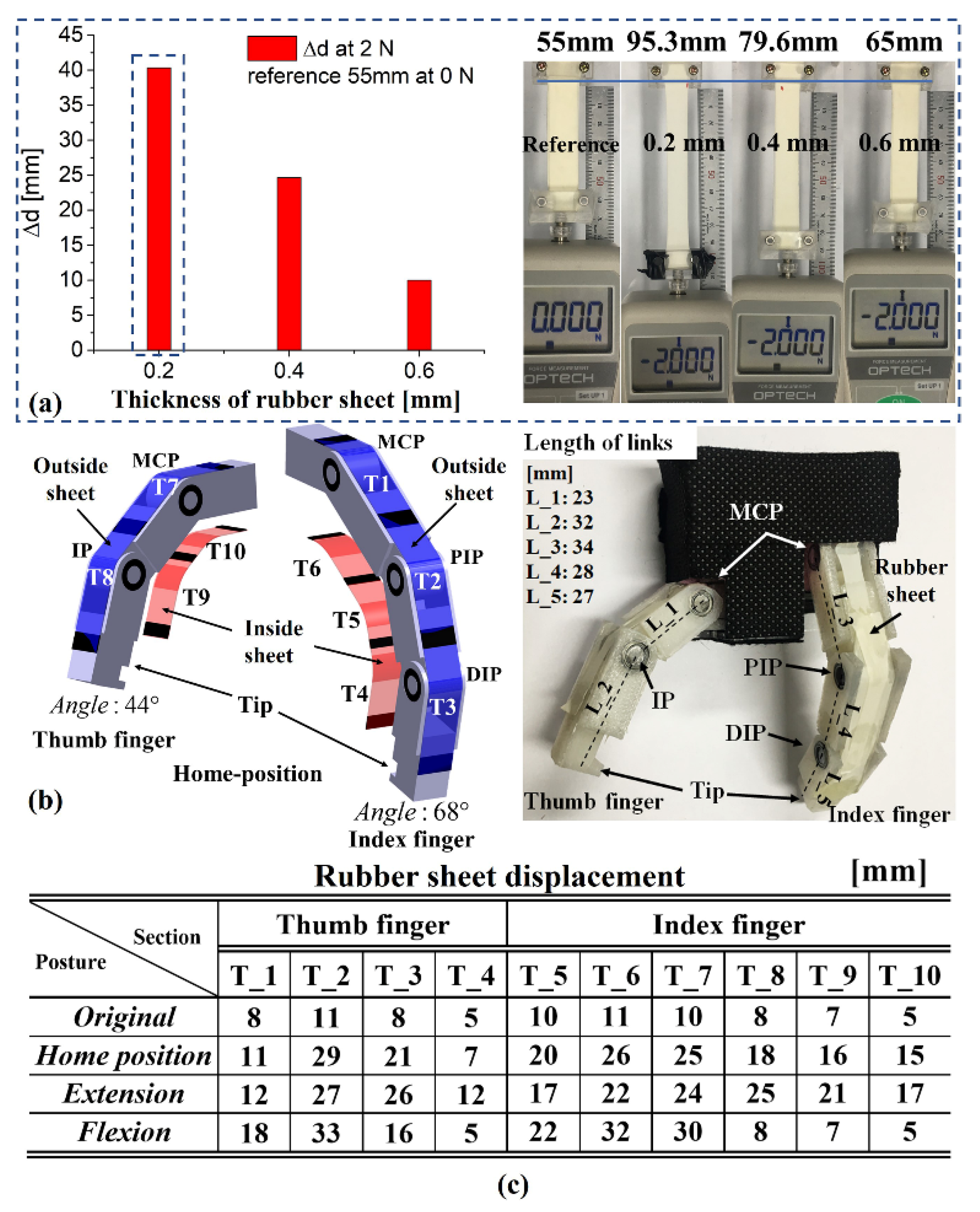
2.2. Fabrication and Configuration of the Magnetic Finger Device with Magnetic Actuation
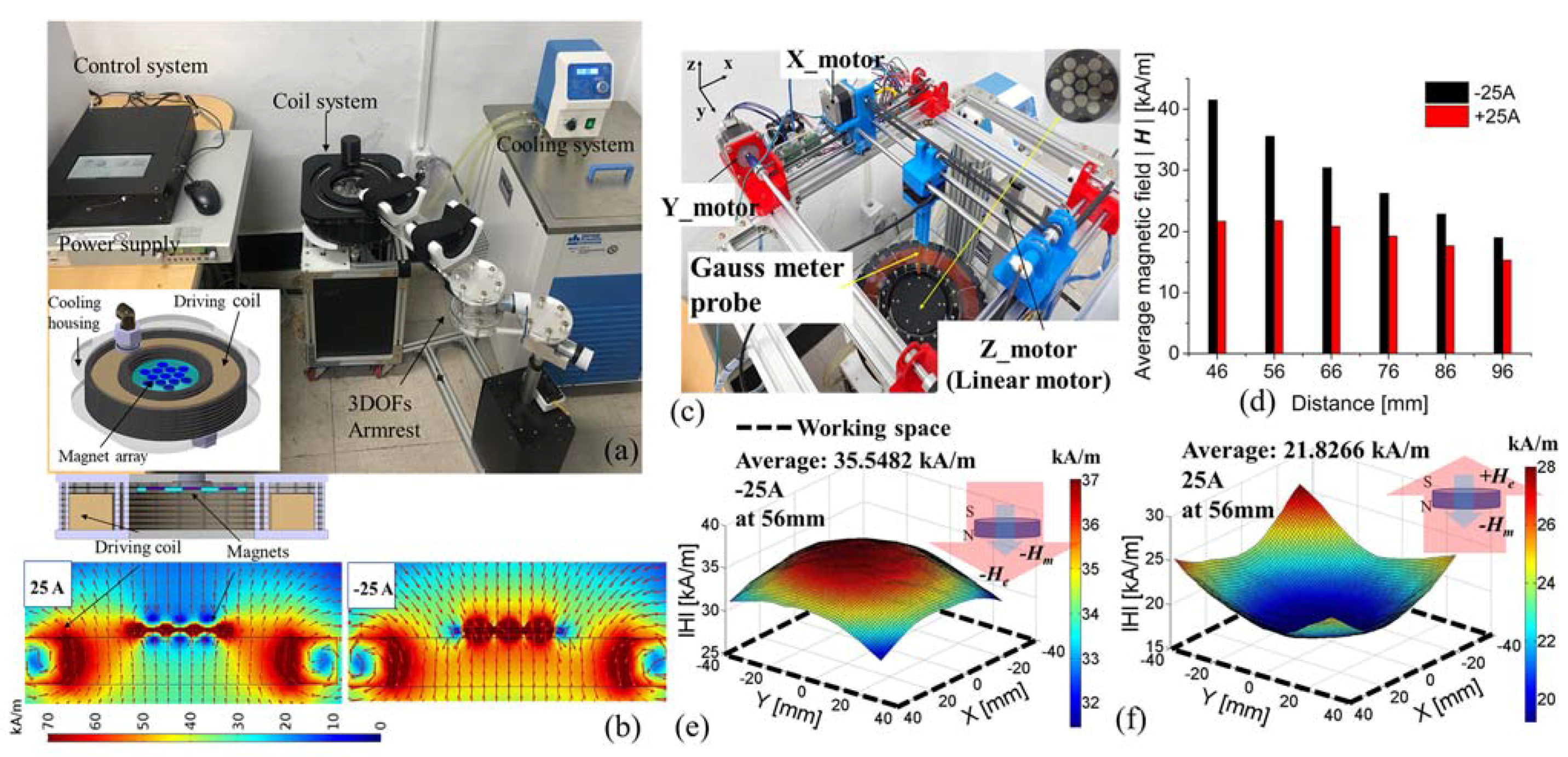
2.3. Control System Configuration and Instrumentation of the Driving Magnetic Field
3. Experimental Results and Analysis
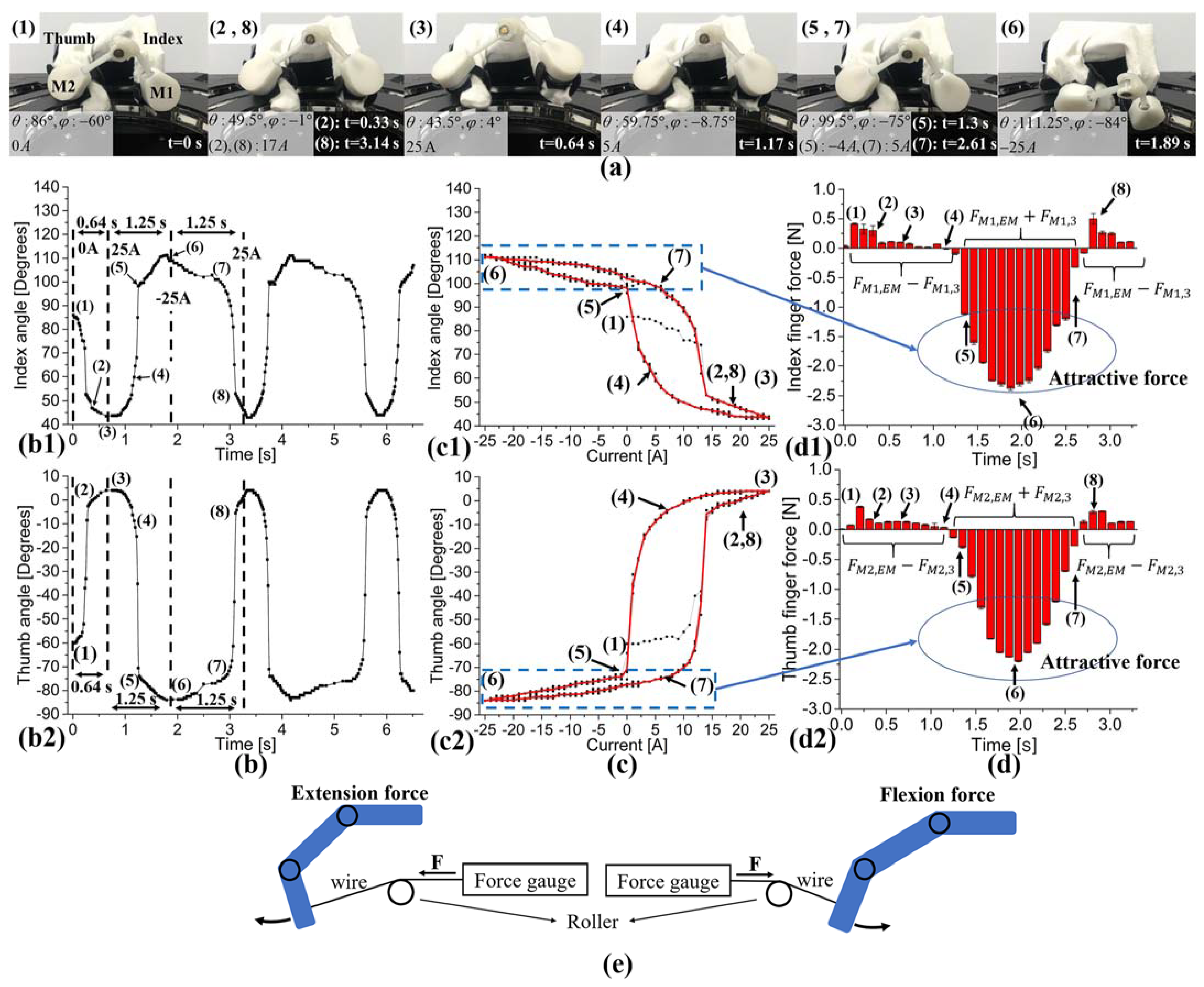
3.1. Observation of the Robotic Finger Pinch Motion by Magnetic Actuation
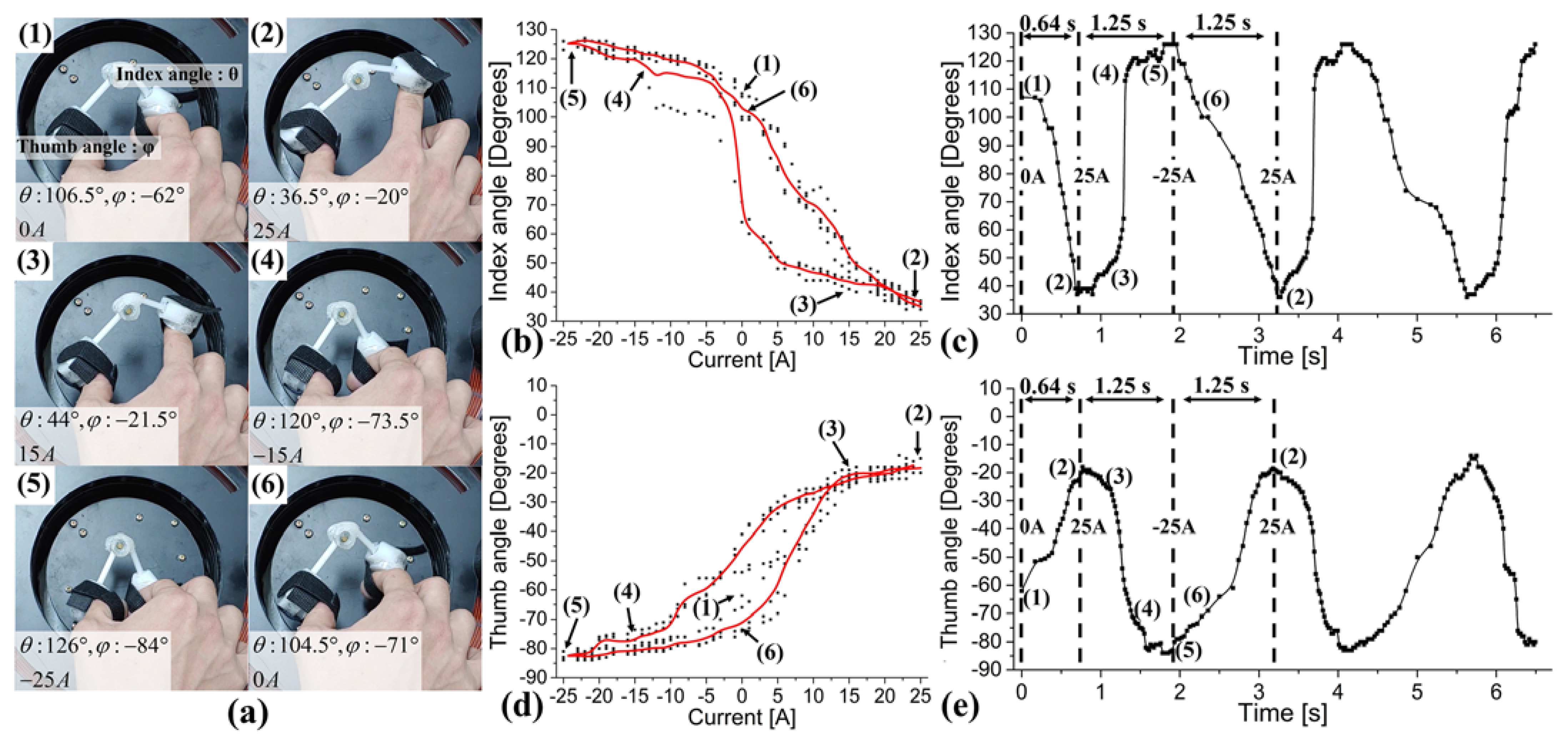
3.2. Observation of Human Finger Pinch Motion by Magnetic Actuation
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lang, C.E.; Beebe, J.A. Relating Movement Control at 9 Upper Extremity Segments to Loss of Hand Function in People with Chronic Hemiparesis. Neurorehabil. Neural Repair 2007, 21, 279–291. [Google Scholar] [CrossRef]
- Knecht, S.; Hesse, S.; Oster, P. Rehabilitation after Stroke. Deutsches Aerzteblatt Online 2011, 108, 600. [Google Scholar] [CrossRef]
- Ranganathan, V.K.; Siemionow, V.; Sahgal, V.; Liu, J.Z.; Yue, G.H. Skilled Finger Movement Exercise Improves Hand Function. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2001, 56, M518–M522. [Google Scholar] [CrossRef]
- Takahashi, C.D.; Der-Yeghiaian, L.; Le, V.; Motiwala, R.R.; Cramer, S.C. Robot-based hand motor therapy after stroke. Brain 2008, 131, 425–437. [Google Scholar] [CrossRef] [PubMed]
- Alexandre, R.; Postolache, O.; Girao, P.S. Physical Rehabilitation based on Smart Wearable and Virtual Reality Serious Game. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Pyk, P.; Ruckriem, B.; Pescatore, A.; Meyer-Heim, A.; Kiper, D.; Eng, K.; Wille, D.; Chevrier, E.; Hauser, Y.; Holper, L.; et al. A Paediatric Interactive Therapy System for arm and hand rehabilitation. In Proceedings of the 2008 Virtual Rehabilitation, Vancouver, BC, USA, 25–27 August 2008; pp. 127–132. [Google Scholar]
- Steinisch, M.; Tana, M.G.; Comani, S. A Post-Stroke Rehabilitation System Integrating Robotics, VR and High-Resolution EEG Imaging. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 849–859. [Google Scholar] [CrossRef]
- Jha, C.K.; Lal Chakraborty, A. Real-time Accurate Monitoring of Ten Finger Joint Angles Using a Fiber Bragg Grating Sensor-based Glove for use in Virtual Rehabilitation. In Proceedings of the 2019 Workshop on Recent Advances in Photonics (WRAP, Guwahati, India, 13–14 December 2019; pp. 1–3. [Google Scholar]
- White, D.; Burdick, K.; Fulk, G.; Searleman, J.; Carroll, J. A virtual reality application for stroke patient rehabilitation. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005; Volume 2, pp. 1081–1086. [Google Scholar]
- Bae, J.-H.; Kim, Y.-M.; Moon, I. Wearable hand rehabilitation robot capable of hand function assistance in stroke survivors. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012. [Google Scholar]
- Fischer, H.C.; Triandafilou, K.M.; Thielbar, K.O.; Ochoa, J.M.; Lazzaro, E.D.C.; Pacholski, K.A.; Kamper, D.G. Use of a Portable Assistive Glove to Facilitate Rehabilitation in Stroke Survivors with Severe Hand Impairment. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 344–351. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Meng, Q.; Meng, Q.; Li, X.; Yu, H. Design and Development of a Portable Exoskeleton for Hand Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2376–2386. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Ben-Tzvi, P.; Danoff, J. Hand Rehabilitation Learning System with an Exoskeleton Robotic Glove. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1323–1332. [Google Scholar] [CrossRef] [PubMed]
- Thielbar, K.O.; Triandafilou, K.M.; Fischer, H.C.; O’Toole, J.M.; Corrigan, M.L.; Ochoa, J.M.; Stoykov, M.E.; Kamper, D.G. Benefits of Using a Voice and EMG-Driven Actuated Glove to Support Occupational Therapy for Stroke Survivors. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 297–305. [Google Scholar] [CrossRef]
- Pu, S.-W.; Pei, Y.-C.; Chang, J.-Y. Decoupling Finger Joint Motion in an Exoskeletal Hand: A Design for Robot-Assisted Rehabilitation. IEEE Trans. Ind. Electron. 2020, 67, 686–697. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, M.; Li, Z. Design and Control of a Wearable Hand Rehabilitation Robot. IEEE Access 2018, 6, 74039–74050. [Google Scholar] [CrossRef]
- Camp, A.S.; Chapman, E.M.; Jaramillo Cienfuegos, P. Modeling and analysis of hydraulic piston actuation of McKibben fluidic artificial muscles for hand rehabilitation. Int. J. Robot. Res. 2019, 027836491987225. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Soft Robotics: Pneumatic Networks for Soft Robotics that Actuate Rapidly (Adv. Funct. Mater. 15/2014). Adv. Funct. Mater. 2014, 24, 2109. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.-H. A Fully Fabric-Based Bidirectional Soft Robotic Glove for Assistance and Rehabilitation of Hand Impaired Patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. Power assistive and rehabilitation wearable robot based on pneumatic soft actuators. In Proceedings of the 2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 29 August–1 September 2016; pp. 472–477. [Google Scholar]
- Yap, H.K.; Kamaldin, N.; Lim, J.H.; Nasrallah, F.A.; Goh, J.C.H.; Yeow, C.-H. A Magnetic Resonance Compatible Soft Wearable Robotic Glove for Hand Rehabilitation and Brain Imaging. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 782–793. [Google Scholar] [CrossRef]
- Soucacos, P.N. Indications and Selection for Digital Amputation and Replantation. J. Hand Surg. 2001, 26, 572–581. [Google Scholar] [CrossRef]
- Yokogawa, R.; Hara, K. Manipulabilities of the Index Finger and Thumb in Three Tip-Pinch Postures. J. Biomech. Eng. 2004, 126, 212–219. [Google Scholar] [CrossRef] [PubMed]
- Tsai, C.-L.; Lin, C.-F.; Lin, H.-T.; Liu, M.-F.; Chiu, H.-Y.; Hsu, H.-Y.; Kuo, L.-C. How kinematic disturbance in the deformed rheumatoid thumb impacts on hand function: A biomechanical and functional perspective. Disabil. Rehabil. 2017, 39, 338–345. [Google Scholar] [CrossRef]
- Kuo, L.-C.; Chiu, H.-Y.; Chang, C.-W.; Hsu, H.-Y.; Sun, Y.-N. Functional workspace for precision manipulation between thumb and fingers in normal hands. J. Electromyogr. Kinesiol. 2009, 19, 829–839. [Google Scholar] [CrossRef] [PubMed]
- Guo, S.; Zhang, F.; Wei, W.; Zhao, F.; Wang, Y. Kinematic analysis of a novel exoskeleton finger rehabilitation robot for stroke patients. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 924–929. [Google Scholar]
- Guo, S.; Zhang, W.; Guo, J.; Gao, J.; Hu, Y. Design and kinematic simulation of a novel exoskeleton rehabilitation hand robot. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1125–1130. [Google Scholar]
- Agarwal, P.; Fox, J.; Yun, Y.; O’Malley, M.K.; Deshpande, A.D. An index finger exoskeleton with series elastic actuation for rehabilitation: Design, control and performance characterization. Int. J. Robot. Res. 2015, 34, 1747–1772. [Google Scholar] [CrossRef]
- Agarwal, P.; Yun, Y.; Fox, J.; Madden, K.; Deshpande, A.D. Design, control, and testing of a thumb exoskeleton with series elastic actuation. Int. J. Robot. Res. 2017, 36, 355–375. [Google Scholar] [CrossRef]
- Cempini, M.; Cortese, M.; Vitiello, N. A Powered Finger–Thumb Wearable Hand Exoskeleton with Self-Aligning Joint Axes. IEEE/ASME Trans. Mechatron. 2015, 20, 705–716. [Google Scholar] [CrossRef]
- Marconi, D.; Baldoni, A.; McKinney, Z.; Cempini, M.; Crea, S.; Vitiello, N. A novel hand exoskeleton with series elastic actuation for modulated torque transfer. Mechatronics 2019, 61, 69–82. [Google Scholar] [CrossRef]
- Gabardi, M.; Solazzi, M.; Leonardis, D.; Frisoli, A. Design and Evaluation of a Novel 5 DoF Underactuated Thumb-Exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 2322–2329. [Google Scholar] [CrossRef]
- Baek, I.C.; Jeon, G.H.; Yu, C.H.; Kim, K.; Kim, S.H. Wireless Active Finger Rehabilitation Method Using Three-Axis Electromagnetic Manipulation. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Baek, I.-C.; Kim, M.S.; Kim, S.H. A Novel Nonmechanical Finger Rehabilitation System Based on Magnetic Force Control. J. Magn. 2017, 22, 155–161. [Google Scholar] [CrossRef][Green Version]
- Ji, D.M.; Kim, M.S.; Kim, S.H. Multi-Link Magnet Device with Electromagnetic Manipulation System for Assisting Finger Movements with Wireless Operation. Appl. Sci. 2021, 11, 6762. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, D.-M.; Jung, W.-S.; Kim, S.-H. Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements. Sensors 2021, 21, 6216. https://doi.org/10.3390/s21186216
Ji D-M, Jung W-S, Kim S-H. Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements. Sensors. 2021; 21(18):6216. https://doi.org/10.3390/s21186216
Chicago/Turabian StyleJi, Dong-Min, Won-Suk Jung, and Sung-Hoon Kim. 2021. "Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements" Sensors 21, no. 18: 6216. https://doi.org/10.3390/s21186216
APA StyleJi, D.-M., Jung, W.-S., & Kim, S.-H. (2021). Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements. Sensors, 21(18), 6216. https://doi.org/10.3390/s21186216